基于Arduino單片機與LabVIEW的消防機器人設計
2024-10-25 00:00:00王斌馮爽陳祥
機械制造與自動化 2024年5期
關鍵詞:設計
摘 要:以Arduino UNO單片機為核心控制單元,基于LabVIEW開發平臺設計一款消防機器人。該機器人分為上位機控制系統與下位機控制系統,上位機控制系統由LabVIEW開發環境設計,下位機控制系統由Arduino控制單元、傳感器信息采集模塊、運動模塊、無線通信模塊、滅火模塊、自動避障模塊組成。根據行業標準建立消防機器人原型機并進行測試,測試結果表明:設計的機器人能夠穩定實現各項功能,具有一定的實際應用價值。
關鍵詞:消防機器人;Arduino;LabVIEW;控制系統;設計
中圖分類號:TP273+.5" 文獻標志碼:A" 文章編號:1671-5276(2024)05-0213-05
Design of Fire Fighting Robot Based on Arduino Single-chip and LabVIEW
Abstract:With Arduino UNO being the core control unit, and based on LabVIEW development platform, designs a fire fighting robot, which is divided into upper computer control system and lower computer control system. The upper computer control system was designed by LabVIEW development environment,the lower computer control system was composed of single-chip microcomputer control unit, sensor information acquisition module, motion module, wireless communication module, fire fighting module and automatic obstacle avoidance module. According to the industry standards,the prototype system of fire fighting robot was established and tested. The results show that the designed robot can perform various functions and has certain practical application value.
Keywords:fire fighting robot;Arduino;LabVIEW;control system;design
0 引言
火災現場存在著的高溫、濃煙、各種具有劇毒性、爆炸性的化學品,嚴重威脅著消防人員的生命安全。近年來,消防人員在救災過程中犧牲、致殘的事件高發。因此,研發一款能替代消防人員進入事故現場并能全面地完成偵察、滅火等任務的消防機器人(fire fighting robot)迫在眉睫。
在過去的二十幾年中,各種用途的消防機器人已相繼問世。文獻[1]設計了一種不僅具有強大的爬坡和越障能力還可遠程控制滅火作業的消防滅火機器人。文獻[2]設計了一種可向后方實時顯示火災情況、環境信息和幸存者分布的消防偵察機器人。文獻[3]研發了一種排煙、照明、行走類消防救援機器人。文獻[4]設計了一種具備循跡、路徑規劃[5]與排爆功能的消防排爆機器人。上述機器人往往存在環境檢測項目少、無線通信功能不穩定、只有環境檢測功能而無避障功能,或者只能手動控制而無法自動控制、上位機控制系統接線雜亂、價格昂貴等諸多缺陷。
本文提出一種人機交互性強,操作簡單的集移動、環境檢測、無線數據傳輸、自動避障、滅火等多功能于一體的消防機器人。
1 消防機器人總體設計
1.1 總體方案設計
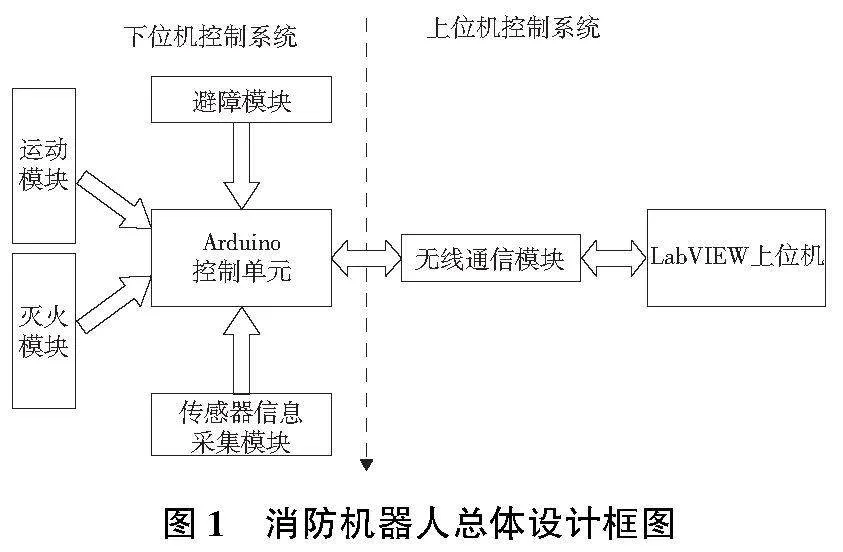
本文設計的消防機器人總體結構如圖1所示,分為上位機控制系統(簡稱上位機)與下位機控制系統(簡稱下位機)兩部分,上位機由LabVIEW開發環境設計,下位機程序由Arduino IDE開發環境設計。下位機由Arduino控制單元、傳感器信息采集模塊、運動模塊、無線通信模塊、避障模塊、滅火模塊組成。上位機與下位機通過無線通信模塊進行通信。
1.2 功能模塊設計
該機器人下位機控制系統由Arduino控制單元、運動模塊、無線通信模塊、避障模塊、傳感器信息采集模塊、滅火模塊組成。上位機控制系統由運動控制模塊、通信模塊、控制方式選擇模塊、滅火控制模塊與環境信息顯示模塊組成。該機器人具有運動(直行、轉彎、爬坡、越障、速度檔位調節)、滅火、環境參數采集(一氧化碳濃度、粉塵濃度、光照強度、溫度、濕度)、無線通信、自動避障等功能。
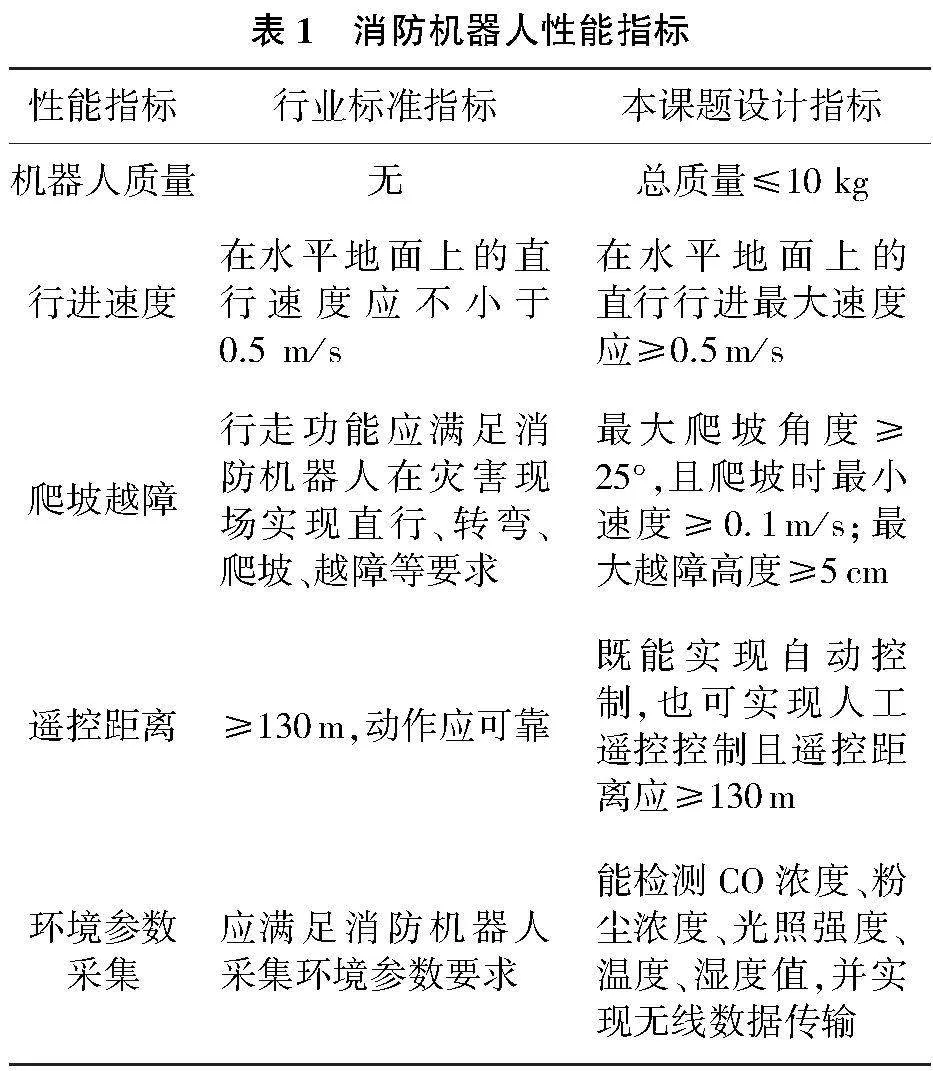
本課題目標為一種能夠替代消防人員進入高溫高壓、地形復雜、含有大量有毒有害氣體的火災事故現場,集移動、環境檢測、無線數據傳輸、滅火等多功能于一體的智能消防機器人。根據消防機器人行業標準,本課題設計的消防機器人應具有的性能指標如表1所示。
2 下位機控制系統設計
2.1 下位機硬件結構總體設計
綜合考慮,本機器人選用Arduino UNO單片機為控制單元。下位機控制系統各模塊通過不同的引腳接口與Arduino UNO單片機連接完成后組成了該消防機器人的硬件結構。
1)Arduino單片機數字I/O口的0、1端口分別連接APC220無線通信模塊的TX與RX端。
2)數字I/O口的2端口連接溫濕度傳感器DATA端;數字3、模擬I/O口的A1端口分別連接粉塵濃度傳感器的LED、OUT端。
3)數字I/O口的10、11、12、13端口分別連接L298P電機驅動器的E1、M1、E2、M2端口;L298P電機驅動器的M1+、M1-、M2+、M2-端分別連接左電機的正極與負極、右電機的正極與負極。
4)數字I/O口的4、5端口分別連接車體左側超聲波傳感器的Echo、Trig端;8、9端口分別連接車體右側超聲波傳感器Echo、Trig端;模擬I/O口的A2端口連接車頭左側紅外測距傳感器的V0端;A3端口連接車頭右側紅外測距傳感器V0端。
5)數字I/O口的6端口連接滅火模塊中繼電器模塊的IN端,繼電器模塊的COM端與NO端分別連接壓力泵的正極與單片機的+5V端,壓力泵的負極接地。
2.2 各硬件模塊選材與設計
1)運動模塊
消防機器人行進的動力由運動模塊提供。該模塊保證了機器人能夠完成除前進、后退、左右轉、速度檔位調節等基本動作外,還能夠完成越障、爬坡等復雜運動。本模塊設計主要分為行進機構設計和電機及其驅動器選擇兩部分。
a)行進機構設計
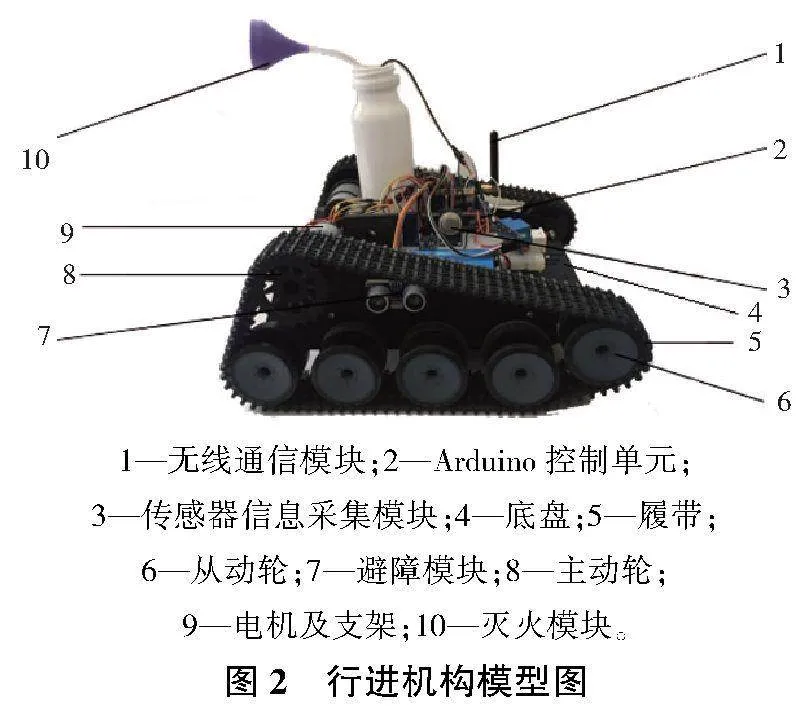
火災事故現場往往存在雜草叢生、大角度陡坡、多障礙物等地形。綜合考慮,履帶式行進機構可滿足本消防機器人設計要求,另外采用直流電機作為該行進機構的動力輸入。消防機器人行進機構模型如圖2所示。該機構由電機與支架、主動輪、從動輪、履帶、底盤組成。
b)電機及其驅動器選擇
根據行業標準,機器人直行最大速度v應不小于0.5m/s(取v=0.5m/s);能以不低于0.1m/s的爬坡速度爬上至少25°的斜坡(取坡角為30°),此處取消防機器人總質量m=10kg。所需的電機功率計算如下(取履帶與地面的滾動摩擦因數為0.2,滑動摩擦因數μ為0.5)。
①機器人若要爬上30°的斜坡,所需牽引力F1(單位:N)為
F1=G·sin30°+μ·G·cos30°=
10×9.8×0.5+0.5×10×9.8×cos30°=91.4(1)
機器人若要以不低于0.1m/s的爬坡速度爬上該斜坡,電機所需的最小功率P1(單位:W)為
P1=F1·v1=91.4×0.1=9.14(2)
②當機器人在平地上做勻速直線運動時,機器人所需牽引力F2(單位:N)為
F2=μ·G=0.2×10×9.8=19.6(3)
機器人若要以v2=0.5m/s速度保持該運動,所需電機功率P2(單位:N)為
P2=F2·v2=9.8(4)
綜上,機器人電機功率需要至少9.8W,牽引力達到91.4N才能滿足設計要求。由于機械設計中存在較大的機械磨損,對實際參數進行選型時一般取2倍的安全系數,故取20W為最低功率。本設計根據機器人機械特性和設計要求選擇了兩臺25W的37GB520直流減速電機。該減速電機輸出的力矩T(單位:N·m)為
T=2.5×9.8×0.01×30=7.35(5)
由力矩公式T=F·r(r為主動輪半徑,測得主動輪直徑為4.5cm,F為推動主動輪的力),可計算出電機經過主動輪帶動履帶的牽引力(單位:N)為
F=T/r=7.35÷(4.5÷2×0.01)
=326.67gt;91.4(6)
由上述計算可知,37GB520直流減速電機滿足設計要求。由于電機額定功率較大,單片機無法直接控制,本設計選用可同時驅動兩臺額定功率25W減速電機的L298P為電機驅動器。
2)無線通信模塊
上下位機之間的相互通信由無線通信模塊實現。根據行業標準,此機器人可實現消防人員遙控控制且遙控距離應≥130m,因此設計無線通信模塊時必須對傳輸距離加以考慮。從傳輸距離和經濟角度考慮,本設計最終選用APC220-43無線數傳模塊為無線傳輸方式。
3)傳感器信息采集模塊
根據設計要求,消防機器人應能檢測火災事故現場的一氧化碳(CO)濃度、粉塵濃度、光照強度、溫度、濕度等信息。為了檢測這些環境信息,本設計選用可同時檢測溫度和濕度的DHT11數字溫濕度傳感器;MQ-5型一氧化碳傳感器檢測事故現場的CO濃度信息;GP2Y1010AU0F粉塵濃度傳感器檢測現場粉塵濃度;GY-30數字光照強度傳感器來檢測事故現場的光照強度信息。
4)避障模塊
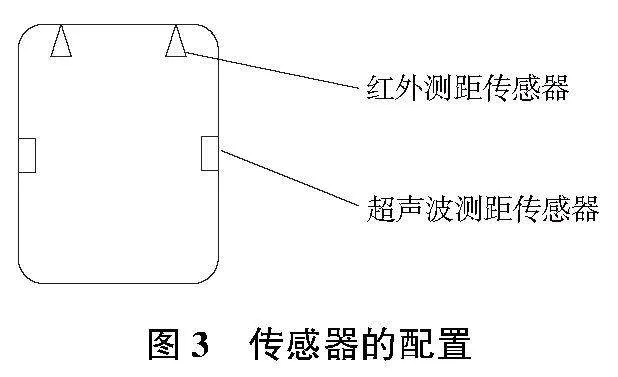
根據設計要求,當消防人員在上位機控制方式選擇自動控制模式時,機器人無需后方消防人員遙控控制,將會自動避障。而自動避障功能的實現由避障模塊完成。本模塊選擇Sharp GP2D12紅外測距傳感器和HC-SR04超聲波傳感器。
如圖3所示,兩個紅外測距傳感器(以三角形表示)布置于機器人車頭左右兩側,兩個超聲波測距傳感器(以長方形表示)布置于車體左右兩側。
5)滅火模塊
消防機器人的滅火功能由滅火模塊實現,該模塊由繼電器模塊、壓力泵、導管、噴嘴、滅火罐組成。其中,壓力泵為5V立式壓力泵,繼電器選用1路5V繼電器驅動模塊,滅火罐中裝有滅火劑。此外,壓力泵與噴嘴通過導管連接。當上位機向滅火模塊發出滅火指令,繼電器接通,壓力泵運行,將滅火罐中的滅火劑噴出,完成滅火過程。
2.3 下位機軟件設計
1)上下位機通信協議
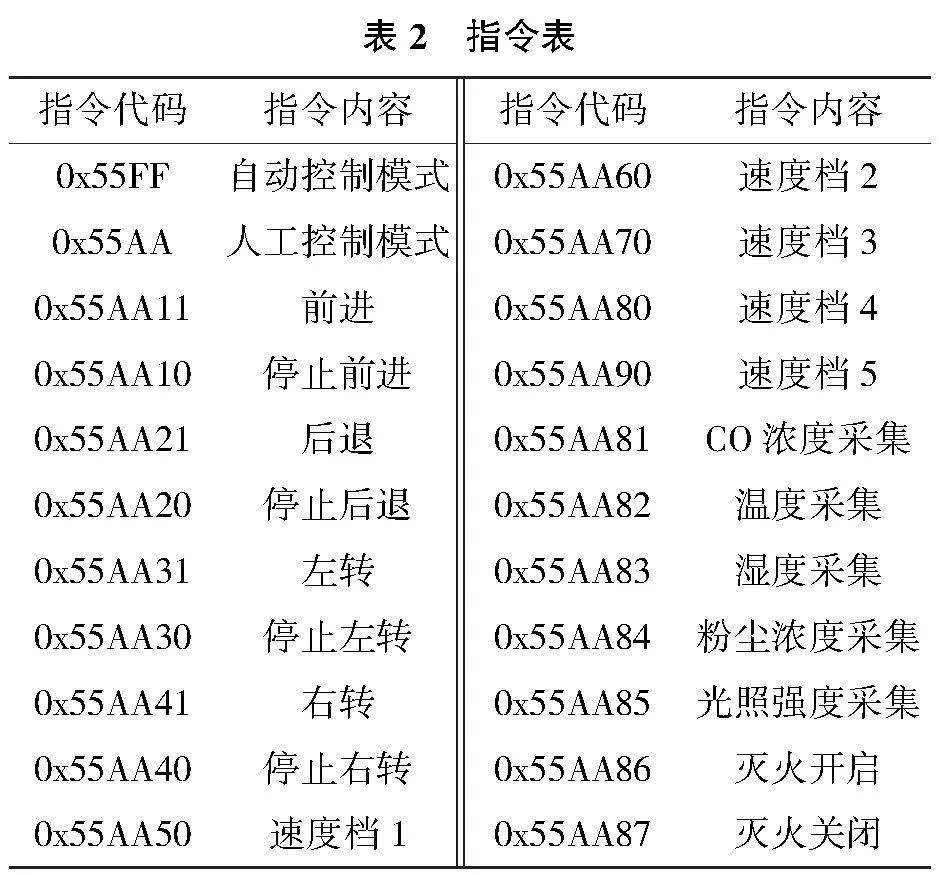
前文已經討論過,該機器人不僅可以實現自動控制也可以實現消防人員遠程人工控制。為了更好地實現上下位機通信,制定指令以如下的通信協議形式發送,即
幀頭+命令碼+操作碼
此處規定0x55為幀頭,0xAA為人工控制模式命令碼,0xFF為自動控制模式命令碼,完整指令如表2所示。
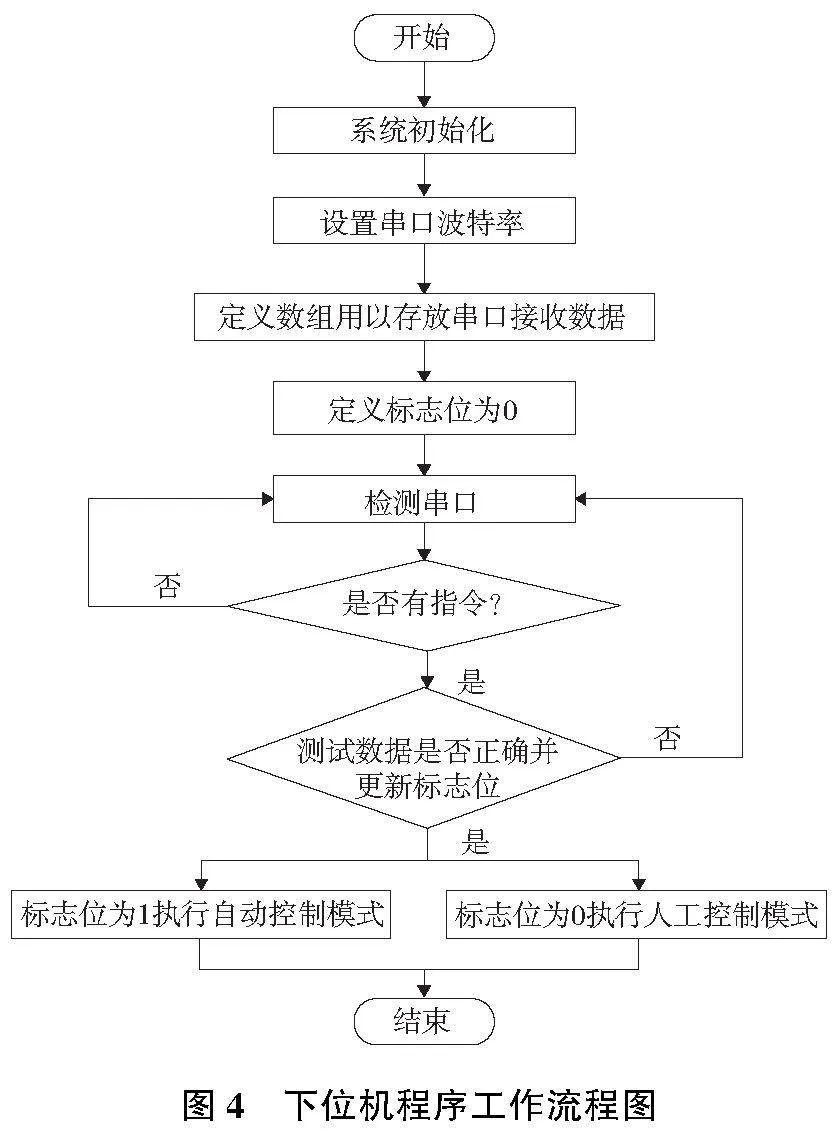
2)下位機程序工作流程
當下位機控制單元收到上位機發送的“0x55AA”指令,表示消防機器人人工控制模式開啟。當下位機控制單元收到上位機發送的“0x55FF”指令,表示消
防機器人自動控制模式開啟,機器人將開啟自動避障功能。人工控制模式需要消防人員通過上位機控制按鈕遠程控制機器人運動模塊完成前進、后退、轉彎、速度檔位調節動作,控制滅火模塊執行滅火等動作,同時下位機也將自動采集環境參數上傳至上位機,具體程序流程如圖4所示。
3 上位機控制系統設計
3.1 系統界面設計
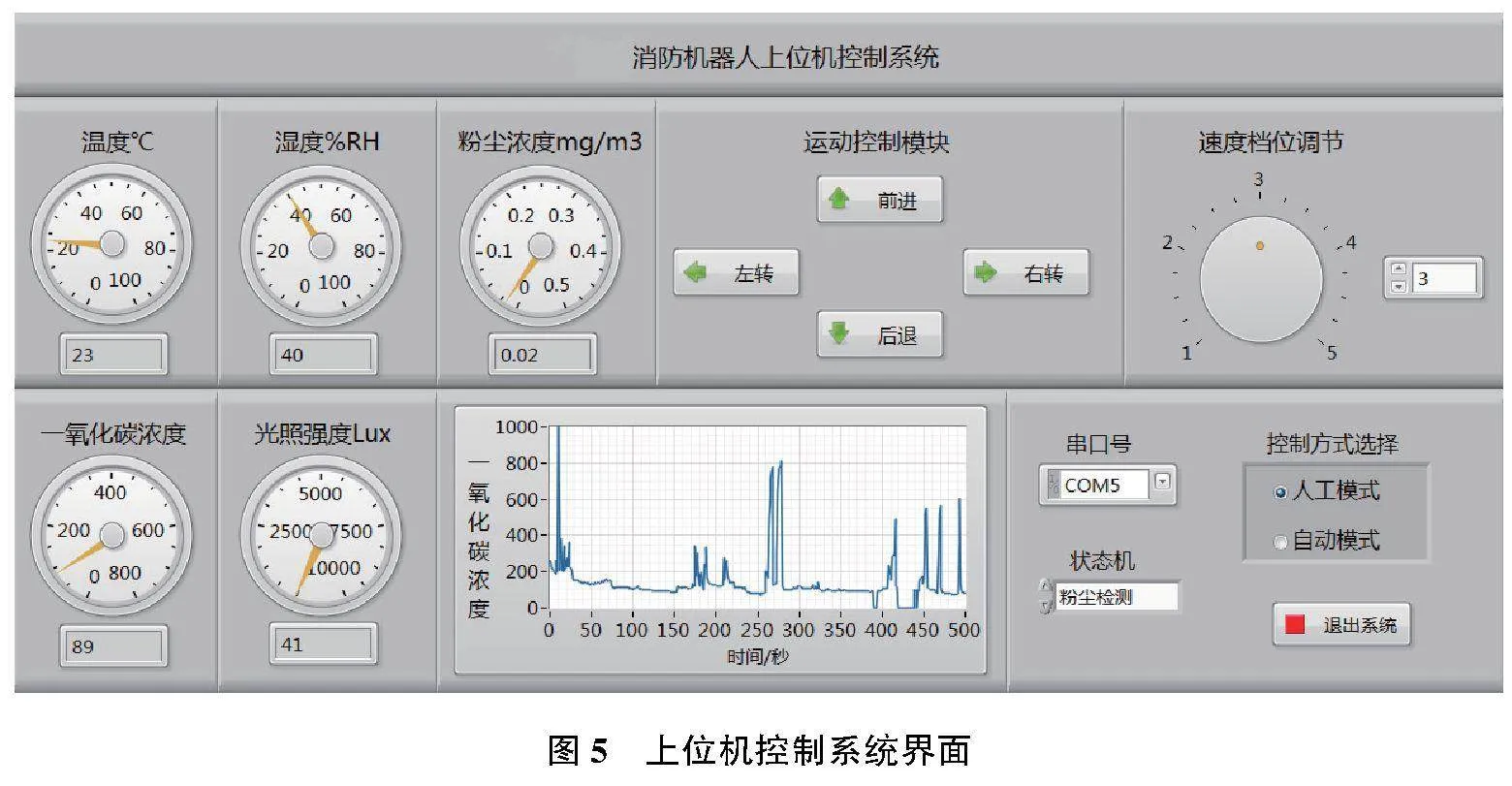
上位機控制系統界面設計主要是指上位機前面板設計,也就是虛擬儀器面板設計。界面設計是為了更好地實現人機交互功能。
圖5所示為上位機前面板即虛擬儀器界面。界面左側的5個儀表盤分別用來顯示事故現場溫度、濕度、粉塵濃度、一氧化碳濃度和光照強度數值,一氧化碳濃度變化趨勢由波形圖顯示。運動控制模塊的4個布爾按鈕分別控制機器人前進、后退、左轉、右轉動作。運動控制模塊右側的速度檔位調節旋鈕可對機器人進行5檔調速。界面右下角的控制方式選項框包含人工模式與自動模式按鈕,用于切換機器人控制方式。控制方式選項框下面的滅火按鈕用于滅火功能。另外串口號選項框用于選擇上下位機通信的串口號,狀態機顯示欄顯示當前檢測何種環境參數。
3.2 系統程序設計
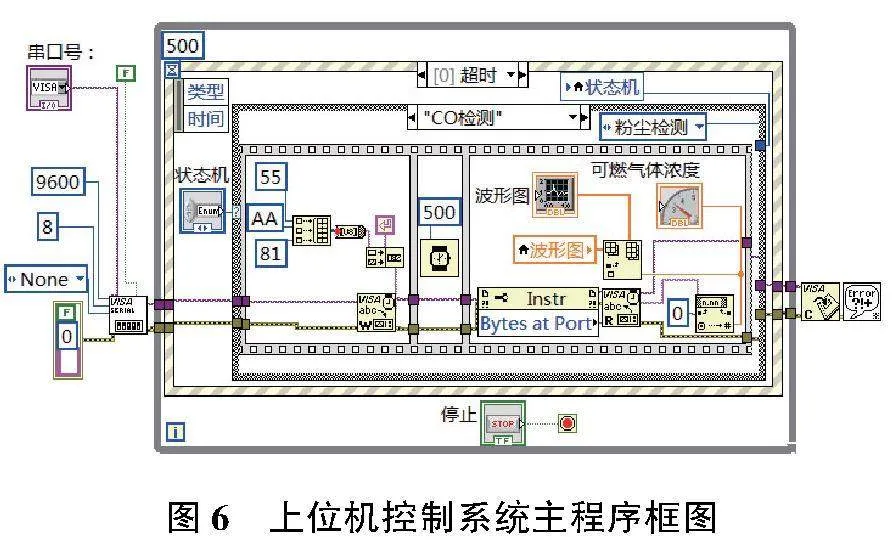
圖6為消防機器人上位機控制系統前面板對應的主程序框圖。由圖可知主程序的結構為順序結構+條件結構+事件結構+While循環。首先串口初始化,波特率為9600b/s;然后,程序進入While循環和事件結構,不斷地檢測是否有事件得到響應;事件結構有“模式切換”、“前進”、“后退”、“左轉”、“右轉”、“速度檔位”、“超時”等。
4 消防機器人實現與性能測試
4.1 消防機器人實現
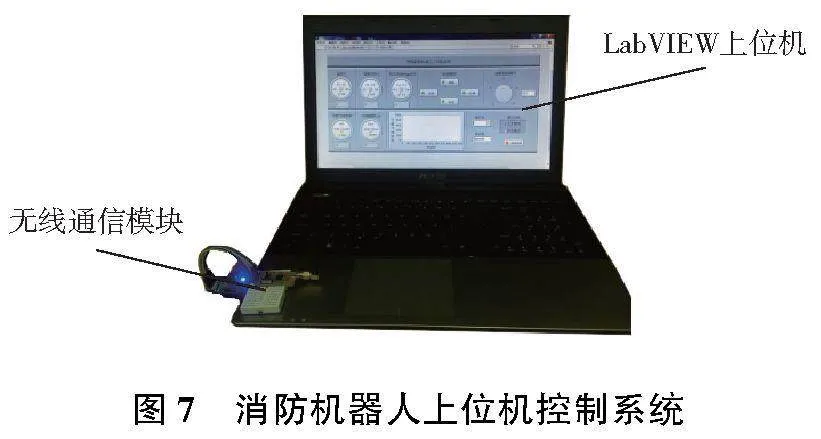
圖2中也顯示了消防機器人縮小版原型機下位機控制系統硬件總體結構。圖7所示為消防機器人原型機上位機控制系統,下位機與上位機通過APC220無線通信模塊實現無線通信。
4.2 消防機器人性能測試
根據消防機器人行業標準中的測試方法,本設計對消防機器人原型機的運動(直行、轉彎、爬坡、越障、速度檔位調節)性能、環境信息檢測(一氧化碳濃度、粉塵濃度、光照強度、溫度、濕度)性能以及自動避障性能進行測試。因篇幅有限,本文只對消防機器人環境信息檢測性能測試進行詳細闡述。
圖5中還顯示了環境信息檢測性能測試結果,由圖可知:此時消防機器人所測溫度為23℃、濕度為40%、粉塵濃度為0.02mg/m3、一氧化碳濃度數值為89mg/m3、光照強度為41Lux;波形圖所示為500s內的一氧化碳濃度數值變化趨勢。
測試結果表明:機器人直線前進的最高速度約為0.55m/s;可實現5檔調速,分別為第1檔0.15m/s、第2檔0.25m/s、第3檔0.35m/s、第4檔0.45m/s、第5檔0.55m/s;能以0.15m/s的速度爬上30°的斜坡;可越過5.3cm高的障礙;能檢測CO濃度、粉塵濃度、光照強度、溫度、濕度5種環境參數,并實現了實時無線數據傳輸,傳輸距離最遠可達300m;能實現系統所設計的自動避障功能。因此所設計的消防機器人滿足性能指標要求。
5 結語
本文基于Arduino單片機與LabVIEW開發環境,設計了一款能夠替代消防人員進入事故現場,集移動、環境檢測、無線數據傳輸、自動避障、滅火等多功能于一體的消防機器人。該機器人有效彌補了目前消防機器人普遍存在的環境檢測項目少、無線通信功能不穩定、只可手動控制而不可自動控制、上位機控制系統接線雜亂、價格昂貴等諸多缺陷,同時該機器人的成功研制對于Arduino單片機與LabVIEW在其他領域的應用有一定的參考價值。
參考文獻:
[1] 黃小龍,郭一冉,高陽臻,等. 消防機器人研究進展與分析[J]. 消防科學與技術,2021,40(10):1501-1504.
[2] 王勇,劉菲菲,傅建橋,等. 消防偵察機器人的設計與實現[J]. 東華大學學報(自然科學版),2018,44(4):630-634.
[3] 吳儉濤,孫利,余慧,等. 消防救援機器人造型設計[J]. 機械設計,2021,38(11):9-12.
[4] 劉孝賢,余江,鄭徐凱,等. 基于STM32的全地形越障排爆機器人設計[J]. 機械,2022,49(9):76-80.
[5] 張慧賢,楊海軍,馬利民,等. 消防機器人作業環境智能感知與識別關鍵技術[J]. 機械制造與自動化,2021,50(6):186-189.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04