濟寧礦區BJ-54至WGS-84坐標轉換模型改進及精度分析①
2010-04-26 06:37:38劉永義黨亞民鄭作亞
全球定位系統 2010年1期
劉永義,黨亞民,鄭作亞,3
(1.中國測繪科學研究院大地測量與地球動力學研究所,北京100830;2.山東科技大學測繪科學與工程學院,山東青島266510;3.海島(礁)測繪技術國家測繪局重點實驗室,山東 青島266510)
0 引 言
隨著GPS導航定位技術的日臻完善,GPS測量技術也逐漸滿足了全球范圍、全天候、連續實時以及三維導航和定位服務的要求,并具有常規測量系統無法比擬的優點。GPS測量所采用的坐標系統是WGS-84坐標系,WGS坐標系是質心坐標系統[1],其原點位于地球的質心上,實際應用中需要轉化為國家大地坐標系或者地方坐標系。常用的三維坐標轉換模型有布爾莎模型、Molodensky模型、武測模型[2]等。這些轉換模型都為七參數模型,即3個坐標平移參數,3個旋轉角參數和1個尺度比參數。
我國自2008年7月1日開始啟用2000國家大地坐標系,國家測繪局在公告中提供了新坐標系的技術參數。公告同時對新舊坐標系的轉換和使用做出了說明:2000國家大地坐標系與現行國家大地坐標系轉換、銜接的過渡期為 8~10年。現有各類測繪成果,在過渡期內可沿用現行國家大地坐標系;2008年7月1日后新生產的各類測繪成果應采用 2000國家大地坐標系。現有地理信息系統,在過渡期內應逐步轉換到2000國家大地坐標系;2008年7月1日后新建設的地理信息系統應采用2000國家大地坐標系。
因此,坐標轉換就顯得尤為重要,但布爾薩模型適用于全球范圍的坐標轉換,且為了提高所求得參數的精度和穩定性,要求公共點均勻分布。而在實際應用中局部地區GPS控制網的范圍往往只有數十到數百平方千米,甚至更小。例如濟寧二號井,測區面積只有90 km2。這樣控制點的范圍就比較近,此時旋轉參數和平移參數的相關性很大,參數的精度和穩定性會出現坐標轉換的病態性問題[3],即微小的測量誤差或點位移動就會導致轉換參數值有很大誤差。
文獻[4]中提出的站心坐標轉換改進模型,能有效地削弱方程的病態問題,并可提高轉換參數精度。本文引用此改進模型,并對引文中驗證方法稍作改進,把引文中引進的1 cm誤差改為1 mm,更能說明布爾薩模型在此工程中進行改進的必要性,而且引入了高程坐標誤差,對其進行檢驗。因為GPS高程定位的精度相對于平面定位的精度本身就要低一些。但結果表明,高程中產生的誤差同樣對所得七參數結果也有很大影響。通過實測數據利用fortran編程[5],將布爾薩模型與改進模型求得的轉換參數進行了比較,驗證了站心坐標轉換改進模型比布爾薩模型更適用于小區域的坐標轉換。
1 布爾薩模型
布爾薩模型共采用了7個參數,分別是3個平移參數X0、Y0、Z0,3個旋轉參數 εX、εY、εZ(又稱為3個歐拉角)和一個尺度比參數m。布爾薩七參數公式[4]如下
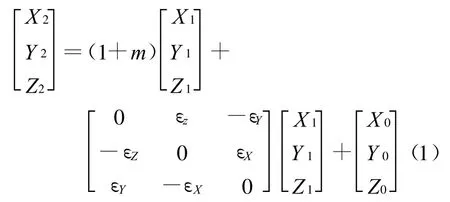
式中:X1、Y1、Z1是測站在已知坐標系中的坐標,X2、Y2、Z2是測站在待求坐標系中的坐標。
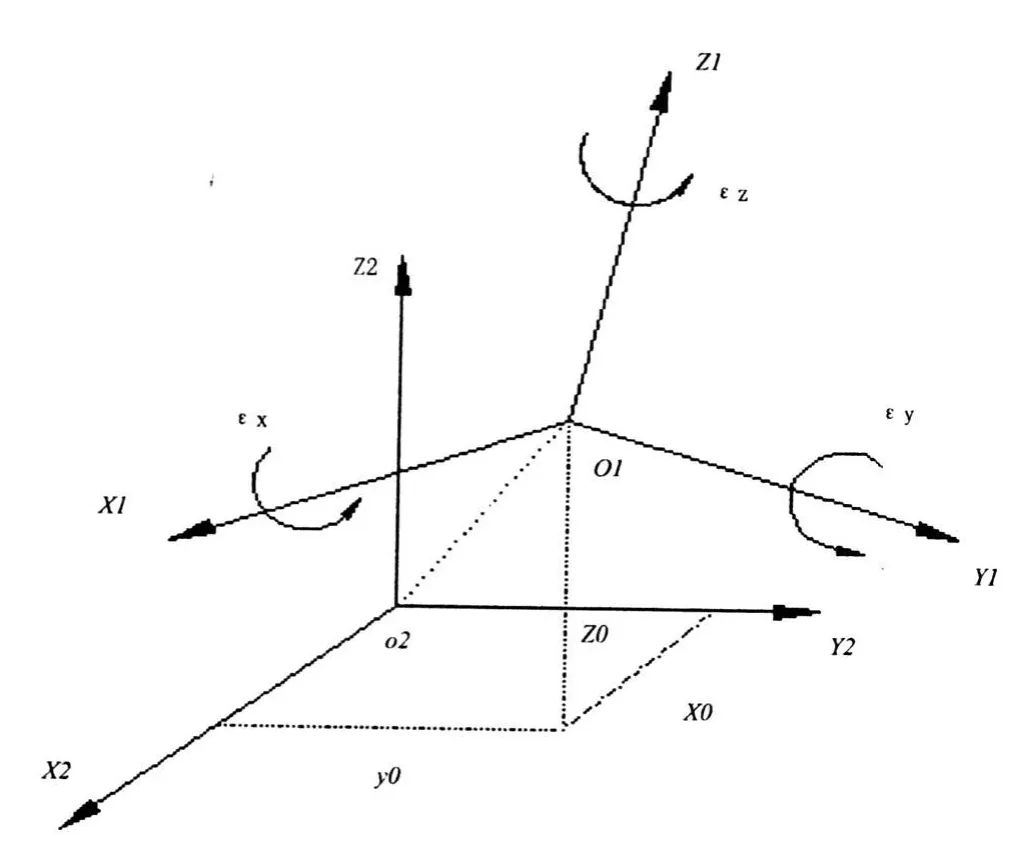
圖1 兩個空間直角坐標系之間的關系[6]
2 坐標轉換改進模型
坐標轉換改進模型主要采用站心坐標系,可以有效降低坐標轉換時平移參數之間的相關性,減少法方程矩陣的病態性。首先進行坐標系轉換,此處的坐標系轉換是指球心空間直角坐標系與站心直角坐標系之間的轉換,即將球心空間直角坐標系轉換為站心直角坐標系。
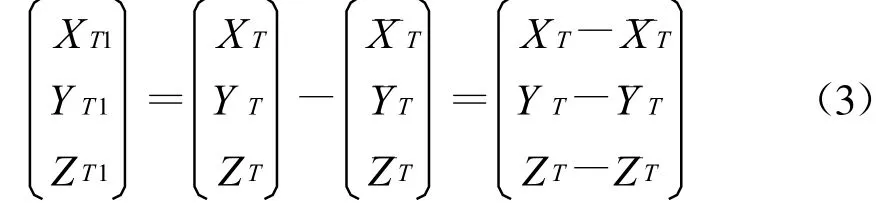
將公共點在WGS-84地心坐標系中的坐標以及在BJ-54坐標系中的坐標都分別轉換成相對于各自虛擬坐標原點(定義為點的平均坐標點)的站心坐標。
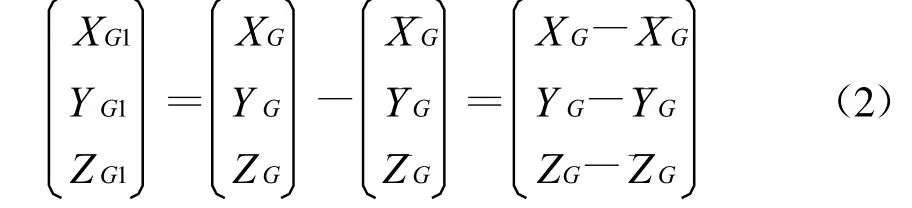
GPS坐標(XG,YG,ZG)轉換為站心坐標(XG 1,YG1,ZG1),首先求出各公共點的GPS平均坐標(ˉXG,ˉYG,ˉZG)作為其站心坐標的虛擬坐標原點,然后各點坐標分別減去其平均坐標,即將GPS坐標轉換為站心坐標(XG 1,YG1,ZG1),寫成公式為
地方坐標(XT,YT,ZT)轉換為站心坐標(XT1,YT1,ZT1),首先求出各公共點的地方坐標系平均坐標(ˉXT,ˉYT,ˉZT)作為其站心坐標的虛擬參考點,然后各點坐標分別減去該平均坐標便將地方坐標轉換為站心坐標(XT1,YT1,ZT1),寫成公式為
然后再經過坐標軸旋轉,坐標軸平移,尺度統一,最后得到的GPS坐標轉換的改進模型為
通過上式用3個或3個以上具有兩套坐標值的公共點便可解得轉換參數,然后利用求得的轉換參數進行點的坐標轉換,不過在轉換后要注意:將轉換后的坐標加上相對應的虛擬原點的坐標值才能得到相應的地心坐標或參心坐標[3]。
3 實測數據計算及分析
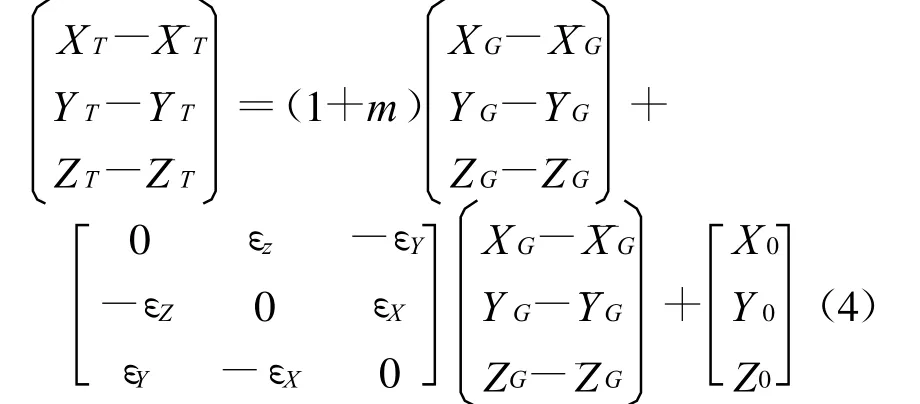
所用數據為濟寧二號煤礦兩套坐標系實測數據,測區面積90 km2,屬于局部區域,滿足本文開始所描述可能出現病態方程的情況。由于所驗證的是:當原始數據出現微小誤差時所求七參數的穩定性。因此驗證方法如下:對測區內所取點的其中一個點的三維坐標分別做微小改動,實驗中采用的是將點的X,Y,Z坐標分別改動0.001 m,其余坐標均不變,然后再用改動后點的坐標再次進行轉換參數的求解,分別采用布爾薩模型和改進模型進行實驗,比較兩個模型中每個點變動后所求解的轉換參數相對于初始值的變化情況,以檢驗其病態性。使用fortran語言,已知點為9個,實驗分析結果如表1、2所示:
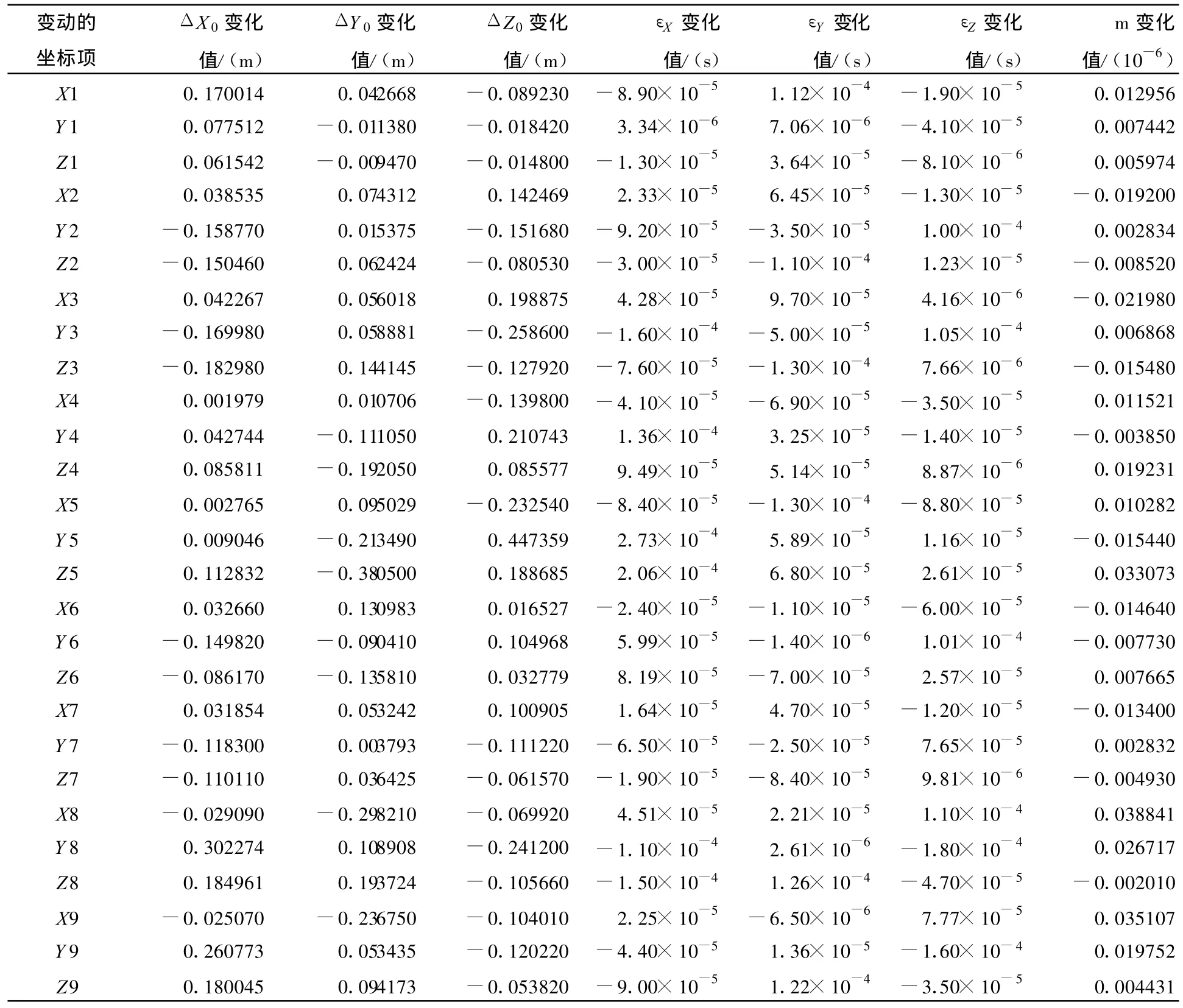
表1 布爾薩模型七參數變化值的檢驗
表2 改進模型七參數變化值的檢驗
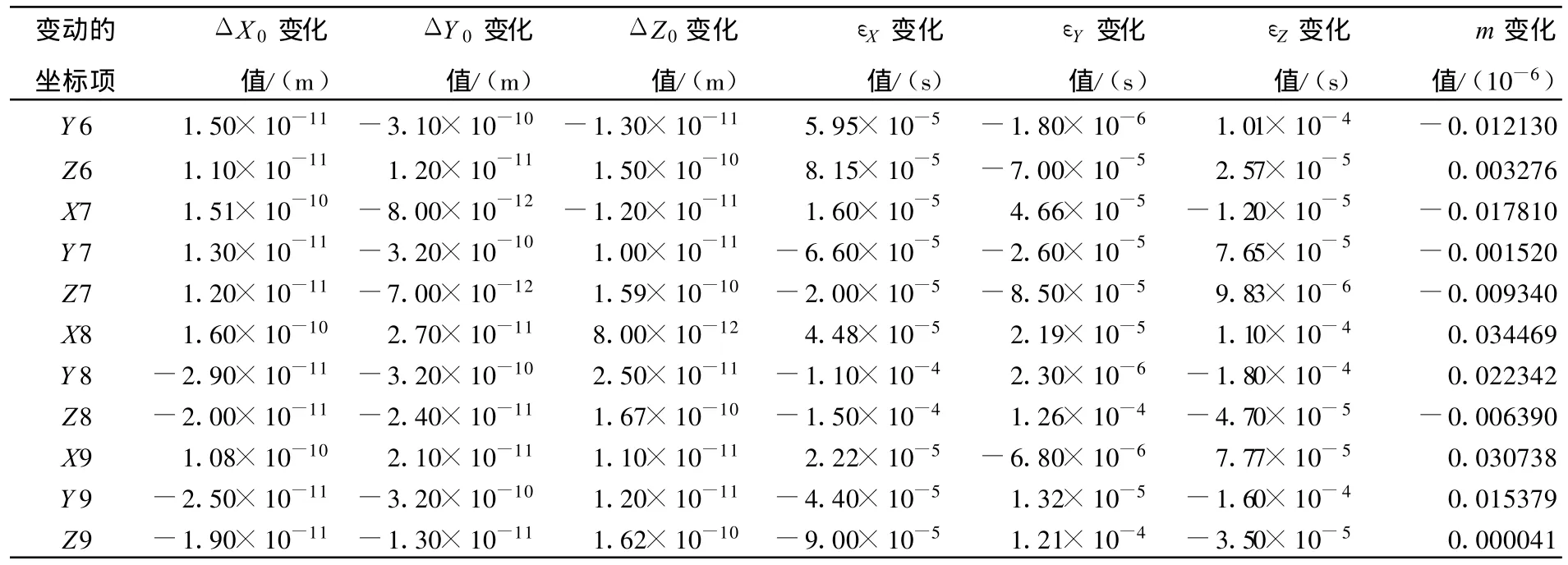
變動的坐標項ΔX0變化值/(m)ΔY0變化值/(m)ΔZ0變化值/(m)εX變化值/(s)εY變化值/(s)εZ變化值/(s)m變化值/(10-6)Y 6 1.50×10-11 -3.10×10-10 -1.30×10-11 5.95×10-5 -1.80×10-6 1.01×10-4 -0.012130 Z6 1.10×10-11 1.20×10-11 1.50×10-10 8.15×10-5 -7.00×10-5 2.57×10-5 0.003276 X7 1.51×10-10 -8.00×10-12 -1.20×10-11 1.60×10-5 4.66×10-5 -1.20×10-5 -0.017810 Y 7 1.30×10-11 -3.20×10-10 1.00×10-11 -6.60×10-5 -2.60×10-5 7.65×10-5 -0.001520 Z7 1.20×10-11 -7.00×10-12 1.59×10-10 -2.00×10-5 -8.50×10-5 9.83×10-6 -0.009340 X8 1.60×10-10 2.70×10-11 8.00×10-12 4.48×10-5 2.19×10-5 1.10×10-4 0.034469 Y 8 -2.90×10-11 -3.20×10-10 2.50×10-11 -1.10×10-4 2.30×10-6 -1.80×10-4 0.022342 Z8 -2.00×10-11 -2.40×10-11 1.67×10-10 -1.50×10-4 1.26×10-4 -4.70×10-5 -0.006390 X9 1.08×10-10 2.10×10-11 1.10×10-11 2.22×10-5 -6.80×10-6 7.77×10-5 0.030738 Y 9 -2.50×10-11 -3.20×10-10 1.20×10-11 -4.40×10-5 1.32×10-5 -1.60×10-4 0.015379 Z9 -1.90×10-11 -1.30×10-11 1.62×10-10 -9.00×10-5 1.21×10-4 -3.50×10-5 0.000041
以下為布爾薩模型和改進模型七參數變化值的比較圖:
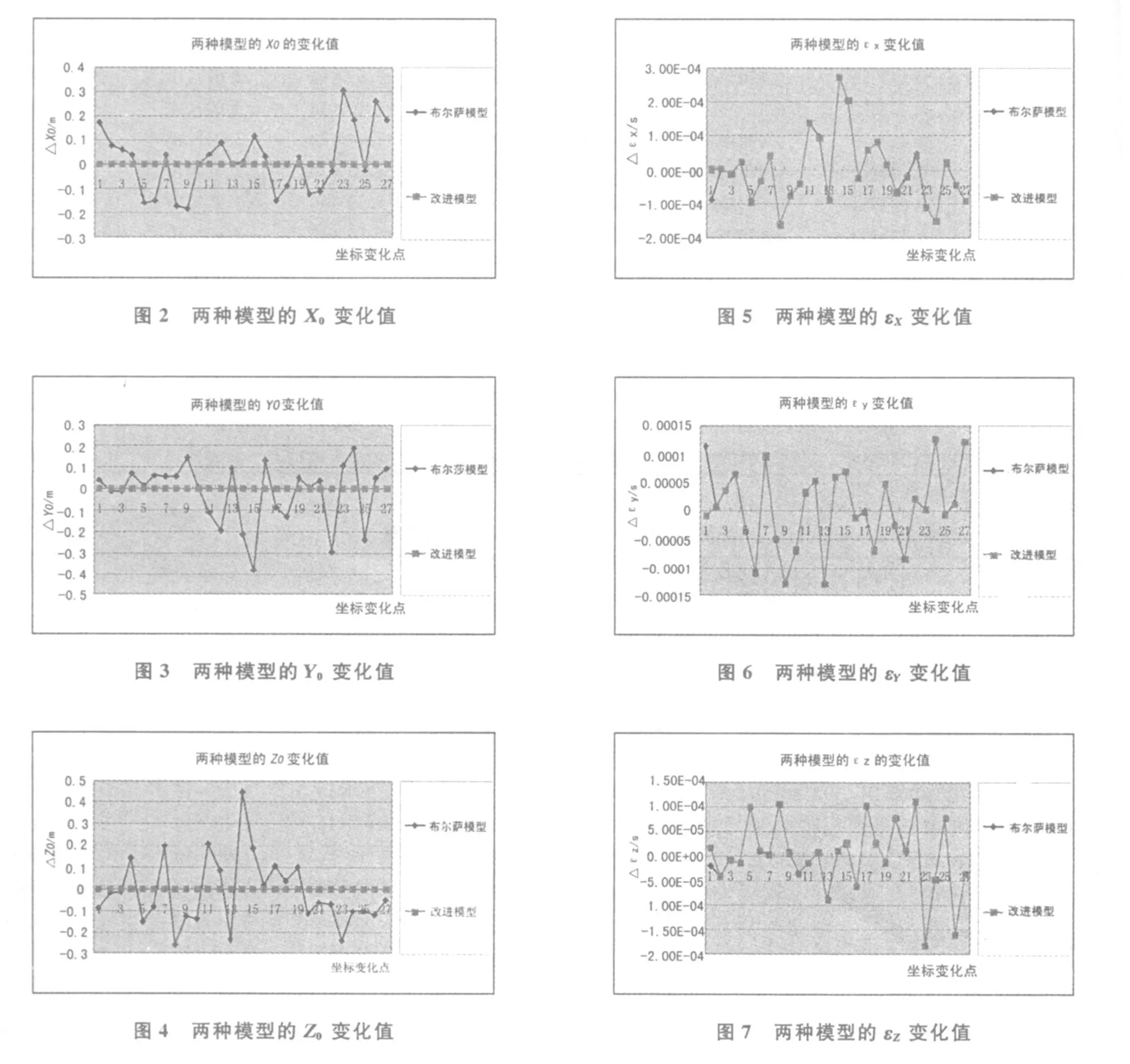
由以上圖表可以看出:測區1 mm的坐標誤差能引起布爾薩模型平移參數分米級的誤差,而只能引起改進模型10-10m級的誤差。因此,就GPS厘米級的定位誤差來說,布爾薩模型所求得的平移參數會更不穩定,而改進模型的計算結果就穩定多了(實際上對1 cm的誤差也做了檢驗,能引起布爾薩模型平移參數米級的誤差,而只能引起改進模型10-10m級的誤差)。但兩種模型中旋轉參數和比例參數的變化值相差不大,基本都在一個數量級上,可見此改正模型對旋轉參數和比例參數改進并不大,而對平移參數的影響很大。由此可見,改進模型能大大削弱方程的病態問題,從而大大提高平移參數的穩定性。
4 結 論
對濟寧礦區BJ-54至WGS-84坐標轉換的布爾薩模型進行了改進,利用實測數據通過fortran編程求出了布爾薩模型和改進模型的七參數,并通過分別改變實測數據的三維坐標引入了微小誤差,對這七個參數的變化值分別進行比較。結果表明,改進模型對于平移參數的計算結果比布爾薩模型要穩定很多,而對于旋轉參數和比例參數的計算結果兩者穩定性相差不大。因此,驗證了改進模型能夠有效提高平移參數的精度,一定程度上削弱了方程的病態問題,大大提高了平移參數的穩定性,更適用于如濟寧礦區這樣的小區域的坐標轉換。
[1] 范 震.WGS-84至BJ-54坐標轉換方法的探討[J].山西建筑,2008,34(12):354-355.
[2] 劉大杰,施一民,過靜珺.全球定位系統(GPS)的原理與數據處理[M].上海:同濟大學出版社,1996.
[3] 沈云中,胡雷鳴,李博峰.Bursa模型用于局部區域坐標變換的病態問題及其解法[J].測繪學報,2006,35(2):95-98.
[4] 張秋昭,張書畢,劉 軍.局部區域GPS網坐標轉換的改進模型[J].全球定位系統,2008,33(5):62-64.
[5] 武漢大學測繪學院測量平差學科組.誤差理論與測量平差基礎[M].武漢:武漢大學出版社,2003,1.
[6] 張華海,王寶山,趙長勝等.應用大地測量學[M].徐州:中國礦業大學出版社,2007.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
光學精密工程(2016年6期)2016-11-07 09:07:19
衛星與網絡(2015年12期)2015-10-27 02:21:46