多極化前向散射RCS分析及其對(duì)目標(biāo)分類識(shí)別的影響
2010-03-27 06:55:24李曉良
電子與信息學(xué)報(bào) 2010年9期
李曉良 胡 程 曾 濤
(北京理工大學(xué)信息與電子學(xué)院 北京 100081)
1 引言
2000年俄羅斯的Chapurskiy 首次提出了陰影逆合成孔徑理論(SISAR)[1],使得前向散射雷達(dá)的研究進(jìn)入了一個(gè)新的階段。SISAR理論表明運(yùn)動(dòng)目標(biāo)回波信號(hào)的頻譜函數(shù)與目標(biāo)近似輪廓函數(shù)的1維傅里葉變換存在一定的映射關(guān)系。目標(biāo)的邊緣輪廓函數(shù)不一樣,可以通過回波信號(hào)頻譜函數(shù)的微小差異反映出來,從而實(shí)現(xiàn)目標(biāo)的識(shí)別。文獻(xiàn)[1]給出了小觀測(cè)角度下MiG-21, MiG-26 及An-26 3種不同形狀飛機(jī)的前向散射雷達(dá)實(shí)驗(yàn)回波信號(hào)的頻譜密度函數(shù),其頻譜密度函數(shù)的形狀各異,與飛機(jī)的輪廓函數(shù)一一對(duì)應(yīng),第1次實(shí)驗(yàn)驗(yàn)證了SISAR理論用于目標(biāo)成像的正確性及目標(biāo)識(shí)別的潛力。2003年文獻(xiàn)[2]提出利用SISAR理論對(duì)地面運(yùn)動(dòng)目標(biāo)進(jìn)行分類識(shí)別,并以常規(guī)公路上的車輛作為實(shí)驗(yàn)?zāi)繕?biāo),通過大量的實(shí)驗(yàn)數(shù)據(jù)處理首次驗(yàn)證了非均勻環(huán)境中地面車輛檢測(cè)與分類識(shí)別的可行性;并獲得了較好的分類識(shí)別概率,表明了前向散射雷達(dá)在地面交通監(jiān)視方面的應(yīng)用潛力[3?6]。隨后,文獻(xiàn)[7-11]針對(duì)地面運(yùn)動(dòng)目標(biāo)模型考慮球面波、多徑效應(yīng)、觀測(cè)角度非線性變化及高階相位等因素的影響,建立了精確的地面運(yùn)動(dòng)目標(biāo)信號(hào)表示方法;并在最大似然理論框架下提出了穩(wěn)健的多參數(shù)聯(lián)合提取算法,獲得了高精度的目標(biāo)速度估計(jì)和穿越基線位置估計(jì),為高精度的地面運(yùn)動(dòng)目標(biāo)識(shí)別奠定了基礎(chǔ)。
上述方法都是在單極化條件下開展的,對(duì)一些形狀類似的目標(biāo)存在一定的誤分類和識(shí)別概率;而極化對(duì)目標(biāo)的形狀信息較為敏感,充分利用不同極化對(duì)目標(biāo)的散射信息的影響應(yīng)該可以較好地改善目標(biāo)分類識(shí)別概率;但是目前對(duì)多極化條件下前向散射雷達(dá)目標(biāo)分類識(shí)別的研究尚屬空白。隨著雷達(dá)極化理論體系不斷完善及極化測(cè)量技術(shù)的成熟,極化用于雷達(dá)目標(biāo)識(shí)別已成為新一代智能雷達(dá)系統(tǒng)研究領(lǐng)域中的一個(gè)熱點(diǎn)。本文首先介紹了SISAR基本原理和運(yùn)動(dòng)目標(biāo)的分類識(shí)別方法;然后建立了目標(biāo)前向散射RCS與目標(biāo)輪廓像譜信息之間的聯(lián)系,借助電磁仿真軟件CST,在多種極化條件下仿真目標(biāo)的RCS,仿真結(jié)果驗(yàn)證了多極化對(duì)前向散射雷達(dá)目標(biāo)分類識(shí)別的可行性,并且發(fā)現(xiàn)對(duì)于交通監(jiān)視感興趣的地面運(yùn)動(dòng)目標(biāo),垂直極化比水平極化更有利于前向散射情況下的目標(biāo)分類識(shí)別,若結(jié)合垂直極化和水平極化的前向散射RCS信息,可以進(jìn)一步提高對(duì)運(yùn)動(dòng)目標(biāo)的分類識(shí)別概率。
本文結(jié)構(gòu)安排如下:第2節(jié)分析了前向散射SISAR的基本原理;第3節(jié)介紹了基于SISAR的運(yùn)動(dòng)目標(biāo)分類識(shí)別方法;第4節(jié)給出了小衍射角情況下運(yùn)動(dòng)目標(biāo)全息信號(hào)的功率譜和目標(biāo)的RCS之間的關(guān)系,并利用CST軟件對(duì)多極化前向散射RCS進(jìn)行了計(jì)算,給出了相應(yīng)的計(jì)算結(jié)果;最后給出了全文的結(jié)論。
2 陰影逆合成孔徑雷達(dá)(SISAR)成像原理
圖1是運(yùn)動(dòng)目標(biāo)的幾何結(jié)構(gòu)圖。發(fā)射機(jī)置于坐標(biāo)系(x, y, z) 的原點(diǎn)O,接收機(jī)在y軸B(0,L,0)處。坐標(biāo)系(x', y', z') 與坐標(biāo)系(x, y, z) 各軸相互平行,原點(diǎn)(xp, yp, zp)為目標(biāo)的中心。目標(biāo)以速度v,平行于xy平面和y軸成φ角運(yùn)動(dòng)。發(fā)射機(jī)到目標(biāo)穿越基線位置的距離記為dT,接收機(jī)到目標(biāo)穿越基線位置的距離記為dR。前向散射雷達(dá)基線長(zhǎng)度L=dT+dR。Rt和Rr分別為目標(biāo)中心到發(fā)射機(jī)和接收對(duì)應(yīng)的斜距。
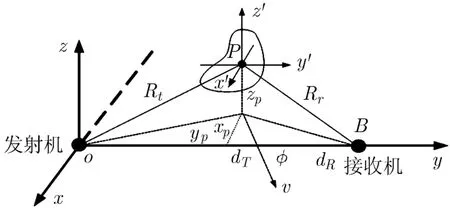
圖1 運(yùn)動(dòng)目標(biāo)幾何結(jié)構(gòu)圖
假設(shè)在觀測(cè)時(shí)間內(nèi)yp≈dT,運(yùn)動(dòng)目標(biāo)的全息信號(hào)可以表示為[1,11,12]

其中
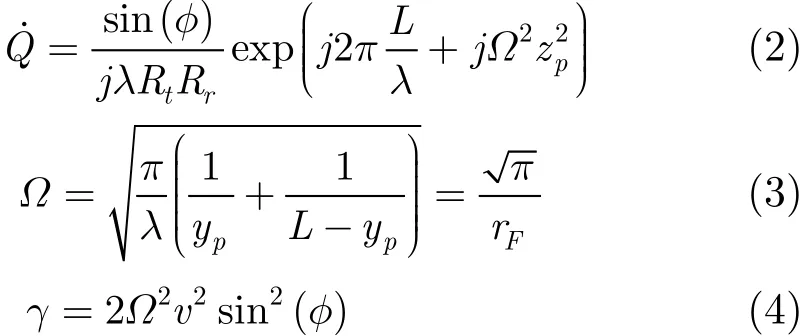
式(2)表示了目標(biāo)與雷達(dá)相對(duì)幾何關(guān)系對(duì)全息信號(hào)的影響。式(3)中λ為發(fā)射信號(hào)波長(zhǎng),?反比于菲涅爾區(qū)的半徑rF。γ為目標(biāo)幾何中心(xp,yp,zp)的多普勒頻率變化率。H˙(x')為目標(biāo)復(fù)剖面函數(shù),可表示如下:
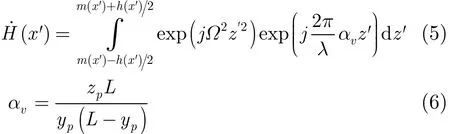
其中h(x')為目標(biāo)上邊界與下邊界的高度差函數(shù),m(x')為目標(biāo)的中線函數(shù)。當(dāng)?h << 1時(shí),可以忽略式(5)中的二次相位。對(duì)于地面運(yùn)動(dòng)目標(biāo)可近似認(rèn)為αv=0,此時(shí)|(x')|=h(x')。對(duì)運(yùn)動(dòng)目標(biāo)的全息信號(hào)式(1)進(jìn)行傅里葉變換可得[1]

為驗(yàn)證這一結(jié)論,文獻(xiàn)[13]分別對(duì)4種不同的車輛進(jìn)行了室外實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果表明不同形狀的運(yùn)動(dòng)目標(biāo)具有不同的功率譜曲線,特定輪廓的運(yùn)動(dòng)目標(biāo)具有特定的功率譜曲線,通過運(yùn)動(dòng)目標(biāo)的功率譜曲線可以進(jìn)行目標(biāo)的分類識(shí)別。另外,在文獻(xiàn)[2]中通過大量實(shí)驗(yàn)證明,僅利用功率譜曲線的旁瓣特征進(jìn)行目標(biāo)識(shí)別的正確性比包含主瓣時(shí)高。通過分析運(yùn)動(dòng)目標(biāo)前向散射功率譜曲線旁瓣的差異,提取特征矢量進(jìn)行運(yùn)動(dòng)目標(biāo)的識(shí)別是一種更為有效的運(yùn)動(dòng)目標(biāo)識(shí)別方法。
3 基于SISAR的運(yùn)動(dòng)目標(biāo)識(shí)別方法
雷達(dá)目標(biāo)識(shí)別的方法主要分為兩大類:第1類是基于特征矢量的目標(biāo)識(shí)別方法。第2類是基于成像的目標(biāo)識(shí)別方法。本文介紹方法屬于第1類,其基本原理是:利用雷達(dá)回波功率譜函數(shù)作為目標(biāo)特征矢量,提取各類目標(biāo)特征矢量之間的差異性進(jìn)行目標(biāo)分類。系統(tǒng)框圖如圖2所示,主要分為訓(xùn)練和測(cè)試兩部分。訓(xùn)練部分主要任務(wù)是由已知目標(biāo)的特征矢量建立類模型數(shù)據(jù)庫(kù),可采用如下方法實(shí)現(xiàn):(1)首先將已知目標(biāo)的前向散射波信號(hào)經(jīng)FFT變換到頻域。(2)然后將頻域信號(hào)輸入預(yù)處理器,在預(yù)處理器部分完成目標(biāo)運(yùn)動(dòng)速度歸一化和譜線長(zhǎng)度自動(dòng)截取等處理。(3)將預(yù)處理器輸出的信號(hào)進(jìn)行主分量分析(PCA),在保留原有特征信息的前提下,降低特征矢量維數(shù),將高維空間的問題轉(zhuǎn)化到低維空間去處理。(4)最后用所提取的已知目標(biāo)的特征矢量建立類模型數(shù)據(jù)庫(kù)。測(cè)試部分的主要任務(wù)是提取未知目標(biāo)的特征矢量與數(shù)據(jù)庫(kù)中的類模型進(jìn)行比較,依據(jù)各種決策規(guī)則判決未知目標(biāo)的類型。決策規(guī)則可使用:基于距離的最鄰近和K最鄰近法分類器、基于概率密度函數(shù)的Bayes分類器或神經(jīng)網(wǎng)絡(luò)分類器等。
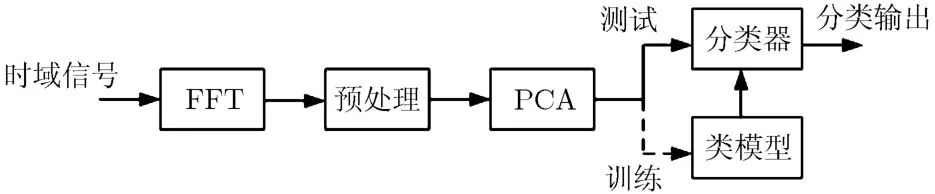
圖2 運(yùn)動(dòng)目標(biāo)識(shí)別系統(tǒng)框圖
文獻(xiàn)[13]利用917個(gè)汽車接收信號(hào)按照上述目標(biāo)識(shí)別方法,采用K最鄰近法分類器(K=4)進(jìn)行分類實(shí)驗(yàn)。其中300個(gè)信號(hào)用作訓(xùn)練數(shù)據(jù),617個(gè)用于實(shí)驗(yàn)測(cè)試,目的是將汽車分為小型、中型和大型3類。分類結(jié)果顯示,小型、中型和大型3類汽車分類的正確率分別為61.8%, 76.5%和63.3%;小型車和大型車之間的誤判率小于7%;小型車誤判為中型車的概率為35.3%;大型車誤判為中型車得概率為30%。實(shí)驗(yàn)結(jié)果表明, 采用上述方法可以獲得較好的分類結(jié)果, 但對(duì)于相鄰類型目標(biāo)的分類、識(shí)別誤差較大。為了進(jìn)一步提高目標(biāo)分類和識(shí)別的可靠性,本文進(jìn)行了多極化條件下前向散射雷達(dá)運(yùn)動(dòng)目標(biāo)識(shí)別的研究。
4 多極化前向散射雷達(dá)運(yùn)動(dòng)目標(biāo)RCS
在前向散射區(qū)域,目標(biāo)全息信號(hào)的功率譜函數(shù)與目標(biāo)的RCS有一一對(duì)應(yīng)的映射關(guān)系,通過目標(biāo)的RCS可以求得全息信號(hào)的功率譜。因此,通過對(duì)比分析目標(biāo)在不同極化情況下的RCS曲線,可以了解不同極化條件下目標(biāo)全息信號(hào)功率譜的差異,進(jìn)而可以得到多極化對(duì)前向散射雷達(dá)運(yùn)動(dòng)目標(biāo)識(shí)別的影響。
4.1 前向散射區(qū)域目標(biāo)RCS與全息信號(hào)功率譜函數(shù)的關(guān)系
在遠(yuǎn)場(chǎng)小衍射角區(qū)域,目標(biāo)的RCS可以表示為[14]

其中αv,αh分別代表衍射角垂直和水平分量。根據(jù)式(5),式(7)和式(8),可以推導(dǎo)得到運(yùn)動(dòng)目標(biāo)全息信號(hào)So(t)的功率譜函數(shù)|G˙S(ω)|2與目標(biāo)前向散射RCS存在如下對(duì)應(yīng)關(guān)系(詳細(xì)推導(dǎo)過程略):

由式(9)可知,當(dāng)利用SISAR方法計(jì)算功率譜時(shí),可以用計(jì)算目標(biāo)RCS的方法計(jì)算,然后按照αh→ω/(kv)的映射關(guān)系變換得到運(yùn)動(dòng)目標(biāo)全息信號(hào)的功率譜,因此全息信號(hào)功率譜的差異就體現(xiàn)在目標(biāo)RCS信息的差異上。利用目標(biāo)處于前向散射區(qū)域信號(hào)的功率譜對(duì)目標(biāo)進(jìn)行分類識(shí)別可以等效于用目標(biāo)處于前向散射區(qū)域的RCS信息差異來進(jìn)行目標(biāo)分類識(shí)別。
4.2 多極化與全息信號(hào)功率譜函數(shù)的關(guān)系
由于目標(biāo)RCS是受入射場(chǎng)和接收天線極化形式影響的。因此,根據(jù)全息信號(hào)功率譜函數(shù)和目標(biāo)前向散射RCS之間的對(duì)應(yīng)關(guān)系可知,全息信號(hào)也受入射場(chǎng)和接收天線極化形式的影響。
RCS與Sinclair散射矩陣元素之間的關(guān)系為

其中下標(biāo)i, j表示一組任意正交極化基。因此,不同極化條件下全息信號(hào)的功率譜函數(shù)可以表示為

根據(jù)式(11),我們認(rèn)為在不同極化條件下,全息信號(hào)的功率譜將會(huì)有差異。因此,在基于特征矢量的分類識(shí)別方法中,不同極化的引入和融合能夠增強(qiáng)對(duì)目標(biāo)的分類識(shí)別能力。
4.3 多極化條件下典型地面目標(biāo)的RCS仿真
本文將借助3D電磁仿真軟件CST,仿真多極化條件下目標(biāo)的RCS曲線,研究多極化對(duì)前向散射雷達(dá)運(yùn)動(dòng)目標(biāo)識(shí)別的影響。CST仿真目標(biāo)RCS的基本步驟如下:(1)把目標(biāo)建模為具有給定形狀、尺寸和材料的實(shí)心物體,入射功率源建模為具有特定頻率和極化的平面波或球面波。(2)利用理想邊界擬合技術(shù)和薄片技術(shù)對(duì)模型進(jìn)行網(wǎng)格劃分,采用時(shí)域有限積分法計(jì)算模型RCS。(3)產(chǎn)生RCS散射圖。
鑒于地面運(yùn)動(dòng)目標(biāo)識(shí)別和車輛交通監(jiān)視的應(yīng)用需求,下面將對(duì)貨車、3廂小車和卡車3種典型地面目標(biāo)的RCS進(jìn)行仿真。根據(jù)上述仿真步驟,首先對(duì)3種車型進(jìn)行建模,建模結(jié)果如圖3所示。“車1”,“車2”,“車3”分別代表貨車、3廂小車、卡車 3種不同類型的汽車,3個(gè)模型長(zhǎng)、寬、高的最大尺寸分別為4 m,2 m和1.6 m;圖中箭頭代表沿z軸方向傳播的頻率為 869 MHz的平面波。
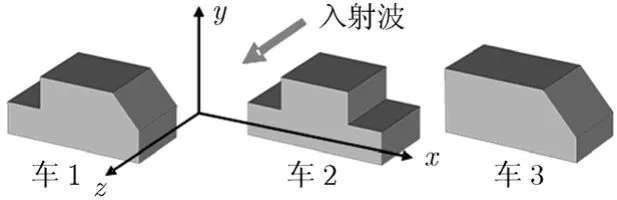
圖3 3種不同的汽車模型
由于任意極化形式的電磁波均可由水平極化波和垂直極化波表示,因此,本文僅對(duì)水平極化波和垂直極化波主極化場(chǎng)的RCS進(jìn)行仿真分析。車1模型在水平極化和垂直極化時(shí)RCS的3D仿真結(jié)果分別如圖4(a)和4(b) 所示,其中θ是直角坐標(biāo)系中的方位角,當(dāng)θ=0o時(shí),雙基地角β=180o;?為俯仰角。
由圖4(a)和4(b)可知,在不同極化條件下,同一個(gè)目標(biāo)的前向散射RCS最大值和主瓣寬度幾乎相同,因此這兩個(gè)參數(shù)不能直接用于目標(biāo)的分類識(shí)別。但是,我們可以明顯的看出不同極化條件下目標(biāo)前向散射RCS的旁瓣是不同的,對(duì)目標(biāo)的形狀非常敏感,這種由多極化信息帶來的目標(biāo)RCS旁瓣差異可以用于對(duì)目標(biāo)的分類識(shí)別。
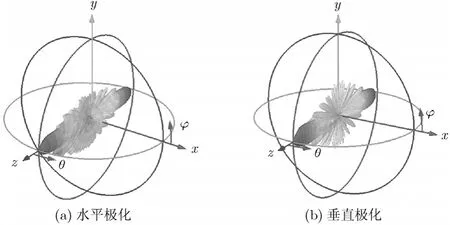
圖4 車1模型在極化時(shí)RCS的3D仿真結(jié)果
為了更清楚地顯示不同極化條件下目標(biāo)前向散射RCS旁瓣的差異,本文對(duì)3種模型的前向散射RCS截取水平切片圖,如圖5所示。
圖5(a),5(b)和5(c) 分別是車1,車2,車3在水平極化(HH) 和垂直極化(VV) 條件下歸一化的RCS散射圖的水平切片。從以上3幅圖中清楚的看到:車1在水平極化和垂直極化條件下RCS曲線的旁瓣有明顯的差異;同樣車2和車3在兩種不同極化條件下的RCS曲線的旁瓣也有明顯的不同。由式(9)可知,目標(biāo)全息信號(hào)功率譜函數(shù)的差異就體現(xiàn)在目標(biāo)RCS信息的差異上,因此,由3種模型RCS曲線的旁瓣在兩種極化條件下的差異,可以得到兩種極化條件下模型全息信號(hào)功率譜曲線的旁瓣差異,利用這個(gè)差異依據(jù)第3節(jié)所述的目標(biāo)分類識(shí)別方法就可以實(shí)現(xiàn)目標(biāo)的分類與識(shí)別。
圖6(a) 是水平極化條件下車1,車2,車3在xz平面上的歸一化的RCS曲線,圖6(b)是水平極化條件下車1,車2,車3在xz平面上的歸一化的全息信號(hào)功率譜曲線,圖6(c)是垂直極化條件下車1,車2,車3在xz平面上的歸一化的RCS曲線,圖6(d)是垂直極化條件下車1,車2,車3在xz平面上的歸一化的全息信號(hào)功率譜曲線。其中,圖6(b)和圖6(d)是由CST仿真得到的RCS數(shù)據(jù),根據(jù)式(9),在入射波頻率為869 MHz,車速為10 m/s的情況下?lián)Q算得到的。通過對(duì)比圖6(a),6(c)和圖6(b),6(d)可以發(fā)現(xiàn),目標(biāo)全息信號(hào)功率譜的差異就體現(xiàn)在目標(biāo)RCS信息的差異上。利用目標(biāo)處于前向散射區(qū)域信號(hào)的功率譜函數(shù)對(duì)目標(biāo)進(jìn)行分類識(shí)別可以等效于用目標(biāo)處于前向散射區(qū)域的RCS信息差異來進(jìn)行目標(biāo)分類識(shí)別,實(shí)驗(yàn)結(jié)果與理論分析一致。
進(jìn)一步分析仿真結(jié)果,可以看到:車1,車2,車3 3種模型在水平極化下RCS旁瓣的差異和在垂直極化下RCS旁瓣的差異是不同的。圖6(a)中在水平極化條件下車1和車2的RCS旁瓣信息非常接近,因此車1和車2進(jìn)行分類識(shí)別時(shí)其發(fā)生誤識(shí)別的概率就會(huì)明顯增加;但是在圖6(c)中,垂直極化條件下車1和車2 RCS的旁瓣信息具有較大的差別,可以很好地對(duì)目標(biāo)進(jìn)行分類與識(shí)別;而車3無論是在水平極化還是在垂直極化下,RCS旁瓣信息都與車1和車2有較大的差異,可以很好地與車1和車2進(jìn)行分類識(shí)別。因此如果聯(lián)合水平極化和垂直極化對(duì)車1和車2前向散射RCS旁瓣信息的差異,利用圖2中的分類識(shí)別方法,則可以大大的提高對(duì)目標(biāo)的分類識(shí)別概率。由圖3也可知,對(duì)于地面運(yùn)動(dòng)的目標(biāo)類型,大部分情況其水平方向的尺寸要比垂直方向的尺寸大一倍以上,因此水平方向目標(biāo)形狀的相對(duì)變化較垂直方向的相對(duì)變化要小,目標(biāo)RCS信息在水平極化下的差異比在垂直極化條件下的差異要小;所以對(duì)于進(jìn)行交通監(jiān)視的地面運(yùn)動(dòng)目標(biāo)類型,垂直極化條件更容易發(fā)現(xiàn)不同目標(biāo)的差異,更有利于對(duì)這類目標(biāo)進(jìn)行分類識(shí)別。
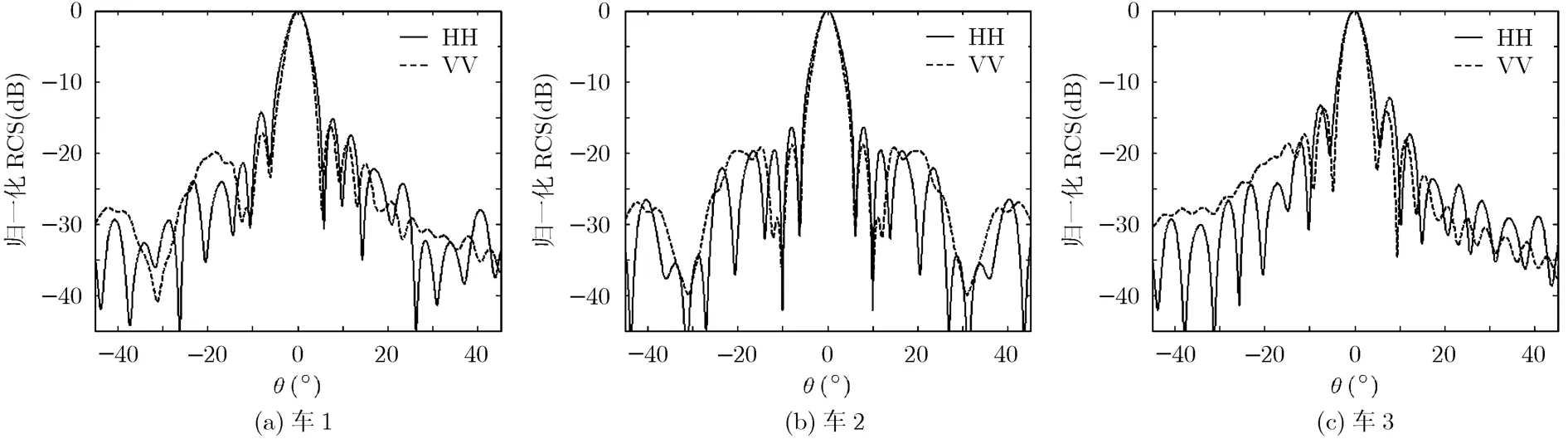
圖5 RCS水平面切片圖
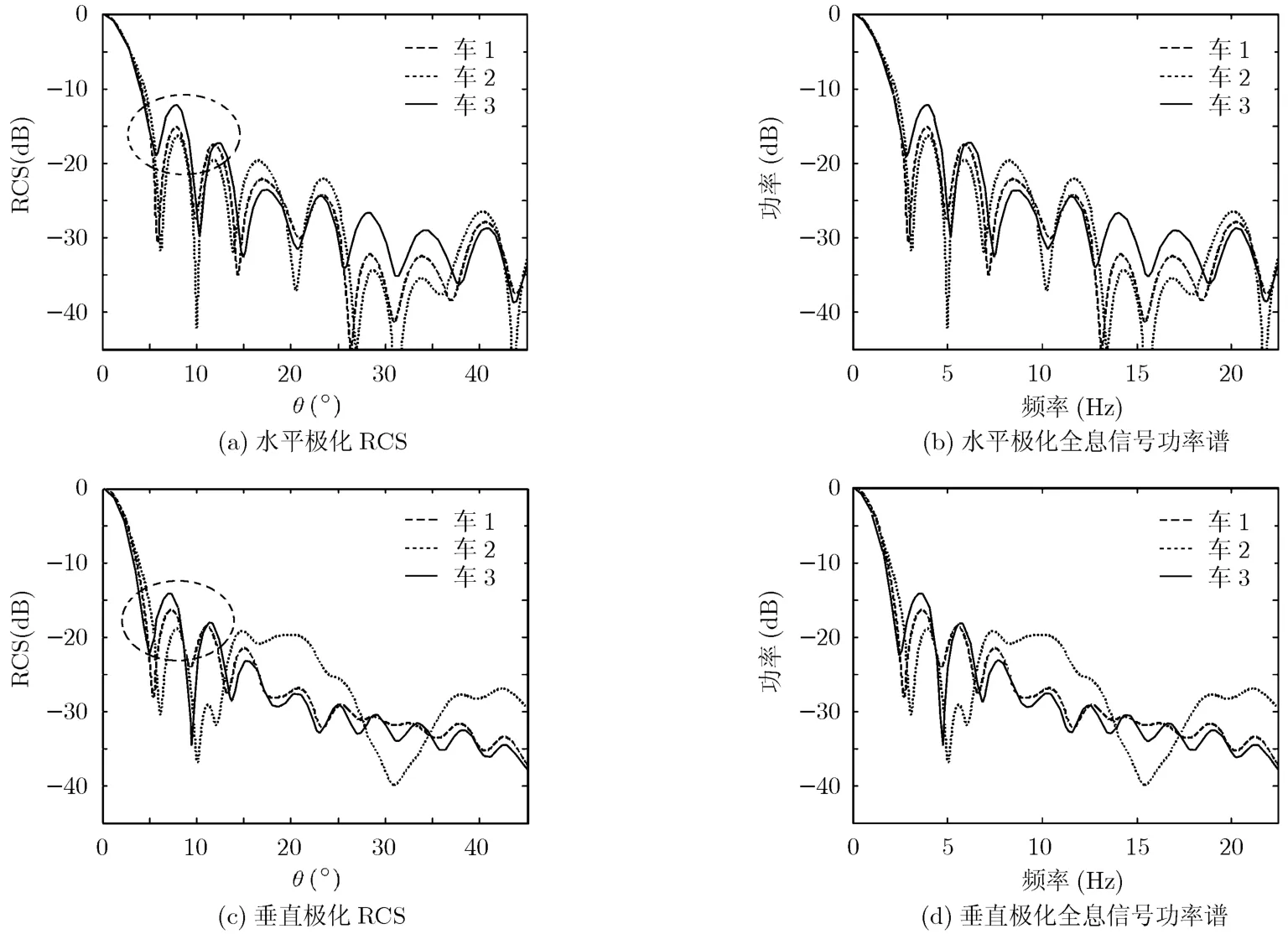
圖6 極化條件下歸一化的RCS曲線和全息信號(hào)功率譜曲線
5 結(jié)束語(yǔ)
本文借助電磁仿真軟件CST首次仿真了3種不同的車輛模型在不同極化條件下的前向散射RCS。通過對(duì)比不同極化條件下同一個(gè)目標(biāo)的前向散射RCS曲線旁瓣,發(fā)現(xiàn)同一個(gè)目標(biāo)在不同極化情況下具有不同的前向散射RCS曲線;并且在垂直極化和水平極化下3種模型前向散射RCS曲線的旁瓣差異較大。分析得到對(duì)于交通監(jiān)視的地面運(yùn)動(dòng)目標(biāo),垂直極化較水平極化更容易進(jìn)行目標(biāo)的分類與識(shí)別;并且聯(lián)合水平極化和垂直極化的前向散射RCS旁瓣差異信息可以進(jìn)一步提高對(duì)目標(biāo)的分類識(shí)別概率,仿真得到的RCS散射圖也驗(yàn)證了上述結(jié)論的正確性。綜合以上分析可以得出結(jié)論,在多極化條件下,利用目標(biāo)的前向散射RCS曲線的旁瓣差異可以獲得更多關(guān)于目標(biāo)輪廓的特征信息,增加前向散射雷達(dá)運(yùn)動(dòng)目標(biāo)識(shí)別的可靠性。
[1] Chapurskiy V V and Sablin V N. SISAR: Shadow Inverse Synthetic Aperture Radiolocation. The Record of the IEEE 2000 International Radar Conference, Alexandria, Virginia,2000: 322-328.
[2] Abdullah R S A R and Cherniakov M. Forward scattering radar for vehicles classification. Vehcom Int’1 Conf.,VehCom2003, Birmingham, UK, 2003: 73-78.
[3] Cherniakov M, Abdullah R S A R, and Jancovic P, et al..Automatic ground target classification using forward scattering radar. IEE Proceedings: Radar, Sonar and Navigation, 2006, 153(5): 427-437.
[4] Cherniakov M, Abdullah R S A R, and Jancovic P, et al..Forward scattering micro sensor for vehicle classification.IEEE International Radar Conference, Arlington, Virginia,2005: 184-189.
[5] Cherniakov M, Salous M, and Abdullah R S A R, et al..Forward scattering radar for ground targets detection and recognition. 2nd EMRS DTC Technical Conference,Edinburgh, 2005: A14-A19.
[6] Sizov V, Hu Cheng, and Antoniou M, et al.. Vegetation clutter spectral properties in vhf/uhf bistatic doppler radar.IEEE Radar Conf 2008. Rome Italy, 2008: 1466-1471.
[7] Zeng Hai-bin, Hu Cheng, and Li Tao. The signal to noise ratio analysis of ground forward scattering radar. IET Radar Conf 2009, Guilin, 2009: 1-4.
[8] Long Teng, Hu Cheng, and Cherniakov M. Ground moving target signal model and power calculation in forward scattering micro radar. Science in China Series F:Information Sciences, 2009, 52(9): doi: 10.1007/s11432-009-0154-1.
[9] Hu Cheng, Antoniou M, and Cherniakov M, et al.. Quasioptimal signal processing in ground forward scattering radar.IEEE Radar Conf 2008. Rome Italy, 2008: 2044-2049.
[10] Hu Cheng, Long Teng, and Cherniakov M, et al.. Forward scattering micro radars for situation awareness. APSAR Conference, Xi’an China, Oct. 26-29, 2009.
[11] 胡程. 短基線前向散射雷達(dá)系統(tǒng)理論與信號(hào)處理方法研究.[博士論文], 北京理工大學(xué), 2009.Hu Cheng. Research on system theory and signal processing method in short baseline forward scattering radar. [Ph.D.dissertation], Beijing Institute of Technology, 2009.
[12] 羅斌鳳, 張冠杰, 張守宏. SISAR中運(yùn)動(dòng)目標(biāo)全息信號(hào)的表示及仿真研究[J]. 電子與信息學(xué)報(bào), 2003, 25(10): 1316-1320.Luo Bin-feng, Zhang Guan-jie, and Zhang Shou-hong. The expression and simulation of radio holographic signal for the moving object in SISAR [J]. Journal of Electronics and Information Technology, 2003, 25(10): 1316-1320.
[13] Abdullah R S A R. Forward scattering radar for vehicle classification. [Ph.D. dissertation]. The University of Birmingham, 2005.
[14] Glaser J I. Bistatic RCS of complex objects near forward scatter. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES-21(1): 70-78.
猜你喜歡
音樂探索(2022年2期)2022-05-30 21:01:37
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2019年8期)2019-08-27 02:23:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年4期)2019-05-20 10:06:32
小學(xué)科學(xué)(學(xué)生版)(2018年7期)2018-08-13 09:33:04
電子制作(2018年11期)2018-08-04 03:25:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(jí)(2017年9期)2017-10-13 22:27:46