基于進化規(guī)劃算法的艦船輻射噪聲分類
2009-04-12 07:46:02丁永忠
中國艦船研究 2009年4期
丁永忠 方 興
1海軍駐西安東風儀表廠軍事代表室,陜西 西安710065 2海軍駐第七O九研究所軍事代表室,湖北 武漢430070
基于進化規(guī)劃算法的艦船輻射噪聲分類
丁永忠1方 興2
1海軍駐西安東風儀表廠軍事代表室,陜西 西安710065 2海軍駐第七O九研究所軍事代表室,湖北 武漢430070
神經網絡分類器在艦船輻射噪聲分類中得到了廣泛的應用。針對神經網絡分類器的設計困難,提出一種基于進化規(guī)劃算法的設計方法。在該方法中,進化算法的適應度函數(shù)不是取為神經網絡分類器對訓練樣本的識別率,而是對訓練樣本的可分性和聚合度同時考慮,這樣能夠在保證識別精度的前提下,使網絡分類器具有良好的泛化能力,而且該方法不僅能夠對待識別的樣本進行離線學習,也能夠在線學習。使用該分類器對艦船輻射噪聲進行分類識別試驗,結果表明該方法設計的分類器具有良好的性能。
神經網絡;進化算法;分類器;艦船輻射噪聲
1 引言
誤差反傳(BP)神經網絡分類器是最早應用于艦船輻射噪聲被動聲吶目標的神經網絡分類器[1-5],已經證明,具有合適的隱層結構和隱層節(jié)點數(shù)目的BP網絡能夠實現(xiàn)對特征空間任意的(超)曲面劃分,但是BP網絡的隱層結構以及隱層節(jié)點數(shù)目的確定是非常困難的,通常需要多次試驗方能得到合適的隱層結構和隱層節(jié)點數(shù)目,而且BP網絡對新的樣板進行學習時,需要改變所有的網絡權值,因此BP網絡對新樣本的學習速度相當慢,而且BP網絡的學習和訓練算法一般使用梯度下降法,一旦網絡的誤差曲面為一個不規(guī)則的曲面,BP網絡很容易陷入局部最小從而導致識別率的下降。近年來,由于結構簡單、學習與訓練速度快等原因,徑向基函數(shù)(RBF)神經網絡在模式識別,包括在水聲信號分類識別中得到了應用[6-8]。
應用于水聲目標識別的RBF網絡的隱層訓練方法通常均為自組織學習方法[9],即K-均值聚類算法,在無教師監(jiān)督的條件下進行。該方法對訓練樣本在特征空間的分布有較高的要求,并要求給出正確的隱節(jié)點數(shù)和合適的初始權值。但在實際水聲目標識別應用時,這些條件很難同時滿足。
在被動聲吶目標識別中,異類目標間可能會表現(xiàn)出較多的相似特征,而有些同類目標的特征則可能分布較為離散,使訓練樣本在特征空間的分布很不均勻。這時,像K-均值聚類算法這樣無監(jiān)督地對訓練樣本的簡單空間分割也就容易產生異類目標間的模糊,從而影響網絡的分類性能。另外,對于特征結構復雜的水聲目標輻射噪聲信號,究竟將特征空間劃分成多少個區(qū)域 (即取多少個隱節(jié)點數(shù)),以及每個區(qū)域的初始中心取什么值才能較好地將不同模式的特征區(qū)分開是很難預先確定的。隱節(jié)點數(shù)取得太少則必然使不同模式的輸入樣本歸入同一節(jié)點代表的區(qū)域,造成模式劃分的模糊。太多的隱節(jié)點則一方面隨網絡規(guī)模的擴大增加了計算復雜度,另一方面也給輸出層訓練時獲得全局極小誤差帶來了困難。不合適的初始權值則可能會引導網絡訓練向不正確的區(qū)域偏移。因此在本文中,使用雙群進化規(guī)劃算法[10]來解決徑向基函數(shù)神經網絡的隱層結構確定,隱層節(jié)點參數(shù)(包括中心向量、徑向基函數(shù)寬度),以及徑向基函數(shù)神經網絡分類器的在線學習及結構調整問題。在本文中把使用進化規(guī)劃算法設計得到的徑向基函數(shù)神經網絡簡稱為EPRBF(Evolutionary programming based radial basis function)神經網絡。
2 基于雙群進化規(guī)劃算法的RBF隱層設計
設待識別的樣本集為X={xi|i=1,2,…,N},式中xi為一K維模式向量,分類問題就是要找到一個空間模式劃分C={C1,C2,…,Cm},并滿足:
并且使總的類內離散度和
最小。同時借鑒基于支持向量機的模式識別方法[11],定義類間離散度和:

在識別中并使其最大。式中,ZL為第L個聚類的聚類中心,d(xi,ZL)為某一樣本到其對應的聚類中心的距離,在本文中使用歐氏距離。則聚類準則函數(shù)JC即為各樣本到其對應的聚類中心的距離總和;JC最小表征的是具有相似特征的船舶盡量能夠聚合為一類;聚類準則函數(shù)JD為各樣本到其他聚類中心的距離的總和。JD盡量大則表征不同類別的船舶能夠盡量的相互區(qū)分。
使用進化規(guī)劃算法求解特定問題的關鍵在于:
1)如何選擇合適的適應度函數(shù)來準確地描述需要解決的問題;
2)如何選擇合適的個體,將問題的解編碼到個體。
顯然,對于任意一個分類識別問題而言,同時滿足JC最小和JD最大是不可能的,因此必須在類間聚合度和類間可分性間折中。對JC和JD同時進行優(yōu)化,是進化規(guī)劃算法中一個很重要的研究方向,即二元優(yōu)化問題。對于此類二元優(yōu)化問題,經常使用偏好信息進行決策[12],使用偏好信息的決策策略是建立在 “決策者愿意承擔由于使用自己的偏好進行決策產生的一定風險”的假設基礎之上的,由于偏好是決策者的主觀的選擇趨向,因此對于同一問題不同的決策者很可能產生不同的決策(選擇)。為了避免對于同樣問題產生不同決策的弊病,在本文中使用一種固定的折中方式來代替決策者的偏好信息。因此定義:

將一個二元優(yōu)化問題轉化為一個一元優(yōu)化問題。式中,N為樣本數(shù)目;L為聚類中心數(shù)目;α與β為常數(shù)。它們不同的取值將影響神經網絡分類器的識別精度和推廣能力,在本文中α=β=0.5。指標J代表一個全局最小值,很多局部極值的函數(shù)。因此定義適應度函數(shù):

在上式中,C為一個正的大常數(shù),以保證適應度函數(shù)的非負性。
在選擇了合適的適應度函數(shù)以表征問題以后,需要尋找合適的編碼機制將問題的解編碼到個體。在對J進行優(yōu)化的過程中,需要求解的參數(shù)有兩個,一個是聚類中心的數(shù)目,另一個是對應于聚類中心數(shù)目的聚類中心位置。一般對于神經網絡分類器訓練而言,訓練集中的個體究竟為多少類是已知的,雖然這個已知的數(shù)據并不一定正確和準確,但也大概可以表征個體的類別數(shù)目。如果把聚類中心數(shù)目也作為一個進化規(guī)劃算法求解的對象,算法將變得極為復雜,需要的計算量也非常大,計算時間很長,同時種群中個體的數(shù)目急劇膨脹,需要的存儲開銷也急劇增加。因此本文并不把聚類中心數(shù)目作為進化規(guī)劃算法的求解對象,而是在已知的分類數(shù)目附近分別計算不同的分類數(shù)對應的Fit(Z),然后找出其中最大的Fit(Z)所對應的聚類中心數(shù)目和聚類中心位置。
本文中使用分階段的編碼方式,首先使用分散編碼,經過固定代數(shù)的進化找到近似的聚類中心位置,然后使用集中編碼方式來求解精確的聚類中心位置。使用進化規(guī)劃算法對徑向基函數(shù)神經網絡的隱層進行設計的流程如下所述:
1)L=L0-H1,L為聚類中心數(shù)目;L0為訓練集已知的大概的分類數(shù);H1為一設定值,與搜索的聚類中心數(shù)目的下限有關。
2)判斷。如果L>L0+H2,比較對應于不同的L的適應度函數(shù)Fit(Z),找到最大的Fit(Z)對應的L,以及對應于此個L的聚類中心位置Z1,Z2,…,ZL,輸出計算結果。如果L≤L0+H2,轉步驟3)。H2為一設定值,與搜索的聚類中心數(shù)目的上限有關。
3)選擇合適的種群個體數(shù)目N,并有N=P× L,P為正的常數(shù)。種群規(guī)模N不能選得很小,如果N很小,在有限次的進化代數(shù)內的精度很可能達不到要求。如果N很大,需要的計算時間和計算量以及存儲空間要增大很多。因此必須合適地選擇種群規(guī)模N,在計算速度和計算精度間采取某種折中。選擇合適的隨機競爭個體數(shù)目q,在本文中,令q=1.5×N,在保證解的精度的前提下,盡量提高算法收斂速度。設置分散編碼搜索的最大進化代數(shù)Kmax=500,設置當前進化代數(shù)K=0,選取高斯變異算子標準差的初值σ0=0.01×個體每一維區(qū)間的寬度;
4)種群初始化。對種群的初始化有兩種方法,第一種方法是在艦船噪聲特征空間中隨機產生N個個體作為初始種群,第二種方法是在樣本中按照類別隨機地選出N個個體作為初始種群。第一種方法雖然更符合進化規(guī)劃算法種群初始化的一般原則,但是這種方法是在一個空間中從隨機的點出發(fā)去尋找合適的解,此方法并沒有利用訓練樣本已經有大致的分類結果這一有用的信息,而且其需要的進化代數(shù)和進化時間都是很長的,因此本文中并未使用此種方法。在使用第二種初始化方法時有以下幾種情況需要考慮:
(a)L<L0。在此種情況下,在L0個粗略分類中隨機選擇L個聚類,并在這L個聚類中分別選取出10個個體共10×L個個體作為初始種群。在此種情況下,由于每個聚類包含的個體數(shù)目不同,有的聚類中的個體數(shù)目可能不足10個。假設此聚類包含Q個個體,首先將這Q個個體全部選出,然后在這Q個個體中隨機選擇出10-Q個個體,然后與其他子群的個體一起構成初始種群。
(b)L≥L0。在這種情況下,預期的樣本聚類數(shù)目已經大于已知的粗略的分類數(shù)目,因此如何選擇那些多出來的聚類中心的初值是問題的關鍵。首先計算在分類數(shù)為L-1時,訓練樣本集中每一個個體到其對應的聚類中心的歐氏距離,然后選擇出其中歐氏距離最大的一個個體作為第L個聚類中心的初值。在此種情況下,依然會有聚類包含的個體數(shù)目不足10個的情況,其處理與L<L0的時候完全相同。
在初始化以后,使用隨機編碼的方式,對每一個子群中的個體從1~10編碼,并稱種群中所有編碼為1的個體為第一組,其他組則依次類推。
5)判斷是否已經到達了最大進化代數(shù),如果已經到達則輸出具有最高適應度的組作為集中編碼方式進化種群的初始種群,轉步驟8),如果沒有到達最大進化代數(shù),轉步驟6);
6)所有子群中編碼在1~5范圍內的個體組成更小的子群組ZS,其他的個體組成子群組ZL,子群組ZS中的個體使用細調高斯變異算子進行變異,并稱變異后的子群組為ZS′,子群組ZL中的個體使用粗調高斯變異算子進行變異,并稱變異后的子群組為ZL′,對于變異后的子群組中個個體編碼采用+10的方式,即原來編碼為X的個體變異產生的后代個體的編碼為10+X;
7)計算每一個子群組的適應度函數(shù),并實用隨機q競爭法則,選擇出具有最好適應度的10個子群組作為下一代種群,同時對下一代的子群進行編碼。根據隨機q競爭法則排序的結果,排在第一位的子群組編碼為1,并依次類推直至所有的子群組獲得編碼。K=K+1,轉步驟5);
8)將分散編碼方式轉化為集中編碼方式,選擇合適的種群個體數(shù)目N,合適的隨機競爭個體數(shù)目q,設置集中編碼搜索的最大進化代數(shù)Kmax,設置當前進化代數(shù)K=0,選取高斯變異算子標準差的初值σ0=0.01×個體每一維區(qū)間的寬度,設置進化終止條件;
9)采用復制的方式生成N個完全相同的個體作為集中編碼進化方式的初始種群,以隨機的方式選擇N/2個個體作為子群ZS,其他個體組成子群ZL;
10)判斷是否已經到達了最大進化代數(shù)或者滿足了進化終止條件,如果已經到達則輸出具有最高適應度的個體作為針對此分類數(shù)目的進化計算的結果,轉步驟13),如果沒有到達最大進化代數(shù),轉步驟11);
11)子群ZS中的個體使用細調高斯變異算子進行變異,并稱變異后的子群為ZS′,子群ZL中的個體使用粗調高斯變異算子進行變異,并稱變異后的子群為ZL′;
12)計算每一個個體的適應度函數(shù),并實用隨機q競爭法則,選擇出具有最好適應度的N個子群組作為下一代種群,同時根據隨機q競爭法則排序的結果,選擇排在前N/2位的個體組成子群ZS,其余個體組成子群ZL。K=K+1,轉步驟10);
13)L=L+1,轉步驟2)。
在確定了隱層節(jié)點數(shù)目及隱節(jié)點中心位置以后,還需要確定的參數(shù)就只有徑向基的寬度這一個參數(shù)。徑向基的寬度的確定方法與基于進化規(guī)劃算法的徑向基函數(shù)神經網絡隱節(jié)點中心位置的確定方法基本相似,唯一的不同點就是適應度函數(shù)的選擇,因此在本文中不再贅述。
3 徑向基函數(shù)神經網絡分類器的在線學習
訓練樣本總是不完備的,而且,作為一個可以實用的分類識別系統(tǒng)而言,在其使用過程中,隨著時間的推移,總要有一些新的艦船加入到待識別的隊伍,因此神經網絡分類器必須具有在線學習能力,即能夠將那些未曾訓練過的樣本進行準確的分類。
假設在神經網絡分類器的使用過程中,遇到一個不屬于任何一個已知類別的樣本,那么以這個新的樣本作為一個聚類中心,并使用進化規(guī)劃算法對網絡的隱層結構進行重新設計和優(yōu)化,其設計方法與上節(jié)的訓練方法中增加一個新的類別的訓練方法完全一致,因此不再重復。
由于訓練樣本的不完備性會造成模式空間的劃分不盡合理,神經網絡會把屬于某類目標的樣本誤判為代表新模式的樣本,并被進化規(guī)劃聚為一個新類,在隱層輸出。因此,在神經網絡的在線學習過程中,需要合并代表同一目標模式的冗余節(jié)點。如果對于同一個輸入樣本Xi有:

則將第i和第j個隱層節(jié)點合并為一個節(jié)點。在上式中,oi,oj為第i個和第j個隱節(jié)點的輸出,Zi,Zj為第i個和第j個隱節(jié)點的中心向量,ρi,ρj為第i個和第j個隱節(jié)點基函數(shù)的寬度。θ是一個設定值,一般取e-1~1之間,θ太小容易造成類間混淆,影響神經網絡的識別精度,θ太大容易造成分類過細,造成神經網絡的規(guī)模急劇膨脹,在本文中,θ取0.72。Zi=[Zi1,Zi2,…,Zin]為第i個隱層節(jié)點的中心向量,那么合并后的新節(jié)點為:

4 艦船輻射噪聲分類實驗
為檢驗EPRBF分類器的性能,我們對收集到的44個水面和水下運動目標以及不同海況下的海洋環(huán)境噪聲的實錄信號進行識別試驗。其中水面和水下運動目標共有89個不同工況和航次,海洋環(huán)境噪聲為3種不同海況。所獲得的水面、水下運動目標及海洋環(huán)境噪聲以22 050 Hz采樣頻率采集信號,取1.486 08 s時間長度的信號,即32 768個數(shù)據點構成一個樣本,共采集了4 745個數(shù)據樣本,以此作為試驗樣本集。在4 745個樣本集中選擇1 132個樣本作為訓練集,其余的3 613個樣本作為測試集。其中訓練集中包含了所有類型的艦船(魚雷、環(huán)境噪聲),但是并不包含每類艦船的所有工況(海況)。同時,用A類表示水面艦船,B類表示水下低速運動目標,C類表示水下高速運動目標,D類表示環(huán)境噪聲。
為了比較EPRBF網絡分類器的性能,同樣構筑了標準的BP網絡分類器和RBF網絡分類器作為比照對象。這三種神經網絡分類器具有類似的結構,均為三層結構,一個輸入層,一個輸出層和一個隱層。輸出層有4個節(jié)點,與A、B、C、D類型相適應,輸出層的決策采用贏者獨活(Winner Takes All)策略。BP網絡和RBF網絡的隱層節(jié)點數(shù)目則根據設定的誤差不同而不同,EPRBF網絡分類器的隱層結構則是使用進化規(guī)劃算法優(yōu)化得到,與誤差并沒有直接的關系。神經網絡的訓練均使用成批訓練的方法,即每輸入100組數(shù)據,對網絡的權值進行一次調整。各種神經網絡在不同的誤差下的隱層節(jié)點數(shù)目、訓練時間和識別一個樣本所需時間如表1所示。
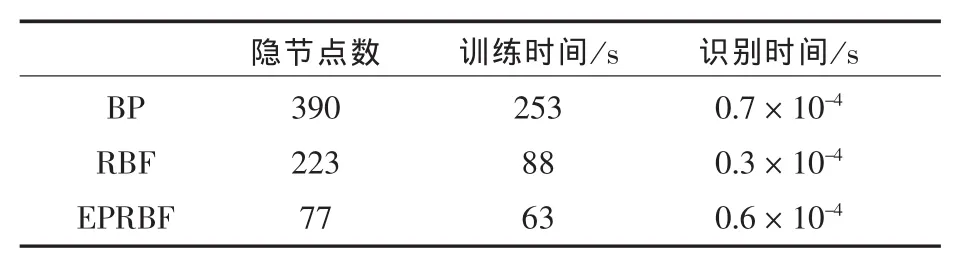
表1 不同網絡需要的隱層節(jié)點數(shù)目、訓練時間和識別時間比較
由表1可以看出,在同樣的精度要求下,BP網絡的結構是最復雜的,需要的隱層節(jié)點的數(shù)目非常多,網絡訓練和識別所需要的時間也很長。EPRBF網絡的結構最簡單,隱層節(jié)點數(shù)目最少,訓練需要的時間也最少,但識別一個樣本需要的時間則介于RBF網絡和BP之間。
使用不同的神經網絡分類器對各類艦船輻射噪聲進行分類,神經網絡的輸入均為基于Dopplerlet變換的艦船輻射噪聲特征矢量,不同神經網絡分類器的分類識別結果如表2所示。
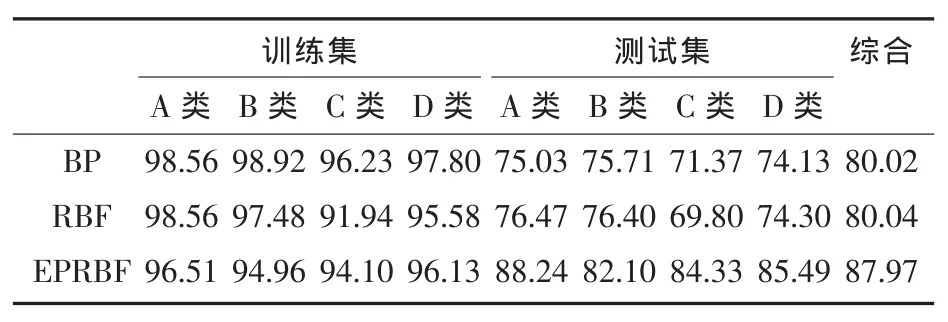
表2 不同神經網絡分類器的識別結果(%)
由表2可以看出,EPRBF神經網絡分類器對訓練集的分類效果比不上BP網絡分類器和RBF網絡分類器,但是對測試集的分類效果要明顯好于其他的網絡,而且總體的識別效果有較大的提高。將訓練集和測試集的次序打亂,重新選擇訓練集和測試集對神經網絡的識別效果進行測試,依然得到類似表2的結論。
由于訓練樣本的不完備性,對于一種實用的、可以長期工作的神經網絡分類器而言,在其工作期間必然遇見一些訓練中未曾學習過的樣本,因此神經網絡分類器必須具有在線學習能力。顯然在海上調動實船做神經網絡分類器的在線學習試驗是效果最好和最有說服力的,但也是非常難以實現(xiàn)的,因此,本文中通過下述方法來模擬神經網絡分類器接收到一個未曾訓練過的類型船舶噪聲的識別過程。
1)重新選擇訓練集,在原有的1 132個訓練樣本集中剔除掉四種類型艦船和一種海況下的海洋環(huán)境噪聲,四種類型艦船中三種為A類目標,一種為C類目標(18個樣本),其中A類目標分別為某型驅逐艦(30個樣本)、某型護衛(wèi)艦(25個樣本)和某型導彈快艇(27個樣本),因此新組成的訓練集共包含1 032個樣本;
2)重新構筑網絡,并使用重新選擇后的訓練樣本集對BP網絡分類器、RBF網絡分類器和EPRBF網絡分類器重新進行訓練;
3)重新選擇測試集,新的測試集包含三部分樣本,一部分是從原有的訓練集中剔除出來的網絡分類器未曾學習過類型艦船的特征矢量樣本,共計100個。另外一部分是從原有的測試集中挑選出來的網絡分類器未曾學習過類型艦船的特征矢量樣本,共計413個。最后一部分則是從原有的測試集中挑選出來的網絡分類器曾經學習過類型艦船的特征矢量樣本1 337個,因此,新組成的測試集共包含1 840個樣本;
4)確定測試樣本的輸入順序,在本文中使用這樣的次序來對網絡在線學習能力進行測試。首先輸入一些網絡學習過的樣本,然后輸入一些網絡未曾學習過的樣本,再輸入網絡學習過的樣本,這樣交替進行;
5)測試。
三種網絡對于未曾學習過的樣本識別能力(即在線學習能力)的比較如表3所示。
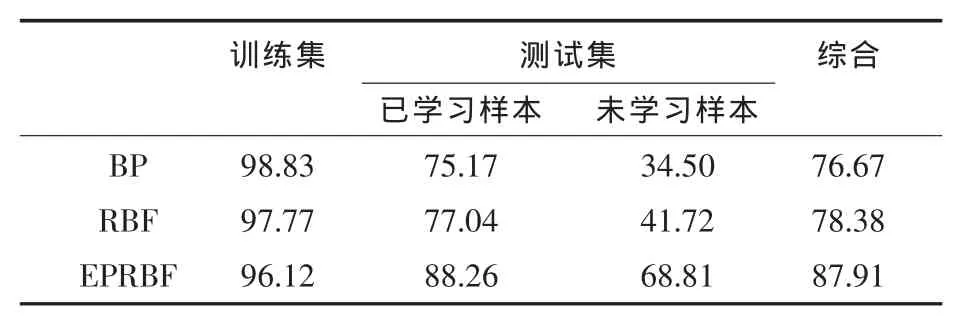
表3 不同神經網絡在線學習能力(%)
從表3可以看出,對于一個未曾學習過的艦船類型,EPRBF網絡能夠很快地掌握它的特征,并記憶在隱層節(jié)點中,在以后的識別中加以利用,顯然其他兩種網絡幾乎不具有在線的學習能力,對于未曾訓練過的樣本,識別能力都比較差。
5 結論
神經網絡分類器在艦船輻射噪聲分類中得到了廣泛的應用。針對神經網絡分類器的設計困難,本文提出了一種基于進化規(guī)劃算法的設計方法。使用該方法對RBF神經網絡分類器的結構進行了設計,使用設計后得到的RBF神經網絡分類器分別進行了離線測試和在線測試。測試結構表明使用該方法設計的神經網絡分類器不僅具有良好的離線識別能力,而且均有良好的在線識別能力。
[1]BARAN R H,COUGHLINJ P.A neural network for passive acoustic discrimination between surface and submarine target[J].Proceeding of SPIE,1991,1471(164):323-332.
[2]SHEPPARD C P,GENT C R.A neural network based sonar classification system[C]//Undersea Defence Technology Conference and Exhibition,1992:628-633.
[3]RUSSO A.Constrained feedforward neural network ensembles for recognition of sonar signals using shape[C]//Undersea Defence Technology Conference and Exhibition,1992:622-627.
[4]GORMAN R P,SEJNOWSKI T J.Learned classification of sonar target using a massively parallel network[J].IEEE Transc.ASSP,1988,36(7):1135-1140.
[5]張艷寧,焦李成,靳云姬,等.一種基于自適應高斯神經網絡的船舶噪聲分類方法[J].聲學學報,1998,23(4):349-356.
[6]方世良,陸佶人.復合基函數(shù)神經網絡在水聲目標識別中的應用[J].聲學技術,1998,17(2):54-62.
[7]方世良.一種應用于水聲目標識別的隱層結構自適應網絡[J].東南大學學報,1999,29(3):89-94.
[8]方世良.一個聚類數(shù)動態(tài)可調的水聲信號聚類算法[J]. 1996,21(4):525-530.
[9]GROSSBERG S.Compectitive learning:from interactive activation to adaptive resonance[J].Cognitive Science,1987,11(1):23-63.
[10]王向軍,向東,蔣濤,等.一種雙群進化規(guī)劃算法[J].計算機學報,2006,29(5):835-839.
[11]DERICHE M,TEWFIK A H.Maximum likelihood estimation of the parameters of discrete fractionally differenced Gaussian noise process[J].IEEE Trans.On Signal Processing,1993,41(10):2977-2989.
[12]KALPLAN L M,KUO C C J.Fractal estimation from noisy data via discrete fractional Gaussian noise(DFGN)and the Harr basis[J].IEEE Trans.On Signal Processing,1993,41(2):3554-3562.
Classification of Ship Radiation Noise Using Evolutionary Algorithm
Ding Yong-zhong1Fang Xing2
1 Naval Representative Office at No.872 Manufactory,Xian 710065,China 2 Naval Representative Office at No.709 Research Institude,Wuhan 430070,China
Neural network classifier is widely used in ship radiation noise classification.According to the design difficulty of neural network classifier,an approach using evolutionary programming is proposed in the paper.Fitness function of evolutionary algorithm is not the classification rate of neural network but the combination of decentralization and conglomeration,then both the training set classification rate and testing set classification rate of neural network are high.Using this method,the neural network can learn online and offline.Ship radiation noise identification experiment using this neural network is done,and experiment results show that the neural network classifier using evolutionary programming has good performance.
neural network;evolutionary algorithm;classifier;warship radiation noise
U666;TP18
A
1673-3185(2009)04-47-05
2009-05-07
丁永忠(1970-),男,工程師,碩士。研究方向:魚雷制導與控制。E-mail:dingyongzhong@qq.com
方 興(1974-),男,工程師,碩士。研究方向:數(shù)字信息處理