導(dǎo)管架式海洋平臺(tái)的MRFD半主動(dòng)模糊控制理論研究
2010-01-22 03:37:32霍發(fā)力曲鵬翔
中國(guó)海洋平臺(tái) 2010年2期
霍發(fā)力, 曲鵬翔
(1.上海振華重工股份有限公司,上海200125;2.江蘇科技大學(xué),鎮(zhèn)江212003)
導(dǎo)管架式海洋平臺(tái)的MRFD半主動(dòng)模糊控制理論研究
霍發(fā)力1, 曲鵬翔2
(1.上海振華重工股份有限公司,上海200125;2.江蘇科技大學(xué),鎮(zhèn)江212003)
基于模糊理論控制采用磁流變阻尼器(MRFD)對(duì)海洋平臺(tái)在規(guī)則波和隨機(jī)波浪載荷、線性波和Stokes5節(jié)波作用下的振動(dòng)控制效果進(jìn)行研究。以平臺(tái)的位移、速度響應(yīng)為輸入量,給出最優(yōu)控制力的計(jì)算方法,并運(yùn)用Morison方程實(shí)現(xiàn)了波浪力的數(shù)值仿真。以平臺(tái)結(jié)構(gòu)振動(dòng)響應(yīng)幅度為控制目標(biāo),設(shè)計(jì)MRFD系統(tǒng),實(shí)現(xiàn)對(duì)海洋平臺(tái)的最優(yōu)控制。基于MATLAB調(diào)用ANSYS軟件,開發(fā)平臺(tái)振動(dòng)控制界面,以典型導(dǎo)管架平臺(tái)為例,進(jìn)行多自由度數(shù)值仿真。仿真結(jié)果表明模糊控制下MRFD的半主動(dòng)控制系統(tǒng)對(duì)海洋平臺(tái)的動(dòng)力響應(yīng)有明顯的控制效果。
海洋平臺(tái);模糊控制理論;磁流變阻尼器;半主動(dòng)控制
0 前言
隨著陸上建筑結(jié)構(gòu)振動(dòng)控制技術(shù)研究與應(yīng)用不斷成熟,海洋平臺(tái)結(jié)構(gòu)的振動(dòng)控制技術(shù)已引起國(guó)內(nèi)外學(xué)術(shù)界和工程界的重視,特別是磁流變、電流變阻尼器等新型控制器的研究與應(yīng)用[1~3],為海洋平臺(tái)的振動(dòng)控制研究提供了更大的空間。歐進(jìn)萍、楊飏等對(duì)海洋平臺(tái)的冰、地震載荷振動(dòng)控制進(jìn)行了研究[4~6];李華軍等對(duì)海洋平臺(tái)波浪載荷的半主動(dòng)振動(dòng)控制進(jìn)行了研究[7,8]。
在對(duì)海洋平臺(tái)的數(shù)值模擬時(shí),大多文獻(xiàn)采用單自由度進(jìn)行研究。把海洋平臺(tái)簡(jiǎn)化為單自由度計(jì)算簡(jiǎn)單方便,但是仿真結(jié)果存在一定的誤差。本文運(yùn)用ANSYS有限元軟件,以典型導(dǎo)管架平臺(tái)為例,進(jìn)行多自由度數(shù)值仿真。采用模糊控制理論研究海洋平臺(tái)在規(guī)則波和隨機(jī)波浪、線性波和Stokes5節(jié)波載荷下的磁流變阻尼器(MRFD)半主動(dòng)振動(dòng)控制理論,并通過一算例數(shù)值仿真了半主動(dòng)MRFD對(duì)海洋平臺(tái)的模糊控制效果。運(yùn)用Matlab,開發(fā)了海洋平臺(tái)半主動(dòng)控制界面,更好地實(shí)現(xiàn)了海洋平臺(tái)半主動(dòng)控制。
1 導(dǎo)管架海洋平臺(tái)結(jié)構(gòu)的動(dòng)力模型
1.1 海洋平臺(tái)振動(dòng)控制方程
帶有MRFD的海洋平臺(tái)運(yùn)動(dòng)方程表示如下:

式中:X(t)=[x1,x2,…,xn]T是一n維位移向量;X¨(t)和X˙(t)分別表示對(duì)應(yīng)的速度和加速度向量;M、C和K分別是質(zhì)量、阻尼和剛度矩陣;F(t)表示外界載荷矩陣;D是外界載荷作用的位置矩陣;H表示磁流變阻尼器的位置矩陣;U(t)是磁流變阻尼器提供的控制力矩陣。其對(duì)應(yīng)的狀態(tài)空間方程為

式中Z(t)是2n維狀態(tài)向量,式中各矩陣定義如下:

1.2 波浪載荷數(shù)值模擬[9]
運(yùn)用Morison方程在時(shí)域內(nèi)進(jìn)行仿真波浪力。作用在海洋平臺(tái)樁腿上的波浪力可表示為

式中:CD為拖曳力系數(shù);CM為質(zhì)量系柱體直徑;ρ為海水密度;d為水深;z為積分變量;u(z,t)和˙u(z,t)分別為波浪水質(zhì)點(diǎn)的水平速度和加速度。其中,u(z,t)和˙u(z,t)分別根據(jù)線性波浪理論和Stokes5節(jié)波理論分別求解,即可求出響應(yīng)的隨機(jī)波浪載荷和規(guī)則波浪載荷大小[9]。
2 模糊控制理論
2.1 模糊控制系統(tǒng)參量及參量的模糊化
本文采用二維模糊控制器(見圖1),二維模糊控制器的兩個(gè)輸入基本上都選用受控變量及其給定值的偏差E和偏差變化EC。由于它能夠較嚴(yán)格地反映受控系統(tǒng)中輸出變量的動(dòng)態(tài)特性,因此在控制效果上要比一維模糊控制器好得多。
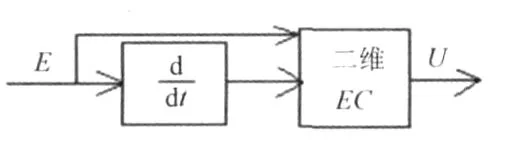
圖1 二維模糊控制器
對(duì)于應(yīng)用于海洋平臺(tái)的振動(dòng)控制,模糊控制器的輸入變量選取海洋平臺(tái)的位移響應(yīng)誤差e(i)=rx(i)和誤差變量ec(i)=e(i-1)-e(i),x為位移響應(yīng),r為參考輸入,在振動(dòng)控制中r=0,而輸出變量選取模糊控制器的最優(yōu)控制力。
2.2 建立模糊數(shù)模型[2]
為設(shè)計(jì)一個(gè)優(yōu)良的模糊控制器,其關(guān)鍵是要有一個(gè)便于靈活調(diào)整的模糊控制規(guī)則。基于解析表達(dá)式的模糊數(shù)模型就具有這一規(guī)則。
雙輸入單輸出模糊控制器所涉及的3個(gè)語言變量是:誤差E、誤差變化EC和控制量的變化U,即對(duì)應(yīng)海洋平臺(tái)的位移、速度和MRFD的控制力。本文采用的論域?yàn)閇-3,3],通過響應(yīng)的量化因子對(duì)論域進(jìn)行模糊分割,3個(gè)語言變量被分割為7個(gè)模糊子集,它們分別為:{NBN M N S O PSPMPB}={-3,-2,-1,0,1,2,3}。
模糊數(shù)模型的結(jié)構(gòu)可采用下列解析式來表達(dá):

式中<·>表示四舍五入取整運(yùn)算。
為使控制規(guī)則的修改更加靈活,滿足系統(tǒng)在不同狀態(tài)下對(duì)修正因子的不同要求,可在式(4)描述的模糊數(shù)模型中引入兩個(gè)或兩個(gè)以上的修正因子。
帶4個(gè)修正因子的解析式可表示為
式中:αi,i=1,2,3,4∈[0,1]為修正因子,采用ITAE積分性能指標(biāo)對(duì)多個(gè)修正因子尋優(yōu)。
由于式(4)和式(5)的模糊量化取整運(yùn)算,只有當(dāng)E和EC恰好都是模糊數(shù)時(shí)才能準(zhǔn)確地反映模糊控制規(guī)則。而在其他情況下只能近似地反映模糊控制規(guī)則,因此很不準(zhǔn)確。由于量化誤差的存在,不僅使模糊控制器的輸出不能準(zhǔn)確地反映控制規(guī)則,而且會(huì)造成調(diào)節(jié)死區(qū),并在穩(wěn)態(tài)階段,使系統(tǒng)產(chǎn)生穩(wěn)態(tài)誤差,甚至產(chǎn)生穩(wěn)態(tài)顫震現(xiàn)象。為了克服穩(wěn)態(tài)性能差的缺點(diǎn)又不增加模糊控制器的復(fù)雜程度,宜采用泰勒二元函數(shù)在線插值模糊控制系統(tǒng)。
3 磁流變阻尼器
磁流變阻尼器具有能耗低、出力大、響應(yīng)速度快、結(jié)構(gòu)簡(jiǎn)單、阻尼力連續(xù)順逆可調(diào)及可方便地與微機(jī)控制結(jié)合等優(yōu)點(diǎn),已經(jīng)成為土木工程結(jié)構(gòu)新一代高性能、智能化的減振裝置,并已經(jīng)在土木工程結(jié)構(gòu)振動(dòng)控制方面取得了初步的應(yīng)用。
3.1 磁流變阻尼器力學(xué)模型
本文采用剪切閥式MRFD進(jìn)行分析,根據(jù)Bing-ham流體在窄縫中流動(dòng)的壓力梯度方程,得到磁流變阻尼器力學(xué)分析模型[10]:

式中:L為導(dǎo)磁區(qū)長(zhǎng)度;h為阻尼通道高度;D為缸體內(nèi)徑;d為活塞直徑;v(t)為活塞與缸體間的相對(duì)速度;sgn為符號(hào)函數(shù);τy為阻尼液的剪切屈服強(qiáng)度;η為阻尼液的表觀黏度;cd為黏滯阻尼力系數(shù);fdy為可調(diào)庫(kù)侖阻尼力。
由阻尼力公式可知,阻尼力分為黏滯阻尼力和可調(diào)庫(kù)侖阻尼力兩種。其中庫(kù)侖阻尼力可通過改變輸入電流按需要調(diào)節(jié)。
3.2 半主動(dòng)控制算法
本文采用簡(jiǎn)單的Bang-Bang磁流變阻尼控制算法,其可表示為

式中:x=xd是磁流變液阻尼器的相對(duì)位移。該控制算法表明,當(dāng)磁流變液阻尼器所在位置,如結(jié)構(gòu)層間背離平衡點(diǎn)振動(dòng)時(shí),需施加阻尼器能實(shí)現(xiàn)的最大阻尼力,否則,施加最小阻尼力。
4 算例
墨西哥灣某典型導(dǎo)管架海洋平臺(tái)總質(zhì)量為15 570 000 kg,上層建筑簡(jiǎn)化為八個(gè)集中載荷作用在頂層,水深125 m,等效高度160 m,樁腿直徑2.2 m。本文以該平臺(tái)為例,進(jìn)行數(shù)值模擬。并運(yùn)用ANSYS有限元軟件建模,平臺(tái)模型如圖2所示。
磁流變阻尼器安裝位置為第一、五層(自上而下)對(duì)角主樁腿上,如圖2所示。
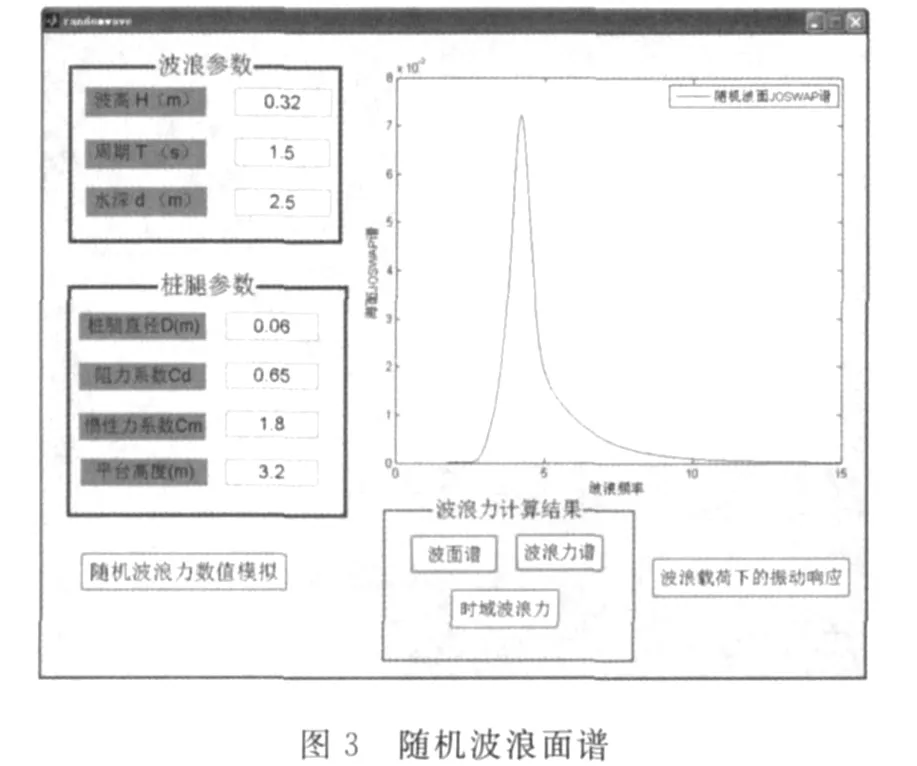
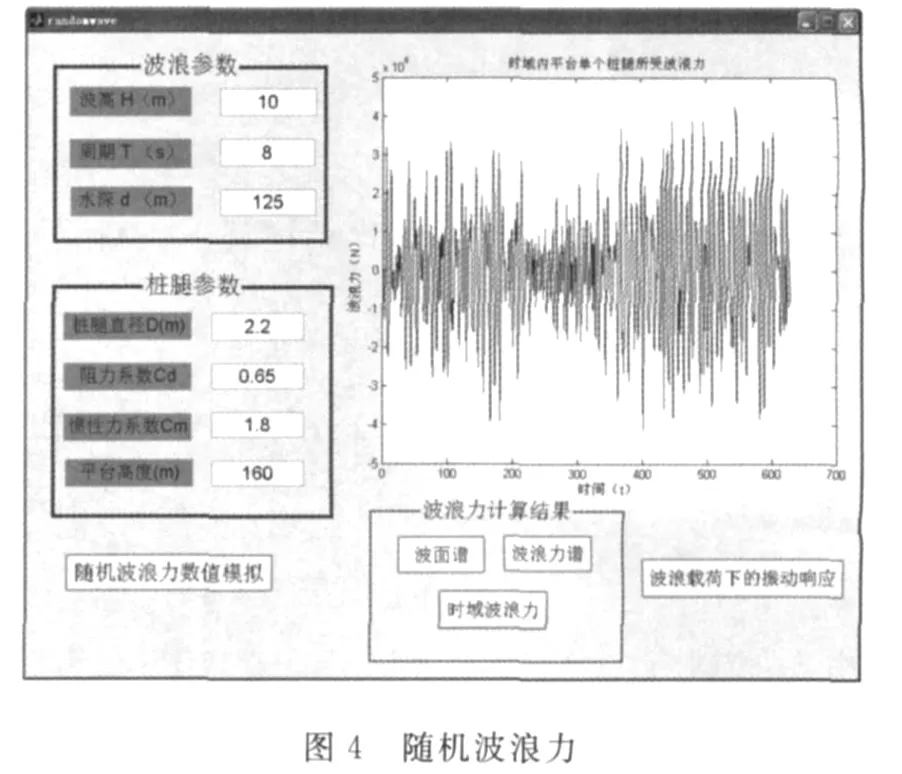
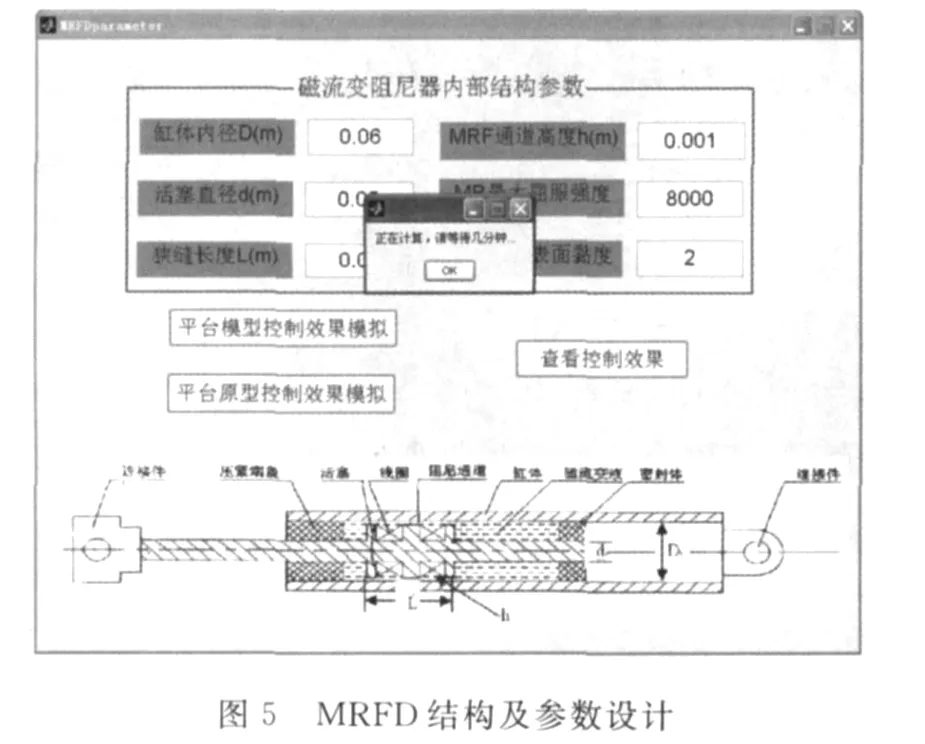
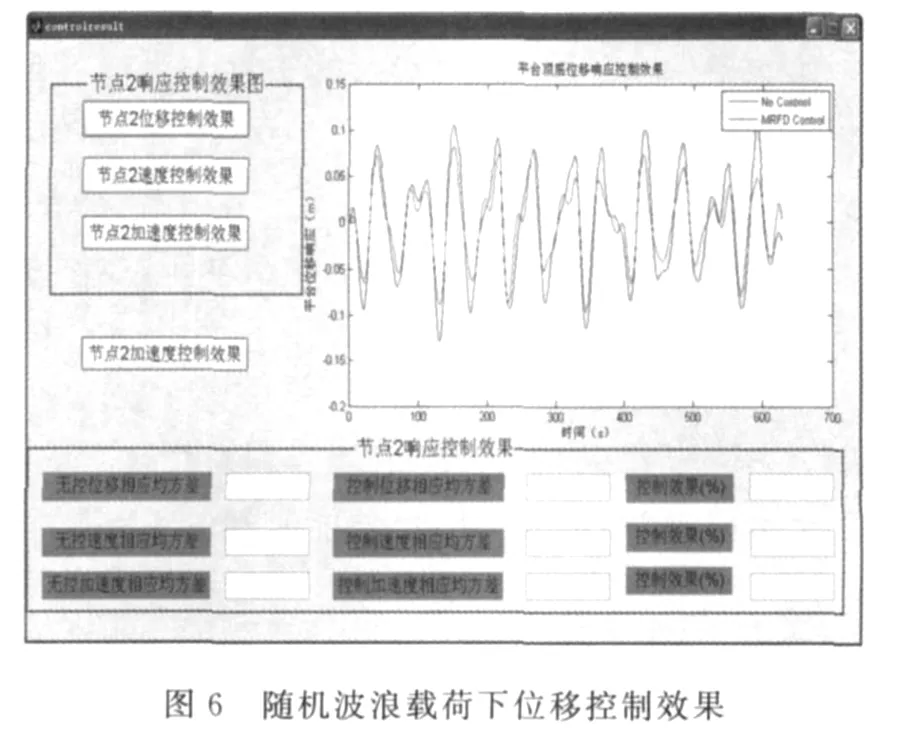
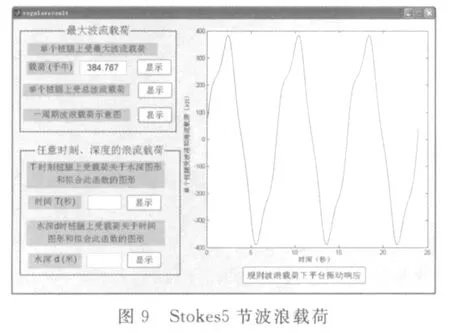
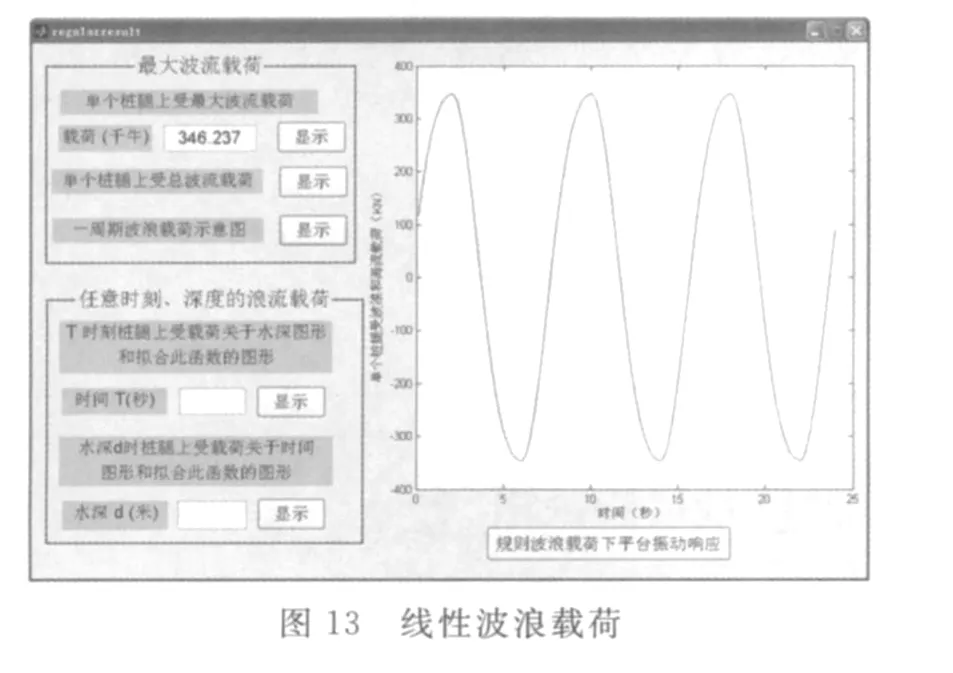
根據(jù)線形波浪理論進(jìn)行分析,運(yùn)用JONSWAP譜描述墨西哥灣某惡劣海況:有效波高10 m,周期為8 s。采用Morison方程,計(jì)算得到作用在海洋平臺(tái)上隨機(jī)波浪力(如圖3~圖4所示),并計(jì)算出在同等工況下規(guī)則波波浪力。運(yùn)用ANSYS應(yīng)用軟件建立海洋平臺(tái)模型,并計(jì)算出波浪力加載在海洋平臺(tái)的X方向情況下,海洋平臺(tái)的運(yùn)動(dòng)響應(yīng)(位移、速度、加速度),以及在MRFD作用下的運(yùn)動(dòng)響應(yīng)。MRFD結(jié)構(gòu)及參數(shù)設(shè)計(jì)如圖5所示。圖6~圖8所示為海洋平臺(tái)頂層上NO.2節(jié)點(diǎn)的隨機(jī)波浪載荷下運(yùn)動(dòng)響應(yīng)及控制效果;MRFD半主動(dòng)控制下,圖9~圖12為規(guī)則波中Stokes5節(jié)波作用下的響應(yīng)及控制效果;圖13~圖16為規(guī)則波中線性波浪載荷的振動(dòng)響應(yīng)及控制效果。根據(jù)數(shù)值模擬效果可知:規(guī)則波浪載荷作用下控制效果明顯好于隨機(jī)波浪的控制效果,線性波載荷的控制效果好于Stokes5節(jié)波的控制效果。隨機(jī)波浪的控制效果接近30%,規(guī)則波的控制效果接近40%;對(duì)速度、位移和加速度響應(yīng)的控制效果中,加速度控制效果最好,位移控制效果次之,速度控制效果較差。
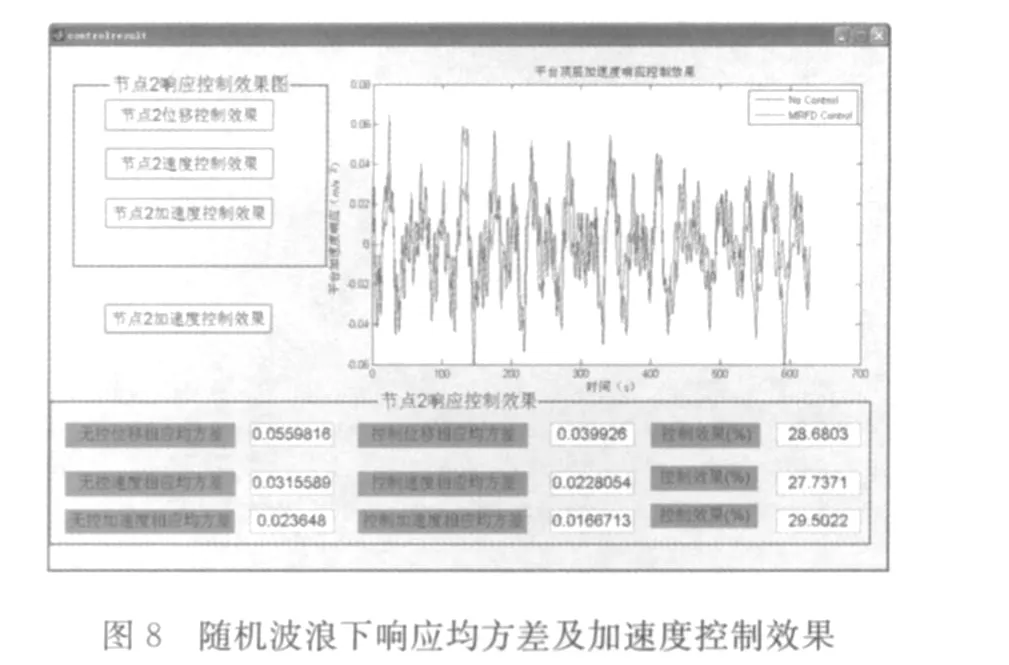
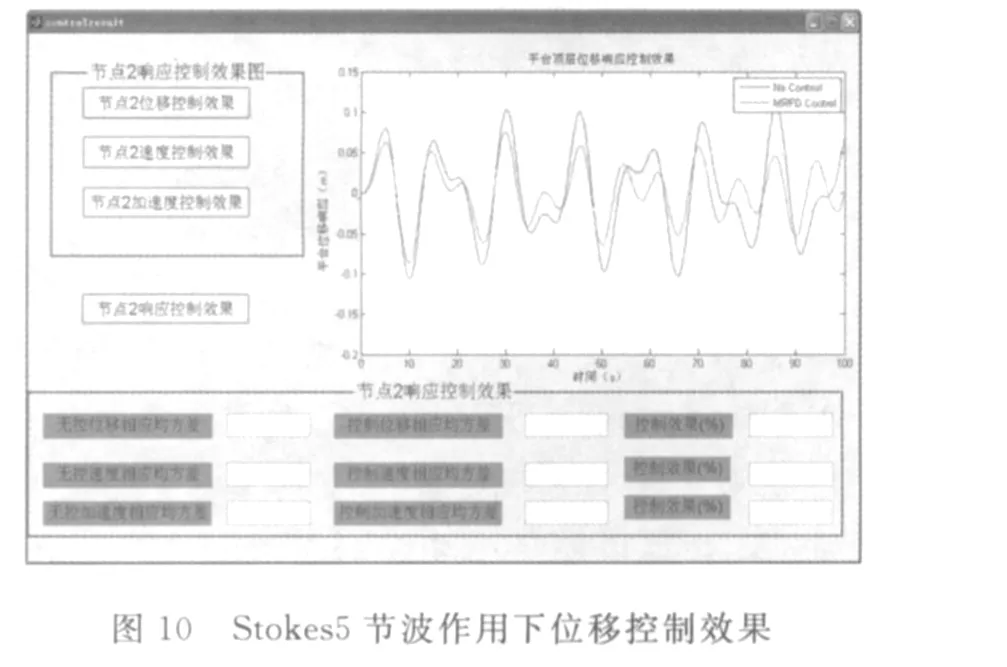
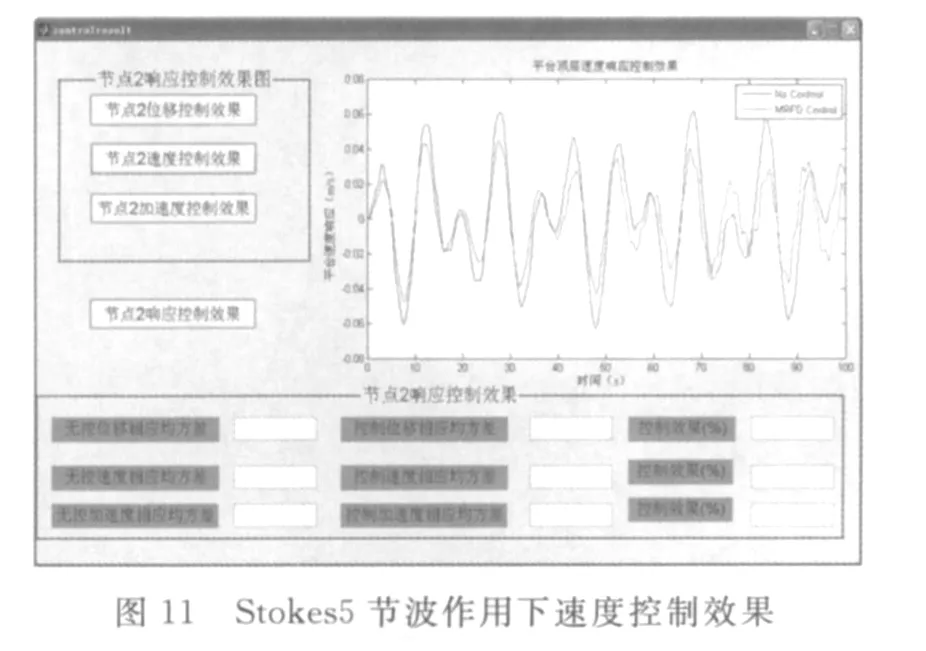
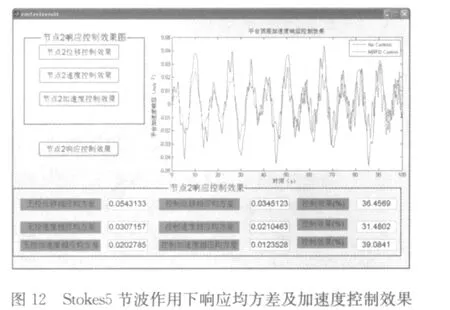
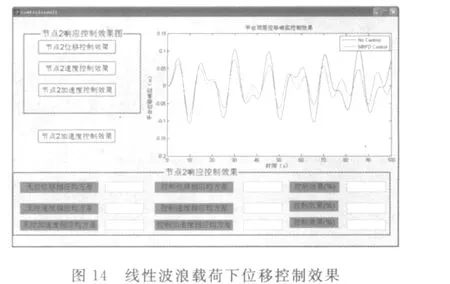
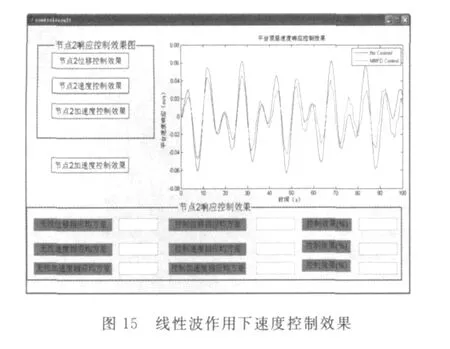
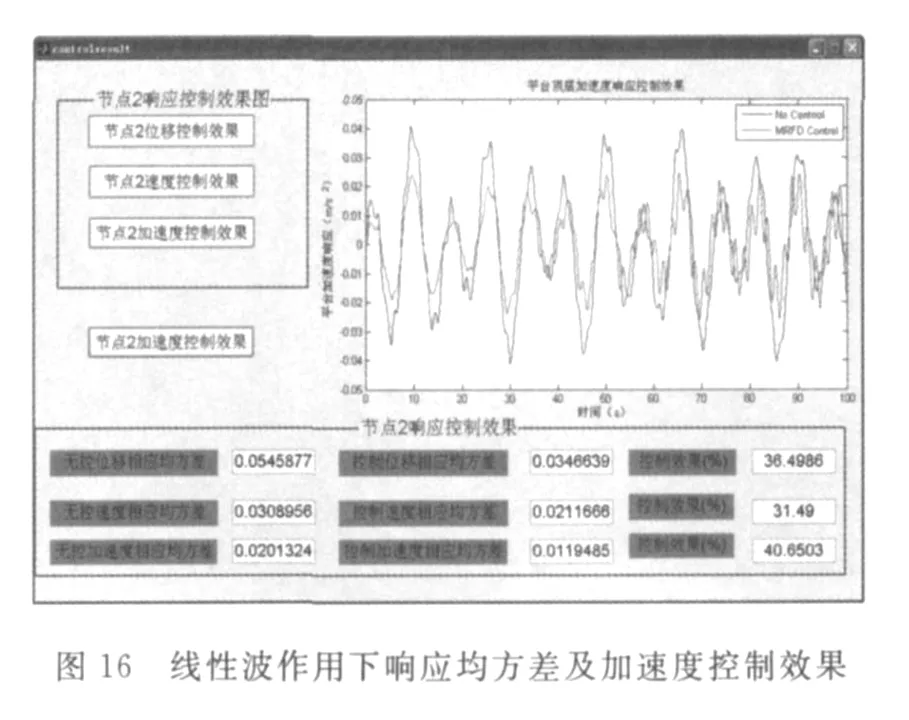
以上分析充分表明MRFD的半主動(dòng)控制系統(tǒng)對(duì)海洋平臺(tái)在隨機(jī)波和規(guī)則波載荷作用下的位移、速度及加速度動(dòng)力響應(yīng)有明顯的效果。
5 結(jié)束語
本文運(yùn)用模糊控制理論并根據(jù)磁流變液的特性設(shè)計(jì)了MRFD的控制系統(tǒng)。運(yùn)用MATLAB工具和ANSYS有限元軟件,開發(fā)了固定式海洋平臺(tái)半主動(dòng)控制系統(tǒng),模擬出了某典型導(dǎo)管架海洋平臺(tái)多自由度模型在隨機(jī)波浪荷載和規(guī)則波浪載荷作用下的動(dòng)力響應(yīng),以及在MRFD控制下海洋平臺(tái)的動(dòng)力響應(yīng)。計(jì)算結(jié)果表明,MRFD模糊半主動(dòng)控制系統(tǒng)能夠非常有效地控制海洋平臺(tái)動(dòng)力響應(yīng)。其中,規(guī)則波要好于隨機(jī)波,線性波要好于Stokes5節(jié)波,較大提高了海洋平臺(tái)抗擊隨機(jī)載荷的能力,改善了海洋平臺(tái)的工作環(huán)境。
[1] 祝世興,田靜,金平等.磁流變減震器結(jié)構(gòu)及控制算法研究[J].機(jī)床與液壓,2008,36(5):111-113.
[2] 王保兵,韓江水.MR阻尼器的特性試驗(yàn)研究[J].西安科技大學(xué)學(xué)報(bào),2008,28(1):105-108.
[3] 張春巍,歐進(jìn)萍.結(jié)構(gòu)磁流變阻尼半主動(dòng)控制的改進(jìn)算法與仿真分析[J].世界地震工程,2003,19(1):37-43.
[4] 張紀(jì)剛,吳斌,歐進(jìn)萍.海洋平臺(tái)冰振控制試驗(yàn)研究[J].東南大學(xué)學(xué)報(bào):自然科學(xué)版,2005,35(AO1):31-34
[5] 楊飏,歐進(jìn)萍.導(dǎo)管架式海洋平臺(tái)磁流變阻尼隔震結(jié)構(gòu)的模型試驗(yàn)[J].振動(dòng)與沖擊,2006,25(5):1-5.
[6] 張紀(jì)剛,吳斌,歐進(jìn)萍.渤海某平臺(tái)磁流變智能阻尼隔振控制[J].沈陽建筑大學(xué)學(xué)報(bào):自然科學(xué)版,2006,22(1):68-72.
[7] Li H J,Wang S Q,Ji C Y.Semi-Active Control of Wave-Induced Vibration for Offshore Platforms by Use of MR Damper[J].China Ocean Engineering,2002,16(1),33-40.
[8] Zhao D,Cai D M,Ma RJ,et al.The Vibration control of a combined anti-vibration platform under the rare seismic wave forces[C].Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering,OMAE 2007.
[9] 嵇春艷.海洋平臺(tái)動(dòng)力響應(yīng)分析與振動(dòng)控制技術(shù)研究[D].青島:中國(guó)海洋大學(xué).2003.
[10] 歐進(jìn)萍.結(jié)構(gòu)振動(dòng)控制——主動(dòng)、半主動(dòng)和智能控制[M].北京:科學(xué)出版社,2003,71-75.
Research on MRFD Semi-Active Fuzzy Control Theory of Jacket Offshore Platforms
HUO Fa-li1, QU Peng-xiang2
(1.Shanghai Zhenhua Heavy Industries Co.,Ltd,Shanghai 200125,China;2.Jiangsu University of Science and Technology,Zhenjiang 212003,China)
A Magnetorheological Fluid Damper(MRFD)is adopted to control the vibration of the offshore platforms under regular wave and random wave,linear wave and Stokes5 wave loads based on the fuzzy control theory is studied.Taking the displacement and velocity of platforms as the inputs variables,the calculation means of the optimal control force is gave,and the numerical simulation of the wave force is calculated by Morison equation.Taking response amplitude of platforms structural vibration control as objectives,the MRFD system is designed optimally for controling the vibration platforms.Based on the MATLAB and ANSYS,design a control interface for the platforms,a typical platform as an example to make it multi-degree-of-freedom numerical simulation.The simulation results show that MRFD semiactive vibration control system is obviously effective on the offshore platforms.
offshore platform;fuzzy control theory;MRFD;semi-active control
P751
A
2009-09-13;修改稿收到日期:2009-12-28
國(guó)家自然科學(xué)基金資助項(xiàng)目(50609009)
霍發(fā)力(1982-),男,碩士,主要從事船舶與海洋工程方面的設(shè)計(jì)研究。
1001-4500(2010)02-0039-06
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中老年保健(2021年12期)2021-11-30 02:58:01
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
中國(guó)公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
Coco薇(2016年8期)2016-10-09 02:11:50
中國(guó)醫(yī)藥科學(xué)(2015年19期)2015-02-27 12:33:11
