一種新的單站紅外目標純方位參數航跡濾波方法
2010-03-27 06:55:36劉進忙姬紅兵樊振華張張珣
電子與信息學報 2010年9期
劉進忙 姬紅兵 樊振華 張張珣
①(西安電子科技大學電子工程學院 西安 710071)②(空軍工程大學導彈學院 三原 713800)
1 引言
本文作者總結出分坐標處理目標信息的思想,可利用靜止單站紅外傳感器所得到目標的純方位、純仰角信息分別建立目標的參數航跡,實現目標航跡濾波和目標跟蹤。文獻[7]提出了余切關系定理,利用方位序列僅提取目標的航向角不變量,實現了單站航向角的估計及兩站目標其它航跡參數的解算與目標跟蹤。文獻[8]總結了靜止單站的目標方位序列的擬線性估計算法(PLE)和使用輔助變量的目標定位算法(INVPLE)。本文提出純方位參數航跡模型建立與濾波算法,較好地解決了紅外單站的目標參數航跡跟蹤問題。
2 直線運動目標的航跡參數計算原理
2.1 勻速直線運動目標的航跡參數濾波
勻速直線運動目標航跡在平面直角坐標中的示意圖如圖1所示。觀測站在O點,設目標沿直線l做勻速直線運動,目標航向角為α0,在t時刻的觀測目標的方位角為βt,該點與航跡的垂足點距離為V(t?t⊥),其中V為目標在平面的速度值,則目標的運動方程為

紅外觀測模型:

考慮觀測站到目標航線上各個點坐標對測量誤差影響的大小不同,根據方位誤差在航跡直線上幾何投影關系,設置誤差加權值,當測量方差相同時==…==σ2,可構造出參量加權最小二乘目標函數為
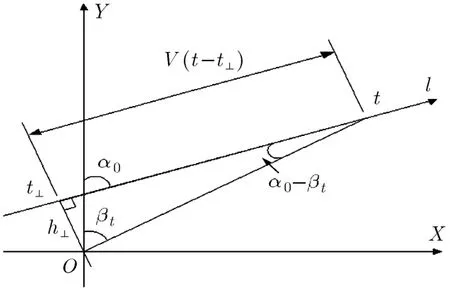
圖1 目標勻速直線運動水平面示意圖
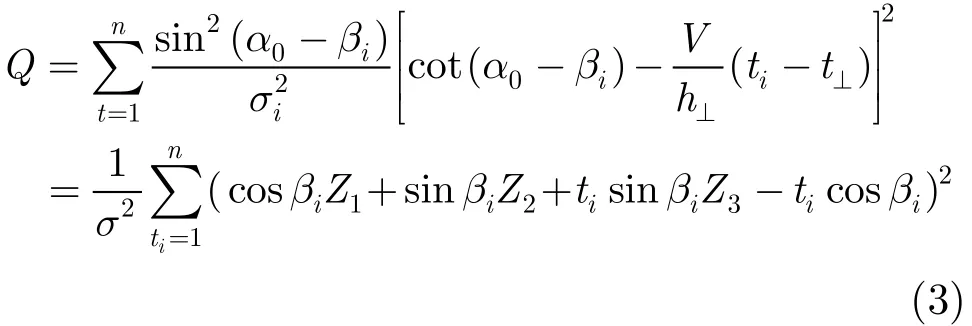
其中Z1=t⊥+(h⊥/V)cot α0,Z2=(h⊥/V)?t⊥cot α0,Z3=cot α0。而h⊥/V, t⊥,cot α0為勻速直線運動目標的航跡參數,Z1, Z2, Z3為勻速直線運動目標的航跡計算參數,前兩項的物理意義是目標沿航跡過Y,X坐標軸的交點時刻的參數值。
使該目標函數Q達到最小值,可對Z1, Z2, Z3求偏導數并令為零,可得方程:
3.堅定不移地狠抓動物調運監管,確保有效防堵“外疫”入侵。規范調運動物備案準入管理,嚴把調運前備案審批、指定道口準入和引入后隔離檢疫監管“三道關”,有效防止了外疫傳入。近3年共備案從區外調入屠宰動物1 500批次,非屠宰動物130批次,區外引種審批23批次,引種8 230頭,未發生審批不當引發重大動物疫情。加強了大有周邊道路防疫檢查消毒綜合檢查站容站貌、各項制度和標準化服務窗口的建設,配備了4名專職執法人員和必要的設施設備,堅持24小時值班制度,日均檢查和消毒運輸動物車廂15車次以上,2010年至2012年,成功攔截并無害化處理從外省入渝染疫動物3車次72頭。

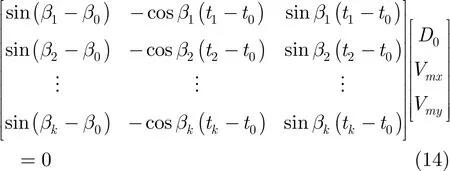
當分別在t1,t2,…,tn時刻采樣方位序列時,則有矩陣形式:
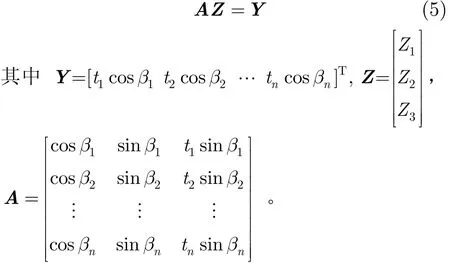
由于觀測噪聲nβi的影響,只能得到包含噪聲成分的矩陣A和Y。利用總體最小二乘(TLS, Total Least Squares)方法[8]求解方程,較最小二乘方法更為合理、有效。目標航跡計算參數:

式中v為對增廣矩陣[?Y A]進行奇異值分解后,最小奇異值所對應的右奇異向量,v(i)為向量v中的第i個元素。可解出目標的航跡參數值:
在純方位觀測條件下,單站可求解得到的目標參數航跡值:cotα0,h⊥/V ,t⊥。具體的h⊥,V值不能由單站解算得到,需多站航跡參數融合求解。
利用t1,t2,…,tn時刻計算得出的航跡參數,可預測出tn+1時刻目標的觀測方位角。

2.2 勻加速直線運動目標的參數航跡濾波
勻加速直線運動航跡在平面直角坐標中的示意圖如圖2所示。觀測站在O點,設目標沿直線l做勻加速直線運動,目標航向角為α0,在t0時刻的觀測方位角為β0,t時刻的觀測方位角為βt,兩點的距離為V(t?t0)+(a/2)(t?t0)2,其中V,a分別為在t0時刻的速度、加速度,則有目標位置計算公式為
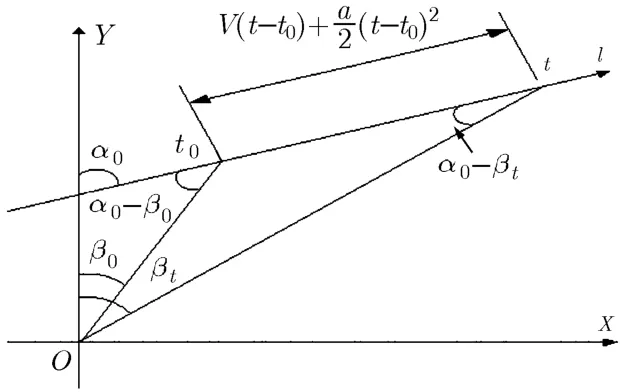
圖2 目標勻加速直線運動水平面示意圖

其原理類同勻速直線情況,采用加權來處理各測量時刻,構造參量加權最小二乘目標函數為
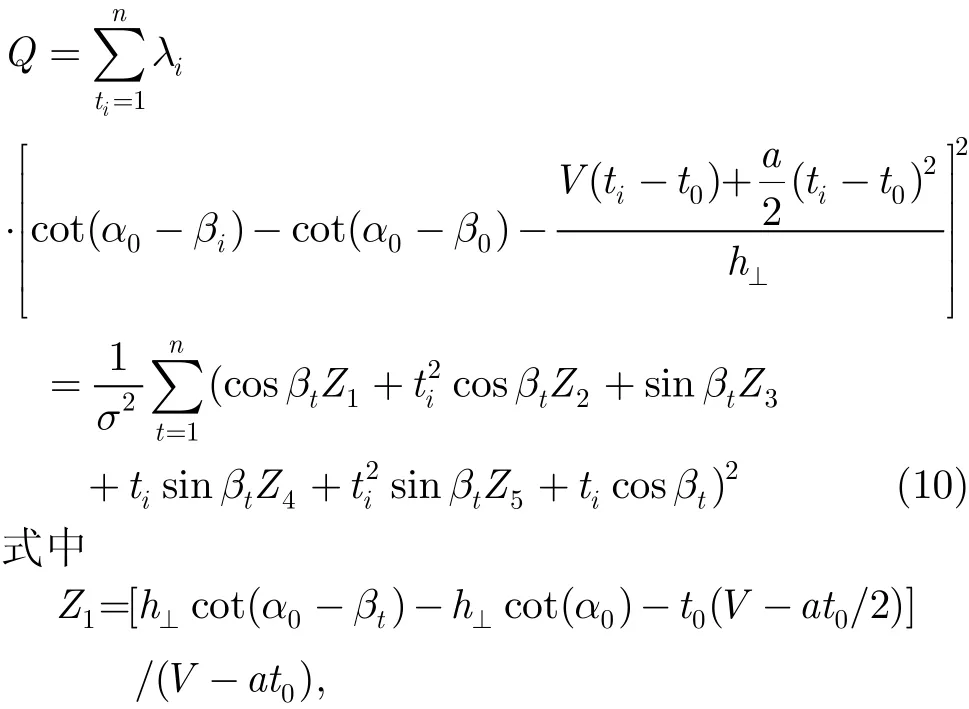

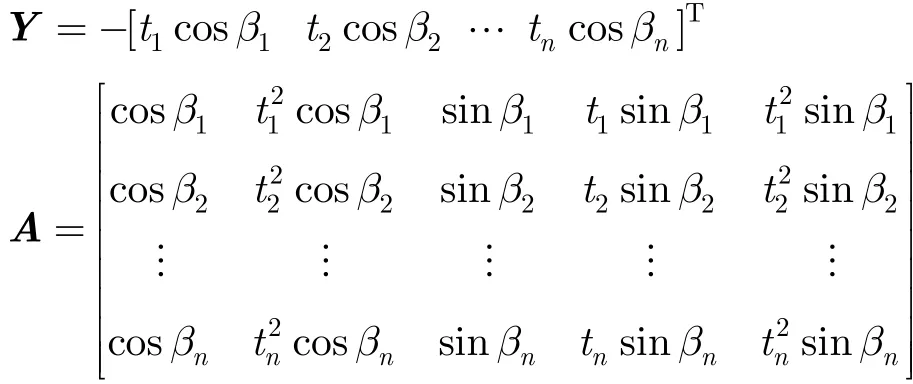
為使該目標函數Q達到最小值,可對Z1, Z2,Z3,Z4,Z5求偏導數并令為零,可得方程

故有以下矩陣形式:

求解該方程組,同樣使用總體最小二乘(TLS)方法[7],在此不再贅述。
3 直線運動目標的參數航跡濾波仿真
3.1 勻速直線運動目標的參數航跡濾波仿真
仿真環境:采樣周期T =0.05 s,即每秒鐘采樣20幀,相鄰兩幀的時間間隔為0.05 s ,仿真場景中的觀測噪聲nβt~N (0,),σt=0.001。以下均采用相同的仿真環境。目標初始狀態 X(1)=[x(1) vx(1)y(1) vy(1)]=[-2000,100,1000,1000] ,航向角α0=0.0997 rad。濾波窗設為 W=30,40。結果如圖3所示。
仿真結果分析:由圖3可知,濾波窗寬度W=40的濾波效果明顯優于W=30的仿真結果。為達到更好的濾波效果,可總結如下:
(1)當選擇較大窗時,對噪聲的抑制作用較強,估計相對平穩,更接近真實值。但增加了計算量,將導致對曲線運動的估計存在較大的滯后。
(2)通過調整部分參數再進行實驗,比較其結果說明,在80T以后,誤差曲線有一些較大的波動,這是由于采用窗的長度、目標遠離航跡垂直點引起非線性計算誤差增大所致。可以通過適當地增加窗的長度進行有效抑制。
3.2 采用勻速直線模型對分段機動目標進行濾波
由于紅外觀測站的采樣率較高,在較短的時間間隔內目標運動距離也相對較短,可近似用直線運動來處理,從而機動曲線運動軌跡可分段用2.1節推導出的勻速直線運動濾波算法分段逼近。
(1)對勻速轉彎機動目標的參數航跡濾波
初始狀態X(1)=[x(1)vx(1)ax(1)y(1)vy(1)ay(1)]=[-1000,0,40,100,200,0],航向角α0初始值為0 rad,將隨時間呈線性變化,線速度 V=200 m/s ,轉彎半徑 r=1000 m。濾波窗W=24,30。
仿真結果如圖4所示,濾波窗寬度W=40的濾波效果明顯優于W=30的仿真結果,且均方誤差較小,在可接受范圍內。
(2)對分段變加速機動目標的參數航跡濾波
初始狀態X(1)=[x(1)vx(1)ax(1)y(1)vy(1)ay(1)]=[-200,5,60,200,300,10],在 t=30 幀時,加速度突變為[0, -80] m2/s,并一直持續至仿真結束,航向角α0初始值為0.0167 rad將隨時間呈非線性變化。濾波窗 W=30,40。
仿真結果如圖5所示,濾波窗寬度W=40的濾波效果明顯優于W=30的仿真結果,均方誤差在機動目標快速轉彎的時間段80~120幀(0.05 s)范圍內有所增大,未丟失目標。在目標轉彎后,均方誤差又迅速減小,仍有效跟蹤機動目標。
4 靜止單站純方位的其它方法仿真比較
經典的純方位角目標分析算法[8]有PLE,IVPLE算法。PLE算法引入偽測量,將方位測量方程轉化為具有線性形式的偽測量方程,直接利用幾何圖形推導出齊次方程求解。
可計算得到目標航向角和其它參數。而本文算法直接利用式(7)得到航跡參數。兩種算法都可以得到目標航向這幾個重要參數。在相同的實驗條件下,將本文算法與PLE算法性能相比較,如圖6所示,本文算法的目標航向角的精度略高。
IVPLE算法可消除PLE算法的有偏性,采用輔助變量方法取得較好的效果。其思路是用解算參數來預測目標的方位,替代觀測矩陣中的測量方位,試圖形成與等效測量誤差在統計上的解耦。在相同的實驗條件下,將本文算法與IVPLE算法對目標航行角估計性能相比較,如圖7所示,可看出本文算法的目標航向角的精度略高。
5 結論
本文提出直接采用方位坐標處理,從幾何模型出發推導出勻速直線濾波模型,用一組航跡參數代替了目標的速度、加速度,以表征目標的運動特性,可實現目標參數航跡的濾波與跟蹤。該方法為多傳感器實現參數航跡融合奠定良好的基礎,對校正傳感器的系統誤差有重要的作用,其物理意義明確,計算簡單、實用,思路新穎,使得傳感器組網更加靈活、簡便。
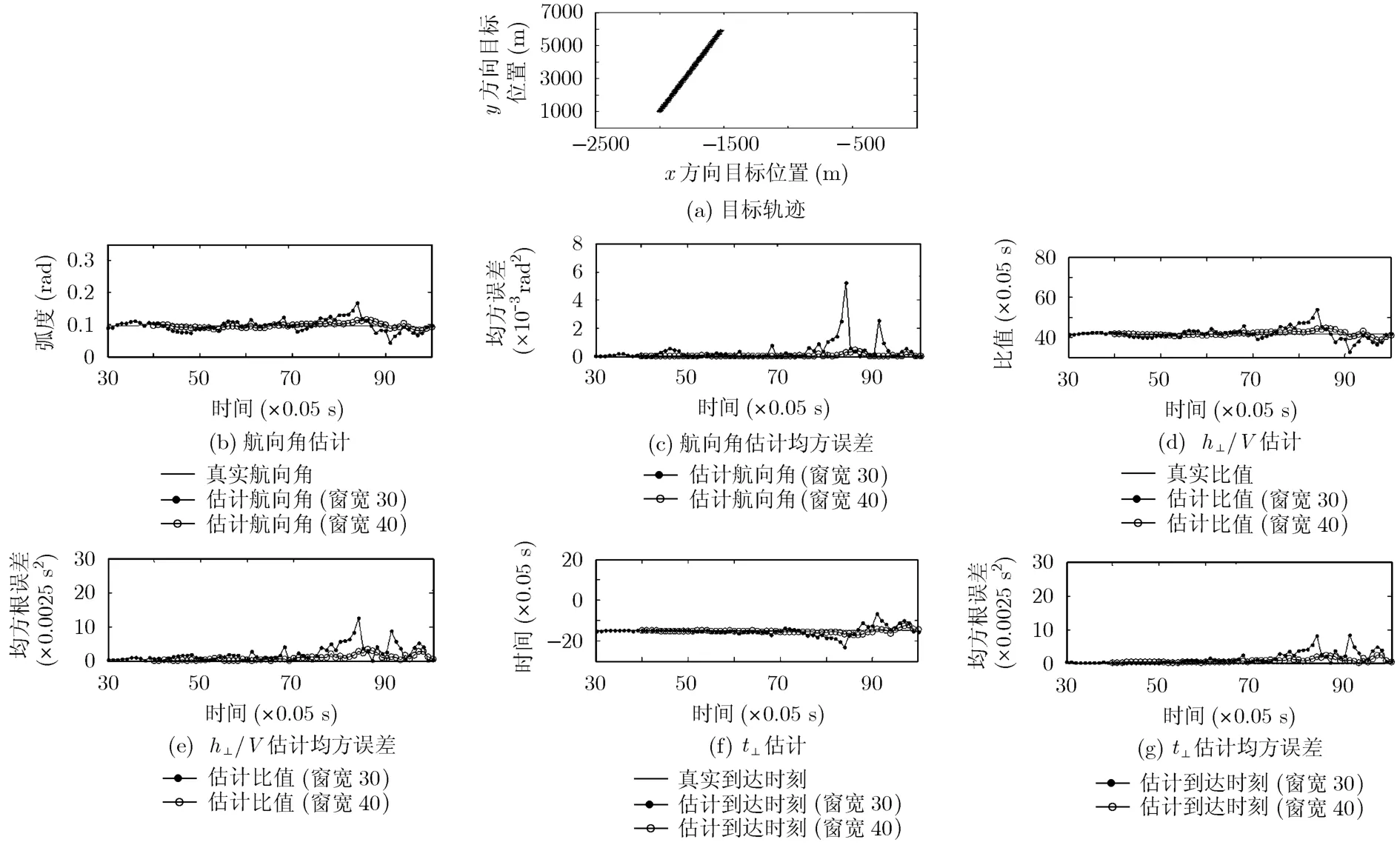
圖3 勻速直線運動仿真結果
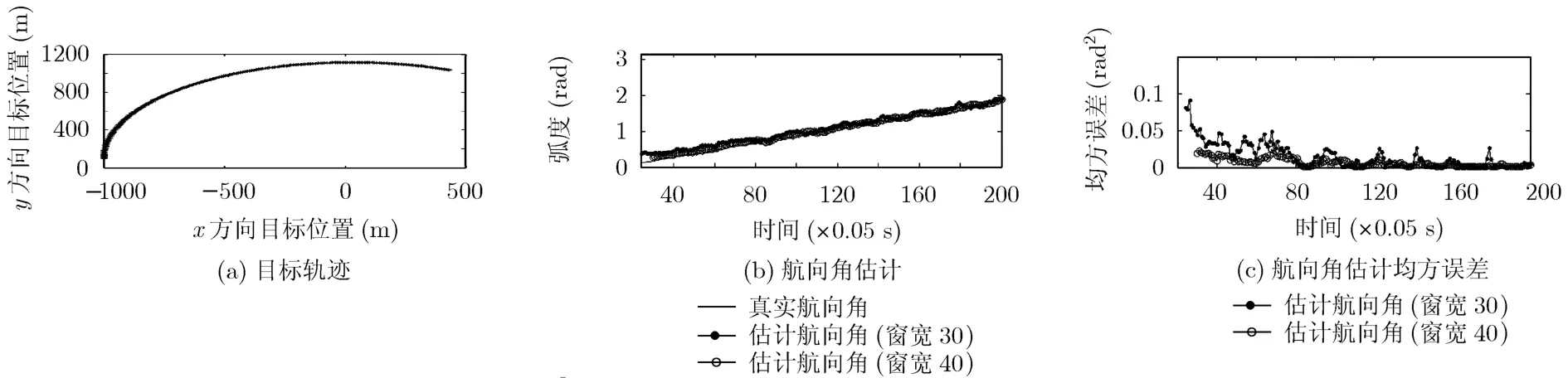
圖4 對勻速轉彎機動目標參數航跡濾波的仿真結果
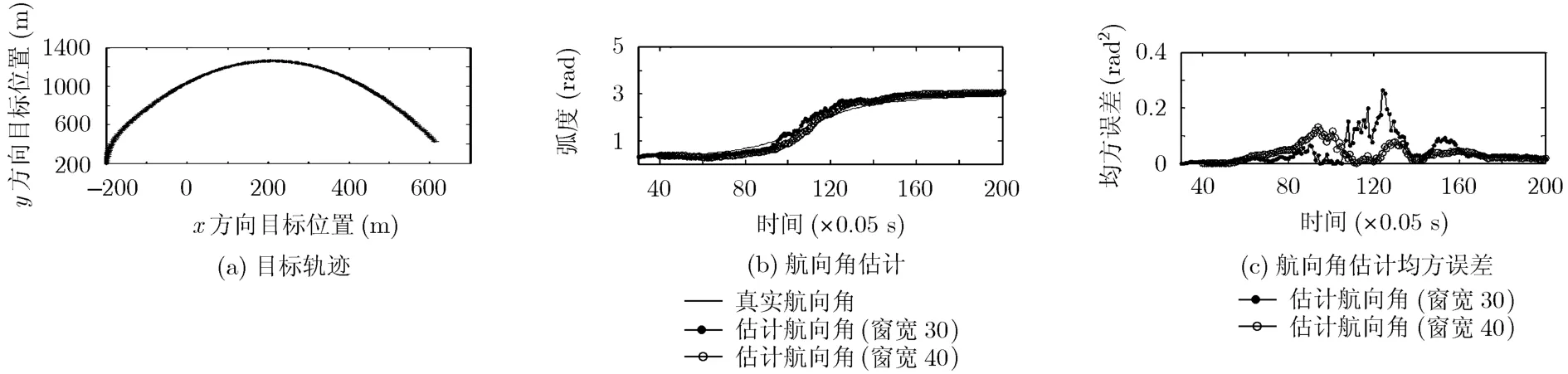
圖5 對分段變加速機動目標參數航跡濾波的仿真結果
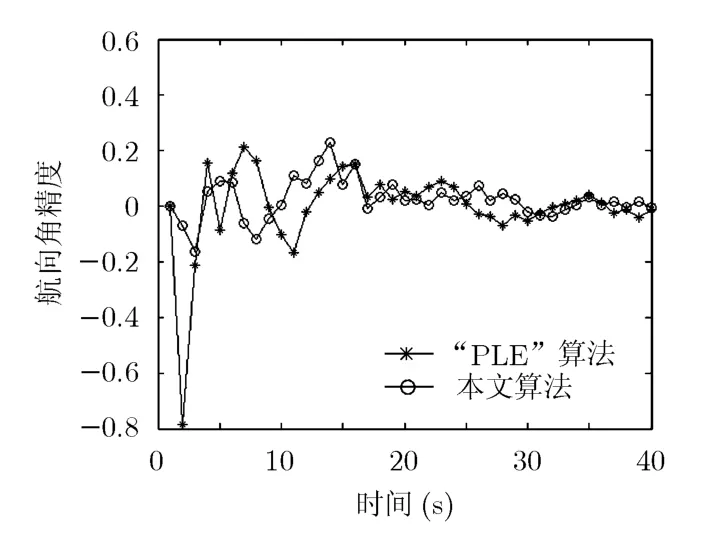
圖6 與PLE算法目標航向角精度比較
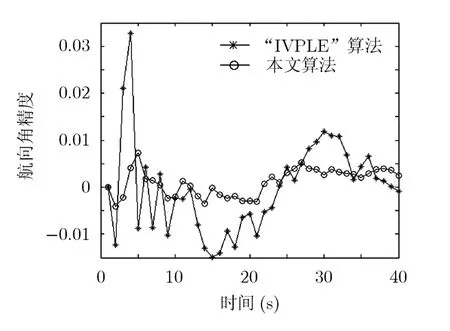
圖7 與IVPLE算法目標航向角精度比較
[1] Dogancay Kutluyil and Ibal Gokhan. Instrumental variable estimator for 3D bearing-only emitter localization[C].Proceedings of the 2nd International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Australia, Dec. 2005: 63-67.
[2] Dogancay K. Bias compensation for the bearings-only pseudo linear target track estimator[J]. IEEE Transactioins on Signal Processing, 2006, 54(1): 59-68.
[3] Bishop A N, Anderson B D O, Fidan B, Pathirana P N, and Mao Guo-qiang. Bearing-only localization using geometrically constrained optimization[J]. IEEE Transactioins on Aerospace and Electronic Systems, 2009,45(1): 308-320.
[4] Zhong Zhi-tong and Yang Xiu-ting. The applications of nonlinear Kalman filters in passive tracking with bearing-only measurements [J]. Technical Acoustics, 2008,27(6): 912-916.
[5] 洪少華, 史治國, 陳抗生. 用于純方位跟蹤的簡化粒子濾波算法及其硬件實現[J]. 電子與信息學報, 2009, 31(1): 96-100.Hong Shao-hua, Shi Zhi-guo, and Chen Kang-sheng.Simplified algorithm and hardware implementation for particle filter applied to bearings-only tracking [J]. Journal of Electronics & Information Technology, 2009, 31(1): 96-100.
[6] 劉進忙, 姬紅兵, 左濤. 純方位觀測的航跡不變量目標跟蹤方法[J]. 西安電子科技大學學報, 2008, 35(1): 49-53.Liu Jin-mang, Ji Hong-bing, and Zuo Tao. Trajectory invariable-information target tracking algorithm with bearing-only measurement [J]. Journal of Xidian University(Natural Science), 2008, 35(1): 49-53.
[7] 王鼎, 張莉, 吳瑛. 基于角度信息的結構總體最小二乘無源定位算法[J]. 中國科學, 2009, 39(6): 663-672.Wang Ding, Zhang Li, and Wu Ying. An algorithm of total least squares for passive location based angle information [J].Science in China, 2009, 39(6): 663-672.
[8] 劉忠, 周豐等. 純方位目標運動分析[M]. 北京: 國防工業出版社, 2009, 4: 29-52.Liu Zhong and Zhou Feng. An Analysis of Targets Motion Based Bearing-only [M]. Beijing: National Defense Industry Press, 2009, 4: 29-52.