基于物聯網技術的高壓輸電電纜故障定位方法
2025-01-19 00:00:00徐研陳文教胡成樂賁成
物聯網技術 2025年2期
關鍵詞:物聯網技術

摘 要:高壓輸電電纜周圍環境復雜,存在多種干擾因素,影響故障定位的準確性。因此,提出基于物聯網技術的高壓輸電電纜故障定位方法。利用物聯網技術對電纜零序電壓、電流信號進行監測,對故障信號進行識別、采集、傳輸,采用小波變換技術對監測信號進行濾波處理,之后利用行波測距理論確定發生電纜故障的地理位置,實現基于物聯網技術的高壓輸電電纜故障定位。實驗證明,所提方法定位結果與實際故障地理位置基本一致,最大定位誤差為0.02 m,基本可以實現對高壓輸電電纜故障的精準定位。
關鍵詞:物聯網技術;高壓輸電電纜;故障定位;小波變換技術;行波測距理論;電纜零序電壓;電流信號
中圖分類號:TP39;TM77 文獻標識碼:A 文章編號:2095-1302(2025)02-00-03
0 引 言
高壓輸電電纜作為電力傳輸的重要載體,由于受到環境、設備老化、人為破壞等原因影響,在運行過程中可能會出現各種故障,如斷線、短路等,這些故障如不能及時定位并修復,將可能引發更大的電力事故[1],對人們的生產生活造成嚴重影響。因此,如何快速、準確地定位高壓輸電電纜的故障位置,成為電力行業面臨的重要問題。
文獻[2]建立了電力電纜分布參數模型,利用希爾伯特變換獲取包絡參數,實施歸一化處理后,采用8階巴特沃斯帶通濾波器濾除噪聲干擾,完成故障定位。文獻[3]通過補充集合經驗模態分解方法分解反射系數譜,結合加努塔爾-布萊克曼混合卷積窗獲取故障電纜的定位曲線。但上述2種方法的故障定位需要通過離線數據處理和相應運算來獲得結果,不具備實時監測能力。
為此,本文提出基于物聯網技術的高壓輸電電纜故障定位方法,為電纜故障定位實踐提供參考依據。
1 基于物聯網技術的電纜監測
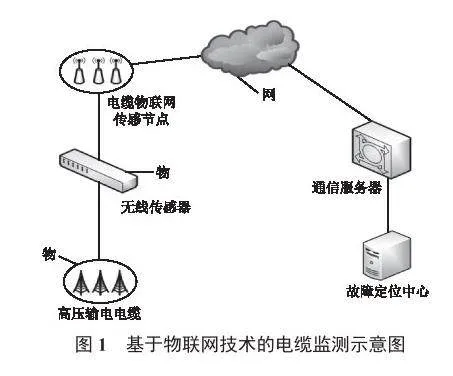
當電纜出現故障時,在故障點會產生行波電流,且電網三相電壓不再對稱,各線路中將出現零序電流和零序電壓。行波電流會沿著電纜傳播,并在傳播過程中產生一系列的物理效應和電氣效應,通過對這些效應的測量和分析,可以確定故障的位置。因此,對電纜零序電源信號進行采集與監測,是及時發現并解決故障的前提。本文采用物聯網技術對電纜中的零序電壓與零序電流進行監測,實現對電纜故障信號的同步采集。基于物聯網技術的電纜監測示意圖如圖1所示。
如圖1所示,在一條高壓輸電電纜線路上設置若干個監測點,每個監測點上安裝一臺無線傳感器,把一條高壓輸電電纜線路分成若干段。各監測點對高壓輸電電纜的零序信號進行同步采集與相應的數學運算,從而得到高壓輸電電纜的運行狀況。每個感知節點通常處于休息狀態,即在判定高壓輸電電纜是正常狀態的情況下,不會主動將高壓輸電電纜信息傳送到故障定位中心服務器。零序電壓無線網感知節點在判定電纜零序電壓上升并超出閾值的情況下,將告警信息自動發送到故障定位中心服務器[4]。在接收到故障警報后,故障定位中心服務器開啟各電流物聯網感知節點電源,通過對高壓輸電電纜各支路的零序電流數據進行實時匯總,得到豐富的電纜狀態信息。
考慮到物聯網感知節點需要完成電纜零序電壓、電流信號采集,數據分析計算,廣域時間同步和數據通信,根據該需求,此次選用的傳感器為IYHFA-A4F8A無線傳感器,IYHFA-A4F8A無線傳感器芯片基于ARM Cortex-M5內核,處理速度快[5]。采用串并聯的方式將無線傳感器接入到輸電電纜總線上,并根據實際情況對無線傳感器的參數進行設定,包括信號感知周期、頻率等[6]。任何故障定位都必須要有數據的輸入,而且是在可接受范圍內的輸入。電纜故障定位過程中,輸入信號為電纜中的故障信號,因此需要識別電纜中的故障信號。在IYHFA-A4F8A無線傳感器中設定一個閾值,將閾值與電纜中的零序電壓信號進行對比,識別電纜狀態,其用式(1)表示為:
(1)
式中:R表示高壓輸電電纜狀態的識別結果;0表示正常狀態;1表示故障狀態;u表示電纜中的零序電壓;表示閾值[7]。
如式(1)所示,當識別結果為電纜處于故障狀態時,由故障定位中心服務器驅動零序電流物聯網感知節點,采集電纜中的零序電流信號,并將數據通過GPRS網絡傳輸到故障定位中心服務器上。
GPRS網絡通信是物聯網技術中的關鍵,GPRS網絡的搭建采用集成化程度較高的KB5060無線數傳模塊。采用標準RS 323接口作為GPRS網絡通信接口,結合實際情況對GPRS網絡的傳輸速率、心跳時間、服務器IP地址等[8]進行配置。完成GPRS網絡配置后,將KB5060無線數傳模塊連接到無線傳感器一號端口,通過一號端口接收與發送故障數據,以實現基于物聯網技術的電纜故障監測。
2 監測數據濾波
物聯網技術雖然能夠實現對電纜故障信號的采集與傳輸,但是物聯網感知節點在采集故障信號過程中很容易受到外界因素的干擾。為了保證后續電纜故障的定位精度,采用小波變換技術對監測數據進行濾波處理。在待濾波信號的時間域上加一個窗口函數,利用窗口函數對監測信號進行乘積運算,實現對窗口內小波的傅里葉變換,其用式(2)表示為:
(2)
式中:S(w, t)表示傅里葉變換后的電纜故障監測信號;x表示原始監測信號;g(t)表示窗口函數;t表示信號采樣時間;ε表示電纜故障信號頻率;j表示窗口內故障信號序列長度;w表示電纜故障信號幅值[9]。窗口函數作為光滑低通函數,通過對窗中信號頻率成分的幅值進行檢測,獲取一定時間點附近的故障信號的頻率信息,并對其進行傅里葉變換,以改善窗中故障信號的時間分辨能力,從而減小故障信號的頻率分辨率,起到對窗內故障信號時間和頻率分辨率的制約作用。通過對不同頻率的故障信號時頻窗口進行自動調節,實現對故障信號的小波變換處理,其用式(3)表示為:
(3)
式中:W(a, b)表示小波變換后的電纜故障信號;a表示尺度因子;b表示移動因子;ψ表示小波基函數。通過對電纜故障信號進行小波變換處理,將信號時域與頻域做局部化處理,以此濾除原始故障信號中的噪聲分量,實現對監測數據的濾波處理。
3 輸電電纜故障定位
在實際應用中,高壓輸電電纜本身的特點決定了它并非是純阻性的,而是含有雜散電感和雜散電容,所以在發生故障時,電纜中的電流、電壓會發生改變,但這種改變不會立即在高壓輸電電纜線路的其他部位出現,而是會以突變點為原點,以電磁波的形式向高壓輸電電纜線路的其他部位傳播,其中電磁波稱為行波。簡而言之,在高壓輸電電纜中,如果阻抗是連續的,那么行波就不會發生折射或反射,而當高壓輸電電纜發生故障時,以某一速度傳播的行波將會發生折射或反射,通過接收到的反射波的傳播時間以及傳播速度,就能對高壓輸電電纜故障的位置進行推算。因此在監測數據濾波的基礎上,利用行波測距理論確定電纜故障位置。假設高壓輸電電纜故障點為電流信號的突變點,故障電纜產生的零序電流沿著線路傳輸,從而產生行波并向故障點傳播,當行波達到故障點時發生反射,被無線傳感器接收,無線傳感器發送與接收行波信號之間存在時間差,可通過時間差與信號的傳播速度計算故障點到無線傳感器的距離,其用式(4)表示為:
(4)
式中:L表示電纜故障點與監測點的距離;t1、t2分別表示監測點發送信號與接收信號的時刻;v表示零序電流信號在高壓輸電電纜中的傳播速度[10]。由此即可定位到輸電電纜故障的位置,實現基于物聯網技術的高壓輸電電纜故障定位。
4 實驗論證
4.1 實驗準備與設計
根據研究需求,將本文方法應用在某高壓電網輸電電纜線路上,該輸電站的電壓為220 kV,對應電纜為典型的高壓輸電電纜,線路長度為5 645.05 m,線芯材質為裸銅線,截面形狀為圓形,截面面積為1.65 mm2,芯數為5芯,交流額定電壓為1 kV。該高壓輸電電纜所在區域環境比較惡劣,且電纜使用時間比較長,距今已經使用2年,部分線路遭到動物啃食、人為破壞以及雨水侵蝕,經常發生故障。利用本文方法對該高壓輸電電纜故障進行定位,根據該輸電電纜的實際情況,在電纜上安裝了5臺無線傳感器,布設了5個物聯網傳感節點,用于監測高壓輸電電纜的運行數據,并將監測數據上傳到物聯網監測平臺上,將本文方法嵌入到該平臺上,實現對高壓輸電電纜故障信號遠程感知設備的控制以及故障實時定位等功能。在方法應用過程中,物聯網平臺與無線傳感器建立TCP/IP連接,對無線傳感器技術參數進行設定,遠程啟動無線傳感器設備,并且接收傳感器設備反饋的故障信號。通過對故障信號的處理與分析,測量高壓輸電電纜故障處和監測點間的距離,實現對電纜故障的定位。
4.2 實驗結果與討論
本次實驗共定位了50個電纜故障點,為驗證所提的方法,隨機選取8個故障定位結果,將文獻[2]和文獻[3]的方法與本文方法進行對比。高壓輸電電纜故障定位結果見表1。
從表1可以看出,本文方法對于電纜故障定位結果與實際故障位置基本一致,最大定位誤差為0.02 m,基本可以忽略不計;而文獻[2]方法對于電纜故障定位結果與實際差距較大,最大誤差為44 m;文獻[3]方法的故障定位最大誤差將近45 m。2種主流方法的故障定位誤差遠遠大于本文方法。通過對比與分析以上實驗數據,證明了本文方法對于高壓輸電電纜故障定位具有強大的數據分析能力和空間定位優勢,且定位的準確度比較高,具有良好的可行性與實用性。
5 結 語
通過使用物聯網技術,本文實現了對高壓輸電電纜的實時監測和數據分析,從而更快速、準確地定位故障位置。通過實際應用,發現基于物聯網技術的高壓輸電電纜故障定位方法具有較高的準確性和可靠性。該方法能夠實現對高壓輸電電纜的實時監測和數據分析,從而更快速、準確地定位故障位置。同時,該方法還具有較高的靈活性和可擴展性,可以適應不同的應用場景,滿足不同的需求。
參考文獻
[1]劉杰.基于改進雙端行波法的特高壓輸電線路故障定位方法研究[J].東北電力技術,2023,44(6):11-15.
[2]吳吉,唐作鑫,彭向陽,等.基于TFDR波形時域包絡線的電纜故障定位技術[J].南方電網技術,2023,17(12):18-27.
[3]溫才權,韋鑫,王杰,等.基于CEEMD-PSD算法的變電站控制電纜故障定位方法[J].電網與清潔能源,2023,39(7):80-89.
[4]宋柯,王樂寧,唐詩,等.基于行波互相關法的電力電纜故障定位技術及應用[J].水電能源科學,2023,41(7):213-217.
[5]梁鐘穎,周凱,孟鵬飛,等.基于頻域反射系數譜的電纜故障定位與故障類型識別方法研究[J].電工電能新技術,2022,41(8):79-88.
[6]謝子殿,符爽.基于VMD-TEO的礦用高壓動力電纜故障定位方法[J].黑龍江科技大學學報,2021,31(5):613-618.
[7]王小星.基于暫態行波的鐵路電力電纜故障定位系統設計與實現[J].自動化技術與應用,2021,40(5):28-31.
[8]王瑤瑤,姚周飛,謝偉,等.基于時頻域反射法的高溫超導電纜故障定位研究[J].中國電機工程學報,2021,41(5):1540-1547.
[9]趙尊慧,孫廷璽,鄭柒拾,等.基于脈沖差分的高壓電纜故障定位方法及設備研究[J].電測與儀表,2020,57(8):64-69.
[10]賓世楊,林麗娟,程樂,等.基于分布式光纖傳感技術的電纜故障定位技術開發及應用研究[J].電力設備管理,2020(3):147-149.
作者簡介:徐 研(1985—),男,吉林長春人,碩士,高級工程師,研究方向為輸電線路運維。
陳文教(1984—),男,廣東韶關人,高級工程師,研究方向為高壓電纜運維。
胡成樂(1987—),男,湖北武漢人,工程師,研究方向為輸電線路運維。
賁 成(1993—),男,湖北宜昌人,碩士,工程師,研究方向為輸電線路運維。
收稿日期:2024-01-18 修回日期:2024-02-29
基金項目:廣東電網廣州供電局輸電類科技項目(GDKJXM20222 320)
猜你喜歡
電子技術與軟件工程(2016年20期)2016-12-21 09:37:17
電子技術與軟件工程(2016年19期)2016-12-19 17:21:51
電子技術與軟件工程(2016年19期)2016-12-19 17:16:19
電子技術與軟件工程(2016年19期)2016-12-19 17:15:35
電腦知識與技術(2016年27期)2016-12-15 18:27:52
中國市場(2016年32期)2016-12-06 11:53:37
商情(2016年40期)2016-11-28 11:05:43
中國市場(2016年41期)2016-11-28 05:39:01
商情(2016年39期)2016-11-21 08:47:03
中小企業管理與科技·下旬刊(2016年10期)2016-11-18 20:58:27
