大功率電機應用于造波機控制系統的可行性研究
2010-09-09 01:46:12李木國
中國海洋平臺 2010年2期
關鍵詞:實驗
李木國,劉 闖, 王 靜,
)張 群
大連理工大學,大連 116024
大功率電機應用于造波機控制系統的可行性研究
李木國,(劉 闖, 王 靜,
)張 群
大連理工大學,大連 116024
結合實際課題取得的成功經驗,介紹了大功率大型不規則波造波機控制系統的組成及工作原理,闡述了該系統實驗工作過程中的性能以及特性曲線,實驗結果證實大功率電機應用于大型造波機領域頻繁正反轉的可行性。
造波機;大功率;運動控制;伺服電機;控制系統
Abstract:With the success experience of practical issues,this paper introduces composition and working principle of the irregular large high-power wave-maker system.Performance and characteristic curves during the experimental work of the system are described.Experimental results show that it is feasible to apply high-power motor to bidirectional rotation frequently in the field of large wave-maker system.
Key words:wave-maker system;high-power;motion control;servo motor;control system
0 引言
隨著海洋工程技術的發展,科研人員急需在試驗水池中精確模擬產生大波高(波高大于1.1 m),提高實驗研究精度,完成各種物理實驗研究,為工程設計和科學研究提供可靠依據。本文結合實際工程情況,試制了一臺大功率電機驅動大型造波機系統,該造波機系統可產生周期4 s,波高1.15 m的浪。造波板的最大推力6 t,最大速度1.5 m/s,最大行程1.8 m,電機功率108 kW。
由于伺服電機控制性能好,快速響應能力強且無污染[1,2],因而在造波機設計生產中,國內外采用電機驅動的系統越來越多[3]。但大功率伺服電機轉動慣量大,在如此大的負載下能否在給定的時間周期內完成快速頻繁正反轉,使滾珠絲杠產生往返運行,帶動造波板產生波浪,這一直是困擾我們的難題。
目前國內還沒有一臺自主研發的大功率伺服電機驅動的大型不規則波造波機,而國際上有此研制技術的國家也較少。本文結合實際成功的試驗結果,闡述了系統的組成及工作原理,總結了理論計算與實測結果的統計規律,可為大波高造波機設計者提供一定的參考。
1 控制系統總體結構及工作原理
如圖1所示,本造波機系統由上位機、內置CU310控制單元的運動控制器、伺服驅動器、電機及造波板等幾部分組成。
上位機選用的是臺灣研華生產的工控機IPC610系列,通過以太網與運動控制器組成一個小的局域網,主要完成各種波譜對應造波板運行軌跡數據的計算、控制命令的發送、采集處理各種實驗數據以及造波機運行狀況的監控;運動控制器選用SIMOTION D410,它是整個下位控制系統的核心部分,主要完成伺服電機各種運動方式的控制、CAM曲線的生成、上位機控制命令的執行和電機運行數據的采集,D410內部集成單軸控制單元CU310,可以控制1個驅動軸,既有高精度的速度控制功能,又具有簡單定位功能,實現軸的相對和絕對定位,通過PROFIBUS現場總線,D410與CU310構成主從網絡,D410為PROFIBUS主站(Master),CU310為從站(Slave),CU310和上位的SIMOTION控制系統結合在一起能實現同步、凸輪等復雜的運動控制功能;伺服驅動器選用與D410配套使用的SINAMICS S120驅動器,它集多種控制模式于一體,適合于單軸驅動,為電機提供功率驅動和伺服控制,SINAMICS伺服驅動器通過Drive-CLiQ接口將電機編碼器數據取回,實時監測電機運行狀態,并通過Drive-CLiQ接口將數據送給控制器,由控制器進行實時計算和修正,保證電機運行軌跡的準確性和平穩性,將電機運行狀態實時地記錄下來,提供給上位機調用,以便進行監控和故障處理;執行機構包括伺服電機和將旋轉運動轉換為直線運動的機械傳動裝置(滾珠絲杠),伺服電機是控制系統的控制對象,通過絲杠帶動造波板做相應的造波運動,選用了 SIEMENS 1FT6168-8WB76-8AGO型號電機,其額定功率108 kW,額定扭矩690 Nm,額定轉速1 500 r/min;造波板通過直線軸承安裝在兩個直線導軌上,通過連桿(推拉桿)與滾珠螺母滑板相接,滾珠絲杠通過聯軸器與伺服電機的軸桿相連,當電機轉動后,滾珠絲杠帶動推板往返運動產生波浪。

圖1 造波機系統總體結構圖
2 控制系統軟件設計
本軟件設計由上位機控制程序和下位控制器程序兩部分組成。
上位機部分程序是基于Microsoft Visual C++6.0環境開發的,適用于Windows 2000、Windows XP和Windows Vista等Microsoft主流操作平臺。包括儀器信息、采樣設置、實驗、數據處理、湊譜、網絡控制和控制方式等主要菜單。其中,儀器信息主要是對采樣設備—浪高儀進行標定以及對已標定好的浪高儀直接讀入標定信息;采樣設置包括采樣通道,顯示通道和采樣長度的設置;實驗菜單主要包括電機的使能、去使能、啟動造波、停止造波、啟動采樣和停止采樣等對實驗過程的一系列控制;數據處理菜單條包括極值分析、統計分析、頻譜分析、方向譜分析和過程曲線等一系列對所采集回來的數據分析處理的操作[4]。
下位控制器軟件是基于SIMOTION SCOU T軟件平臺編寫的,版本為V4.1.2。它提供了強大的配置、調試、編程和診斷功能,對控制器和驅動器的一切任務操作都可以在該軟件里實現,從最初的添加硬件設備、配置設備以及設備間通訊到控制程序的實現都在這里完成。SCOU T軟件提供了3種程序編寫方法:梯形圖、MCC運動控制框圖和ST結構文本語言。于此,我們使用了MCC和ST兩種編程語言。MCC(Motion Control Chart)是一種順序執行的圖形化編程語言,用來編寫基本的運動控制程序。它提供了大量的圖形化編程功能,降低了編程者工作的復雜程度。電機的使能、尋零和定位等功能均可通過模塊化的函數進行調用實現,設置給定參數即可執行。MCC運動控制框圖主要用來完成控制器的初始化、尋零、造波的過程控制和故障的處理,是整個下位控制程序的核心。ST結構文本,是種基于PASCAL的高級編程語言,符合IEC-6 1 1 3 1-3標準,主要用來聲明使用的變量、CAM曲線的生成以及與上位機之間的通訊程序。
在SCOU T軟件中,程序寫好后需要將其分配到執行系統的不同執行任務中才能執行,否則所有的程序都只是邏輯上的,而并沒有被執行系統真正執行。
SIMOTION中的執行系統管理著系統任務以及任務的有序執行。執行系統分為不同的等級,每個等級可包含一個或多個任務,每個任務中可分配一個或多個程序(由MCC或ST編寫好的程序)。當多個任務在某一時刻同時開始執行時,任務之間就會有沖突。執行系統規定不同的任務具有不同的優先級,優先級高的任務先執行,正在執行的低優先級的任務可以被高優先級中斷,直到高優先級的任務執行完才繼續執行低優先級的任務。因此,可以將程序分配到不同的任務來指定程序的優先級或執行順序。執行系統的任務優先級如圖2所示。
其中,造波、尋零和故障處理程序分配在了運動任務里。通訊程序由于需要不間斷接收上位機的命令,需要持續執行,將其分配到背景任務里,循環執行。電機狀態,如:溫度、位置、速度和扭矩等參數作為實時監測的變量,放在 IPO同步任務里,同步實時調用,以達到實時監測的目的。
在實驗中,起動和停止都通過程序做了緩起與緩停處理,因此起動與停止過程平緩,不會因為起停時的輸出扭矩過大而造成電機過流等情況。在造波過程中,電機的正反轉與換向也都過渡平穩,在實時監測的電機狀態中可看到電機運行過程狀態良好。
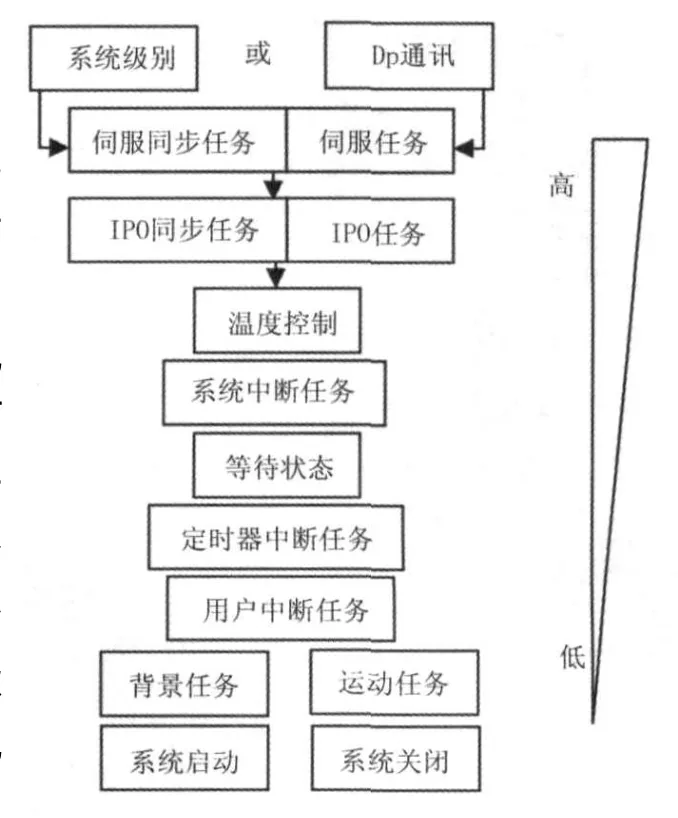
圖2 執行系統的任務優先級
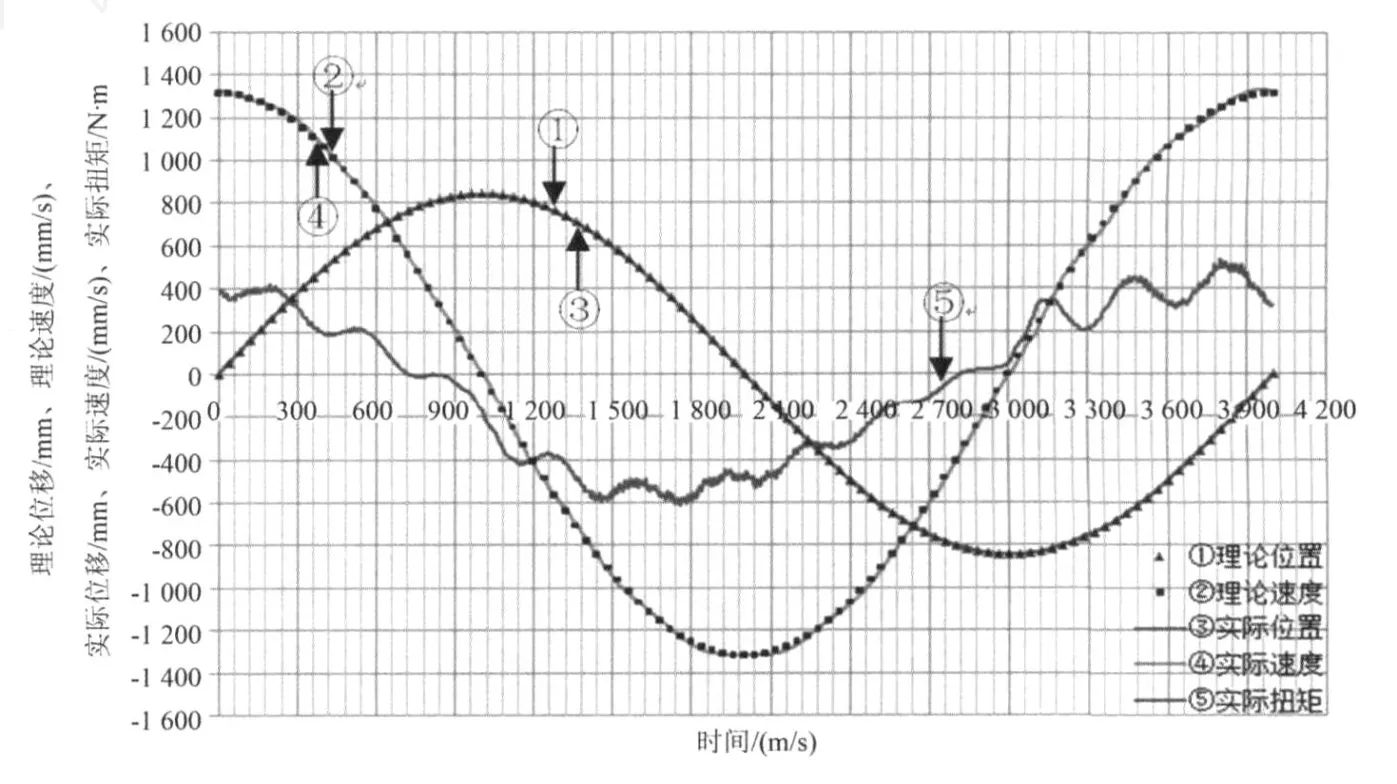
根據系統工作要求以及具體技術指標,我們做了大量的常規實驗和極限性實驗,以論證該系統的工作能力以及大功率伺服電機驅動大型造波機的可能性,并做了重復性實驗,以確保數據的可靠性。雖然是實驗平臺,還有很多不完善,但測得的實際波高數據很令人滿意,與理論值偏差很小,且在整個實驗過程電機溫度基本處于24度左右,比較穩定,說明電機工作狀態良好。常規實驗與極限波實驗都達到了滿意的效果。圖3所示為波高1.15 m、周期4 s、水深1.6 m、造波板重量1 200 kg時的理論曲線與采樣獲得的實測曲線的對比圖。從圖中可以看到,電機的最大扭矩達到了610 N·m,而最大速度達到了1 316 mm/s,已經接近了我們設計的最大值,此時工作性能很好,在換向點處,實測速度與位置曲線平滑過度沒有突變。位置曲線的實測值與理論值擬合得非常完美,誤差極小。扭矩曲線突變較多,是因在每個控制時間周期內對已完成的定位和即將執行的定位進行計算調整引起的,是正常的修正過程,不影響整個位移曲線的走勢。總體來說,已經滿足了我們設計的使用要求。通常造波機的設計者,都是按照流體力學、機械結構計算去選擇伺服電機的轉矩和轉速。這種理論計算
圖3 理論與實際運行曲線對比圖
3 可行性實驗
是否符合大功率電機的應用,是我們最關心的問題。因此我們在大量實驗之后,對數據進行了分析及對比,分別得到周期為2 s、3 s和4 s時電機實際輸出扭矩與理論計算扭矩的比值隨波高變化的關系。實際扭矩是通過采樣分析數據獲得的,做了大量重復實驗,以確保數據的可靠性。理論扭矩則通過計算獲得,計算方法如下:

式中:F推力為電機理論輸出的總推力;F水為迎水面壓強與背水面壓強差造成的阻力和運動物體側面流體相對運動時產生的摩擦阻力;F絲杠+聯軸器為滾珠絲杠與聯軸器部分產生的阻力;m造波板a為造波板加速度產生的推力。而 F水根據波浪造波理論,有

式中 Fr和FI分別為由于造波機產生的傳播波浪和板前瞬態波浪對造波板產生的壓力[5],可根據波浪造波理論計算,具體公式參考文獻[5]。
而 F絲杠+聯軸器所產生的扭矩可用公式(3)計算:

式中:ω為電機的角加速度;J聯軸器為聯軸器的轉動慣量;J絲杠為絲杠的轉動慣量。可通過公式(4)計算出聯軸器與絲杠的轉動慣量:

式中:L為長度;D為直徑。絲杠的長度為2.5 m,直徑80 mm。因此,經計算 J絲杠=0.079 kg·m2,J聯軸器=0.022 kg·m2。
通過上述公式計算,得到了在不同周期與波高下的最大理論扭矩,并通過與實際采樣扭矩最大值比較,得到了周期為2 s、3 s和4 s時實際扭矩與理論扭矩的比值隨波高變化的關系,如圖4所示。其中,周期2 s時波高取值為0.2 m~0.7 m;周期3 s時波高取值為0.2 m~0.9 m;周期4 s時波高取值為0.5 m~1.15 m。
對比以上曲線發現,在同一個周期下,波高越高,實際扭矩與理論扭矩比值越小,當波高較小時,比值較大,即在同一周期下,實際扭矩與理論扭矩比值隨著波高的增加而減小;對比不同周期的曲線發現,隨著周期的增加,這種實際扭矩與理論扭矩隨波高的變化率越來越小,在4 s時,幾乎呈水平線。此外,在相同波高下,周期越大,實際扭矩與理論扭矩越接近。周期4 s時,實際扭矩與理論扭矩比值基本在1附近,擬合較好。
這樣,在我們關心的造波范圍內,造波性能得到了滿足,并且分析數據得到了實際扭矩隨波高周期變化與理論扭矩的對應關系,更加方便了下一步的開發設計工作。

圖4 波高-實際扭矩/理論扭矩曲線
4 結論
本文通過對SIEMENS大功率伺服電機的調試運行,構成了一套單板的大型造波機實驗系統,不僅完成了功能性的設計工作,并且通過大量的實驗證實了大功率伺服電機驅動大型造波機系統的可行性,為國內自主研發大功率電機驅動造波機奠定了基礎,為以后進行多臺電機同步調試,完成多板大型不規則波造波機系統的研制提供了依據和參考。
[1] 李木國,金乃高等.計算機技術在方向譜造波機控制軟件中的應用[J].中國海洋平臺.2001,(5-6):62-67.
[2] 金乃高.液壓伺服多向不規則波造波機控制系統的設計與實現[D].大連:大連理工大學,2002.
[3] 李木國,張豐,王靜等.基于Winsock類開發的造波機控制系統通訊軟件設計[J].計算機工程與設計.2009,6:1536-1538.
[4] 王靜,張群,李木國.基于網絡控制的方向譜造波機系統[J].中國海洋平臺.2007,22(3):52-54.
[5] Hughes S A.Physical Models and Laboratory Techniques in Coastal Engineering[M].World Scientific,1993.
Feasibility Study of High-Power Motor Applied to Wave-Maker Control System
LI Mu-guo, LIU Chuang, WANGJing, ZHANG Qun
(Dalian University of Technology,Dalian 116024,China)
TP29
A
1001-4500(2010)02-0018-04
2009-11-06
國家自然科學基金(50879098)資助項目
李木國(1953-),男,教授,主要從事網絡運動控制、圖像測量方向的研究。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
