基于GNSS高精度定位技術的壓路機無人駕駛控制系統研究
2024-09-26 00:00:00王彤周春風
交通科技與管理 2024年17期
摘要 文章根據壓路機自身的特點,結合碾壓作業的過程,首先研究了無人駕駛壓路機控制系統,形成了無人駕駛控制系統框架,開發了適用于無人駕駛壓路機的路徑規劃與導航補償系統;然后針對施工安全,研發了壓路機主動防撞預警系統,并根據不同情況下的作業情況,以壓路機為中心將施工區域劃分為不同風險等級;最后根據分析等級,制定了作業區內移動障礙物的避讓控制策略,保障壓路機無人作業時的安全。
關鍵詞 無人駕駛;自動化作業;高精度定位;壓路機
中圖分類號 U416.217 文獻標識碼 A 文章編號 2096-8949(2024)17-0065-03
0 引言
在無人施工機械領域,歐美發展較早、技術較為成熟,國外頂尖廠商有小松、卡特彼勒等[1]。1995年,小松開發出遙控距離達1.8 km的推土機,可通過通信衛星進行管理控制,編制遠程土方作業系統,曾應用于清除富根火山噴發產生的火山巖[2]。美國卡特彼勒公司在2002年申請了關于基于示教再現的自動裝載技術專利,利用控制器發送信號觸發挖掘機進入示教或再現模式[3]。國內對工程機械自動控制技術的研究起步相對較晚,總體發展水平也落后于歐美發達國家。國內的研究單位主要有清華大學、同濟大學、國防科技大學、浙江大學、徐工集團工程機械股份有限公司、三一集團有限公司等機構[4]。早在2002年,國內就出現了第一款W102DZ型高性能無人駕駛振動壓路機,基本實現了壓路機上電、點火、啟動和熄火的遠程控制,以及行駛速度調節、倒車和轉向的人工遙控。但是,整體上無人駕駛壓路機的應用,還未形成成套的改造流程和施工工藝,施工期的安全問題也一直備受關注[5]。
1 無人駕駛控制系統總體設計
1.1 壓路機無人駕駛工作原理
無人駕駛壓路機是綜合利用高精度GNSS定位技術、障礙物識別技術,在壓路機上安裝衛星接收機、微波通信主機、電臺信號接收天線;在行車/倒車系統上安裝自動控制裝置,在油路系統上設置油路自動控制裝置;在轉向系統上設置轉向控制電機和電磁閥裝置等,通過工業計算機內設置的處理器、程序軟件、交換機等組件實現壓路機自動按照既定的行駛軌跡、轉向、變道、速度、遍數等,完成各類作業任務,達到壓路機無人施工的效果。
1.2 系統總體設計
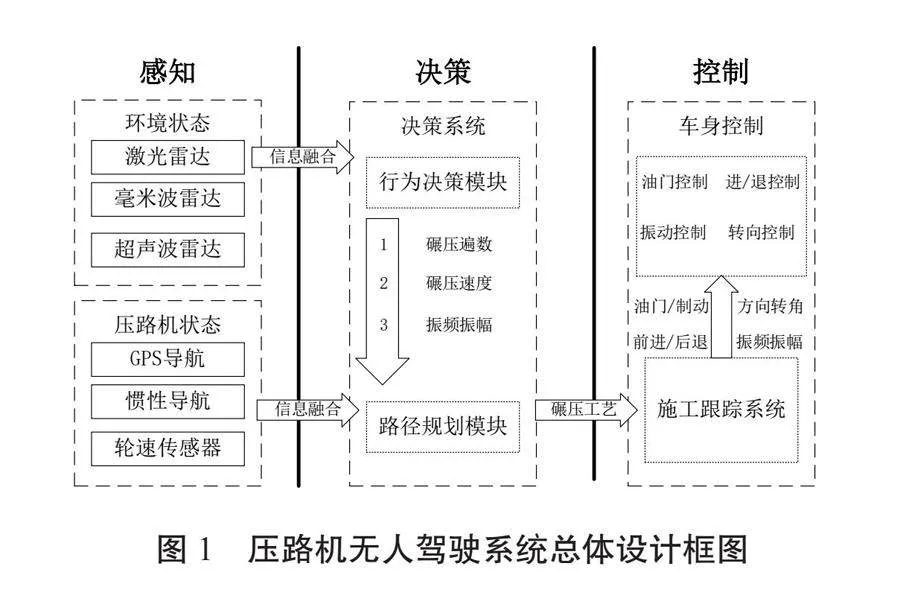
根據無人駕駛壓路機工作原理,無人控制系統包含環境感知模塊、決策規劃模塊和運動控制模塊等三部分,圖1為壓路機無人駕駛系統總體設計框圖:
環境感知模塊主要作用是利用激光雷達、毫米波雷達、超聲波雷達獲取并處理壓路機周圍的環境信息,為無人駕駛系統提供施工環境的關鍵信息。
決策規劃模塊主要作用是綜合施工環境信息及壓路機車身信息,對壓路機的行為進行決策,同時根據碾壓施工工藝進行碾壓路徑規劃,為運動控制模塊控制壓路機提供指導。
運動控制模塊主要作用是接收決策規劃模塊的指令并控制車輛響應,保證控制精度,對壓路機目標碾壓速度、碾壓遍數、碾壓軌跡、振頻、振幅等進行控制。
2 路徑規劃與導航補償系統研究
2.1 壓路機施工路徑規劃方法
無人駕駛壓路機在無人碾壓作業時的路徑規劃,是影響整體碾壓作業質量和施工精度的重要因素。一般路基施工段落近似矩形,其邊界相對規則,將其定義為簡單邊界,采用幾何算法最為有效,通過RTK測量施工區域四個轉角點的坐標,以獲得壓路機作業區的邊界圍欄,并將作業區劃分為多個并行的碾壓道,壓路機在任一碾壓道的起始端和終止端之間按預設的碾壓遍數行駛,控制壓路機的施工路徑。
2.2 路徑導航補償系統
壓路機作業過程中,工作面狀況惡劣時將引起車身傾斜、振動,導致GNSS定位位置與車身實際位置存在偏移,影響作業精度。由于壓路機為鉸接轉向形式,在壓路機作業路徑跟蹤控制的過程中,可利用角度編碼器采集鋼輪與車身之間的轉角信息,以檢測車身位姿。在振動鋼輪一側安裝傾角傳感器,采集車身傾斜導致的GNSS定位位置與車身實際位置的偏移。由此,形成壓路機的行駛矯正信息,從而可根據矯正信息調整壓路機的行駛控制指令。
根據以上原理,路徑導航補償系統主要由控制器、導航系統、角度編碼器以及傾角傳感器組成。其中,控制器與導航系統、角度編碼器以及傾角傳感器采用通信連接,角度編碼器設置于壓路機車身與鋼輪的鉸接點、傾角傳感器設置于壓路機鋼輪的一側。若鋼輪與車身的夾角超過閾值,即夾角差值不滿足預設夾角的差值范圍,則表示壓路機轉向角度過大或者過小,則需要對壓路機進行轉向調節;若傾斜角超過閾值,即傾斜差值不滿足預設傾斜的差值范圍時,則表示壓路機鋼輪偏離原始預設的碾壓軌跡,需要對壓路機進行轉向調節。
3 環境感知與主動防撞系統研究
無人駕駛壓路機最大特點是實現了路基碾壓的無人化施工,避免了人為因素對施工質量的影響,可在夜間施工,能夠有效縮短工期。由于壓路機處于無人控制狀態,遇到緊急情況無法模仿駕駛人員采取多方面的緊急措施,因此無人駕駛壓路機的施工安全是必須解決的問題。一般情況下壓路機在碾壓過程中,施工工作面不會出現固定障礙物,只有可以移動的生命體障礙物,如施工人員、施工區域過往的人員、附近村鎮的牲畜等,因此環境感知與主動防撞系統需要對移動障礙物進行智能識別并進行避讓。路基在碾壓過程中的行駛受碾壓工藝的控制,有固定的軌跡和遍數,遇到移動障礙物,不能選擇繞行,否則會造成其他區域的過壓,或者正常施工路線的漏壓,造成施工質量存在缺陷。因此無人駕駛壓路機只能采取制動措施,等到移動障礙物離開或遠離后,才能重新啟動,繼續工作。由于壓路機自重較大,如果在路基工作面上采取緊急制動措施,會造成路基填土擁集,導致碾壓后的路基出現波浪,因此無人駕駛壓路機在遇到移動障礙物時應有反應區域,使壓路機平穩減速,直到在障礙物前方一定距離內實現平穩制動。
3.1 環境感知與主動防撞系統組成
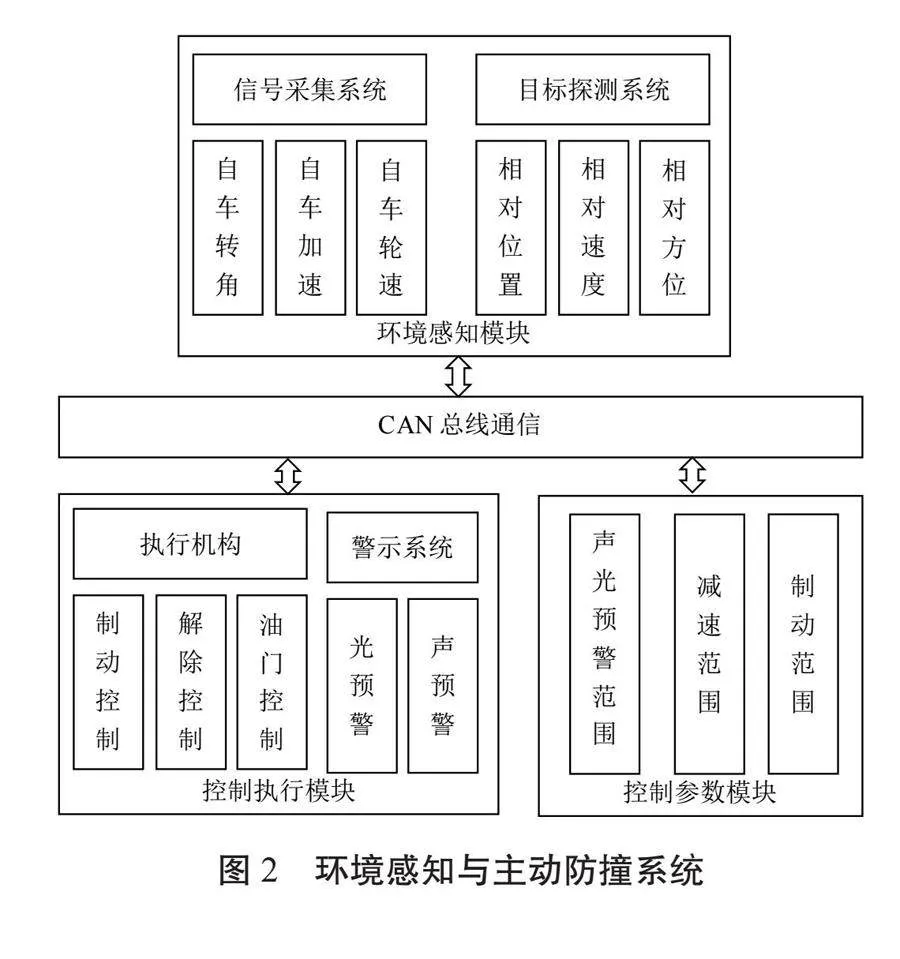
無人駕駛壓路機環境感知與主動防撞系統主要有環境感知模塊、控制參數模塊、控制執行模塊等組成,每個模塊具有不同功能,各個模塊共同工作實現壓路機的主動防撞。環境感知模塊對自車及移動障礙物進行探測,將得到的信息通過CAN總線傳送至控制參數模塊;控制參數模塊根據得到的信息進行危險判斷,并將相應的控制指令通過CAN總線傳送至控制執行模塊;控制執行模塊實行報警、制動等控制動作,最終實現壓路機的安全施工。環境感知與主動防撞系統組成部分如圖2所示:
圖2 環境感知與主動防撞系統
(1)環境感知模塊
環境感知模塊主要通過目標探測傳感器對目標進行探測,得到壓路機與障礙物的相對位置、相對速度及相對方位等信息;利用壓路機的各種傳感器對壓路機的速度、加速度及轉向角進行探測,從而為控制參數模塊提供決策信息。
(2)控制參數模塊
控制參數模塊依據環境感知模塊采集的信息,進行壓路機行駛危險性的辨別,根據設定的安全距離模型,判斷當前壓路機是否處于危險狀態,并根據移動障礙物靠近壓路機范圍的不同,將不同程度的報警信號及執行信號傳送至控制執行模塊。
(3)控制執行模塊
在壓路機行駛的過程中,如果遇到移動障礙物,系統通過聲光報警模塊進行聲音及閃光報警提示,提示附近人員注意安全,或者將牲畜驅離壓路機;當檢測到移動障礙物靠近壓路機時,系統則通過控制執行模塊,采取減速、制動等措施。
3.2 障礙物避讓控制決策
壓路機在獲取環境信息后,如果在行駛路徑上判定存在移動障礙物,則將觸發停車等待,不應進行障礙物規避,這是為保證壓實效果而必須按規劃路徑行駛,如進行避障將無法保證碾壓效果。壓路機必須等移動障礙物離開后,方可繼續前進。因此,合理制定安全控制策略,可以提高壓路機的施工效率、安全性及可靠性。該文根據移動障礙物與壓路機的相對速度、位置、方位,制定了相應的避讓控制策略。
(1)壓路機施工區域風險等級劃分
壓路機施工區域風險等級劃分是避讓控制策略的核心,由于壓路機運行環境較為單一,可將壓路機的中心點作為施工安全區域劃分的參考點。將距離壓路機任意一點小于2 m的區域風險等級設定為Ⅰ級,將處在碾壓路徑上、距離壓路機任意一點在2~10 m之間的區域風險等級設定為Ⅱ級,將碾壓路徑區域以外、距離壓路機任意一點在2~10 m之間的區域風險等級設定為Ⅲ級,將距離壓路機任意一點大于10 m的區域風險等級設定為Ⅳ級。
(2)移動障礙物避讓控制策略
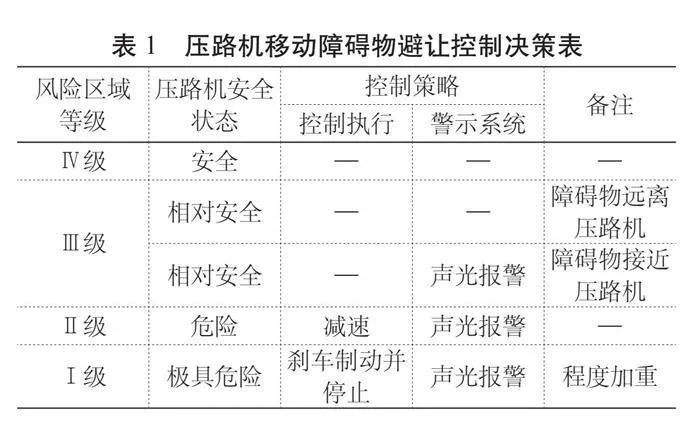
移動障礙物避讓控制策略如表1所示。
當移動障礙物進入Ⅳ級風險區域時,壓路機處于安全狀態,控制執行模塊不采取任何報警措施。
當移動障礙物進入Ⅲ級風險區域時,壓路機處于相對安全狀態。如果環境感知模塊判定移動障礙物遠離壓路機,則控制執行模塊不采取報警措施;如果環境感知模塊判定移動障礙物正在接近壓路機,則控制執行模塊啟動警示系統,進行聲光報警。
當移動障礙物進入Ⅱ級風險區域時,壓路機處于危險狀態,控制執行模塊立即啟動執行機構,壓路機開始減速,同時警示系統啟動聲光報警。
當移動障礙物進入Ⅰ級風險區域時,壓路機處于極具危險狀態,控制執行模塊立即啟動執行機構,壓路機剎車制動并停止,同時警示系統啟動聲光報警且報警程度加重。
4 結論
該文主要研究了壓路機無人駕駛控制系統,形成了無人駕駛控制系統框架,開發了適用于無人駕駛壓路機的路徑規劃與導航補償系統,針對施工安全研發了壓路機環境感知與主動防撞系統,得到如下結論:
(1)根據路基施工段落平面特征,提出了無人駕駛壓路機碾壓作業的路徑規劃要求,基于壓路機的往復碾壓、變道、疊輪等施工特點,形成了全覆蓋的路徑規劃方法。
(2)針對壓路機車身傾斜、振動導致的作業精度誤差,利用GNSS導航系統、角度編碼器、傾角傳感器設計了路徑導航補償系統,提高了壓路機的作業精度。
(3)針對壓路機無人駕駛安全問題,將施工區域劃分為四個風險等級,并開發了壓路機環境感知與主動防撞系統,實現對移動障礙物的智能識別,并根據障礙物所處風險區域的不同等級,制定了相應的避讓控制策略。
參考文獻
[1]田晉躍.國外軍用土方機械無人自動控制技術綜述[J].工程機械,2020(11):59-66+9.
[2]楊繼紅,吳現衛,王生波.遠距離智能遙控推土機的研究[J].建筑機械化,2018(1):19-21.
[3]白樺,陸念力.液壓挖掘機工作裝置運動軌跡的智能控制及示教再現[J].哈爾濱建筑大學學報,2000(4):70-73.
[4]王彤,李強明.無人駕駛壓路機主動防撞系統研究[J].智能城市,2021(24):155-156.
[5]徐工.徐工無人駕駛壓路機與平地機3D找平技術成功應用[J].工程機械文摘,2019(4):16.