基于ROS平臺(tái)的遠(yuǎn)程機(jī)器人交互系統(tǒng)設(shè)計(jì)研究
2024-08-09 00:00:00高原牛建凱
中國(guó)信息化 2024年7期
一、引言
隨著工業(yè)自動(dòng)化和智能化水平的不斷提升,遠(yuǎn)程機(jī)器人交互系統(tǒng)在危險(xiǎn)環(huán)境作業(yè)、精細(xì)操作及遠(yuǎn)距離任務(wù)執(zhí)行中發(fā)揮著日益重要的作用。面對(duì)這一趨勢(shì),本研究致力于開發(fā)一套基于ROS平臺(tái)的遠(yuǎn)程機(jī)器人交互系統(tǒng)。研究的主要目的是構(gòu)建一個(gè)可靠、高效、用戶友好的交互界面,實(shí)現(xiàn)對(duì)機(jī)器人行為的精確控制,并通過仿真驗(yàn)證系統(tǒng)設(shè)計(jì)的有效性,以支撐未來更廣泛的應(yīng)用場(chǎng)景。
二、基于ROS平臺(tái)的遠(yuǎn)程機(jī)器人交互系統(tǒng)總體方案設(shè)計(jì)
(一)交互系統(tǒng)平臺(tái)搭建
在構(gòu)建基于ROS平臺(tái)的遠(yuǎn)程機(jī)器人交互系統(tǒng)時(shí),需綜合考慮機(jī)器人平臺(tái)、硬件平臺(tái)與軟件平臺(tái)的協(xié)同工作。機(jī)器人平臺(tái)方面,系統(tǒng)以模塊化構(gòu)建為基礎(chǔ),實(shí)現(xiàn)不同功能模塊間的高效通信與協(xié)作。機(jī)器人控制PC(RobotCtl PC)配置了Xenomai+Ubuntu18.04系統(tǒng),提供實(shí)時(shí)性能支持,確保控制指令的即時(shí)傳遞與執(zhí)行。此外,機(jī)械臂的控制通過USB接口與人機(jī)交互控制PC(HRICtl PC)相連,后者也采用Ubuntu18.04操作系統(tǒng),保證了視覺控制與人機(jī)交互的無縫對(duì)接。在硬件平臺(tái)搭建中,圖示展現(xiàn)了各硬件組件間的網(wǎng)絡(luò)連接,確保數(shù)據(jù)在VisionCtl PC與HRICtl PC間的穩(wěn)定傳輸。這兩臺(tái)PC均運(yùn)行Ubuntu18.04,兼容性與性能都得到了優(yōu)化。ROS Master作為中心節(jié)點(diǎn),管理所有的通信過程,包括機(jī)器人狀態(tài)信息的更新與指令的分發(fā),實(shí)現(xiàn)了系統(tǒng)的集中控制與數(shù)據(jù)的整合處理。
(二)系統(tǒng)總體架構(gòu)設(shè)計(jì)
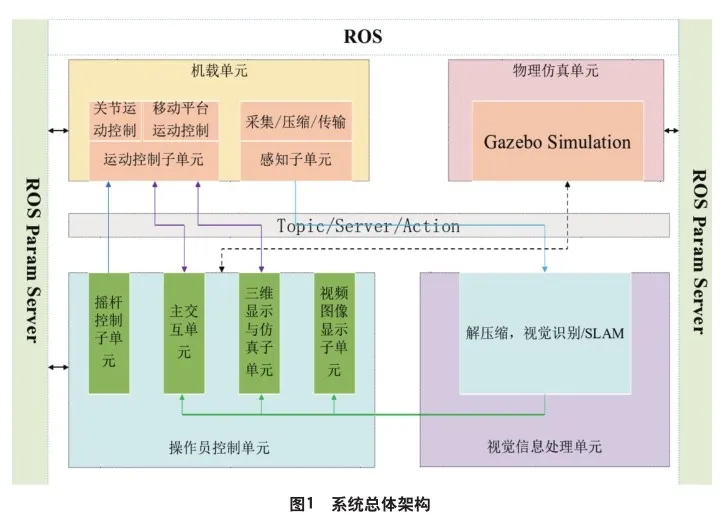
系統(tǒng)架構(gòu)采用地面端與場(chǎng)地端的雙元結(jié)構(gòu),其中視覺信息處理單元與操作員控制單元位于地面端,而機(jī)載單元?jiǎng)t部署于場(chǎng)地端。視覺信息處理單元關(guān)鍵在于處理從多源輸入接收的圖像數(shù)據(jù),并通過實(shí)時(shí)分析為操作員提供機(jī)器人及環(huán)境狀態(tài)的直觀反饋。這一單元涵蓋了圖像獲取、特征提取、圖像處理、以及對(duì)象識(shí)別等功能,并將處理結(jié)果通過ROS的通信機(jī)制,如Topic和Service,同步至ROS Param Server,供其他節(jié)點(diǎn)獲取與使用。操作員控制單元?jiǎng)t是整個(gè)系統(tǒng)與用戶交互的界面,其設(shè)計(jì)必須考慮直觀性與響應(yīng)性。通過集成指令輸入、狀態(tài)顯示、以及手動(dòng)/自動(dòng)控制切換等模塊,該單元讓操作員能夠以最小的努力實(shí)現(xiàn)對(duì)機(jī)器人的精確操控。
(三)輔助界面設(shè)計(jì)
輔助界面設(shè)計(jì)關(guān)鍵在于提升用戶交互的直觀性和操作的便捷性。根據(jù)資料描述,該系統(tǒng)界面采用了分區(qū)的設(shè)計(jì)策略,以增強(qiáng)功能模塊的明確性和訪問速度。上部區(qū)域集成了關(guān)鍵控制按鈕,如ROS主節(jié)點(diǎn)啟動(dòng)、機(jī)器人啟動(dòng)、急停以及啟動(dòng)里程計(jì)按鈕和更新TF選項(xiàng)框,確保了對(duì)機(jī)器人的全局控制與基礎(chǔ)設(shè)置功能的快速訪問。此設(shè)計(jì)允許操作者執(zhí)行系統(tǒng)和機(jī)器人的啟動(dòng)、緊急停止、里程計(jì)設(shè)置等核心操作,從而實(shí)現(xiàn)對(duì)機(jī)器人狀態(tài)的快速響應(yīng)和管理。主界面下部區(qū)域基于Qt的QLabel組件,設(shè)計(jì)了狀態(tài)顯示窗口,該窗口能夠?qū)崟r(shí)反映機(jī)器人的關(guān)節(jié)狀態(tài)、世界位姿等關(guān)鍵信息,為操作者提供了一個(gè)即時(shí)的系統(tǒng)反饋視圖。
(四)關(guān)節(jié)控制節(jié)點(diǎn)設(shè)計(jì)
三、系統(tǒng)仿真分析
在ROS平臺(tái)上,采用Gazebo仿真環(huán)境對(duì)所設(shè)計(jì)的系統(tǒng)進(jìn)行評(píng)估,通過模擬現(xiàn)實(shí)世界的操作條件和機(jī)器人的響應(yīng)來測(cè)試系統(tǒng)的性能。本次仿真過程以某遠(yuǎn)程機(jī)器人為例,結(jié)合本次交互系統(tǒng)設(shè)計(jì),在仿真中了包括對(duì)機(jī)器人模型的構(gòu)建、環(huán)境的設(shè)定、傳感器的模擬以及控制算法的實(shí)施。在仿真分析中,系統(tǒng)性能指標(biāo)如響應(yīng)時(shí)間、精確度和資源占用等被詳盡記錄。例如,控制節(jié)點(diǎn)響應(yīng)時(shí)間的測(cè)試結(jié)果如下表所示:

四、結(jié)束語
綜上所述,經(jīng)過深入的研究與系統(tǒng)的仿真測(cè)試,本文提出的遠(yuǎn)程機(jī)器人交互系統(tǒng)在設(shè)計(jì)和性能上均達(dá)到了預(yù)期目標(biāo)。系統(tǒng)總體方案設(shè)計(jì)明確了功能分布和操作流程,確保了用戶在復(fù)雜環(huán)境下能夠準(zhǔn)確、迅速地控制機(jī)器人。輔助界面的直觀設(shè)計(jì)極大地增強(qiáng)了用戶體驗(yàn),簡(jiǎn)化了操作復(fù)雜性。關(guān)節(jié)控制節(jié)點(diǎn)的精細(xì)化設(shè)計(jì)及其在仿真中的表現(xiàn)證實(shí)了系統(tǒng)在執(zhí)行精確控制方面的高效性。系統(tǒng)仿真分析的具體數(shù)據(jù)支撐了系統(tǒng)設(shè)計(jì)的有效性,確保了理論與實(shí)踐的緊密結(jié)合。最終,該研究有望在未來的工業(yè)、探索和救援等領(lǐng)域發(fā)揮重要作用。
作者單位:中國(guó)電子科技南湖研究院
