特高拱壩無人機(jī)巡檢航跡規(guī)劃方法
2024-12-28 00:00:00陳衍昌唐爐亮趙紫龍余意
水利水電快報(bào) 2024年12期
關(guān)鍵詞:無人機(jī)




摘要:由于傳統(tǒng)高空懸掛方式下的壩面檢查存在效率低、安全風(fēng)險(xiǎn)大等問題,常規(guī)的無人機(jī)航跡規(guī)劃方法無法滿足雙曲結(jié)構(gòu)的特高拱壩巡檢要求。對(duì)此,提出了一種針對(duì)特高拱壩的無人機(jī)巡檢航跡規(guī)劃新方法,并將該方法應(yīng)用于云南省小灣水電站。首先,構(gòu)建拱壩函數(shù)模型,再依據(jù)相機(jī)參數(shù)及航攝要求確定各項(xiàng)航空攝影參數(shù),計(jì)算出攝影航跡點(diǎn),然后對(duì)航跡點(diǎn)進(jìn)行坐標(biāo)換算,最后根據(jù)實(shí)地情況對(duì)航跡點(diǎn)做范圍劃定并分配無人機(jī)群作業(yè)架次。結(jié)果表明:基于本航跡規(guī)劃方法所采集的無人機(jī)影像可以做到完整覆蓋壩面,所獲取的影像質(zhì)量高,滿足后期數(shù)據(jù)處理要求。研究成果可為流域安全監(jiān)測(cè)提供技術(shù)支撐和為類似大型復(fù)雜結(jié)構(gòu)作業(yè)場景提供航跡規(guī)劃新思路。
關(guān)鍵詞:安全監(jiān)測(cè); 智能巡檢; 航跡規(guī)劃; 特高拱壩; 無人機(jī); 小灣水電站
中圖法分類號(hào):TV642;TV698.1
文獻(xiàn)標(biāo)志碼:A
DOI:10.15974/j.cnki.slsdkb.2024.12.016
文章編號(hào):1006-0081(2024)12-0089-06
0 引 言
對(duì)于特高拱壩,采用傳統(tǒng)高空懸垂作業(yè)方式開展壩面檢查,存在著周期長、效率低、準(zhǔn)確性差、費(fèi)用高、距離壩面遠(yuǎn)、安全風(fēng)險(xiǎn)大等問題[1-2]。近年來,機(jī)器人、無人機(jī)等技術(shù)的迅速發(fā)展為各類復(fù)雜環(huán)境巡檢提供了新的可能[3-4]。在電力巡檢、城市車道線提取、大壩安全監(jiān)測(cè)等眾多領(lǐng)域,無人機(jī)已經(jīng)展示出其優(yōu)勢(shì)[5-9]。然而,一些不規(guī)則拱壩給無人機(jī)航跡規(guī)劃帶來了新的挑戰(zhàn)。以瀾滄江小灣水電站拱壩為例,其特殊的雙曲面結(jié)構(gòu)特高拱壩,使現(xiàn)有的航跡規(guī)劃算法很難應(yīng)用于實(shí)際作業(yè)中[10]。此外,對(duì)于無人機(jī)群協(xié)同作業(yè),特別是自動(dòng)化巡檢方面,仍有待進(jìn)一步深入研究[11]。
針對(duì)上述問題,本文提出一種針對(duì)特高拱壩的無人機(jī)巡檢航跡規(guī)劃新方法。首先構(gòu)建拱壩函數(shù)模型,在確認(rèn)各項(xiàng)航空攝影參數(shù)后,再計(jì)算出拱壩各區(qū)域攝影航跡點(diǎn),然后對(duì)航跡點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,最后結(jié)合實(shí)地情況做航跡點(diǎn)范圍劃定和無人機(jī)群作業(yè)架次分配。該方法可以解決目前技術(shù)不適用于雙曲型拱壩、不支持多架次無人機(jī)航跡規(guī)劃等問題,并已成功運(yùn)用于小灣水電站的實(shí)際巡檢作業(yè)中。
1 工程概況與研究方法
瀾滄江水力資源豐富,部署著中國十二大梯級(jí)水電站[12]。其中,小灣水電站是瀾滄江中下游河段梯級(jí)電站的“龍頭水庫”,位于云南省大理州南澗彝族自治縣與臨滄市鳳慶縣交界的瀾滄江中游河段,攔河壩為混凝土雙曲拱壩,為世界首座300 m級(jí)特高拱壩[13]。在長期服役過程中,水位、溫度、時(shí)效、徐變等因素的變化,會(huì)導(dǎo)致拱壩混凝土出現(xiàn)不同程度的裂縫、剝蝕、滲流等缺陷,對(duì)拱壩安全運(yùn)行造成影響[14-15]。因此,定期對(duì)拱壩壩面混凝土進(jìn)行檢測(cè),結(jié)合相關(guān)監(jiān)測(cè)成果綜合分析,對(duì)掌握拱壩運(yùn)行狀態(tài)、確保拱壩安全運(yùn)行至關(guān)重要。
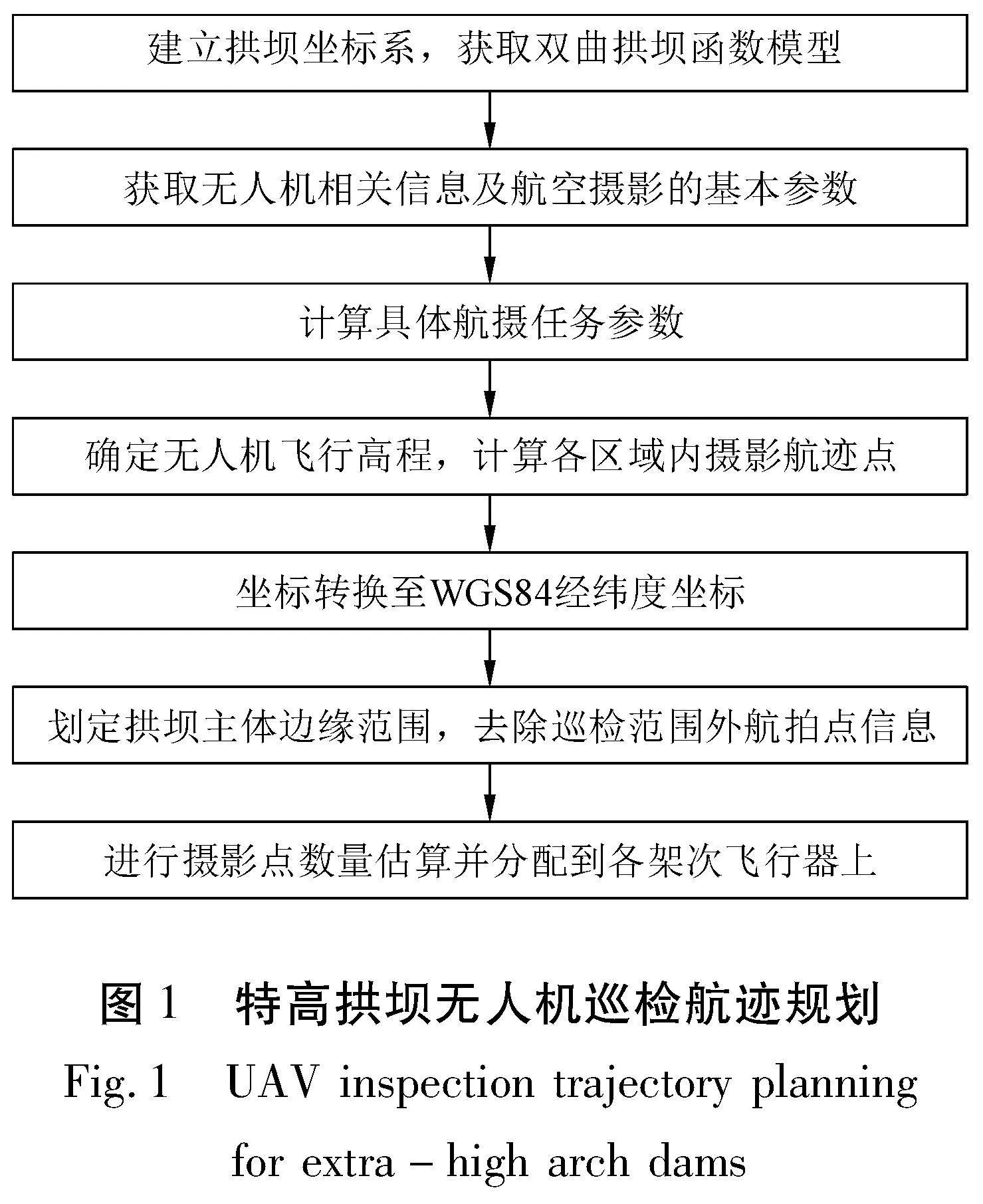
研究技術(shù)流程(圖1)為:① 基于現(xiàn)有拱壩設(shè)計(jì)圖紙,構(gòu)建拱壩函數(shù)模型;② 依據(jù)無人機(jī)和相機(jī)參數(shù)及航空攝影要求,依次確定無人機(jī)作業(yè)高程、攝影基線、拍攝間隔等信息,并據(jù)此計(jì)算拱壩各區(qū)域內(nèi)攝影航跡點(diǎn);③ 將航攝點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,以滿足航跡任務(wù)坐標(biāo)系輸入要求;④ 結(jié)合實(shí)地情況,對(duì)特高拱壩作業(yè)主體進(jìn)行范圍劃定,去除范圍外航攝點(diǎn);⑤ 根據(jù)無人機(jī)續(xù)航時(shí)間及作業(yè)速度,將航攝點(diǎn)盡可能均勻分配到各架次任務(wù)中。
2 航跡規(guī)劃方法
2.1 特高拱壩模型構(gòu)建
穩(wěn)定可靠的拱壩模型是軌跡規(guī)劃的基礎(chǔ)。本研究基于現(xiàn)有雙曲拱壩設(shè)計(jì)圖紙,獲取雙曲拱壩平面坐標(biāo)函數(shù)、拱圈體型參數(shù)(包括拱冠梁厚度、拱端厚度、半中心角、弦長、拱冠曲率半徑)及拱冠梁剖面參數(shù),并對(duì)拱壩整體進(jìn)行分區(qū),構(gòu)建不同區(qū)域內(nèi)拱壩的雙曲函數(shù)模型。以拱壩上游壩面的中心點(diǎn)為坐標(biāo)原點(diǎn),以拱壩下游對(duì)稱軸方向?yàn)閥軸,以與y軸垂直的方向?yàn)閤軸,以壩軸線垂直向下為z軸,建立拱壩坐標(biāo)系。結(jié)合拱壩基本體型圖,考慮到拱壩中部存在泄洪口、導(dǎo)流口等凸起部分,將拱壩的作業(yè)區(qū)域分為拱壩左側(cè)、拱壩右側(cè)及泄洪口所處中部3個(gè)部分,以最外側(cè)泄洪口所在位置為界限劃分,如圖2所示。
2.2 航空攝影參數(shù)確定
在完成特高拱壩函數(shù)模型構(gòu)建后,為使影像數(shù)據(jù)滿足后期數(shù)據(jù)分析要求,需要根據(jù)相機(jī)參數(shù)及航攝要求確定航空攝影參數(shù)。針對(duì)大疆M300無人機(jī)、L1相機(jī)型號(hào)參數(shù)及航空攝影的成像要求,包括成像傳感器大小、焦距、快門速度等相機(jī)參數(shù),期望旁向重疊度、期望航向重疊度、飛行速度、距拱壩主體飛行航距等攝影參數(shù),依次確定相片地面分辨率、航向攝影基線、旁向攝影基線、攝影時(shí)間間隔等信息,具體計(jì)算如下。
依據(jù)相機(jī)傳感器尺寸lx和ly、鏡頭焦距f和距離拱壩主體飛行航距D,可以計(jì)算影像實(shí)際地面范圍dx和dy:
dx=lx×D/f
dy=ly×D/f(1)
結(jié)合相機(jī)成像尺寸(px,py),計(jì)算影像的地面分辨率μ,即影像像元大小與實(shí)際地理距離的比值:
μ=dx/px=dy/py(2)
依據(jù)實(shí)際成像長度dx和期望航向重疊度qx,計(jì)算航向攝影基線Bx:
Bx=(1-qx)×dx(3)
依據(jù)實(shí)際成像寬度dy和期望旁向重疊度qy,計(jì)算旁向攝影基線By:
By=(1-qy)×dy(4)
依據(jù)航向重疊度qx和無人機(jī)作業(yè)飛行速度W,計(jì)算拍攝間隔時(shí)間τ:
2.3 攝影航跡點(diǎn)計(jì)算
結(jié)合上述特高拱壩雙曲函數(shù)模型、航空攝影參數(shù)和旁向攝影基線,確定無人機(jī)作業(yè)高程,并以此分別計(jì)算左岸拱壩主體、中間拱壩主體(泄洪口區(qū)域)和右岸拱壩主體3個(gè)部分的攝影航跡點(diǎn)。值得注意的是,由于泄洪口區(qū)域航空攝影的飛行高度應(yīng)對(duì)導(dǎo)流孔、泄洪口等進(jìn)行避障,因此該區(qū)域內(nèi)航攝距離D′一般應(yīng)大于拱壩主體部分,具體流程如圖3所示。
具體的攝影航跡點(diǎn)求解過程如下。結(jié)合拱壩壩頂高程H0及實(shí)際成像寬度dy,獲取首條航帶飛行高程H1:
H1=H0-dy/2(6)
基于航帶飛行高程,結(jié)合雙曲拱壩的平面坐標(biāo)函數(shù)、拱圈體型參數(shù)及拱冠梁剖面參數(shù),線性插值得到期望高程Hi下的拱端厚度、中心線弦長和拱端曲率半徑,依據(jù)該高程下拱壩參數(shù),進(jìn)行單條航帶的航拍點(diǎn)計(jì)算。按照影像實(shí)際成像長度dx,獲取當(dāng)前航帶首張影像所處位置的中心線弧長為
S(i,j)=dx/2(7)
式中:S(i,j)表示第i條航帶的第j張影像所在位置對(duì)應(yīng)的中心線弧長。
根據(jù)拱壩拱圈中心線弧長計(jì)算公式,采用牛頓法求解非線性方程,得到航拍點(diǎn)在中心線上對(duì)應(yīng)位置坐標(biāo)[X(i,j),Y(i,j)],其中X(i,j),Y(i,j)分別表示第i條航帶第j張影像的X,Y軸坐標(biāo)。
依據(jù)航拍點(diǎn)位置坐標(biāo)和拱冠曲率半徑Rci,計(jì)算該位置相對(duì)于壩體對(duì)稱軸(y軸)徑向角φ(i,j):
φ(i,j)=arctan[X(i,j)/Rci]
(8)
結(jié)合距拱壩主體飛行航距D、該位置拱壩厚度Ti、徑向角φ(i,j),計(jì)算航攝點(diǎn)在拱壩坐標(biāo)系下的實(shí)際坐標(biāo):
XF(i,j)=X(i,j)-0.5×(Ti+D)×sinφ(i,j)
YF(i,j)=Y(i,j)+0.5×(Ti+D)×cosφ(i,j)(9)
根據(jù)航向攝影基線Bx,計(jì)算下一航攝點(diǎn)位置的中心線弧長為
S(i,j)=S(i,1)+(j-1)×Bx (j≥1)(10)
判斷下一航攝點(diǎn)是否在當(dāng)前區(qū)域內(nèi),若滿足,則依據(jù)上述步驟繼續(xù)計(jì)算下一航攝點(diǎn)的坐標(biāo)值;若不滿足,則完成當(dāng)前航帶航攝點(diǎn)計(jì)算。依據(jù)計(jì)算得到的航攝點(diǎn)坐標(biāo),計(jì)算各航攝點(diǎn)位置偏航角θ:
式中:Ni為第i條航帶航攝點(diǎn)總數(shù)。研究采用前一、后一航攝點(diǎn)位置連線相對(duì)于y軸方向的偏角作為當(dāng)前航攝點(diǎn)的航偏角;若為該航帶第一航攝點(diǎn),則采用當(dāng)前航攝點(diǎn)與后一航攝點(diǎn)位置進(jìn)行計(jì)算;若為當(dāng)前航帶最后一航攝點(diǎn),則采用當(dāng)前航攝點(diǎn)與前一航攝點(diǎn)進(jìn)行計(jì)算。此外,規(guī)定位于拱壩對(duì)稱軸(y軸)左側(cè)航偏角設(shè)置為負(fù)數(shù),右側(cè)航偏角設(shè)置為正數(shù)。
依據(jù)計(jì)算得到的旁向攝影基線,確定拱壩主體下一航帶飛行具體高程為
Hi=H1+(i-1)×By (i≥1)(12)
式中:Hi表示第i條航帶的拍攝高程。
判斷下一航帶高程是否在拱壩高程范圍內(nèi),若滿足,則依據(jù)上述方法計(jì)算下一航帶的航攝點(diǎn)坐標(biāo);若不滿足,則完成該區(qū)域內(nèi)航線計(jì)算。
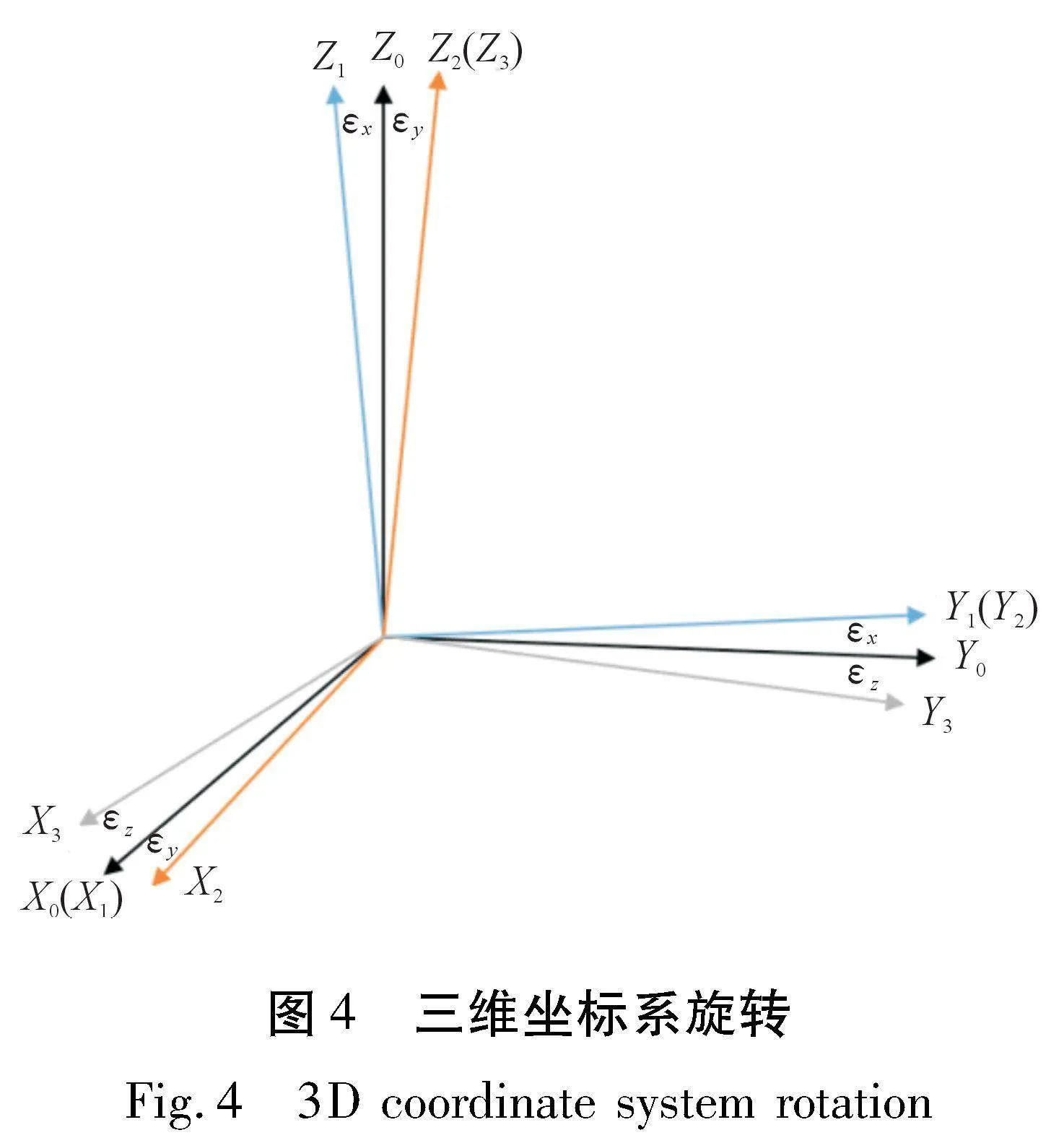
基于拱壩坐標(biāo)系中的航線拍攝點(diǎn),對(duì)航攝點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,得到WGS84坐標(biāo)系下的位置坐標(biāo)。利用已知控制點(diǎn)坐標(biāo)進(jìn)行坐標(biāo)轉(zhuǎn)換參數(shù)求解。坐標(biāo)系變換的步驟是將初始坐標(biāo)系分別繞3個(gè)坐標(biāo)軸進(jìn)行εx,εy,εz旋轉(zhuǎn)后,再將旋轉(zhuǎn)系的原點(diǎn)
平移到下一坐標(biāo)系O-X0Y0Z0的原點(diǎn)上,這時(shí)可將變換描述為
如圖4所示的旋轉(zhuǎn)順序,分別對(duì)應(yīng)3個(gè)變換矩陣,將3個(gè)旋轉(zhuǎn)矩陣相乘可以得到總旋轉(zhuǎn)矩陣:
大型拱壩在坐標(biāo)系變換時(shí)往往視為剛體[16],即三維坐標(biāo)轉(zhuǎn)換時(shí)不涉及尺度縮放參數(shù)。
利用計(jì)算得到的轉(zhuǎn)換參數(shù),將拱壩坐標(biāo)系的航拍點(diǎn)坐標(biāo)轉(zhuǎn)為WGS84坐標(biāo)系下大地坐標(biāo)(X,Y,Z);利用大地坐標(biāo)系轉(zhuǎn)換參數(shù)將大地坐標(biāo)轉(zhuǎn)換至航攝點(diǎn)經(jīng)緯度,滿足無人機(jī)航攝點(diǎn)(B,L,H)的輸入要求。
2.4 航跡范圍劃定及架次分配
考慮到設(shè)計(jì)圖紙與工程實(shí)體存在差異,對(duì)特高拱壩主體邊緣位置進(jìn)行范圍劃定,并去除范圍外航拍點(diǎn)信息,得到巡檢區(qū)域內(nèi)所有攝影點(diǎn)經(jīng)度、緯度和高程信息。同時(shí),由于特高拱壩中軸線與正北方向夾角為178°,拱壩主體下游面呈南向分布;因此在邊緣點(diǎn)剔除時(shí),需要滿足經(jīng)度位于左岸—右岸范圍內(nèi)。
根據(jù)無人機(jī)巡檢作業(yè)時(shí)間(T)、飛行速度(V)及航向攝影基線長度(Bx)進(jìn)行攝影點(diǎn)數(shù)量估算:
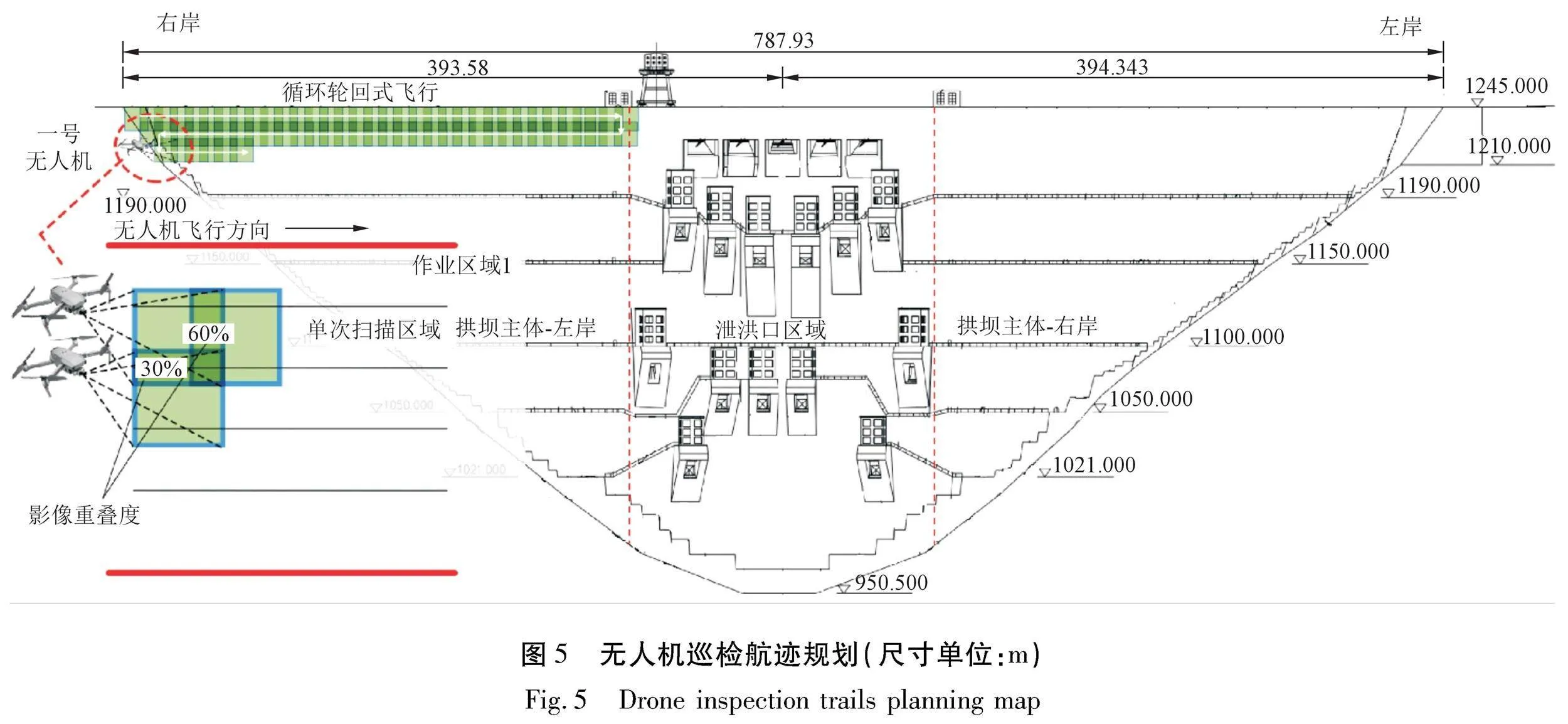
如圖5所示,在特高拱壩無人巡檢作業(yè)中,飛行器采用循環(huán)輪回式作業(yè),以減少無人機(jī)不必要的往返路程。此處各架次航攝點(diǎn)數(shù)量由估算獲得,在進(jìn)行各架次無人機(jī)航跡點(diǎn)分配時(shí),根據(jù)無人機(jī)巡檢作業(yè)時(shí)間及飛行速度進(jìn)行攝影點(diǎn)數(shù)量估算,并依據(jù)實(shí)際情況將航拍點(diǎn)盡量均勻分配到各架次飛行器上,并將所規(guī)劃航帶數(shù)取整,避免自動(dòng)化作業(yè)時(shí)部分區(qū)域的重復(fù)掃描。
3 試驗(yàn)結(jié)果與分析
3.1 航跡規(guī)劃結(jié)果
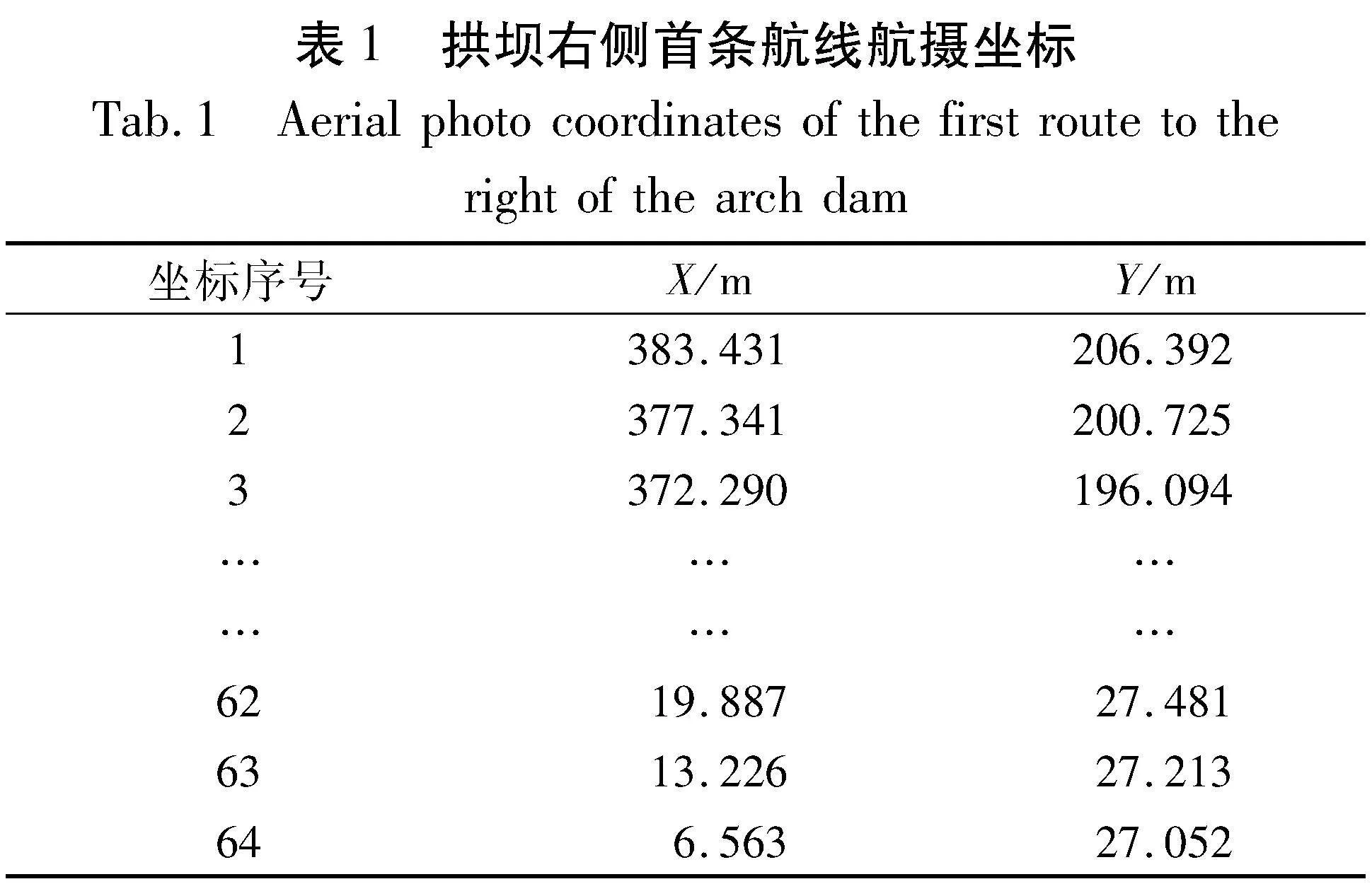
在經(jīng)過上述方法計(jì)算后,每條航線的航向攝影基線長度為7 m(取整后),旁向攝影基線長度為 8 m(取整后)。拱壩左側(cè)的首條航線共拍攝63張航片,隨著作業(yè)高程與拱壩寬度逐漸下降,至最底端僅需拍攝6張相片;同理,拱壩右側(cè)的首條航線共拍攝64張航片,至壩體最底端僅需拍攝6張相片。限于篇幅,下列僅給出壩體右側(cè)首條航帶航攝點(diǎn),如表1所示。
3.2 航跡點(diǎn)數(shù)據(jù)采集
為保證獲取的拱壩影像清晰、分辨率一致、滿足后續(xù)數(shù)據(jù)分析要求,采用3臺(tái)大疆經(jīng)緯M300 RTK無人機(jī)飛行平臺(tái),搭配大疆禪思L1相機(jī)和禪思Zenmuse H20T相機(jī)進(jìn)行混合式巡檢作業(yè)。其中,采用攜帶激光點(diǎn)云數(shù)據(jù)的L1定焦相機(jī)對(duì)拱壩主體部分進(jìn)行高精度影像及點(diǎn)云數(shù)據(jù)獲取,對(duì)拱壩主體區(qū)域進(jìn)行病害檢測(cè);采用H20T變焦相機(jī)對(duì)凸起泄洪口區(qū)域進(jìn)行同精度影像獲取及熱紅外成像,用以檢測(cè)泄洪口區(qū)域滲水情況。
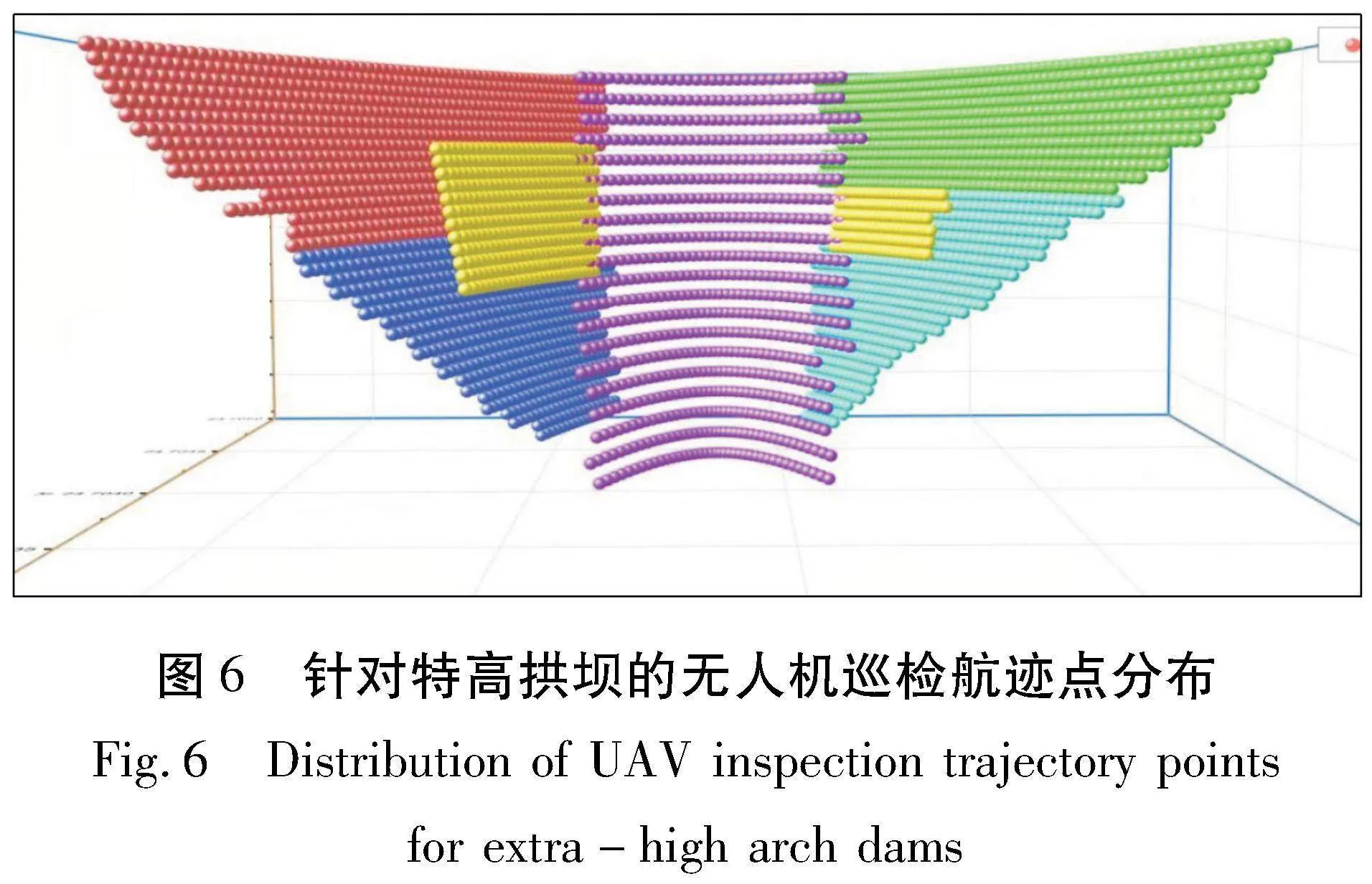
在考慮到無人機(jī)續(xù)航時(shí)間的前提下,將巡檢區(qū)域分為三大塊,共6次航跡,3臺(tái)無人機(jī)分別對(duì)應(yīng)執(zhí)行拱壩左側(cè)、泄洪口和右側(cè)的航跡。一次完整作業(yè),每臺(tái)無人機(jī)需要飛行2個(gè)航次,具體航跡點(diǎn)分布情況如圖6所示。為保證無人機(jī)巡檢作業(yè)安全高效,作業(yè)時(shí)應(yīng)保證溫度適宜、無云霧天氣、無大風(fēng)強(qiáng)降雨天氣[17]。在實(shí)際自動(dòng)化作業(yè)時(shí),氣象條件可由風(fēng)量計(jì)、雨量計(jì)自動(dòng)獲取,以確保天氣在滿足要求的情況下進(jìn)行數(shù)據(jù)采集作業(yè)。值得注意的是,由于作業(yè)區(qū)域位處高山峽谷地區(qū),信號(hào)隱蔽,導(dǎo)致RTK信號(hào)在部分時(shí)段往往會(huì)出現(xiàn)無法收斂達(dá)到固定解的情況[18]。因此,在泄洪口兩側(cè)會(huì)存在“補(bǔ)充飛行”的航跡點(diǎn)部分,如圖6黃色航跡點(diǎn)所示。
在實(shí)際作業(yè)時(shí),通過對(duì)泄洪口兩側(cè)區(qū)域內(nèi)信號(hào)多次測(cè)試,選取需要執(zhí)行補(bǔ)充飛行的區(qū)域。采用H20T相機(jī)變焦模式,距離壩面航距60 m進(jìn)行拍攝,以避免飛行時(shí)RTK信號(hào)中斷的情況。此外,為保證無人機(jī)作業(yè)高效、RTK信號(hào)穩(wěn)定可靠,飛行時(shí)間一般控制在天氣晴朗的11∶00~16∶00,避免厚云天氣對(duì)RTK信號(hào)收斂的影響。
3.3 作業(yè)精度評(píng)價(jià)
為防止無人機(jī)群作業(yè)過程中與大壩發(fā)生撞擊,無人機(jī)數(shù)據(jù)采集時(shí)需要與壩面始終保持一定的安全距離,避免大壩表面泄洪孔及雙曲壩面形狀帶來的撞擊風(fēng)險(xiǎn);此外,為了保證無人機(jī)有足夠電量返航,單次作業(yè)時(shí)間控制在30 min以內(nèi),同時(shí)考慮到壩面數(shù)據(jù)采集的完整性,飛行速度設(shè)置為3 m/s不間斷作業(yè)。影像數(shù)據(jù)處理精度要求:滿足單幅影像像素不低于1 980×1 080,表面缺陷識(shí)別精度達(dá)到毫米級(jí)。
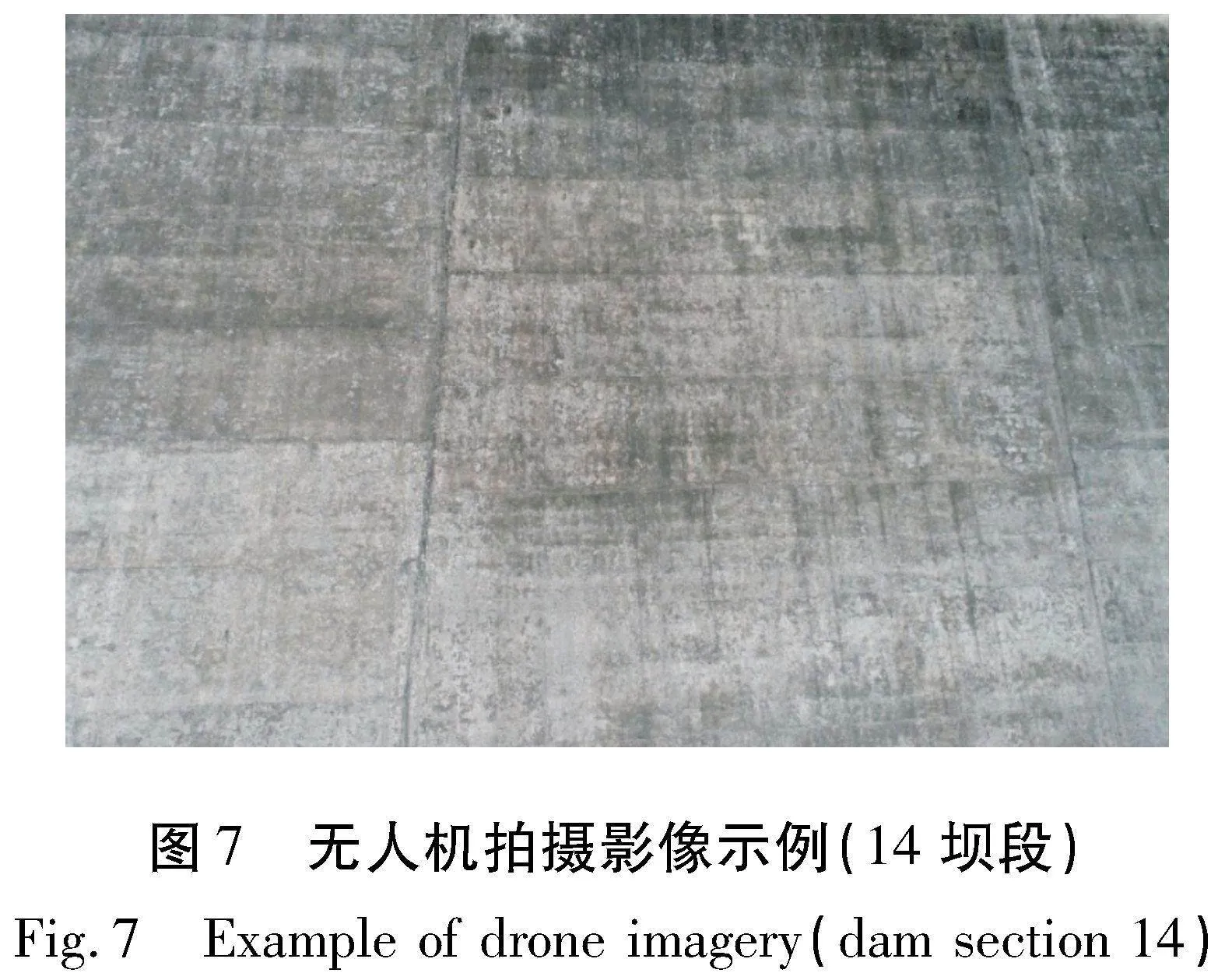
綜合以上約束條件,無人機(jī)在按照規(guī)劃航跡作業(yè)時(shí)采集數(shù)據(jù)的實(shí)際效果較好。如圖7無人機(jī)在大壩14壩段區(qū)域所拍攝的一幅影像所示,其中相機(jī)角度正射于壩面,無明顯偏移,畫面質(zhì)量清晰,光線均勻分布,同時(shí)滿足后期數(shù)據(jù)處理的像素?cái)?shù)量及精度要求。
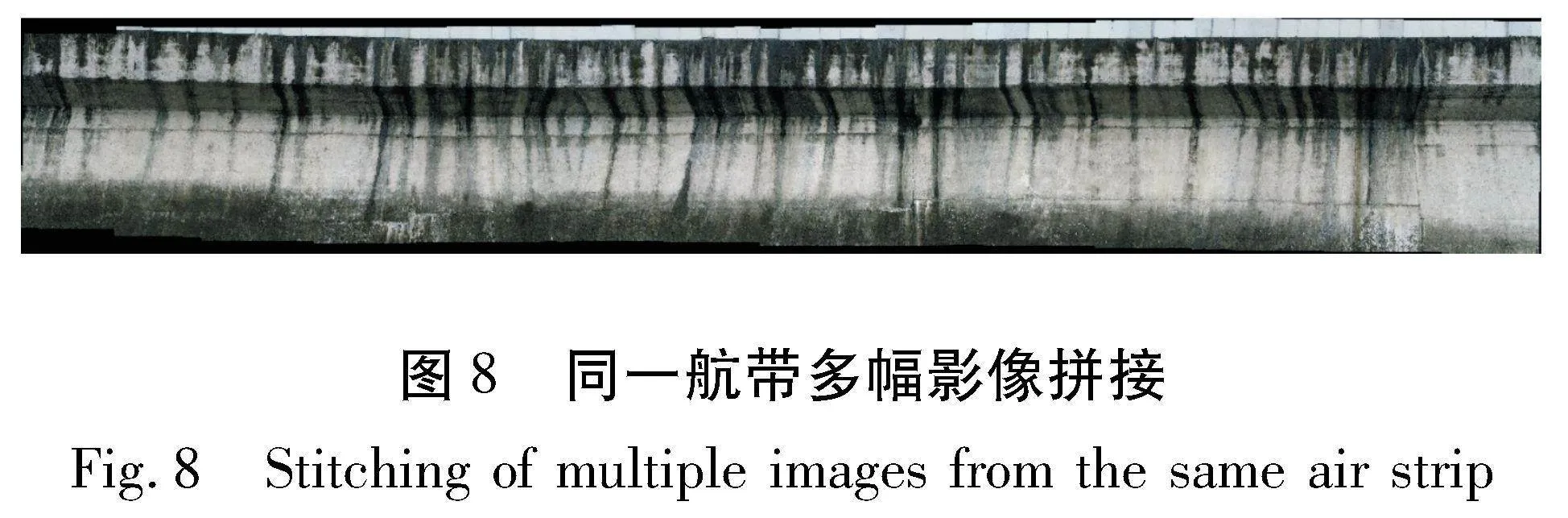
無人機(jī)在大壩左側(cè)第一航帶所攝影像拼接結(jié)果如圖8所示,拼接效果良好,各個(gè)航攝點(diǎn)在同一航帶內(nèi)保持同一水平高度上,確保了圖像的一致性和準(zhǔn)確性。此外,相鄰航片的旁向重疊率達(dá)到預(yù)定的拼接標(biāo)準(zhǔn),確保了圖像間的無縫對(duì)接,提高了畫面整體清晰度和細(xì)節(jié)表現(xiàn)。
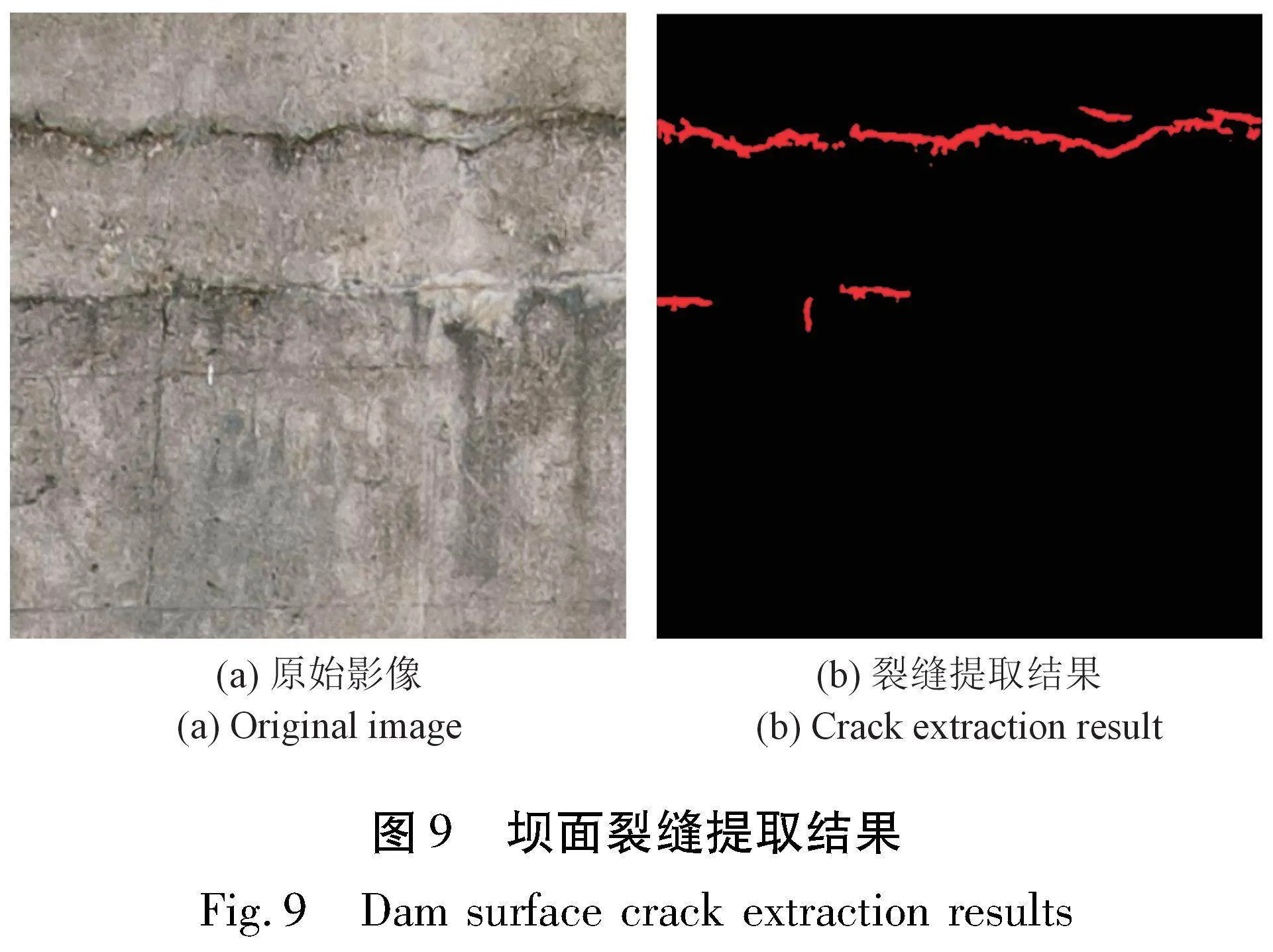
基于某張?jiān)加跋袼崛〉膲蚊媪芽p分析結(jié)果如圖9所示,清晰展示了壩面裂縫的詳細(xì)情況,驗(yàn)證了影像數(shù)據(jù)在后期處理的可靠性和精準(zhǔn)性。
4 結(jié) 論
針對(duì)現(xiàn)有常規(guī)航跡規(guī)劃方法不能滿足雙曲結(jié)構(gòu)的特高拱壩巡檢難題,研究提出了一種特高拱壩的無人機(jī)巡檢航跡規(guī)劃新方法。首先,基于大壩施工圖紙,構(gòu)建拱壩函數(shù)模型;其次,依據(jù)無人機(jī)和相機(jī)型號(hào)及航空攝影要求確定各項(xiàng)航空攝影參數(shù)信息,并以此計(jì)算拱壩主體和泄洪口區(qū)域的攝影航跡點(diǎn);然后對(duì)航攝點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,以符合航跡任務(wù)坐標(biāo)輸入要求;再對(duì)特高拱壩主體邊緣位置進(jìn)行范圍劃定,去除巡檢范圍外航拍點(diǎn)信息;最后根據(jù)無人機(jī)續(xù)航時(shí)間及飛行速度將航攝點(diǎn)均勻分配到各臺(tái)無人機(jī)上。
與現(xiàn)有技術(shù)相比,該方法考慮了特高拱壩幾何結(jié)構(gòu)的特殊性,將巡檢區(qū)域分區(qū)并分區(qū)作業(yè)。針對(duì)不同的拱壩主體和泄洪口建造結(jié)構(gòu),采取不同的航攝距離,在保證攝影精度的前提下,保證巡檢作業(yè)的安全可靠。此外,該方法充分考慮了航空攝影作業(yè)中地面分辨率、航向重疊度和旁向重疊度的要求,有效保證了航拍影像的精度及后期圖像拼接與病害監(jiān)測(cè)工作的順利開展。本文所提方法成功應(yīng)用于云南省小灣水電站的實(shí)際巡檢中,不僅顯著提高特高拱壩的巡檢效率和安全性,為流域安全監(jiān)測(cè)提供了技術(shù)支撐,也為類似復(fù)雜大型結(jié)構(gòu)的無人機(jī)監(jiān)測(cè)技術(shù)提供新的研究思路和應(yīng)用實(shí)踐實(shí)例。
參考文獻(xiàn):
[1] 李嘯嘯,馮永祥,儲(chǔ)兆偉,等.水電站水工巡視檢查工作的改進(jìn)[J].大壩與安全,2022(6):10-16.
[2] 吳月超,鄭南軒,蘇華佳,等.面向智能水電站的在線監(jiān)測(cè)狀態(tài)實(shí)時(shí)自動(dòng)巡檢方法與應(yīng)用[J].電力系統(tǒng)自動(dòng)化,2017,41(9):123-129.
[3] 陶于金,李沛峰.無人機(jī)系統(tǒng)發(fā)展與關(guān)鍵技術(shù)綜述[J].航空制造技術(shù),2014(20):34-39.
[4] 周建國,趙思琦,史波,等.基于測(cè)量機(jī)器人的大壩外觀監(jiān)測(cè)精度影響因素研究[J].人民長江,2022,53(9):115-120,162.
[5] 彭向陽,劉正軍,麥曉明,等.無人機(jī)電力線路安全巡檢系統(tǒng)及關(guān)鍵技術(shù)[J].遙感信息,2015,30(1):51-57.
[6] 王秋生,賀云濤,張曉輝,等.基于無人機(jī)航拍圖像的車道線檢測(cè)方法綜述[J].無人系統(tǒng)技術(shù),2019,2(5):9-16.
[7] 潘紹林.基于單鏡頭無人機(jī)的勝天水庫大壩測(cè)繪[J].水利水電快報(bào),2024,45(1):23-27,38.
[8] 魏工哲,周浩,池曉壯.無人機(jī)攝影測(cè)量在丹江口大壩庫區(qū)地形測(cè)量中的應(yīng)用[J].水利水電快報(bào),2023,44(12):31-35.
[9] 趙薛強(qiáng),凌峻.無人機(jī)自動(dòng)巡檢智慧監(jiān)控系統(tǒng)研究與應(yīng)用[J].人民長江,2022,53(6):235-241.
[10] 王瓊,劉美萬,任偉建,等.無人機(jī)航跡規(guī)劃常用算法綜述[J].吉林大學(xué)學(xué)報(bào)(信息科學(xué)版),2019,37(1):58-67.
[11] ZHANG J,XING J.Cooperative task assignment of multi-UAV system[J].Chinese Journal of Aeronautics,2020,33(11):2825-2827.
[12] 穆秀英,吳新.瀾滄江流域水電開發(fā)及其特點(diǎn)[J].電網(wǎng)與清潔能源,2010,26(5):72-78.
[13] 中國大壩工程學(xué)會(huì).云南瀾滄江小灣水電站[J].城鄉(xiāng)建設(shè),2019(17):76-77.
[14] 黃世強(qiáng).混凝土壩結(jié)構(gòu)缺陷檢測(cè)技術(shù)進(jìn)展和展望[J].大壩與安全,2016(3):1-9.
[15] WANG Z,YU Y,WANG J,et al.Convolutional neural-network-based automatic dam-surface seepage defect identification from thermograms collected from UAV-mounted thermal imaging camera[J].Construction and Building Materials,2022,323:126416.
[16] 陳姣姣,李家云.拱壩應(yīng)力變形及壩肩穩(wěn)定分析[J].東北水利水電,2021,39(6):55-58,72.
[17] 朱宏亮.基于多時(shí)相無人機(jī)載圖像的堤壩隱患變化識(shí)別方法研究[D].濟(jì)南:山東大學(xué),2024.
[18] 熊志昂,李紅瑞,賴順香.GPS技術(shù)與工程應(yīng)用[M].北京:國防工業(yè)出版社,2005.
Unmanned aerial vehicle inspection trajectory planning method for extra-high arch dams
Abstract:
Due to the low efficiency and high safety risks associated with traditional high-altitude hanging methods for dam surface inspections,conventional unmanned aerial eehicle flight path planning methods fail to meet the inspection requirements of hyperbolic structures in ultra-high arch dams.In response,a novel unmanned aerial vehicle flight path planning method specifically designed for the inspection of ultra-high arch dams was proposed and applied to Xiaowan Hydropower Station in Yunnan Province.First,a mathematical model of the arch dam was constructed.Then,based on camera parameters and aerial photography requirements,various aerial photography parameters were determined,and the photography waypoint coordinates were calculated.Next,the waypoint coordinates were transformed,and finally,the flight path points were confined and assigned to different unmanned aerial vehicle groups based on the actual conditions in the field.The results showed that unmanned aerial vehicle images collected based on this flight path planning method can achieve complete coverage of the dam surface,with high image quality that meets the requirements for subsequent data processing.The research results can provide technical support for safety monitoring in river basins and offer a new approach to flight path planning for other similar large and complex structures.
Key words:
security monitoring; intelligent inspection; trajectory planning; extra-high arch dam; unmanned aerial vehicle; Xiaowan Hydropower Station
猜你喜歡
電腦知識(shí)與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時(shí)代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機(jī)使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導(dǎo)報(bào)(2016年9期)2016-05-26 20:58:26
