基于改進YOLOv3目標檢測算法的船舶運載貨物自動識別研究
2024-10-09 00:00:00侯國佼孫榮肖圣魁李雯張棟
數字通信世界 2024年9期
摘要:船舶貨物自動識別高精度數據獲取難,影響檢測性能。該文利用弱監督至全監督框架,結合改進算法構建組合框架,平均識別精度達32.0%,定位精度達73.8%,高于對比方法。該框架在弱監督環境下表現優異,適用于船舶貨物自動識別。
關鍵詞:YOLOv3;弱監督;船舶運載;候選區域
doi:10.3969/J.ISSN.1672-7274.2024.09.001
中圖分類號:TP 391.41 文獻標志碼:A 文章編碼:1672-7274(2024)09-000-03
Research on Automatic Identification of Ship Cargo Based on Improved YOLOv3 Object Detection Algorithm
HOU Guojiao1, SUN Rong1, XIAO Shengkui1, LI Wen1, ZHANG Dong2
(1. The Navigation Authority of Yangtze Gorges, Yichang 443002, China;
2. Hunan Tianxiakuan Information Technology Co., Ltd., Changsha 410000, China)
Abstract: The difficulty in obtaining high-precision data for automatic identification of ship cargo affects the detection performance. This study utilizes a weak supervision to full supervision framework combined with improved algorithms to construct a combined framework. The average recognition accuracy reaches 32.0%, and the positioning accuracy reaches 73.8%, which is higher than the comparison methods. This framework performs excellently in a weak supervision environment and is suitable for automatic identification of ship cargo.
Keywords: YOLOv3; weak supervision; ship transportation; candidate region
0 引言
在船舶貨物自動識別領域,視覺圖像的檢測識別扮演著核心角色,而人工智能算法的興起為此提供了新的思路[1]。隨著技術革新,目標檢測算法已廣泛應用于船運調度系統,顯著減少了貨物分揀與調度的時間與誤差,實現了高效智能化與自動化處理[2]。在眾多算法中,基于監督學習的目標檢測算法逐漸成為航運調度的主流技術。盡管現有監督學習方法在多種船舶調度場景中表現出色,但構建高精度、全監督特征的檢測模型仍需大量帶有真實框架和分類標記的樣本[3-4]。雙階段方法雖有效,但實際應用復雜且耗時低效,而單階段方法,如YOLO系列算法,則較好地解決了這一問題[5-6]。
1 基于改進YOLOv3與PGE-L算法的船舶運載貨物自動識別分析
1.1 基于PGE-L算法的候選區域生成研究
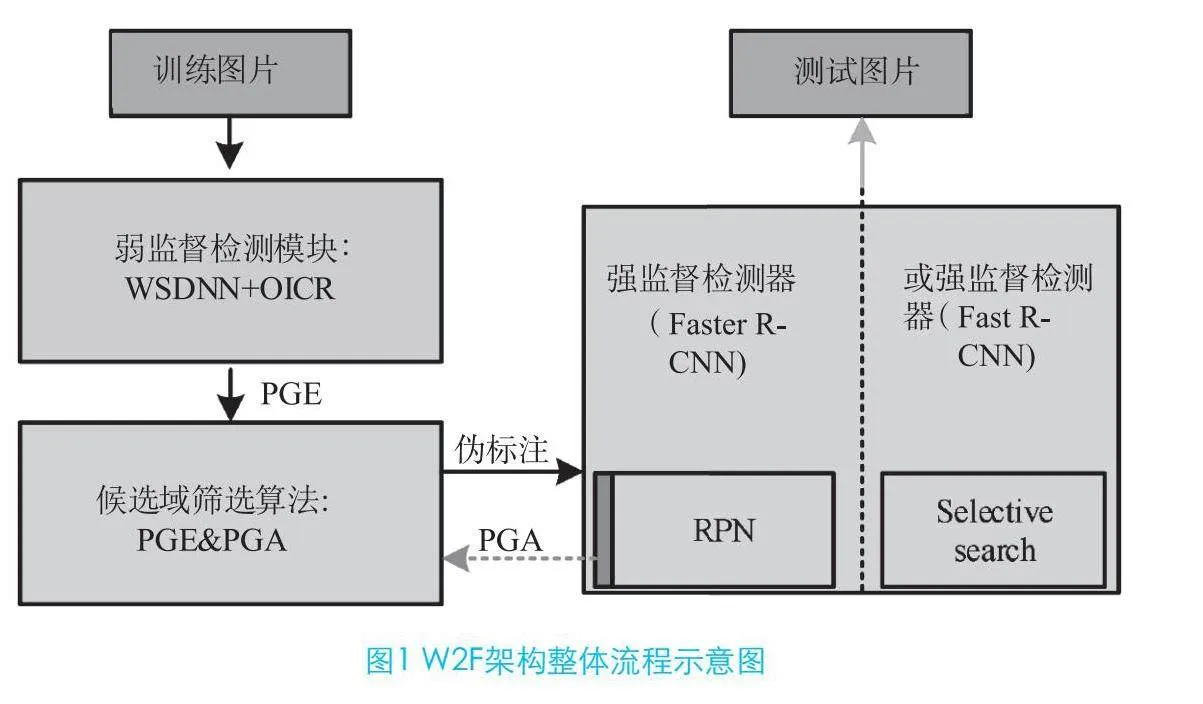
為解決航運船舶運載貨物自動識別的高精度數據集獲取困難問題,本文采用弱監督到全監督的基準框架,結合改進候選域算法和改進YOLOv3形成組合框架,實現船舶運載貨物自動識別。考慮到實際的航運調度運用場景,將弱監督到全監督(Weak Supervision to Full Supervision,W2F)架構作為實際分析的基線,其架構整體流程示意圖如圖1所示。
在圖1中,整體流程始于輸入已標注的圖像等級示例數據。隨后,將弱監督深度神經網絡(WSDNN)與在線實例分類器優化(OICR)策略相結合,生成多尺度候選域,并通過有標簽的圖像樣本進行訓練。為解決緊包框分數過低導致學習方向偏差的問題,引入了PGE算法。該算法生成的緊包框被用作偽標簽,進而僅需將這些緊包框送入強監督檢測器進行訓練。在兩級監督目標檢測階段,利用區域建議網絡(RPN)進行進一步篩選,此過程依據偽地面實況改編算法(PGA)針對PGE算法傳遞的候選域進行,并對模型進行訓練。針對PGE算法在交疊目標探測上的不足,研究進行了改進,提出了PGE-L算法。該改進主要針對現有非極大抑制算法及其變體受交并比值限制的問題,通過計算L值來替代交并比值,衡量候選域間的交并位置信息。L值通過評估兩個候選域間的相似度來確定其實際的交并情況,從而提升了算法在交疊目標探測上的準確性。因此,假定存在兩個候選域,則其實際位置信息左上角與右下角的相關坐標表達如式(1)所示。
(1)
式中,和分別表示兩個候選域;、和、分別表示候選域和左上角的橫縱坐標;、和、為右下角的橫縱坐標。L值的計算表達如式(2)所示。
(2)
式中,表示兩個候選域的L值,即L1范數。原始信息標準化處理表達如式(3)所示。
(3)
式中,表示標準化處理后的值;表示原始數據量。相應轉換函數表達如式(4)所示。
(4)
式中,表示附加L值的權重分數;表示分類置信度。在PGE-L算法的工作流程中,首先使用L算法替代非極大抑制,不依賴交并比,并在緊包框產生時立即刪除。在沒有緊包框的條件下,使用PGE算法的步驟,通過循環迭代合并較大區別框,作為目標的最小外包矩形框架。
1.2 改進YOLOv3結合PGE-L算法的RPY框架分析
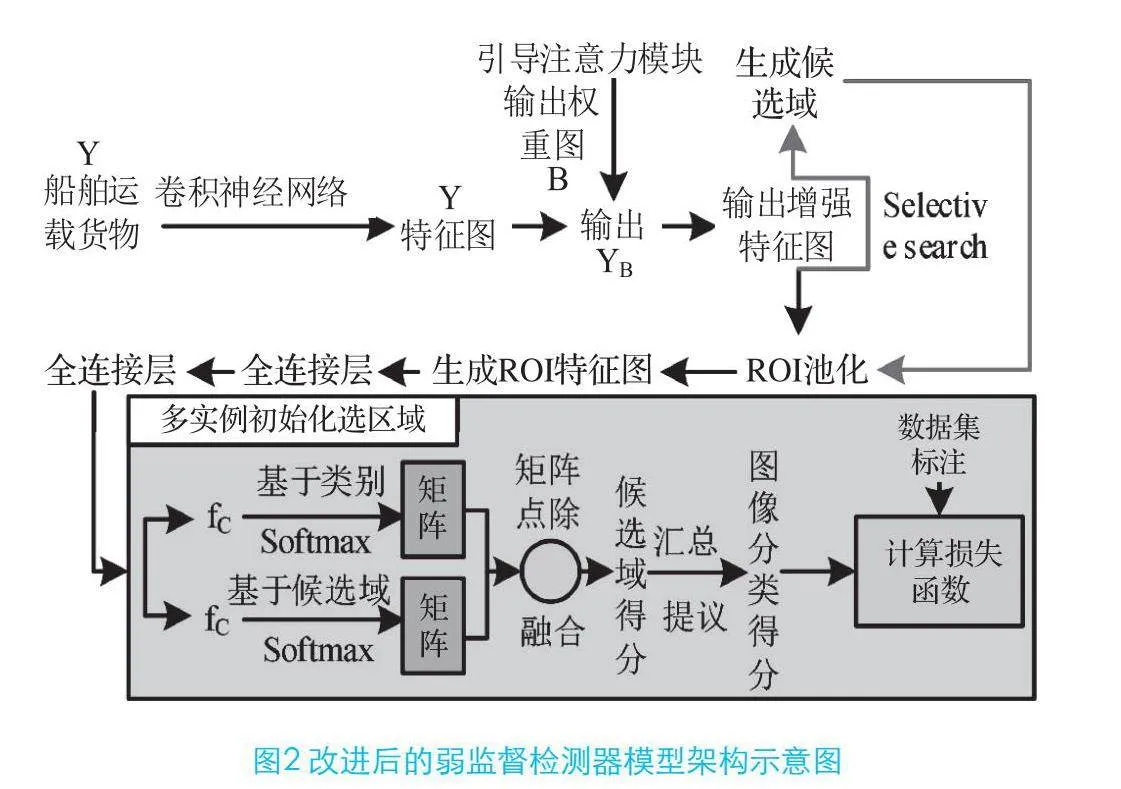
在PGE-L算法的基礎上,本文利用注意力機制來對弱監督檢測器進行優化設計,以此構建一種無須進行相關預訓練的用于弱監督檢測的在線特征提取方法,本文將其命名為Rre-Attention。同時,將其與PGE-L算法和改進的YLOLv3模型進行組合,由此構成RPY框架。研究通過利用引入注意力分塊的方法,使模型只保留被關注對象的所有有價值的信息,從而實現對網絡資源的合理配置并提高模型的性能,進而使弱監督檢測器更高效地實現對整個目標的檢測。改進后的弱監督檢測器模型的架構如圖2所示。
從圖2可知,改進后的弱監督檢測器模型巧妙地引入了提示注意機制,該機制運用選擇性檢索策略生成候選點,并整合關注區域(ROI)與增強特性圖,進而導出ROI特征圖。此模型還融合了引導注意力分塊與ROI池化后的特征圖,以提煉ROI特征。同時,模型摒棄了原有的回歸分支,避免了對多個實例性分支的優化,轉而采用PGE-L算法對候選區域進行精細調整與過濾。本文選用YOLOv3作為強監督檢測器,并輔以PGA算法進行微調,旨在提升目標檢測的精度。在航運調度系統中,模型首先利用Rre-Attention生成圖像級候選點,再經PGE-L算法過濾,得到緊包框作為實際對象標記,從而實現高效、精準的貨物識別與處理。
2 RPY框架在船舶運載貨物自動識別中的實驗分析
2.1 RPY框架各部分實驗驗證
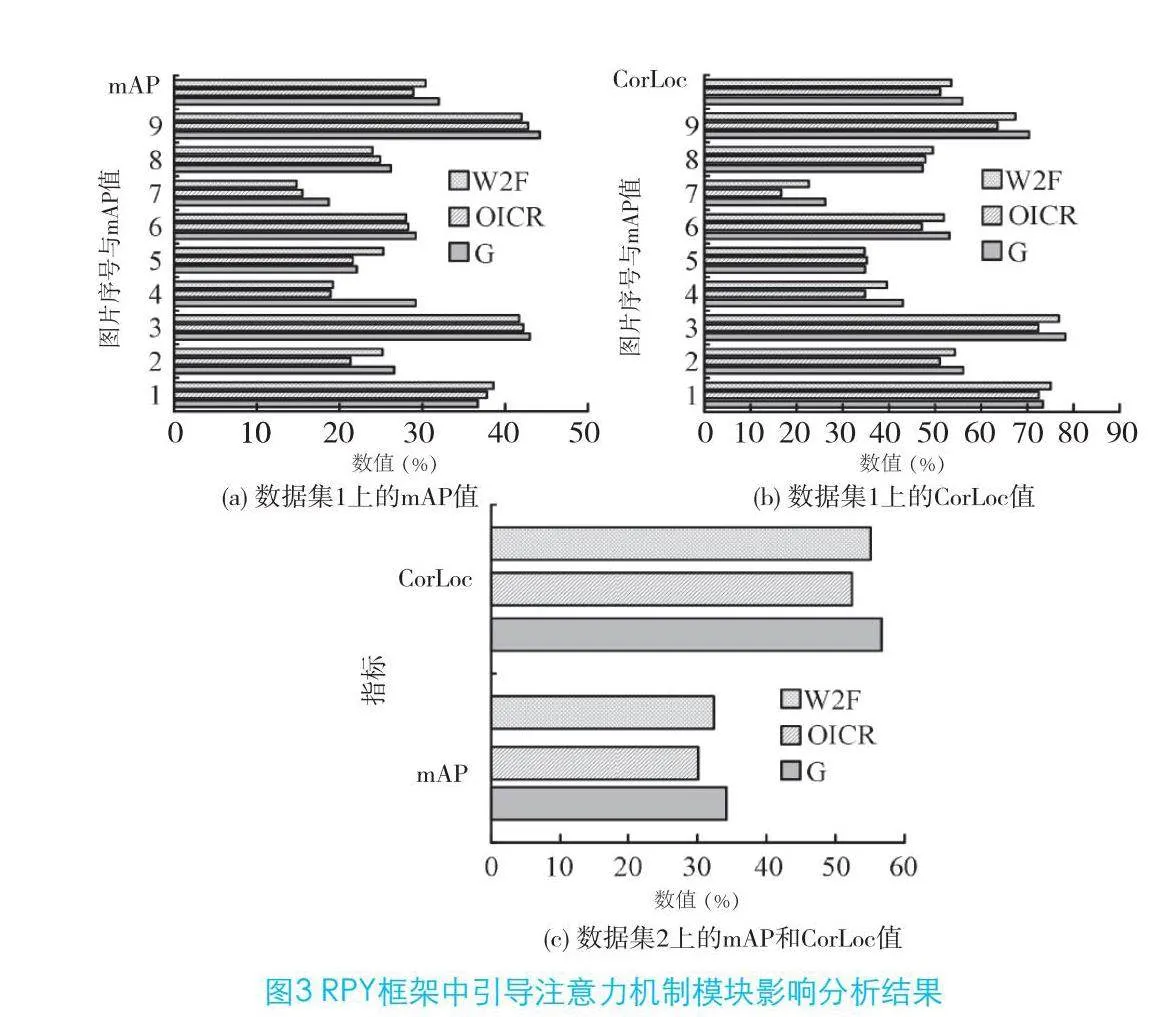
為了驗證RPY框架的有效性,本文對每個模塊進行實驗驗證。實驗中選擇數據對象類2007/2012(Visual Object Classes,VOC 2007/2012)兩個數據集(分別命名為數據集1和數據集2)。數據集1選擇5 000張圖片作為訓練集,數據集2選擇11 000張圖片作為訓練集,而評價指標選擇全類平均精確度(mean Average Precision,mAP)和平均定位準確率(CorLoc)。其中,在引導注意力機制的影響分析實驗中,將引入引導注意力機制的相關弱監督檢測模塊設定為G,其結果如圖3所示。
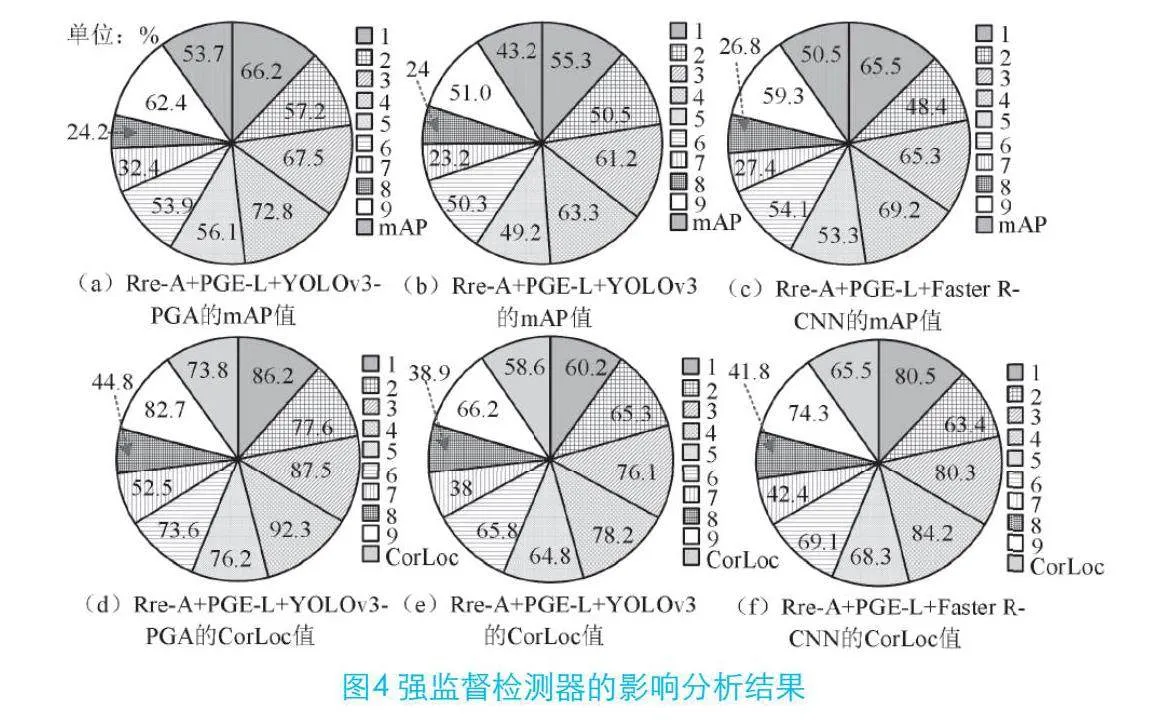
圖3中,1~9分別表示數據集中的不同圖片。數據集1中G模塊所有圖片中最高識別檢測準確率為47.0%,最低準確率為13.9%,而mAP值為32.0%,相對于W2F來說實際性能增加了1.6%,相對于OICR來講實際性能增加了3.1%。而在CorLoc對比中,G模塊的CorLoc值達到55.9%,顯著高于OICR的51.1%和W2F的53.5%。在數據集2中G模塊的mAP值和CorLoc值分別為34.2%和56.7%,均高于對比模塊。研究引入的G模塊對于航運調度系統而言基本達到實際滿意程度。PGE-L算法不僅篩選精度優于PGE,而且在實際的篩選速度上也顯著優于PGE,表明其具備有效性。強監督檢測器的影響分析結果如圖4所示。
圖4中,數據集1中YOLOv3-PGA模塊后的RPY框架的mAP值為53.7%,高于使用YOLOv3模塊的框架的43.2%和采用快速循環神經網絡(Faster Recurrent Neural Network,Faster R-CNN)的50.5%。其CorLoc值為73.8%,顯著優于對比方法的58.6%和65.5%。YOLOv3-PGA模塊對RPY框架的貢獻是十分明顯的,表明了本文對YOLOv3算法進行改進的做法具備有效性。
2.2 RPY框架整體實驗驗證分析
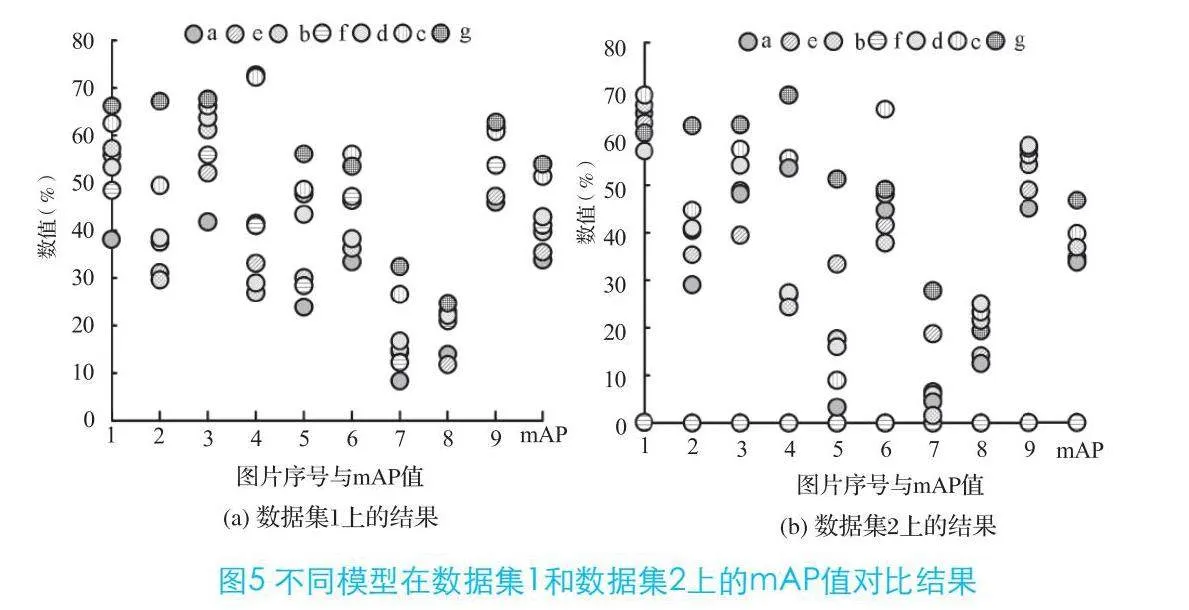
對比模型包含圖中的WSDDN、OICR以及W2F,并額外引入提議集群學習(Proposal Cluster Learning,PCL)、弱監督定位的上下文感知深度網絡模型(Context-Awar-e Deep Network Models for Weakly Supervised Localization,ContextLocNet)以及弱監督級聯卷積網絡模型(Weakly Supervised Cascaded Convolutional Networks,WCNN),將mAP值設定為a~f,RPY設定為g。不同模型的mAP值對比結果如圖5所示。
圖5中,數據集1中研究提出的RPY的mAP值為53.7%。數據集2中RPY的mAP值為49.5%。W2F和RPY均是從弱監督過渡到強監督的弱監督檢測器,二者的數值顯著優于傳統的相關弱監督檢測模型。因此可以判定從相關弱監督中生成相應的偽標注并將其輸入強監督中,以此來進行相應回歸的解決思路在理論上是可行且有效的。
3 結束語
針對當前航運調度系統模塊中船舶運載貨物自動識別中的高精度數據集獲取十分困難的問題,本文利用弱監督到全監督的基準框架與改進YOLOv3來構建了RPY框架。本文構建的組合框架在船舶運載貨物自動識別中具備有效性和實用性。
參考文獻
[1] 王婕佳.貿易便利化對我國跨境電商出口的實證研究[J].經濟學,2021(4):60-63.
[2] Cheah L, Huang Q. Comparative carbon footprint assessment of cross-border e-commerce shipping options[J]. Transportation Research Record, 2022(1): 584-595.
[3] 周凌翱.基于ARM的高精度船舶恒溫運輸系統[J].艦船科學技術, 2022(13):162-165.
[4] 范曉飚,衛澤亮,程志友,等.基于AHP的龍門吊船裝卸貨物作業安全風險分析[J].重慶交通大學學報(自然科學版), 2022(3):143-148.
[5] 黎峰,沈立寧,李健,等.散貨船快速改裝運載集裝箱的系固設計及應用[J].船海工程, 2023(1):30-35.
[6] 許偉,熊衛華.一種改進的輕量級垃圾目標檢測算法[J].計算機技術與發展, 2022(2):63-68.