基于GPS測(cè)量系統(tǒng)的艦載作戰(zhàn)系統(tǒng)動(dòng)態(tài)航向?qū)?zhǔn)技術(shù)研究
2009-04-12 07:46:06李維林唐偉方
中國艦船研究 2009年4期
李維林 李 蕾 唐偉方
中國艦船研究設(shè)計(jì)中心,湖北 武漢430064
基于GPS測(cè)量系統(tǒng)的艦載作戰(zhàn)系統(tǒng)動(dòng)態(tài)航向?qū)?zhǔn)技術(shù)研究
李維林 李 蕾 唐偉方
中國艦船研究設(shè)計(jì)中心,湖北 武漢430064
針對(duì)艦載導(dǎo)航系統(tǒng)對(duì)準(zhǔn)的實(shí)際需求,介紹一種在艦艇動(dòng)態(tài)條件下,利用GPS完成導(dǎo)航系統(tǒng)航向?qū)?zhǔn)的方法,對(duì)其中的對(duì)準(zhǔn)過程和數(shù)據(jù)處理方法進(jìn)行詳細(xì)介紹。通過精度分析,證明該對(duì)準(zhǔn)方法滿足航向?qū)?zhǔn)的要求,同時(shí)對(duì)保障條件要求低,便于操作,為艦載作戰(zhàn)系統(tǒng)的航向?qū)?zhǔn)提供了新的選擇。
作戰(zhàn)系統(tǒng);GPS測(cè)量系統(tǒng);航向?qū)?zhǔn);精度分析
1 引言
雖然我國艦艇作戰(zhàn)系統(tǒng)的對(duì)準(zhǔn)技術(shù)已得到較大提高,但是動(dòng)態(tài)條件下對(duì)準(zhǔn)工作仍然是一個(gè)難題[1]。一般來說,艦艇下水后,不可能有機(jī)會(huì)再專門安排入塢進(jìn)行導(dǎo)航系統(tǒng)對(duì)準(zhǔn)。所以在動(dòng)態(tài)條件下進(jìn)行導(dǎo)航系統(tǒng)的航向?qū)?zhǔn)是一個(gè)迫切需要解決的問題[2,3]。
隨著GPS測(cè)量技術(shù)的飛速發(fā)展,其應(yīng)用領(lǐng)域得到不斷擴(kuò)展,在強(qiáng)大的軟件支撐下,GPS已經(jīng)能夠完成動(dòng)態(tài)條件下艦艇航向的精確測(cè)量,這使得直接在系泊狀態(tài)下進(jìn)行艦艇航向的對(duì)準(zhǔn)成為可能[4]。
2 基于GPS測(cè)量系統(tǒng)的航向?qū)?zhǔn)方案
在艦載作戰(zhàn)系統(tǒng)動(dòng)態(tài)航向?qū)?zhǔn)過程中,采用雙頻的GPS接收設(shè)備,進(jìn)行差分定位測(cè)量后,將兩個(gè)站的觀測(cè)數(shù)據(jù)利用專用GPS數(shù)據(jù)后處理軟件(GrafMov)進(jìn)行數(shù)據(jù)處理,可以得出兩個(gè)GPS接收設(shè)備連線與真北方向的夾角,實(shí)現(xiàn)艦艇動(dòng)態(tài)航向的真值測(cè)量,從而為艦載導(dǎo)航系統(tǒng)的航向?qū)?zhǔn)提供真值。
GrafNav/net是加拿大專業(yè)GPS軟件公司開發(fā)的GPS/GLONASS事后處理軟件包,是GPS動(dòng)態(tài)和靜態(tài)數(shù)據(jù)處理軟件,可以非常方便地選擇組合方式進(jìn)行數(shù)據(jù)處理,得到厘米級(jí)的定位精度。同時(shí)它可以非常容易地將數(shù)據(jù)由靜態(tài)模式變換到動(dòng)態(tài)模式下進(jìn)行數(shù)據(jù)處理,有助于用戶在動(dòng)態(tài)模式下修復(fù)其它不可恢復(fù)的周跳。軟件中還包含有衛(wèi)星預(yù)報(bào)菜單,利用該功能用戶可以非常方便地計(jì)劃測(cè)量的時(shí)間,將測(cè)量時(shí)段選擇在衛(wèi)星狀況較好的情況下進(jìn)行測(cè)量,從而取得更好的定位結(jié)果。方案中所使用的后處理軟件GrafMov包括了Graf-Nav/Net的所有功能,并增加了動(dòng)態(tài)基線的處理功能,即移動(dòng)基線處理與航向解算功能[5]。
進(jìn)行動(dòng)態(tài)航向?qū)?zhǔn)時(shí),艦艇處于系泊狀態(tài),根據(jù)不同艦艇配置的導(dǎo)航系統(tǒng)不同,在進(jìn)行動(dòng)態(tài)航向?qū)?zhǔn)之前提前6~8 h開機(jī)工作,以使其輸出穩(wěn)定的航向數(shù)據(jù)。
在進(jìn)行航向?qū)?zhǔn)檢測(cè)時(shí),在艦艇甲板中線面的前后中線面標(biāo)志板上各架設(shè)1臺(tái)GPS接收機(jī),精確校準(zhǔn)GPS接收機(jī)的位置,按照標(biāo)志板中心對(duì)中調(diào)平,測(cè)量甲板上艦艇中線面上標(biāo)志板連線的方位角并同步記錄導(dǎo)航系統(tǒng)輸出的航向值。
利用GPS測(cè)量系統(tǒng)進(jìn)行i次(i=1,2,3)連續(xù)測(cè)量。每次測(cè)量時(shí)間約為30 min,按每秒鐘取得1個(gè)航向測(cè)量值計(jì)算,每次連續(xù)測(cè)量大約可以獲得有效數(shù)據(jù)1 800個(gè),按以下的算式計(jì)算導(dǎo)航系統(tǒng)航向測(cè)量的瞬時(shí)誤差。

在計(jì)算得出每一瞬時(shí)航向測(cè)量誤差值后,按下式計(jì)算每次連續(xù)測(cè)量時(shí)間段內(nèi)的航向誤差算術(shù)平均值。

根據(jù)各時(shí)段所得的瞬時(shí)誤差的平均值,按下式計(jì)算航向誤差平均值。
式中,ΔKij為在第i次GPS測(cè)量過程中導(dǎo)航系統(tǒng)第j個(gè)航向測(cè)量誤差;Kij為在第i次GPS測(cè)量過程中導(dǎo)航系統(tǒng)第j個(gè)所測(cè)的航向值;KGPSij為在第i次GPS測(cè)量過程中GPS系統(tǒng)測(cè)量的第j個(gè)航向真值;ΔKi為在第i次GPS測(cè)量過程中,航向瞬時(shí)誤差值的算術(shù)平均值;ΔK為在整個(gè)測(cè)量過程中,航向誤差的算術(shù)平均值。
如果所得的航向誤差ΔK的絕對(duì)值不超過導(dǎo)航系統(tǒng)航向的對(duì)準(zhǔn)精度指標(biāo)要求,則認(rèn)為導(dǎo)航系統(tǒng)航向輸出的精度是合格的。
如果所得的航向誤差ΔK的絕對(duì)值超過導(dǎo)航系統(tǒng)的對(duì)準(zhǔn)精度指標(biāo)要求,則對(duì)導(dǎo)航系統(tǒng)航向零位進(jìn)行修正,再次進(jìn)行動(dòng)態(tài)對(duì)準(zhǔn)試驗(yàn),直到滿足要求為止。
3 動(dòng)態(tài)航向?qū)?zhǔn)精度分析
利用差分GPS進(jìn)行動(dòng)態(tài)航向測(cè)量的誤差源主要有如下兩個(gè)方面。
1)GPS測(cè)量系統(tǒng)測(cè)量誤差
根據(jù)GPS測(cè)量系統(tǒng)的技術(shù)參數(shù)可以看出,差分測(cè)量方式下,根據(jù)不同的GPS測(cè)量系統(tǒng)及處理方法[6],GPS動(dòng)態(tài)相對(duì)定位準(zhǔn)確度為2~10 cm,本方法所使用的GPS及處理軟件可以達(dá)到的精度為2 cm,設(shè)定測(cè)量基線長度為L(m),則GPS動(dòng)態(tài)方位測(cè)量精度為:
對(duì)于1艘長約150 m的大型水面艦艇,測(cè)量基線長度約為140 m,則方位測(cè)量精度為30″。
2)橫搖引起的GPS測(cè)量誤差
由于艦艇中線面上前后架設(shè)的GPS天線存在高度差,同時(shí),由于艦艇系泊及航行過程中存在橫搖角,這就使得GPS實(shí)際天線的連線并不與中線面平行,勢(shì)必造成GPS測(cè)得的航向值并非中線面所對(duì)應(yīng)的值,存在一定偏差,也使得GPS實(shí)際測(cè)量的航向與導(dǎo)航系統(tǒng)的航向基準(zhǔn)存在偏差。如圖1所示,B點(diǎn)與D點(diǎn)為艦艇中線面上GPS架設(shè)的實(shí)際位置,AB為中線面上平行于艦艇水平基準(zhǔn)的直線,C點(diǎn)為D點(diǎn)在AB所確定的平行于艦艇水平基準(zhǔn)的平面上的投影,即ABC平面為橫搖情況下與艦艇水平基準(zhǔn)平行的平面,Δh為前后GPS天線高度差,艦艇橫搖角為α,BC與真北的夾角即為GPS所測(cè)得的航向值,其與中線面的偏差角為β,計(jì)算公式如下。


圖1 艦艇橫搖對(duì)GPS航向測(cè)量的精度影響示意圖
在艦艇主甲板的中線面上均設(shè)置有標(biāo)志板,在艦艇上前后標(biāo)志板的高度差不超過1 m,同時(shí)通過調(diào)整GPS天線的架高,可以保證前后GPS天線高差Δh小于1 m,根據(jù)艦艇實(shí)際系泊情況統(tǒng)計(jì),可以保證其橫搖角小于1°,由此可以計(jì)算得出在此情況下,由于艦艇橫搖引起的GPS測(cè)量航向的誤差。

綜合以上兩方面的誤差,可以得出利用GPS測(cè)量航向時(shí)所具有的精度為:

按“艦船系統(tǒng)對(duì)準(zhǔn)要求”(GJB 1233-91),對(duì)準(zhǔn)方法誤差均不會(huì)大于艦面設(shè)備對(duì)準(zhǔn)容差的1/3~1/10。
根據(jù)目前一般艦艇導(dǎo)航系統(tǒng)的精度,該精度完全可以滿足其對(duì)準(zhǔn)要求。所以,可以利用GPS動(dòng)態(tài)航向測(cè)量方法來進(jìn)行導(dǎo)航系統(tǒng)的航向?qū)?zhǔn)。
4 試驗(yàn)驗(yàn)證過程
筆者在實(shí)船動(dòng)態(tài)條件下對(duì)上述艦載導(dǎo)航系統(tǒng)的動(dòng)態(tài)航向?qū)?zhǔn)方法進(jìn)行驗(yàn)證,下面介紹有關(guān)試驗(yàn)方法和數(shù)據(jù)記錄及處理情況。
4.1 導(dǎo)航系統(tǒng)航向?qū)崪y(cè)值的獲取
我國目前導(dǎo)航系統(tǒng)采用以太網(wǎng)與作戰(zhàn)系統(tǒng)相連接,這就使得作戰(zhàn)系統(tǒng)下的檢測(cè)錄取設(shè)備能夠?qū)崟r(shí)地錄取導(dǎo)航系統(tǒng)輸出的航向值,該設(shè)備可以在線翻譯、解釋錄取的報(bào)文,對(duì)原始報(bào)文數(shù)據(jù)進(jìn)行分析處理后以文本文件存儲(chǔ),在進(jìn)行動(dòng)態(tài)航向?qū)?zhǔn)時(shí),檢測(cè)錄取設(shè)備與外部時(shí)鐘對(duì)時(shí)后,與GPS測(cè)量系統(tǒng)同步記錄試驗(yàn)數(shù)據(jù),并在試驗(yàn)結(jié)束后將所記錄數(shù)據(jù)進(jìn)行存儲(chǔ)。表1為利用專用軟件處理檢測(cè)錄取設(shè)備錄取的導(dǎo)航系統(tǒng)航向數(shù)據(jù)后的結(jié)果。
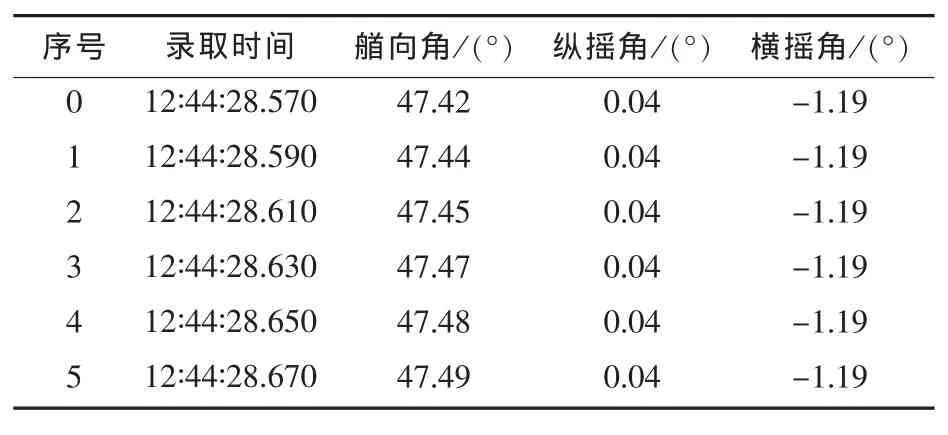
表1 導(dǎo)航系統(tǒng)航向數(shù)據(jù)處理結(jié)果
4.2 航向測(cè)量真值的獲取
在獲得GPS測(cè)量原始數(shù)據(jù)后,利用專用GPS數(shù)據(jù)后處理軟件GrafMov進(jìn)行數(shù)據(jù)處理,實(shí)現(xiàn)艦艇動(dòng)態(tài)航向的真值測(cè)量,從而為艦載導(dǎo)航系統(tǒng)的航向?qū)?zhǔn)提供真值,該真值數(shù)據(jù)率為1次/s。
利用GPS后處理軟件GrafMov對(duì)GPS測(cè)量數(shù)據(jù)進(jìn)行處理后得到如表2所示的真值數(shù)據(jù)。
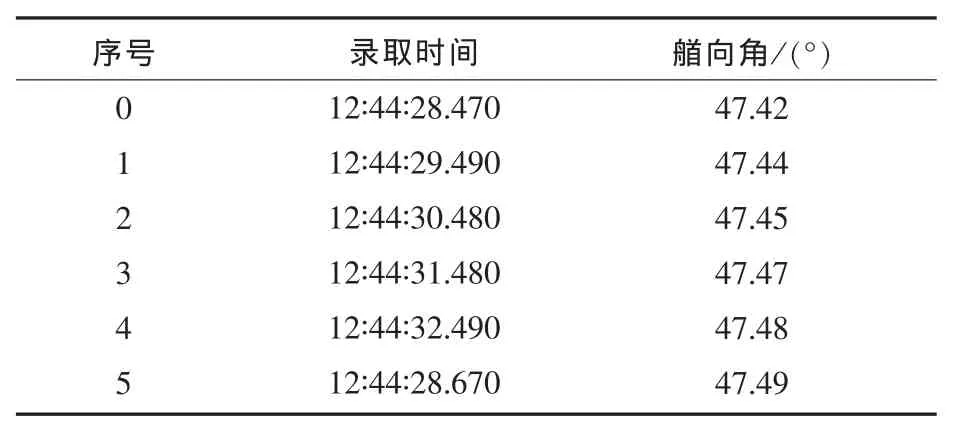
表2 GPS測(cè)量真值數(shù)據(jù)
4.3 GPS測(cè)量航向與本艦航向數(shù)據(jù)比對(duì)方法
在艦船系泊或航行狀態(tài)下,其航向?qū)崪y(cè)值與GPS測(cè)量真值都是隨時(shí)間變化的量,且兩組參數(shù)的數(shù)據(jù)率不相同,如某型艦導(dǎo)航系統(tǒng)實(shí)際輸出航向數(shù)據(jù)率為50幀/s,GPS測(cè)量系統(tǒng)處理后數(shù)據(jù)率為1幀/s。為了比對(duì)、分析測(cè)量值與真值之間的誤差,必須要將二者在同一時(shí)刻進(jìn)行比較,以保證數(shù)據(jù)有效性。為此,在Visual C++環(huán)境下,筆者使用標(biāo)準(zhǔn)的Visual C++語言編寫了GPS測(cè)量航向與本艦航向數(shù)據(jù)比對(duì)軟件,實(shí)現(xiàn)GPS測(cè)量航向與本艦實(shí)際輸出航向的比對(duì)。該軟件運(yùn)行時(shí),首先逐行讀取經(jīng)過處理的如表1所示的以TXT文件格式存儲(chǔ)的導(dǎo)航系統(tǒng)航向測(cè)量值,然后讀取經(jīng)過GPS后處理軟件處理后以TXT文件格式存儲(chǔ)的GPS測(cè)量真值,其格式如表2所示。每讀取一幀航向?qū)崪y(cè)值后,根據(jù)“錄取時(shí)間”變量的值,在GPS測(cè)量值中選擇與其同一時(shí)刻的真值,并將真值與測(cè)量值一并寫入文件,直到所有航向測(cè)量值均找到與之對(duì)應(yīng)的GPS測(cè)量真值為止,并以TXT文件格式存儲(chǔ),表3所示為一組實(shí)際處理后的數(shù)據(jù)。
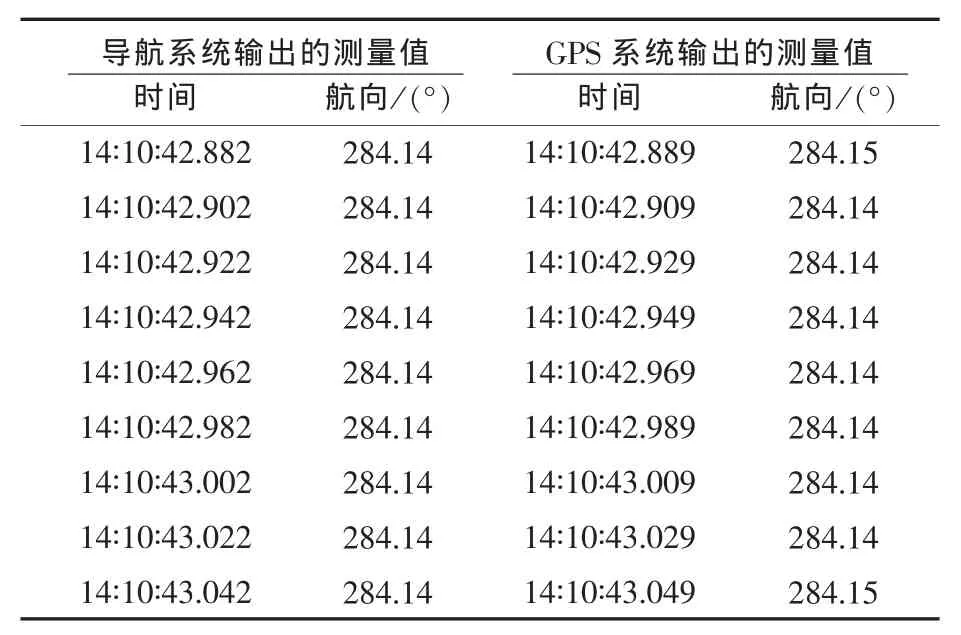
表3 GPS航向測(cè)量數(shù)據(jù)對(duì)齊結(jié)果
根據(jù)獲得的航向測(cè)量值與GPS真值 “對(duì)齊”后的數(shù)據(jù),分析航向誤差,從而得出檢測(cè)結(jié)論,確定航向修正量,導(dǎo)航系統(tǒng)據(jù)此完成動(dòng)態(tài)航向?qū)?zhǔn)。
5 結(jié)束語
隨著GPS技術(shù)的快速發(fā)展,其應(yīng)用范圍越來越廣,其通用成熟的技術(shù)對(duì)于作戰(zhàn)系統(tǒng)動(dòng)態(tài)對(duì)準(zhǔn)來說是一種非常便捷、高效的手段。本文所介紹的方法充分利用了GPS測(cè)量系統(tǒng)的成熟技術(shù),結(jié)合艦載作戰(zhàn)系統(tǒng)中導(dǎo)航系統(tǒng)的實(shí)際特點(diǎn)和需求,并靈活利用現(xiàn)有裝備,形成了一套完整的動(dòng)態(tài)條件下航向?qū)?zhǔn)的方法,并通過理論分析和試驗(yàn)驗(yàn)證,證明了該方法的合理性和可行性。該方法對(duì)保障條件要求低,便于操作,為艦載作戰(zhàn)系統(tǒng)的航向?qū)?zhǔn)提供了新的選擇,這種基于GPS測(cè)量系統(tǒng)的動(dòng)態(tài)航向?qū)?zhǔn)方法和技術(shù)必將在將來的實(shí)際應(yīng)用中發(fā)揮重要作用。
[1]鄒立.動(dòng)態(tài)條件下導(dǎo)航系統(tǒng)航向?qū)?zhǔn) [J].艦船光學(xué),2003,39(3):30-34.
[2]馬恒,許江寧,張曉峰,等.基于全站儀的高精度動(dòng)態(tài)航向初始標(biāo)校系統(tǒng)設(shè)計(jì) [J].計(jì)算機(jī)測(cè)量與控制,2005,13(6):587-589,597.
[3]馬恒,許江寧,朱濤.高精度航向姿態(tài)信息標(biāo)校方法和測(cè)量模型研究[J].中國慣性技術(shù)學(xué)報(bào),2004,12(2):77-80.
[4]徐紹銓,張華海,楊志強(qiáng),等.GPS測(cè)量原理及應(yīng)用[M].武漢:武漢大學(xué)出版社,2001.
[5]Waypoint Consulting Inc.GrafNav/GrafNet and GrafNav Lite Introductory Manual to GPS Surveying[S].Canada,2000.
[6]劉高峰,劉健.基于GPS定位系統(tǒng)的艦船雷達(dá)標(biāo)校系統(tǒng)研究[J].艦船科學(xué)技術(shù),2006,28(6):100-102,114.
[7]沙定國.實(shí)用誤差理論與數(shù)據(jù)處理[M].北京:北京理工大學(xué)出版社,1993.
Dynamic Course Alignment on Ship-board Combat System Based on GPS Measure System
Li Wei-lin Li Lei Tang Wei-fang
China Ship Development and Design Center,Wuhan 430064,China
This paper introduces the course alignment technique based on GPS measure system when the ship is dynamic for the requirement of ship navigating system alignment.The alignment process and the way of data processing are introduced in detail.Precision analysis indicates that the alignment technique can satisfy the course alignment.It is easy to adopt this method that offers a new choice of course alignment on ship-board combat system.
combat system;GPS measure system;course alignment;accuracy analysis
U675.5
A
1673-3185(2009)04-68-04
2009-02-12
李維林(1979-),男,工程師,碩士。研究方向:艦載作戰(zhàn)系統(tǒng)及對(duì)準(zhǔn)。E-mail:lwl1200@163.com
李 蕾(1963-),女,高級(jí)工程師。研究方向:艦載作戰(zhàn)系統(tǒng)及對(duì)準(zhǔn)
猜你喜歡
環(huán)球時(shí)報(bào)(2022-12-30)2022-12-30 15:15:00
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鳳凰動(dòng)漫(軍事大王)(2022年3期)2022-06-17 01:46:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21