丘陵山地翻耕機具姿態調整系統設計與仿真
2024-07-04 21:17:19施正發袁奎余佳斌胡勇賀乘龍張富貴艾永峰
湖北農業科學
2024年6期
施正發 袁奎 余佳斌 胡勇 賀乘龍 張富貴 艾永峰
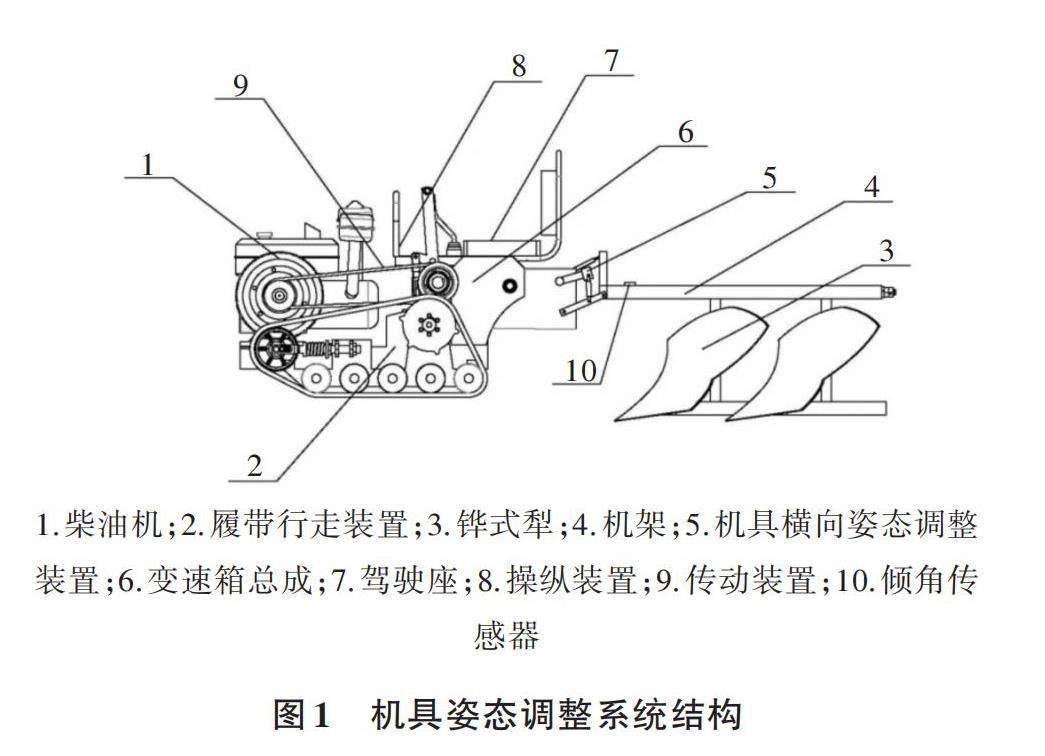

摘要:針對現有丘陵山地翻耕作業機具姿態調整系統在復雜作業工況下調整和控制精度不高,導致機具作業穩定性和作業安全性較差的問題,基于機具橫向姿態調整系統,利用模糊PID控制算法設計出一套適用于丘陵山地翻耕作業的機具姿態調整系統。以常規PID控制算法為對照,在姿態調整系統動力學建模的基礎上,通過MATLAB對其進行仿真分析,結果表明,常規PID控制算法的機具橫向姿態調整時間為4.5 s,橫向姿態角的超調量為0.89°;模糊PID控制算法的機具橫向姿態調整時間為1.9 s,橫向姿態角基本無超調。仿真試驗結果驗證了該機具姿態調整系統的可行性、正確性和科學性,調整系統精度和穩定性能滿足丘陵山地橫坡作業復雜的工況要求。
關鍵詞:丘陵山地;翻耕機具;姿態調整系統;模糊PID控制算法;仿真分析
中圖分類號:S232? ? ? ? ?文獻標識碼:A
文章編號:0439-8114(2024)06-0207-06
DOI:10.14088/j.cnki.issn0439-8114.2024.06.034 開放科學(資源服務)標識碼(OSID):
Design and simulation of attitude adjustment system for tillage equipment in hilly and mountainous areas
SHI Zheng-fa1,YUAN Kui2,YU Jia-bin1,HU Yong1,HE Cheng-long1,ZHANG Fu-gui2,AI Yong-feng3
(1. Guiyang Branch of Guizhou Tobacco Corporation, Guiyang? 550004, China;2. College of Mechanical Engineering, Guizhou University, Guiyang? 550025, China;3. Tongren Branch of Guizhou Tobacco Corporation, Tongren? 554300, Guizhou, China)
Abstract: In response to the problem of low adjustment and control accuracy of the existing attitude adjustment system for tillage equipment in hilly and mountainous areas under complex operating conditions, which led to poor stability and safety of the equipment operation,based on the lateral attitude adjustment system of the equipment, a set of attitude adjustment system suitable for hilly and mountainous tillage operations was designed using the fuzzy PID control algorithm. Compared with the conventional PID control algorithm, based on the dynamic modeling of the attitude adjustment system, simulation analysis was conducted using MATLAB. The results showed that the lateral attitude adjustment time of the conventional PID control algorithm was 4.5 seconds, and the overshoot of the lateral attitude angle was 0.89°;the lateral attitude adjustment time of the implement using the fuzzy PID control algorithm was 1.9 seconds, and there was basically no overshoot of the lateral attitude angle. The simulation test results had verified the feasibility, correctness, and scientificity of the attitude adjustment system of the equipment. The accuracy and stability performance of the adjustment system met the requirements of complex working conditions in hilly and mountainous cross slope operations.
Key words: hilly and mountainous areas; tillage equipment; attitude adjustment system; fuzzy PID control algorithm; simulation analysis
在農業生產中,丘陵山地多為6°~15°的復雜坡地,其面積在中國國土面積中占比接近70%[1]。丘陵山地坡度特征明顯,地形地貌較復雜,且其耕地地表高低起伏,在一定程度上導致動力平臺車身的傾斜,行駛和作業穩定性較差[2,3]。尤其是牽引作業時,所懸掛機具的姿態和位置會伴隨動力平臺行駛路徑的變化而不斷改變,導致機具不能和動力平臺車身始終保持水平掛接狀態,影響丘陵山地翻耕環節的作業效果和作業質量[4-6]。為實現機具在丘陵山地的仿形作業,動力平臺需具備車身和機具橫向姿態實時調整功能[7,8]。……
登錄APP查看全文
