基于擴散體的無透鏡成像系統及其分辨率分析
2025-01-19 00:00:00劉明昊
物聯網技術 2025年2期
關鍵詞:物聯網
摘 要:無鏡頭成像是一種以計算取代鏡頭的新興成像技術,有望在低成本便攜式物聯網視覺終端系統中獲得廣泛應用。針對擴散體無鏡頭系統成像性能評估工作不足的問題,搭建了基于擴散體的無鏡頭成像系統,探究了該系統成像模型,使用直接測量法測量了不同條件下該系統的點擴散函數,分析其自相關函數的半高全寬和空間頻率響應,評估該系統的成像性能和分辨率。實驗結果表明,該系統SFR測量值約為0.030 cycles/pixel,重構圖像的峰值信噪比(PSNR)超過12 dB,成像性能良好。
關鍵詞:物聯網;無鏡頭成像;點擴散函數;直接測量法;擴散體;分辨率
中圖分類號:TP391 文獻標識碼:A 文章編號:2095-1302(2025)02-00-03
0 引 言
在過去的幾個世紀,透鏡的出現大大推動了成像技術的發展,然而,可穿戴設備、植入式設備、機器人、物聯網、虛擬/增強現實和人機交互正在推動相機向著小型化發展,但透鏡的使用增加了這些設備的重量和成本。
無鏡頭成像設備中不配置透鏡,而是在場景和圖像傳感器之間放置光學調制器,場景光經過光學調制器調制后,圖像傳感器采集圖像數據,然后使用特定的算法進行圖像重建[1]。
擴散體無鏡頭成像系統的性能可以通過在單點光源照射時的響應來表征[2]。這種響應稱為點擴散函數(Point Spread Function, PSF)。系統PSF可以被用來評估成像系統的圖像質量,通過分析PSF的特征,可以了解成像系統的分辨率、模糊度、畸變程度等性能指標。
在實際系統成像過程中,由于光學衍射效應、外界噪聲等因素的干擾,理論計算得到的點擴散函數與實際系統的輸出響應不符。因此,通常需要根據實際系統中的輸出響應對成像模型中的點擴散函數進行調整,以獲得較好的成像結果,從實際系統中獲得輸出響應的過程,也稱為點擴散函數的測量。現如今測量PSF的方法大致可以分為3類:使用自然場景圖像的盲PSF估計[3-5]、使用校準模式的非盲PSF估計[6-8]和使用點狀源直接測量PSF[9-12]。文獻[5]假設檢測到的模糊邊緣是模糊之前的階躍邊緣,并且使用一對預測圖像和模糊圖像來估計PSF。文獻[3]提出了另一種基于邊緣的方法,該方法使用潛在清晰圖像邊緣的先驗補丁來估計PSF。非盲PSF估計方法使用校準圖案作為輸入圖像來估計PSF[6-8]。文獻[5]使用具有最大后驗技術的貝葉斯框架來估計PSF。文獻[7]設計了一種每個塊中都有源泉的棋盤測試圖,然后通過解決最小二乘問題來估計PSF。文獻[8]使用隨機噪聲目標來估計PSF。非盲PSF估計技術通常假設空間不變PSF,因此不適合空間可變PSF圖像系統。PSF直接測量方法通常使用點狀源和特定光學儀器來獲取PSF[9-12],這種方法可以克服測量空間變化PSF的弱點。文獻[12]使用液晶顯示器(LCD)生成點陣圖案來測量不同相機區域的PSF。文獻[9]提出了一種采用準直氦氖激光器作為放置在無窮遠處的點光源進行高信噪比PSF測量的方法。文獻[11]使用虛擬點狀源實現了子像素PSF的測量。直接測量法更為方便快速,同時更能反映成像模型與實際系統之間的誤差。
本文設計了一種基于FPGA硬件平臺的擴散體無鏡頭相機,并且對該系統的PSF進行了測試評估,進而分析了該系統的成像性能和分辨率。
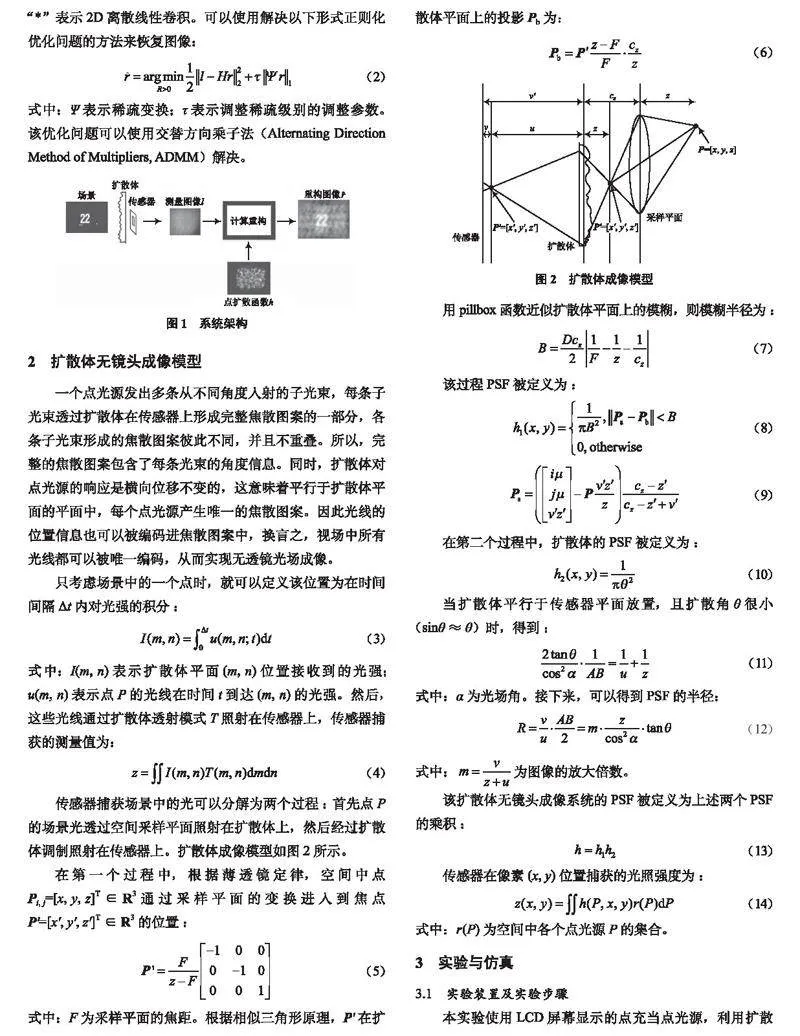
1 擴散體無鏡頭成像系統架構
擴散體的無鏡頭成像系統由一個光學傳感器、一個擴散體和計算單元組成[13]。本文使用的擴散體是一個較薄的透明相位板,視場中非相干點光源透過該擴散體在傳感器上生成偽隨機焦散圖案h作為PSF,將焦散圖案存儲到FPGA內存中后,使用傳感器采集場景圖像獲得測量數據l,利用焦散圖案和場景圖像數據在FPGA中完成圖像重構。系統架構如圖1所示。
本文將場景建模為具有不同顏色和強度的點光源的集合。假設所有場景中所有點彼此獨立,傳感器測量值l可以描述為:
(1)
式中:h表示系統PSF;r表示場景;(m, n)表示傳感器坐標;“*”表示2D離散線性卷積。可以使用解決以下形式正則化優化問題的方法來恢復圖像:
(2)
式中:Ψ表示稀疏變換;τ表示調整稀疏級別的調整參數。該優化問題可以使用交替方向乘子法(Alternating Direction Method of Multipliers, ADMM)解決。
2 擴散體無鏡頭成像模型
一個點光源發出多條從不同角度入射的子光束,每條子光束透過擴散體在傳感器上形成完整焦散圖案的一部分,各條子光束形成的焦散圖案彼此不同,并且不重疊。所以,完整的焦散圖案包含了每條光束的角度信息。同時,擴散體對點光源的響應是橫向位移不變的,這意味著平行于擴散體平面的平面中,每個點光源產生唯一的焦散圖案。因此光線的位置信息也可以被編碼進焦散圖案中,換言之,視場中所有光線都可以被唯一編碼,從而實現無透鏡光場成像。
只考慮場景中的一個點時,就可以定義該位置為在時間間隔Δt內對光強的積分:
(3)
式中:I(m, n)表示擴散體平面(m, n)位置接收到的光強;u(m, n)表示點P的光線在時間t到達(m, n)的光強。然后,這些光線通過擴散體透射模式T照射在傳感器上,傳感器捕獲的測量值為:
(4)
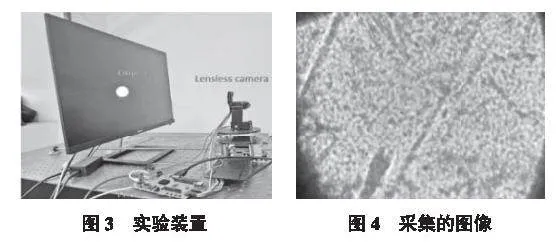
傳感器捕獲場景中的光可以分解為兩個過程:首先點P的場景光透過空間采樣平面照射在擴散體上,然后經過擴散體調制照射在傳感器上。擴散體成像模型如圖2所示。
在第一個過程中,根據薄透鏡定律,空間中點
Pi, j=[x, y, z]T∈R3通過采樣平面的變換進入到焦點
P'=[x', y', z']T∈R3的位置:
(5)
式中:F為采樣平面的焦距。根據相似三角形原理,P'在擴散體平面上的投影Pb為:
(6)
用pillbox函數近似擴散體平面上的模糊,則模糊半徑為:
(7)
該過程PSF被定義為:
(8)
(9)
在第二個過程中,擴散體的PSF被定義為:
(10)
當擴散體平行于傳感器平面放置,且擴散角θ很小(sinθ≈θ)時,得到:
(11)
式中:α為光場角。接下來,可以得到PSF的半徑:
(12)
式中:為圖像的放大倍數。
該擴散體無鏡頭成像系統的PSF被定義為上述兩個PSF的乘積:
(13)
傳感器在像素(x, y)位置捕獲的光照強度為:
(14)
式中:r(P)為空間中各個點光源P的集合。
3 實驗與仿真
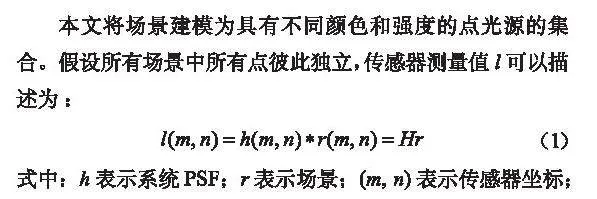
3.1 實驗裝置及實驗步驟
本實驗使用LCD屏幕顯示的點充當點光源,利用擴散體、黑色孔徑板和除掉鏡頭的OV5640圖像傳感器獲取點光源的焦散圖案。其中孔徑板為外寬2 cm、內寬0.2 cm的黑色正方形紙板,圖像傳感器的有效像素個數為2 592×1 944,像素尺寸為1.4×1.4,傳感器尺寸為4 mm。實驗裝置如圖3所示。
本實驗旨在探尋該系統成像性能以及點光源與傳感器距離對PSF的影響,具體實驗步驟如下:
(1)將LCD屏幕同軸放置在傳感器前,使屏幕與傳感器的距離D=10 cm,在屏幕上顯示S=100 pixel的點光源;
(2)捕獲傳感器上顯示的焦散圖案,保存在計算機上;
(3)捕獲場景圖像經過擴散體采集的原始數據;
(4)使用ADMM算法重構點光源圖像;
(5)使用MATLAB計算點光源和重構點光源的自相關系數和重構圖像的SFR;
(6)改變LCD屏幕與傳感器距離,重復上述步驟。
3.2 實驗結果及分析
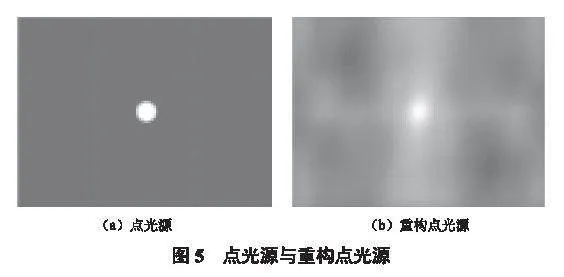
首先測試系統重構點光源的能力。使用的點光源大小為100 pixel,距離為5 cm時,采集的圖像如圖4所示。其可以作為無鏡頭系統中的點擴散函數h,也可以作為傳感器測量值l。
利用采集到的PSF作為測量值l,使用ADMM算法重構點光源圖像,點光源與重構點光源如圖5所示。
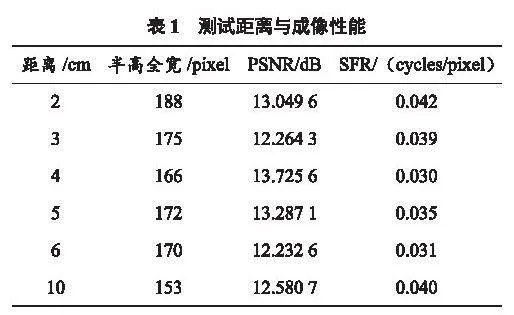
計算距離為5 cm時,重構點光源與原圖像的PSNR為13.287 1。利用原點光源圖像和重構點光源圖像自相關函數計算可知,其半高全寬為172 pixel,重構點光源的SFR測量值為0.035 cycles/pixel。
對距離為2 cm、3 cm、4 cm、5 cm、6 cm、10 cm的點光源按上述步驟進行測量,測試距離與成像性能見表1。
實驗結果表明,該系統在近距離條件下有著較為良好的成像性能,系統半高全寬約為170 pixel,SFR約為0.030 cycles/pixel,成像PSNR超過12 dB。
4 結 語
本文探究了基于擴散體的無鏡頭成像系統的成像模型,搭建了成像系統平臺,測試了不同條件下系統點擴散函數的成像性能,評估了擴散體無鏡頭成像系統的分辨率大小。實驗結果表明,該系統點擴散函數采集距離為4 cm時成像性能最佳,PSNR接近14 dB,系統SFR測量值在0.030 cycles/pixel左右,有著良好的成像效果。但是該系統成像性能還有很大提升空間,可以在本文基礎上加入圖像信號處理系統,對采集的PSF信號做優化處理,再進行圖像重構,以達到更好的成像效果。
參考文獻
[1] BOOMINATHAN V, ROBINSON J T, WALLER L, et al. Recent advances in lensless imaging [J]. Optica, 2022, 9(1): 1-16.
[2] JIANG H Z, LIU Y C, LI X D, et al. Point spread function measurement based on single-pixel imaging [J]. IEEE photonics journal, 2018, 10(6): 1-15.
[3] SUN L B, CHO S H, WANG J, et al. Edge-based blur kernel estimation using patch priors [C]// IEEE International Conference on Computational Photography. Cambridge, MA, USA: IEEE, 2013: 1-8.
[4] CHO T S, PARIS S, HORN B K, et al. Blur kernel estimation using the radon transform [C]// IEEE Conference on Computer Vision and Pattern Recognition. Colorado Springs, CO, USA: IEEE, 2011: 241-248.
[5] JOSHI N, SZELISKI R, KRIEGMAN D J. PSF estimation using sharp edge prediction [C]// IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK, USA: IEEE, 2008: 1-8.
[6] MOSLEH A, GREEN P, ONZON E, et al. Camera intrinsic blur kernel estimation: a reliable framework [C]// IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015: 4961-4968.
[7] KEE E, PARIS S, CHEN S, et al. Modeling and removing spatially-varying optical blur [C]// IEEE International Conference on Computational Photography. Pittsburgh, PA: IEEE, 2011: 1-8.
[8] BRAUERS J, SEILER C, AACH T. Direct PSF estimation using a random noise target [J]. Proceedings of SPIE, 2010, 7537(75370B).
[9] DU H, VOSS K J. Effects of point-spread function on calibration and radiometric accuracy of CCD camera [J]. Applied optics, 2004, 43(3): 665-670.
[10] LEHR J, SIBARITA J B, CHASSERY J M. Image restoration in X-ray microscopy: PSF determination and biological applications [J]. IEEE transactions on image processing, 1998, 7(2): 258-263.
[11] JEMEC J, PERNU S F, LIKAR B, et al. 2D sub-pixel point spread function measurement using a virtual point-like source [J]. International journal of computer vision, 2017, 121(3): 391-402.
[12] NAVAS-MOYA F A, NIEVES J L, VALERO E M, et al. Measurement of the optical transfer function using a white-dot pattern presented on a liquid-crystal display [J]. Journal of the European optical society rapid publications, 2013, 8(13029).
[13] CAI Z W, CHEN J W, GIANCARLO P, et al. Lensless light-field imaging through diffuser encoding [J]. Light: science amp; applications, 2020, 9(5): 1392-1400.
作者簡介:劉明昊(1998—),男,廣東深圳人,碩士,研究方向為計算成像。
收稿日期:2024-01-18 修回日期:2024-03-06
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
