雙并列轉子永磁電機非對稱負載運行特性
2024-12-03 00:00:00戈寶軍范陣雨林鵬
電機與控制學報 2024年10期
關鍵詞:永磁同步電機































摘 要:雙并列轉子電機在驅動兩側非對稱負載時,輕載側電機的功角較低,產生了電機材料浪費,效率低等問題。為提升電機整體輸出功率,基于雙并列轉子電機基本理論采用解析法求得電機驅動轉矩平均值的表達式,進而提出輕載側繞組提前的結構設計。而后以一臺12極72槽雙并列轉子電機為例,建立其磁網絡模型,通過麥克斯韋應力張量法得出驅動轉矩的解析計算式,分析轉子偏差角對電機基本轉矩脈動的影響,得出最佳繞組提前槽數。最后,針對電機轉矩脈動較大的問題,使用響應曲面法,以基本轉矩脈動為目標函數,以永磁體偏心距、永磁體極弧系數、并接區高度作為自變量對電機進行優化,有效降低電機轉矩脈動,驗證了繞組前置的結構改進對提升電機非對稱狀態下的輸出轉矩具有顯著效果。
關鍵詞:永磁同步電機;雙并列轉子;轉矩脈動;等效磁網絡;響應曲面法;耦合區
DOI:10.15938/j.emc.2024.10.006
中圖分類號:TM351
文獻標志碼:A
文章編號:1007-449X(2024)10-0055-11
收稿日期: 2024-05-17
作者簡介:戈寶軍(1960—),男,博士,教授,博士生導師,研究方向為大型機電能量轉換裝置的基礎理論與應用技術;
范陣雨(2000—),男,碩士研究生,研究方向為永磁電機設計與優化;
林 鵬(1983—),男,博士,講師,研究方向為永磁電機的電磁場數值分析。
通信作者:戈寶軍
Asymmetric load operation characteristics of dual-parallel rotor permanent magnet synchronous motor
GE Baojun, FAN Zhenyu, LIN Peng
(National Engineering Research Center of Large Electric Machines and Heat Transfer Technology, Harbin University of Science and Technology, Harbin 150080, China)
Abstract:When the double-parallel rotor motor drives the asymmetric load on both sides, the power Angle of the light side motor is low, resulting in motor material waste and low efficiency. To improve the overall output power of the motor, based on the basic theory of dual parallel rotor motors, an analytical method was used to obtain the expression for the average driving torque of the motor, and then a structural design for advancing the winding on the light load side was proposed. Then, taking a 12-pole 72-slot double-parallel rotor motor as an example, the magnetic network model was established, and the analytical calculation formula of driving torque is obtained through Maxwell stress tensor method. The influence of rotor deviation angle on the basic torque pulsation of the motor was analyzed, and the optimal number of winding advance slots was obtained. Finally, for the problem of large motor torque pulsation, the response surface method was used to optimize the motor with basic torque pulsation as the objective function, and the eccentricity of permanent magnet, polar arc coefficient of permanent magnet and joint height as the independent variables, which effectively reduced the motor torque pulsation. It was verified that the structural improvement of winding front had a significant effect on improving the output torque of the motor under asymmetric state.
Keywords:permanent magnet synchronous motor; double-parallel rotor; torque ripple; equivalent magnetic circuit; response surface method; coupling area
0 引 言
食品生產、鋼鐵加工、建材、化工等行業在生產過程中往往要采用一系列平行雙軸對驅機械,例如雙螺桿液體泵、雙軸攪拌機、輥軋機等[1-3]。這種結構在使用時通常要求在兩個平行放置的轉軸上分別輸入方向相反的轉矩。傳統驅動方式采用單臺電機驅動主動軸,被動軸通過同步齒輪結構與主動軸相連以獲得驅動力矩,但同步齒輪的使用會帶來潤滑需求、體積龐大、維護困難等問題。
為解決同步齒輪帶來的一系列問題,中外學者提出使用兩臺電機分別驅動主、被動軸的方案和使用磁力齒輪取代機械齒輪的方案,這兩種方案存在機械強度與同步困難等問題[4-5],未能取得理想的效果。在這種局面之下,雙并列轉子永磁同步電機(dual-parallel rotor permanent magnet synchronous motor,DR-PMSM)應運而生[6],其將上文的兩種方案結合,有著結構緊湊、可控性強、維護方便、直接驅動負載等優點。
DR-PMSM問世至今,已得到許多學者的關注。已有的研究包括大型DR-PMSM的設計方法;分析與優化此種電機較大的轉矩脈動;推導其運行特性等方向[7-9]。以上研究的目標負載為大小相等、方向相反的對稱負載,并未對負載轉矩不同時的電機轉矩關系進行研究。而在實際工業生產中,存在偏心雙軸攪拌機[10]、雙轉子雙級制砂機等兩側負載轉矩不同的生產機械,若不加判斷就將用于對稱負載的DR-PMSM用于非對稱負載,會存在電機總輸出轉矩降低、振動噪聲大等問題,嚴重時還會導致電機失穩、停轉。
為提升DR-PMSM在驅動不對稱負載時的性能,需要對其結構進行一定改進。本文針對驅動不對稱負載時總輸出轉矩降低問題,通過對電機驅動轉矩產生原理進行分析,求得驅動轉矩解析方程,提出輕載側繞組前置改進。將磁網絡模型法與響應曲面法結合,對電機關鍵結構尺寸進行優化。最后通過高精確度有限元驗證改進后電機的電磁性能,證明輕載側繞組前置設計在非對稱負載工況下能夠輸出較大轉矩,同時還可以降低電機轉矩脈動。
1 雙并列轉子電機基本原理
1.1 電機結構及工作原理
DR-PMSM在結構上可以看作是兩臺完全相同的永磁同步電機削去一部分鐵心與繞組后并行拼接得到的新型電機,整體結構如圖1所示。
定子鐵心在保留必要繞組槽之外還留有一定的空槽,空槽在槽結構上與繞組槽相同,其內部不放置繞組,不會對電機整體輸出轉矩產生影響。空槽的存在使電機氣隙磁場更加對稱,提升電機性能。
定子繞組采用反向排布,即左側繞組逆時針排布,右側繞組采用與之相反的順時針排布,如圖2所示,兩側繞組串聯相接,通三相電流后形成兩個旋轉方向相反的磁場驅動兩側轉子,實現DR-PMSM的并行對驅功能。
轉子采用表貼式永磁體的結構,其一方面與己側定子繞組構成永磁電機結構以獲得電磁轉矩,另一方面與對側轉子構成磁齒輪結構從而傳遞磁齒輪轉矩。在對稱運行時,兩側轉子上鏡像位置的磁極磁性相反,轉子整體受到的永磁體切向吸引力為0,可作為常規永磁電機分析;當轉子因為某些原因不再鏡像對稱時,轉子會相互吸引,實現更好的同步性。
1.2 并接區設計原則
DR-PMSM相較于普通永磁同步電機,最大的不同是其左右兩側之間存在一個磁場交互區即并接區,如圖3所示。并接區的存在使得電機的磁場分布發生改變,進而影響電機電磁特性。為進一步研究DR-PMSM,需要明確并接區的尺寸選擇原則,選取合適的并接區尺寸。
根據電機定子分塊理論[11],一個定子槽數為Q1,極對數為p的永磁同步電機,其定子可以被分解為GCD(Q1,p)個單元模塊,在切去整數個單元模塊電機后,剩余的部分依然可以產生電磁轉矩。每個單元電機所占圓心角為
α=2πGCD(Q1,p)。(1)
式中GCD(Q1,p)為電機定子槽數Q1和極對數p的最大公因數。每個定子槽所占圓心角為
β=2πQ1。(2)
并接區占用最大圓心角為
γmax=kcα+2ksβ。(3)
式中:kc為單元電機切割數,取值范圍為小于GCD(Q1,p)的整數,ks為定子空槽對數。確定以上角度后,可以求得并接區最大高度為
hmax=Dsisin(γmax2)。(4)
式中Dsi為定子內徑。
并接區最小高度理論上可以取0,但考慮到生產工藝的限制,一般存在一個最小并接區高度hmin對其進行限制,此時并接區高度范圍為
hmax≥h≥hmin。(5)
并接區寬度為
d=L-Dsi+2δ。(6)
式中:L為轉子軸心距;δ為單邊氣隙長度。因為轉子軸心距由連接的負載決定,無法對其進行修改;而定子內徑與氣隙長度均為電機重要參數,在修改后會極大影響電機性能,所以在設計后期想要修改并接區寬度較為困難,最好在設計初期確定后就不再更改。
表1為一臺DP-PMSM的主要結構參數,此電機用于驅動兩側攪拌葉片不同的雙軸攪拌機。
2 電機驅動轉矩分析
2.1 電機運動方程
為方便討論,將軸線左側定轉子及繞組定義為左側電機,右側定轉子及繞組定義為右側電機,設左側電機為重載側,右側電機為輕載側。
根據常規永磁電機理論及平行軸永磁齒輪理論[12]得到DR-PMSM運動方程如下:
JLdωmLdt=TeL+TpL-TLL;
JRdωmRdt=TeR+TpR-TLR。(7)
式中:JL和JR為左側系統和右側系統的轉動慣量;ωmL和ωmR為左側和右側系統的機械角速度;TeL和TeR為左側和右側電機的電磁轉矩;TpL和TpR為左側和右側轉子永磁體相互吸引產生的的磁齒輪轉矩,其大小相等符號相反;TLL和TLR為左側和右側電機的負載轉矩。電磁轉矩與磁齒輪轉矩之和就是電機受到的驅動轉矩。
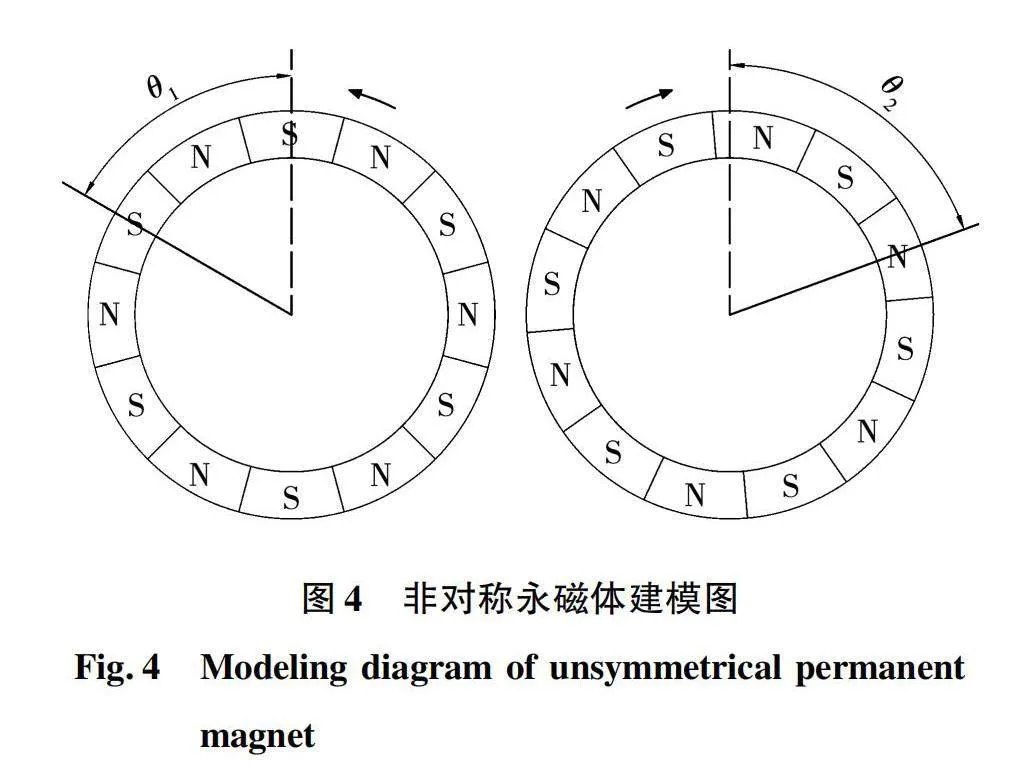
由式(7)可以看出,當一側負載轉矩變小時,轉子加速旋轉,左右轉子將不再鏡像對稱,如圖4所示。
圖4虛線為兩轉子角度起點,θ1和θ2分別為一組對應永磁體軸線與角度起點的機械角度,角度以旋轉方向為正方向。定義轉子偏差角為θ=θ2-θ1,電機電磁轉矩與磁齒輪轉矩大小均與轉子偏差角相關,一旦轉子偏差角變化,電機的轉矩關系也會發生變化,進入新的平衡態。
2.2 驅動轉矩解析計算
電機控制方式選用在重載側進行id=0的矢量控制,基本電磁轉矩方程為
Te=32piq[(Ld-Lq)id+ψf]。(8)
式中:p為極對數;id,iq分別為電機定子d、q軸電流;Ld,Lq分別為d、q軸電感;ψf為永磁體磁鏈。
對于目標DR-PMSM,由于其定子切除了兩個單元電機以及其具有左右對稱、氣隙均勻的結構,左右側電機電磁轉矩方程簡化為
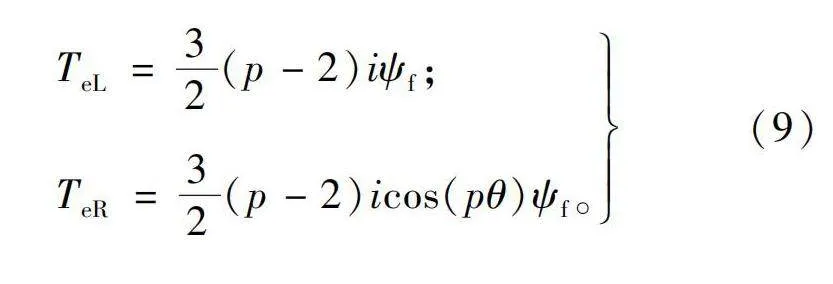
TeL=32(p-2)iψf;
TeR=32(p-2)icos(pθ)ψf。(9)
式中:i為左側電機定子q軸電流;角度pθ為右側電機勵磁磁勢與電樞磁勢的夾角,也是勵磁電勢與電樞電流的夾角即內功率因數角;icos(pθ)為右側電機定子q軸電流。
圖5為按表1樣機尺寸,在電流取額定電流的情況下,按式(9)擬合及有限元仿真得到的兩側電機電磁轉矩隨偏差角的變化曲線,其中轉矩正方向為電機旋轉方向。曲線表明左側電機電磁轉矩保持在80.44 N·m,而右側電機電磁轉矩隨偏差角電角度在一個周期內余弦變化,其幅值為80.42 N·m,仿真數值變化趨勢及數值均與理論推導相符。計算值略低于仿真值的原因是解析計算完全忽略了轉子上多余的兩對磁極對磁場的影響,但實際上磁極通過并接區等結構閉合后會提供小部分電磁轉矩。這部分電磁轉矩僅占全部電磁轉矩的1.33%,對整體結果影響較小,處于可接受的范圍內。
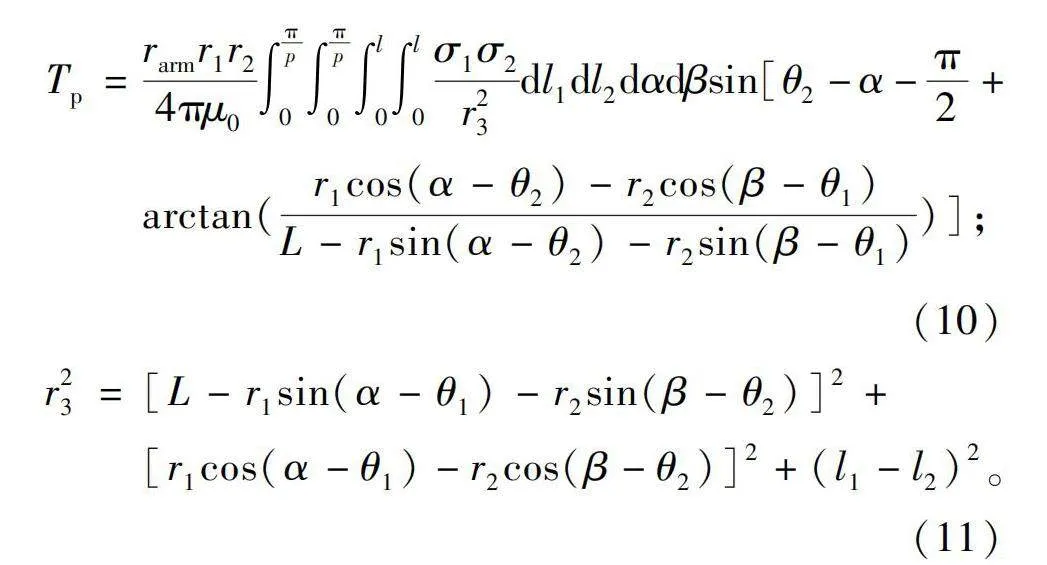
雙并列轉子電機兩側的磁齒輪轉矩采用等效磁荷法[13]對其進行計算,具體計算公式如下:
Tp=rarmr1r24πμ0∫πp0∫πp0∫l0∫l0σ1σ2r23dl1dl2dαdβsin[θ2-α-π2+arctan(r1cos(α-θ2)-r2cos(β-θ1)L-r1sin(α-θ2)-r2sin(β-θ1))];(10)
r23=[L-r1sin(α-θ1)-r2sin(β-θ2)]2+[r1cos(α-θ1)-r2cos(β-θ2)]2+(l1-l2)2。(11)
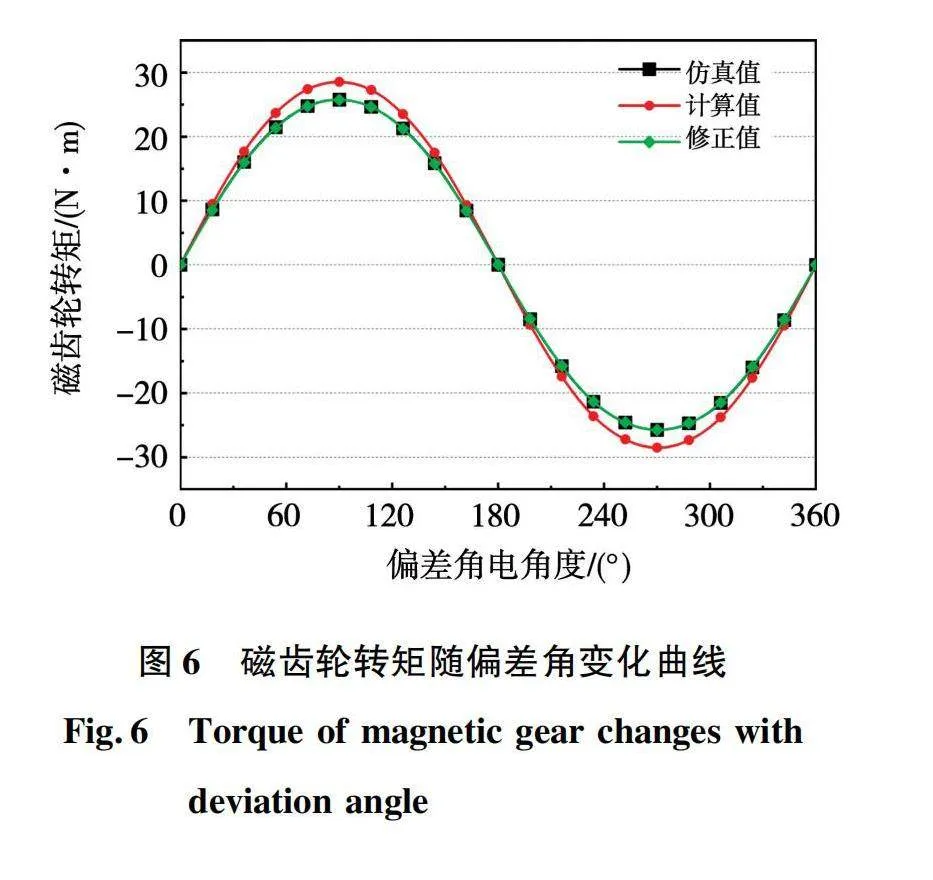
式中:r1和r2為兩側永磁體的外徑;rarm為力臂,其大小等于r1或r2;μ0為真空磁導率;σ1和σ2是兩側永磁體端面的磁荷面密度;l1和l2為兩側永磁體長度;r3為兩塊微元的直線距離。解析計算結果如圖6所示。
由圖6可知,通過解析計算與有限元仿真得出的磁齒輪轉矩均隨偏差角正弦變化,解析計算得到的轉矩幅值為28.52 N·m,仿真得到的轉矩幅值為25.75 N·m,相對偏差為10.68%。出現較大偏差的原因是進行磁荷計算時忽略了定子鐵心,而實際上有部分磁力線通過定子鐵心垂直穿過氣隙不提供切向力矩,使得計算值偏高。為修正這個偏差,可對原計算式乘以一個小于1的修正系數kp,修正后相對誤差降低至2.17%,在可接受范圍內。
結合式(7)~式(11)對電機總驅動轉矩進行計算,計算結果如圖7所示。
圖7中計算值與仿真值最大偏差僅為2.48%,表明解析計算法能較好地計算電機的總驅動轉矩,簡化計算。根據曲線變化趨勢可以看出,當偏差角變大,右側電機驅動轉矩降低的幅度遠大于左側電機驅動轉矩增加的幅度,使電機整體輸出轉矩降低,性能下降。
2.3 非對稱負載下的運行特性優化
由式(7)可得,電機輸出總轉矩為兩側驅動轉矩之和,右側電機在大偏差角下驅動轉矩下降的原因是電磁轉矩隨內功率因數角變大而降低。解決此問題可采用兩套繞組分別控制兩側電機[14]或是重新排布繞組的方式。鑒于分別控制的方式會提升控制成本,故采用改變繞組排布的方式進行改進,具體方式為右側電機全部繞組順時針旋轉km個槽從而將右側電機磁場相位提前,因旋轉而空缺的首端槽由末端繞組進行逐個填充,旋轉后繞組總數不發生改變。圖8為順時針旋轉3個槽時的右側電機繞組。
此時左側電機電磁轉矩不變,而右側電機因為磁場超前于左側電機pkmβ個電角度,電磁轉矩公式變為
TeR=32(p-2)icos(pθ-pkmβ)ψf。(12)
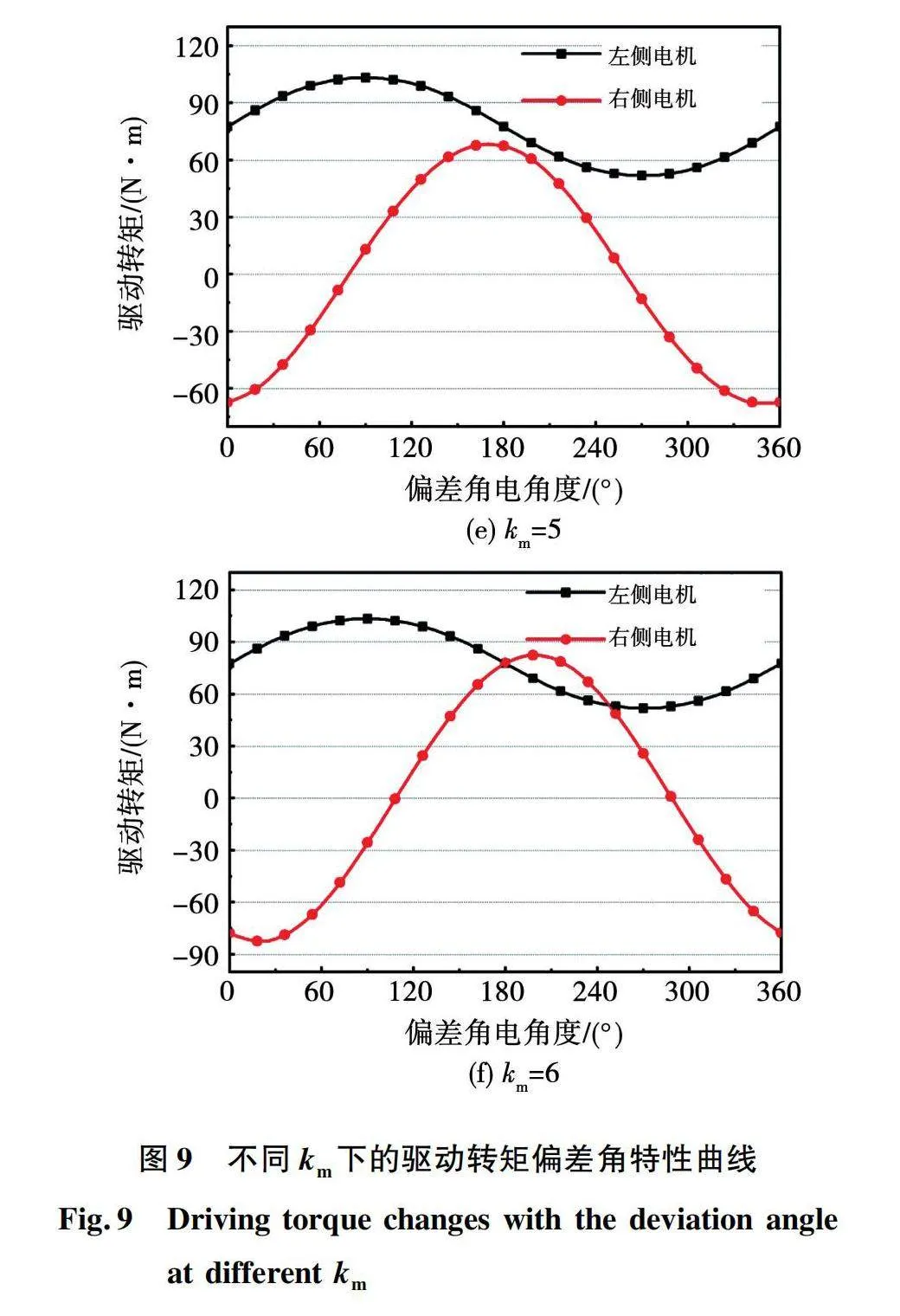
根據式(12)分別計算km取1~6時的右側電機驅動轉矩,繪制其隨偏差角變化的曲線如圖9所示。
由圖9可見,當km = 2,3,4時,電機在理想工作點附近能夠實現保證整體輸出轉矩不降低的同時輸出兩個大小不等方向相反的驅動轉矩,以滿足負載要求。而當km=1,5,6時不存在理想工作點。
此處選取km=3對右側轉子進行靜態穩定性分析,設負載轉矩大小與偏差角無關,當右側負載轉矩增大,右側電機轉速降低,右側電機轉速低于左側電機轉速,偏差角減小,若此時電機驅動轉矩隨偏差角減小而增大,則電機能夠保持同步。根據以上分析,穩定區判據為
d(TeR+TpR)dθlt;0。(13)
結合圖9與穩定區判據可以得出,km=2,3,4時的理想工作點位于穩定運行區間,能夠同時滿足負載要求和穩定性要求。
3 等效磁網絡模型的建立及求解
等效磁網絡(equivalent magnetic network,EMN)模型有著計算時間短、適用于非線性模型等優點,可以同時兼顧計算效率與計算精確度。為進一步觀察DR-PMSM的轉矩性能,需要通過建立等效磁網絡模型的方法求解電機各部磁密,利用麥克斯韋應力張量法計算每一時刻下的驅動轉矩。
3.1 等效磁網絡模型的建立
建立磁網絡模型時,一般將復雜結構分解為若干典型磁導單元的組合。常用基本磁導單元形狀包括弧形單元、矩形單元與梯形單元[15]。
圖10為DR-PMSM一個磁極下的等效磁網絡模型。其中:定子齒部幾何結構可以看作矩形單元與梯形單元的串聯;定子軛部、槽漏磁導、氣隙磁導、轉子磁導的磁導單元均近似于矩形單元;定子槽口處磁導單元形狀類似1/4圓弧;定子電樞繞組磁動勢與軛部切向磁導串聯,其計算式為F=Nci,其中:Nc為槽內每個線圈的匝數;i為繞組當前時刻通過的電流值。
由于永磁體采用偏心削極結構,無法作為一整塊永磁體直接進行計算,故對其進行分塊處理后近似為矩形永磁體塊。具體計算式如下:
GPM=μ0μPMlabPMhPM;(14)
?PM=BrbPMla。(15)
式中:μ0為真空磁導率;la為軸向長度;μPM為永磁體相對磁導率;bPM為本段永磁體寬度;hPM為本段永磁體平均厚度;Br為永磁體剩磁。
并接區作為DR-PMSM獨有的結構,需要單獨劃分其磁通路徑,可依照材料的不同將并接區分為并接區鐵心和并接區氣隙,如圖11所示。
圖11表明并接區鐵心部分可以分解為標號為①②③的3個梯形單元,并接區氣隙④則可以根據計算需要分解為若干個大小不同的梯形單元。根據以上分解方式建立的并接區磁網絡模型如圖12所示。
至此,電機整體的磁網絡模型建立完畢,可進行下一步求解計算。
3.2 驅動轉矩的磁網絡計算
建立網絡模型后,可通過常規矩陣迭代的方式求解得到一個周期內各時刻下的電機磁場狀態,進而計算電機在一個周期內的電磁轉矩曲線,相較于傳統公式計算能夠更加細致地分析電機運行時的轉矩關系。
麥克斯韋應力張量法利用面電流和體電流替代鐵磁材料,利用安培定律得到電機驅動轉矩與氣隙磁場關系為
T=r2δlaμ0∫2π0BrBtdθ。(16)
式中:rδ為氣隙圓周半徑;Br和Bt為通過磁網絡計算得到的氣隙徑向和切向磁密。
磁網絡氣隙單元近似為矩形單元,其氣隙磁密可表示為:
Brk=GδYkFδYk;
Btk=GδXkFδXk。(17)
式中:GδYk、GδXk分別為第k個氣隙單元的縱向磁導和切向磁導;FδYk、FδXk分別為第k個氣隙單元的縱向磁勢與切向磁勢。將式(17)代入式(16)可得電機驅動轉矩表達式為
T=rδlaμ0∑nk=1GδYkFδYkGδXkFδXkak。(18)
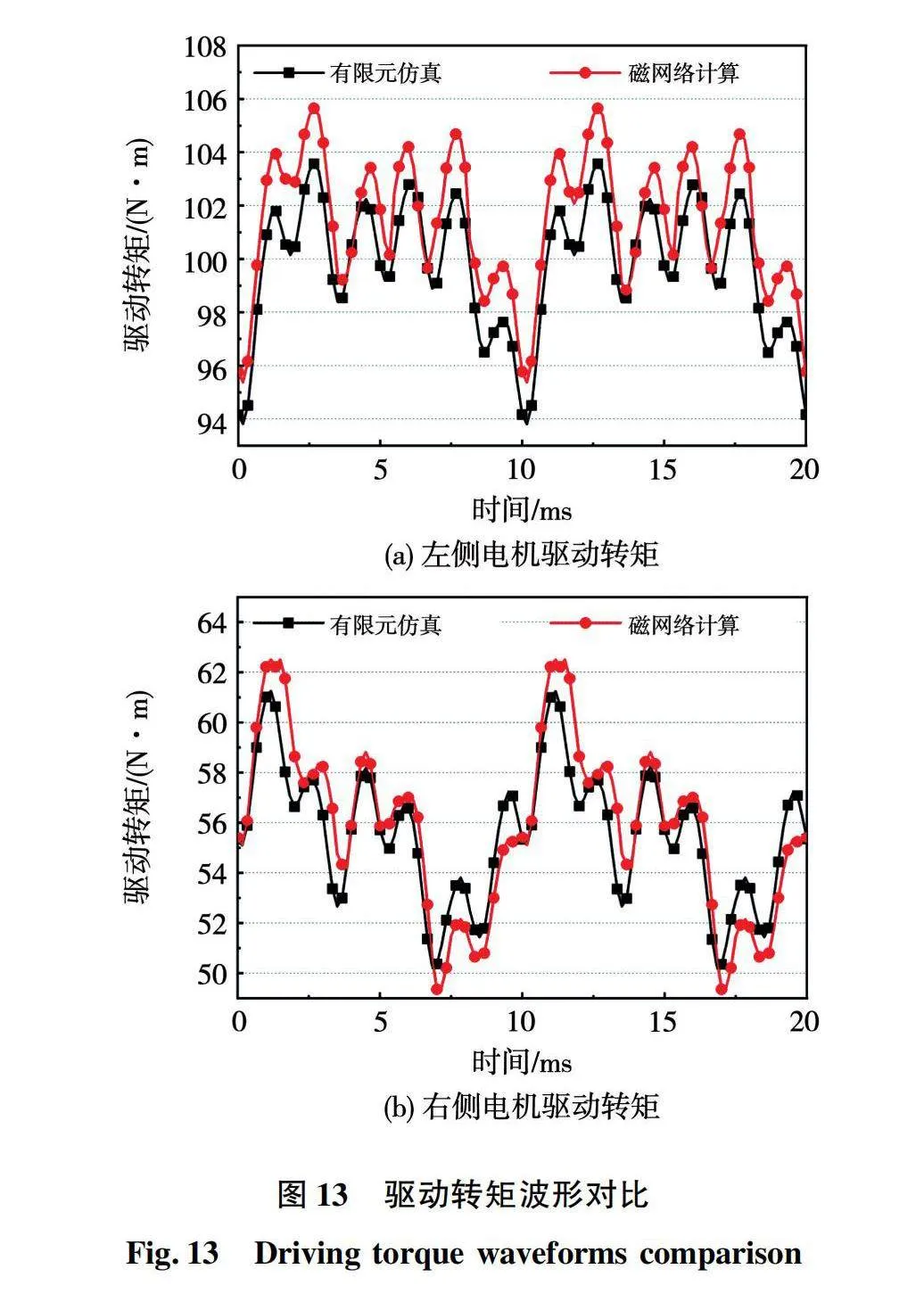
式中:n為轉子周圍氣隙單元總數;ak為第k個氣隙單元的切向長度。根據此式計算一個周期內的電機電磁轉矩如圖13所示。
由圖13可見,磁網絡計算結果相較有限元仿真計算僅有2.84%的偏差,而后者計算一次所需的時間是前者的數倍。所以使用磁網絡模型進行計算既不失精確度又能快速得到結果,可用于電機優化工作。
4 非對稱負載狀態轉矩脈動優化
DR-PMSM轉矩脈動分為紋波轉矩、齒槽轉矩、磁齒輪轉矩脈動及端部效應力矩。其中后3種轉矩在繞組電流為0時就存在,對其求和后定義為DR-PMSM的基本轉矩脈動。
4.1 轉子偏差角對基本轉矩脈動的影響
基本轉矩脈動中的磁齒輪轉矩脈動指磁齒輪在一個周期內傳遞的轉矩存在脈動,其原因是兩轉子在同步旋轉過程中磁化方向夾角總在發生改變,其大小與運行時的轉子偏差角有關。圖14為不同轉子偏差角對電機基本轉矩脈動進行仿真計算結果曲線。
由圖14可見,兩側電機的基本轉矩脈動減小趨勢基本一致,均隨著轉子偏差角的增大而減小,在轉子偏差角從0°變化到30°的過程中,基本轉矩脈動由13.68 N·m降至6.69 N·m,降幅較大。在設計電機理想轉子偏差角時,在滿足電機穩定性的同時,讓電機工作在較大的轉子偏差角下可以減小基本轉矩脈動,提升磁齒輪轉矩,使轉矩性能提升。因此,選取繞組提前系數km=4作為電機最終繞組排布方案。
4.2 響應曲面法優化基本轉矩脈動
由式(18)可知,DR-PMSM的基本轉矩脈動與并接區結構,永磁體結構、鐵心結構等因素非線性相關,而響應面法在優化非線性問題時性能優秀[16]。因此選取表達式中影響較大的并接區高度h、永磁體偏心距hp、永磁體極弧系數αp作為自變量,通過響應曲面法對電機進行優化。
在進行響應曲面法優化前,需要對自變量進行單因素實驗以縮小變量取值范圍從而得到更好的優化效果,圖15為3個自變量對基本轉矩脈動的單因素實驗曲線。
由圖15可見,3個自變量都對基本轉矩脈動有較大的影響,與理論推導相符。根據曲線變化趨勢,選取的自變量取值范圍為:110 mm≤h≤125 mm,42 mm≤hp≤55 mm,0.8≤αp≤1,3個自變量用x1,x2,x3表示。
由于電機模型具有非線性的屬性,且存在交互效應與二次效應,所以選用二階響應模型對響應函數進行逼近,基本模型如下:
y(x)=β0+∑ki=1βixi+∑ki=1βiix2i+∑kilt;jβijxixj+ε。(19)
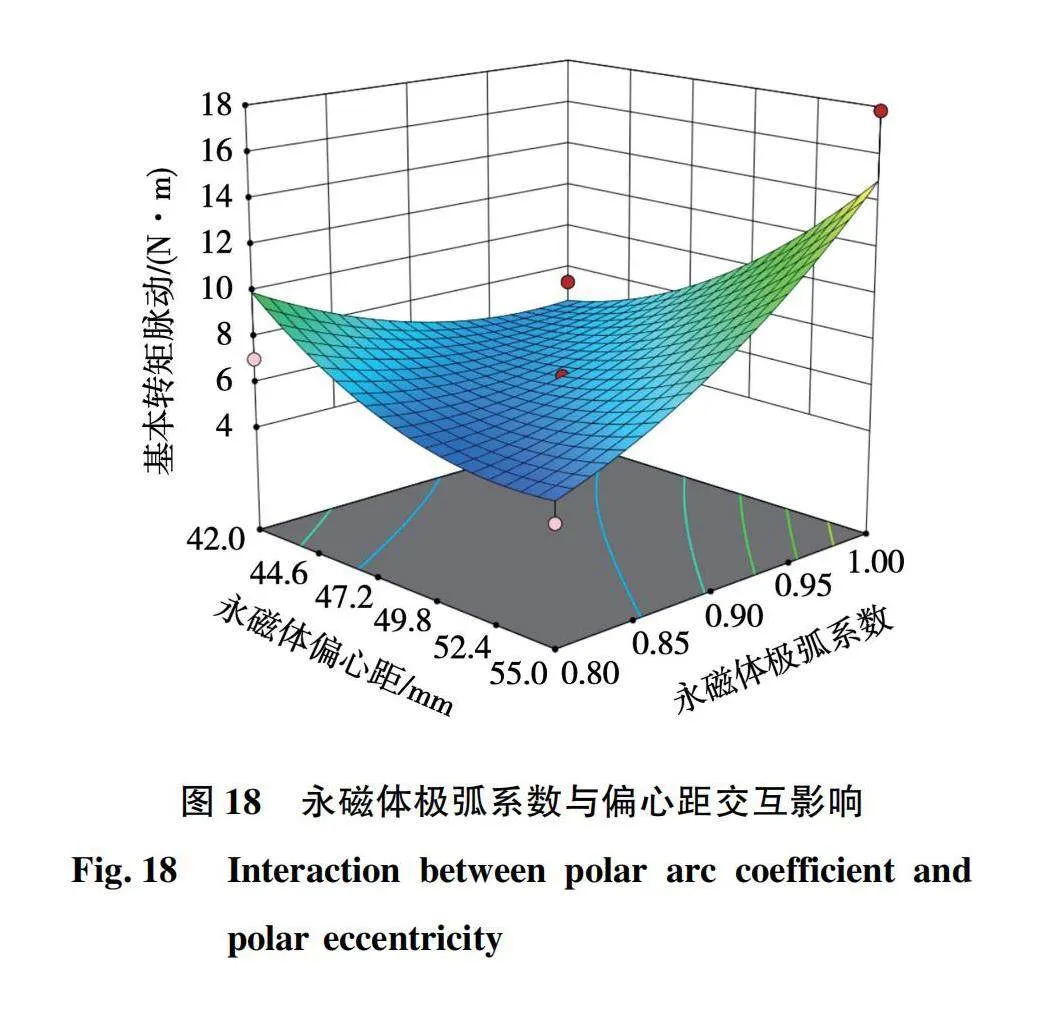
式中:y(x)為目標函數;xi為第i個自變量;βi為xi的線性效應系數;βii為xi的二次效應系數;βij為xi與xj之間的交互效應系數;ε為誤差。使用Design-Expert對模型進行交互試驗,得到3個變量間兩兩交互作用對基本轉矩脈動影響的三維圖如圖16~圖18所示。
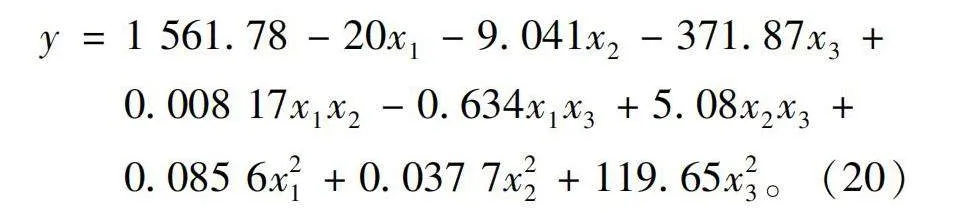
通過軟件對試驗得到的數據進行分析處理,得到電機模型的二階回歸方程為
y=1 561.78-20x1-9.041x2-371.87x3+
0.008 17x1x2-0.634x1x3+5.08x2x3+0.085 6x21+0.037 7x22+119.65x23。(20)
根據回歸方程式(20)對電機進行響應面優化得到的最優尺寸為h=119.5 mm,hp=51 mm,αp=0.96,此時電機基本轉矩脈動降低至4.63 N·m,相較于優化前降低了7.65 N·m。
4.3 優化后性能仿真分析
為檢驗優化效果,對優化前后的電機模型進行有限元仿真分析,對比分析其關鍵性能。
圖19為優化前后的電機空載反電勢波形經過傅里葉分解后得到的各次諧波幅值柱狀圖。由圖19(a)可以看出,優化前A相基波幅值略高于另外兩相基波幅值,基波電勢不對稱度較高。同時諧波以3、9、11次諧波為主,總諧波畸變率為4.2%。圖19(b)顯示優化后三相不對稱度降低,諧波以3次諧波與9次諧波為主,總諧波畸變率為2.9%,較優化前降低31%,空載反電勢性能得到提升。
圖20為優化前后左側電機基本轉矩脈動。從圖中可以看出,經過響應曲面法優化后,電機的基本轉矩脈動由最初的12.74 N·m降低至4.63 N·m,降幅為63.66%,優化效果較為理想。
圖21為優化前后電機驅動轉矩波形圖。優化后左側電機轉矩為88.87 N·m,峰-峰值為5.58 N·m,轉矩脈動為6.28%,相較優化前的16.68%降低了62.35%;優化后右側電機轉矩為52.21 N·m,峰-峰值為4.24 N·m,轉矩脈動為8.12%,相較優化前的21.43%降低了62.11%。可見將響應曲面法用于對電機轉矩脈動進行優化能得到較為理想的優化方案,從而大幅降低電機轉矩脈動。
此外,經過改良后左側電機的驅動轉矩為右側電機的1.7倍,而電機總輸出轉矩相較兩側轉矩相等時基本不變,實現了在不犧牲總輸出轉矩的前提下,兩側轉子驅動非對稱負載的研究目標。
5 結 論
本文基于雙并列轉子永磁同步電機基本原理,對非對稱運行狀態下的電機驅動轉矩解析表達式進行推導,改良其在大偏差角下輸出轉矩降低的缺點。將磁網絡模型與響應面法結合,分析影響轉矩的關鍵因素,對電機轉矩性能提出優化方案。通過對雙并列轉子永磁同步電機的建模分析,得出了以下結論:
1)采用輕載側繞組前置的結構設計,可使電機在轉子偏差角較大的狀態下能夠輸出理想的驅動轉矩,解決因功角變小引起的轉矩下降問題。
2)轉子偏差角除影響磁齒輪轉矩外,還對電機基本轉矩脈動存在影響。在轉子偏差角小于180°電角度的區間內,隨著轉子偏差角的增大,磁齒輪轉矩先增大后減小,基本轉矩脈動始終降低。在設計中要根據需求選取合適的偏差角對兩者進行平衡。
3)對雙并列轉子電機使用響應曲面法進行優化,優化后基本轉矩脈動明顯下降,電機性能得到改善,實現兩側電機輸出不同大小的驅動轉矩的目標,拓寬了雙并列轉子電機的適用范圍。
參 考 文 獻:
[1]ALBERTO P R, FRANCESCO T, GJYLIJE H, et al. Sustainable mechanochemical synthesis of β-cyc-lodextrin polymers by twin screw extrusion[J]. Environmental Science and Pollution Research International, 2021, 29(1): 251.
[2]陳作炳, 付云, 艾佳, 等. 立式紊流攪拌機多相流場及混合性能[J]. 排灌機械工程學報, 2024, 42(7): 678.
CHEN Zuobing, FU Yun, AI Jia, et al. Multiphase flow field and mixing performance of vertical turbulent mixer[J].Journal of Drainage and Irrigation Machinery Engineering,2024,42(7):678.
[3]陳長軍. 現代鋁板帶立輥軋機壓下方案探討[J].有色金屬加工, 2018, 47(5): 61.
CHEN Changjun. Study on vertical rolling mill of modern aluminum plate and strip[J]. Nonferrous Metals Processing, 2018, 47(5): 61.
[4]張炳義,劉忠奇,馮桂宏.潛油螺桿泵直驅細長永磁電機轉軸扭曲對電磁轉矩影響分析[J].電機與控制學報,2016,20(2):76.
ZHANG Bingyi, LIU Zhongqi, FENG Guihong. Analysis of shaft torsion deformation on electromagnetic torque of thin permanent magnet motor for direct-driven submersible screw pump[J]. Electric Machines and Control, 2016, 20(2): 76.
[5]UCHIBORI K, ANDO Y, MURAKAMI I. Assignment of limit torque on cylindrical magnetic gear[J].Journal of the Japan Society of Applied Electromagnetics and Mechanics,2015,23(1):68.
[6]戴思銳, 張炳義, 厲偉, 等. 一種定子連體雙轉子同步并行直驅永磁電機[J]. 電工技術學報,2020,35(10):2107.
DAI Sirui, ZHANG Bingyi, LI Wei, et al. A parallel direct-driven permanent magnet synchronous motor with stator connected dual-rotors synchronous[J]. Transactions of China Electrotechnical Society,2020,35(10):2107.
[7]陶大軍, 陳陽, 李凌霄, 等. MW級雙并列轉子低速永磁直驅電機設計方法與性能分析[J]. 電機與控制學報, 2023, 27(9): 82.
TAO Dajun, CHEN Yang, LI Lingxiao, et al. Design method and performance analysis of MW-level dual-parallel rotor low-speed permanent magnet direct-driven motor[J]. Electric Machines and Control, 2023, 27(9):82.
[8]陳陽, 陶大軍, 王立坤, 等. 雙并列轉子永磁同步電機轉矩脈動產生機理及抑制[J/OL]. 電工技術學報, (2023-12-11)[2024-05-07]. https://doi.org/10.19595/j.cnki.1000-6753.tces.231410.
CHEN Yang, TAO Dajun, WANG Likun, et al. Mechanism and suppression of torque ripple of permanent magnet synchronous motor dual-parallel rotor[J/OL]. Transactions of China Electrotechnical Society, (2023-12-11)[2024-05-07].https://doi.org/10.19595/j.cnki.1000-6753.tces.231410.
[9]黃家楠, 章瑋. 定子連體雙軸永磁電機穩態特性分析[J]. 電機與控制學報, 2023, 27(6): 1.
HUANG Jianan, ZHANG Wei. Analysis of steady state characteristics of connected permanent magnet synchronous motor[J]. Electric Machines and Control, 2023, 27(6): 1.
[10]朱桂華, 張麗欣, 王萬斌, 等. 偏心雙軸攪拌用于污泥攪拌混合的數值模擬[J]. 環境工程學報, 2017, 11(5): 3128.
ZHU Guihua, ZHANG Lixin, WANG Wanbin,et al.Numerical simulation of mixing on sludge with eccentricity double-impeller[J]. Chinese Journal of Environmental Engineering, 2017, 11(5): 3128.
[11]張炳義, 賈宇琪, 馮桂宏. 新型模塊組合式定子永磁電機[J]. 電工技術學報, 2015, 30(12): 243.
ZHANG Bingyi, JIA Yuqi, FENG Guihong. Novel permanent magnet synchronous machines with modules combination stator[J]. Transactions of China Electrotechnical Society, 2015, 30(12): 243.
[12]陳匡非, 杜玉梅. 平行軸永磁齒輪的特性研究[J]. 微特電機, 2004, 32(4): 5.
CHEN Kuangfei, DU Yumei. Study on characteristic of permanent magnetic gear with parallel axis[J]. Small amp; Special Electrical Machines, 2004, 32(4): 5.
[13]LI Jiangang, TAN Qingchang, ZHANG Yongqi, et al. Study on the calculation of magnetic force based on the equivalent magnetic charge method[J]. Physics Procedia, 2012, 129(24): 190.
[14]朱博, 張鈺朋, 徐攀騰, 等. 實現位置同步的雙電機交叉耦合控制策略[J]. 哈爾濱理工大學學報, 2022, 27(5): 114.
ZHU Bo, ZHANG Yupeng, XU Panteng, et al. Cross coupling control strategy of two motors for position synchronization[J]. Journal of Harbin University of Science and Technology, 2022, 27(5):114.
[15]佟文明, 姚穎聰, 李世奇, 等. 考慮磁橋不均勻飽和的內置式永磁同步電機等效磁網絡模型[J]. 電工技術學報,2022,37(12):2961.
TONG Wenming, YAO Yingcong, LI Shiqi, et al. Equivalent magnetic network model for interior permanent magnet machines considering non-uniform saturation of magnetic bridges[J].Transactions of China Electrotechnical Society, 2022, 37(12): 2961.
[16]孔曉光, 劉春浩, 梁文星. 永磁磁阻雙轉子電機結構參數的優化設計[J]. 大電機技術, 2022(5): 8.
KONG Xiaoguang, LIU Chunhao, LIANG Wenxing. Optimal design of structural parameters of permanent magnet reluctance double-rotor motor[J]. Large Electric Machine and Hydraulic Turbine, 2022(5): 8.
(編輯:劉素菊)
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49