路側侵擾影響下的機動車速度特性分析及預測
2024-05-23 08:33:53謝濟銘錢正富夏玉蘭趙鵬燕秦雅琴
重慶大學學報 2024年3期
謝濟銘 錢正富 夏玉蘭 趙鵬燕 秦雅琴
收稿日期:2022-03-30
網絡出版日期:2022-11-15
基金項目:國家自然科學基金資助項目(71861016)。
作者簡介:謝濟銘(1994—),男,博士研究生,主要從事交通狀態識別與演變研究,(E-mail) xiejiming@kust.edu.cn。
通信作者:秦雅琴,女,教授,博士生導師,(E-mail) qinyaqin@kust.edu.cn。
摘要:低等級道路路側侵擾現象頻繁,沖突嚴重,紊亂無序。準確預測其復雜交通行為特性,可揭示路側侵擾影響下的交通事故發生機制。為此采集低等級公路和城市道路5類常見的路側侵擾源視頻,提取高分辨率車輛微觀軌跡,獲取行經侵擾區的車輛速度,劃分侵擾區特征斷面,分析車速時空特性演變規律,采用線性、對數以及三次回歸建立車速預測模型。三次回歸模型在侵擾區復雜場景下表現出更好的車速預測性能。結果表明:低等級城市道路侵擾區的車速降幅普遍高于公路,駕駛人在侵擾源及附近減速效應顯著,當駕駛人與侵擾主體的意圖協調后,駕駛人會加速通過前方侵擾區,但當侵擾主體的行為意圖難以預測時,車速會出現一定波動。
關鍵詞:交通工程;車輛速度;交通特性;低等級道路;路側侵擾
中圖分類號:U495 ?????????文獻標志碼:A ??????????文章編號:1000-582X(2024)03-053-13
低等級道路是中國的國省干線路網的重要組成部分,截至2021年,中國的三級、四級公路仍占公路總里程80%以上[1]。尤其是偏遠地區地形復雜,道路條件有限,低等級道路在建設前期,周邊用地性質未深入考慮規劃。隨著城鎮化進程的發展,一些低等級道路路側形成了商業聚集區,非機動車隨意穿行、行人過街、路側停車等侵擾現象屢見不鮮[2],使路側侵擾逐漸變得復雜化[3-4]。路側侵擾的偶發性、侵入性與隨機性對道路系統運行造成了嚴重影響,導致機非混行、人車混行的紊亂交通流狀態。交通安全問題日益凸顯,亟待探究路側侵擾影響下的車輛運行速度變化規律,挖掘侵擾影響機理,掌握路側侵擾區交通紊亂、事故常發的交通運行規律。
在不同侵擾源對交通的影響研究方面,學者們把常見的侵擾源進行分類,分析了常見的侵擾源對正常運行的機動車的侵擾程度[5]。有的研究中依據運動狀態將侵擾源劃分為靜態侵擾[6]與動態侵擾[7],有的從交通參與者角度出發,將不同侵擾源劃分為路側停車[8-10]、行人[11]、非機動車[12-13]和支路出車[14]侵擾。不同侵擾源對車輛運行速度、道路通行能力、交通事故率等方面的影響程度不一。其中,車輛運行速度因其具有描述車輛運行的動態變化規律、反映駕駛人的行為模式等特性,成為研究的重點。例如,徐進等[15]將車輛運行速度細化為特征百分位速度進行研究,更好地體現了車輛在不同位置的運行規律。秦麗輝等[16]分析了路側自行車侵擾下的侵擾數量對鄰近機動車道平均行程車速的影響,采用回歸分析方法構建了速度預測模型。
總體而言,國內外學者從多角度多層次進行了分析,不僅有關注路側侵擾源對機動車運行速度[17-19]的影響,還有研究關注對道路通行能力[20]、交通安全[21]、跟馳行為[22]的影響,為中國的低等級道路交通安全問題的深入研究作出了重要的貢獻。以往研究受限于數據采集方式,存在侵擾樣本量小、采集頻率低、時變特征不明晰等特點;研究多聚焦于村鎮公路、農村道路等侵擾場景,較少涉及低等級道路交通構成、交通量、駕駛行為的顯著區別。
為此,筆者考慮低等級道路路側侵擾源復雜、交通行為紊亂的交通特性,選取典型低等級公路與低等級城市道路,采用無人機高空視頻車輛軌跡高分辨率信息提取技術,采集了常見的5類侵擾場景(非機動車、路側行人、路側停車、行人過街和支路出車)的全樣本數據,精細地捕捉和再現了侵擾區車速分布規律,明確了5類侵擾場景區段的運行特性和駕駛行為特征,為揭示低等級道路路側侵擾區的事故發生機制提供了理論依據。基于全樣本自然駕駛實驗數據,建立低等級道路路側侵擾區的運行特性預測模型,優化和完善了低等級道路運行車速預測模型體系,能為低等級道路安全評價及路側侵擾區交通組織管理提供參考。
1數據采集與處理
1.1實驗路段
研究場景為低等級道路,旨在探索路側侵擾影響下,行經侵擾區車輛的車速變化規律[23]。具體實驗流程如下:
1)選取道路斷面形式為一塊板的低等級道路,對選定的路段進行實地考察,實驗人員在周邊高地瞭望觀測,確保存在侵入、占用機動車路權的現象[24]。
2)遴選路側侵擾較多的路段,同時為避免數據采集影響交通運行,實驗人員在周邊高地,使用無人機等裝置獲取路側侵擾段及其上下游的高空視頻數據[24]。
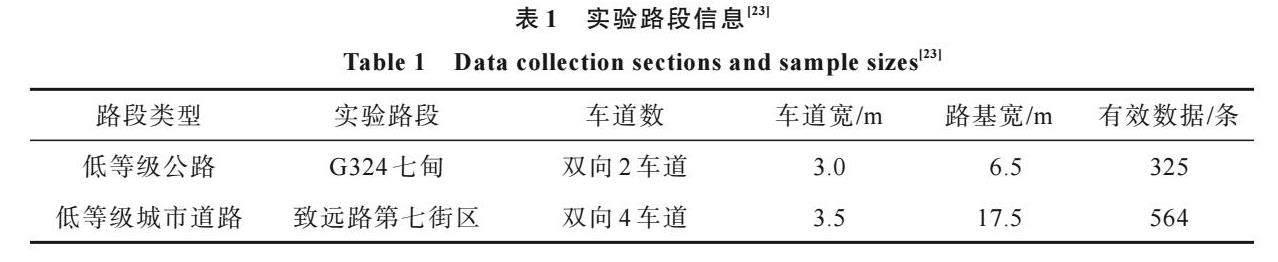
為了更好地研究路側侵擾段的車輛運行特性,掌握路側不同侵擾源的侵擾強度,實驗人員在低等級公路和低等級城市道路上進行了2類場景觀測實驗。其中,低等級公路選取昆明市呈貢區七甸鄉附近的G324段,道路設計車速為40 km/h;低等級城市道路選取昆明市呈貢區致遠路第七街區附近的路段,道路設計車速為60 km/h。數據采集路段的主要信息如表1和圖1所示,文中數據來源于G324七甸、致遠路第七街區[23]。
1.2數據采集
本研究的目的是探究行經低等級道路的機動車在各侵擾源影響下的速度變化規律。為保證道路上的車輛處于自由流狀態,排除道路擁堵對試驗結果的影響,在天氣晴朗、亮度和光強較為合適的低峰時間段內進行實驗。
數據采集主要設備為大疆御MAVIC AIR2專業航拍無人機。為了更好地分析路側侵擾源影響區段內交通參與者的行為,在無人機的限飛高度內,盡可能地采集足夠長的觀測區間段的交通運行狀況,選取侵擾源及鄰近200 m范圍作為本研究的觀測區。拍攝完成后使用多尺度KCF(Kernel correlation filter)優化算法提取獲得本研究所需數據[25]。
1.3樣本量與算法精度
為真實反映路側侵擾情況下車輛實際運行狀況,需保證實測數據的樣本量。根據統計學原理可知,最小樣本量應滿足式(1)的要求[15]:
式中:n為最小樣本量;δ為估計樣本車速標準差,一般取8 km/h;K為置信度水平系數,置信水平系數為95%時,K=1.96;E為車速觀測允許誤差,一般取E=2 km/h。
經測算,實例研究最小樣本量應為61輛。在高空視頻數據中,以5 min為統計時間間隔,低等級公路每斷面平均觀測樣本量為325輛;低等級城市道路每斷面平均觀測樣本量為564輛,采集數據符合最小樣本量標準。
2路側侵擾區車輛行為特性
2.1車速描述統計
駕駛人在實際車輛駕駛過程中,車速可能隨交通環境輕微波動。在侵擾源運動傾向不確定的復雜道路環境中,駕駛人難以預判侵擾源的運動軌跡,會產生頻繁加、減速行為。如表2所示,為研究不同侵擾源對車輛運行速度的影響,對各侵擾源影響下的車速進行統計,結果表明:
1)車輛行經侵擾區的平均車速遠小于限速值,其中,路側行人侵擾下的公路車速平均值最小,僅為11.30?km/h;支路出車侵擾下的城市道路車速平均值最大,為24.14 km/h;
2)對比各侵擾源下的最大、最小速度差,最大差值出現在為非機動車侵擾下的城市低等級路段,差值為52.74 km/h,最小差值出現在路側行人侵擾下的低等級公路上,差值為27.81 km/h;
3)各侵擾源影響下的車速偏度都大于0,說明車速左端存在較多極值,數據均值左側離散程度較高,車速峰度大于0,呈低峰態分布。
整體而言,5種侵擾源類別均會迫使機動車停車讓行,非機動車、行人過街最小速度均為0,侵擾影響尤為顯著,說明路側侵擾極大地影響了道路交通流的正常運行。
為了更直觀地分析各侵擾影響下的車速分布,繪制路側侵擾影響路段上的機動車速度頻率分布曲線如圖2所示。可以看出:
1)對比2類路段上的侵擾源影響程度發現,路側行人在公路上造成的影響明顯大于城市道路,反映出駕駛人在城市道路的期望速度高于公路,而行人過街侵擾在2類研究路段車速分布較為一致,說明駕駛人無論是在何種路段行駛,均會優先考慮減速避讓過街行人,側面反映了中國“禮讓行人”的政策法規已初見成效。
2)支路出車侵擾車速眾數較高,支路出車影響下的低等級公路車速分布區間為[20,25] km/h、城市道路車速分布區間為[20,35] km/h,說明支路出車使得2類路段下的駕駛人更具危機感,為保證駕駛安全,減速避讓幅度均較大,體現出一定的趨同性。
3)存在路側侵擾時,低等級公路車速分布更為集中,而低等級城市道路車速分布較為離散,說明低等級公路交通流運行更穩定,受到路側侵擾后可較快恢復正常行駛狀態,道路安全韌性更強。
2.2車速時空演變
根據各侵擾源影響下車輛行駛時間、距離及速度,紋理映射刻畫瞬時車速的時空分布,重建上述5類侵擾源在城市道路和公路低等級路段的車速時空演變規律,如圖3所示。為便于描述車輛行經侵擾源的動態連續過程,設駛入侵擾源的距離為負值、駛離距離為正值。
1)整體而言,在緊鄰侵擾源[-20,50] m的距離范圍內,車速呈現先減后加的變化趨勢。
2)對比5類侵擾源車速時空分布圖發現,低等級公路主要侵擾源為非機動車及路側停車,而城市道路主要侵擾源為路側行人及行人過街,有時迫使車輛停車讓行,致使車速降幅達30 km/h。
3)對比2類研究路段車速時空分布圖發現,低等級公路車速波動更劇烈,體現為時空分布圖曲面波動更大,而低等級城市道路車速分布更平穩。
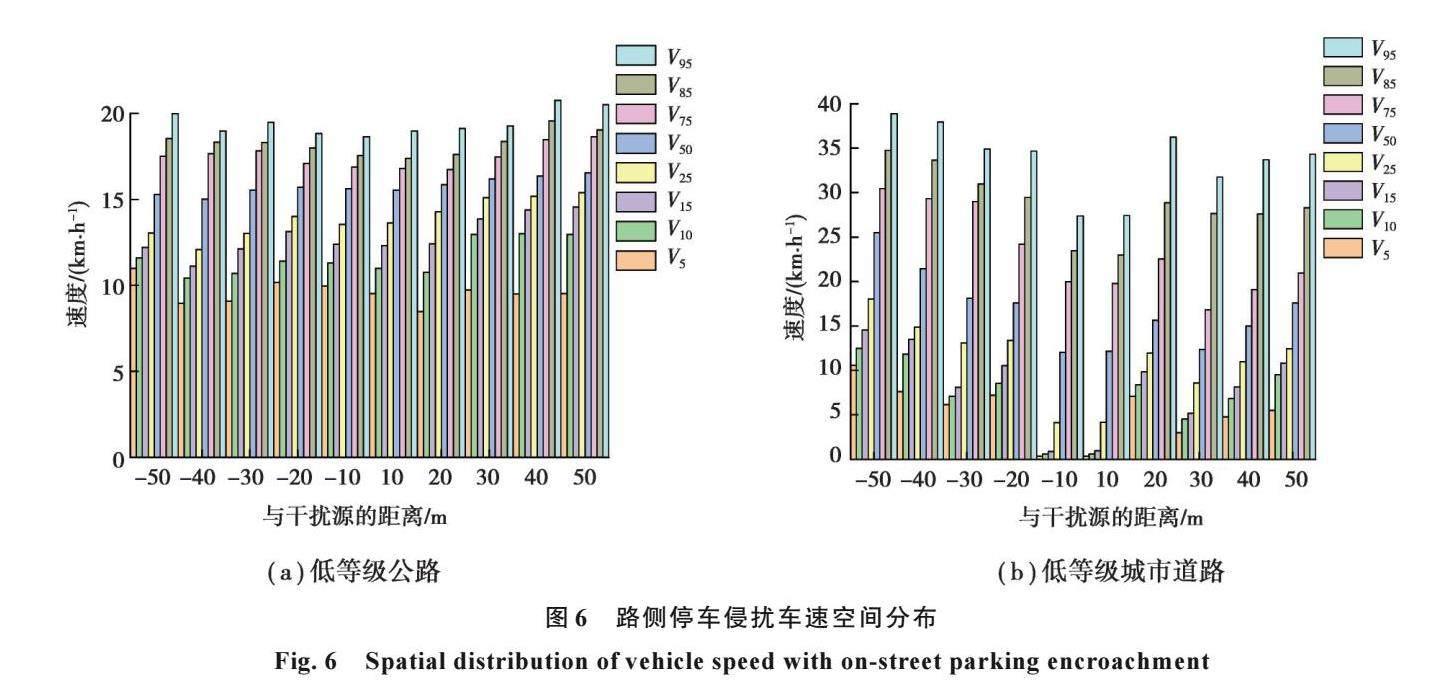
2.3侵擾單元車速空間分布
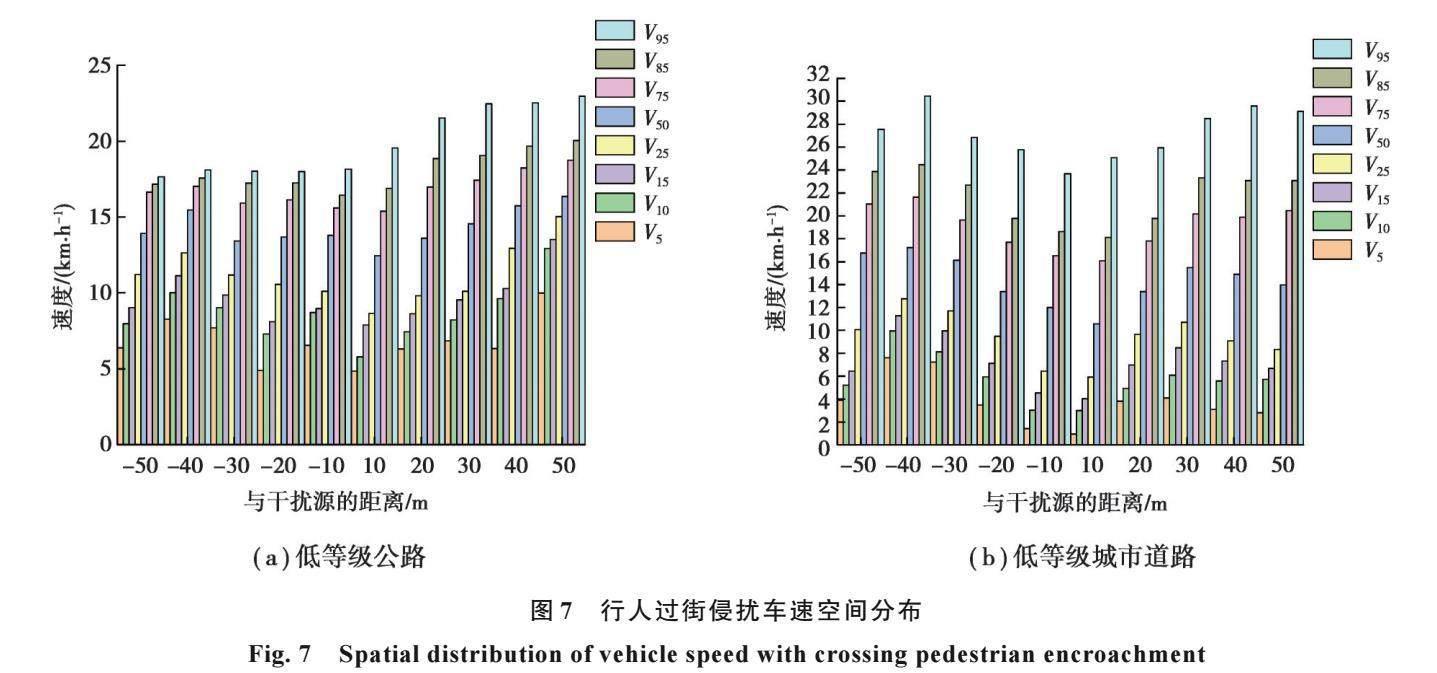
為了更加細致地描述車輛“駛入→行經→駛離”侵擾源的車速空間分布特征,以10 m為單元將侵擾源前后50 m空間距離進行細分。提取每個觀測單元5分位、10分位、15分位、25分位、50分位、75分位、85分位和95分位特征速度值(V5、V10、V15、V25、V50、V75、V85和V95),連接相鄰觀測單位同一百分位速度,得到5類侵擾源在2類低等級路段的車速空間分布如圖4~8所示。
非機動車侵擾影響如圖4所示。受到交通量等影響,城市道路上的車輛行為可能被緊鄰車輛制約,速度變化相對較大。
路側行人侵擾影響如圖5所示,呈現出減速區間更長且車速變化幅度更大的特征,說明行人雖為弱勢交通參與者,但其行為更靈活,時常出現橫穿道路或往復折返等行為,駕駛人傾向于以更加謹慎的行為方式通過侵擾源,即使駛離侵擾源,依舊保持低速平穩行駛。
路側停車侵擾影響如圖6所示,車速在低等級公路上較為平穩,而在低等級城市道路上波動較大,與圖4非機動車侵擾影響總體趨勢一致。說明路側停車侵擾更多受到交通量、跟車間距等影響,導致車速趨勢存在局部性波動,加之路側停車現象在低等級公路上較為普遍,因此對車速干擾較小。
行人過街侵擾影響如圖7所示,車速變化趨勢在2類路段上較為一致,總體變化趨勢為先下降后上升,這一規律在城市道路中更明顯,說明車輛未觀測到侵擾源前傾向于平穩通過,遇到侵擾源后減速慢行通過,駛離侵擾源10 m后逐漸加速,直至提速至正常車速。
支路出車侵擾源影響如圖8所示,與低等級公路相比,城市道路車速幅值變化更顯著。這是由于城市商業區支路出車位置比較固定,停車場警示標志設置更規范,駕駛人可較好地預判支路車輛運動傾向,有效減速后通過干擾源。受視距視野、路面摩擦系數、交通流量、警示標牌等影響,低等級公路車輛行經全程更謹慎平穩,車速僅發生局部性波動。
2.4侵擾區車速分布特性分析
考慮到本研究中實例場景復雜、特征差異大、樣本不均衡、駕駛風格不一等因素可能導致部分車速值異常,采用特征百分位速度分析關鍵參數V85和V15,反映道路服務水平,廣泛運用于公路設計與評價領域。從圖9可以看出:
1)低等級城市道路(限速60 km/h)的V85和V15略大于低等級公路(限速40 km/h),即便考慮2類研究對象間的限速值差異,歸一化處理后此結論依然成立,說明駕駛人在城市駕駛環境中安全意識更高,受到侵擾影響后反應更劇烈,速度離散較高。
2)低等級公路與城市道路的V85、V15分別集中分布于[5,30] km/h、[25,80] km/h,說明部分車輛存在超速行為,這是由于車輛行經干擾源前超速行駛,駛近干擾源過程中速度降低,由于車速抓拍等手段不完善,部分駕駛員限速遵從度低,側面說明了路側侵擾影響下安全保障的另一重要措施是加強執法強度。
3)支路出車為車速降幅最大侵擾源,車輛通過支路出車侵擾源后均有明顯的加速行為,其中,城市道路加速行為更突出,表現為加速行為更早、幅值更高、車速離散度更大的特性。
總體而言,低等級城市道路車速離散性大于公路,受到侵擾源影響后,產生更劇烈的縱向干涉作用,更易發生追尾事故。可考慮將車速協調性納入路側侵擾影響下的道路運行評價體系中,對建成運營后存在侵擾源的道路加大執法力度,保障交通參與者的生命財產安全。
3侵擾區車速預測模型
如前述,為保證安全行駛,車輛在駛近侵擾源的過程中通常會減速避讓,易造成交通紊亂并引發事故。通過深入挖掘侵擾區車速運行規律,構建更精準的車速預測模型,進而正確合理地推斷未來的交通狀況,對減緩交通擁堵、降低交通事故率有重要的現實意義和應用前景。基于此,考慮了車速隨車輛與侵擾源的距離以及車速的離散性,對傳統的速度預測模型進行改進,參考線性[25]、對數[26]、三次回歸[27]經典車速預測模型,構建各侵擾源影響下車速與距侵擾源距離的車速預測模型。
3.1線性回歸
由侵擾區車速特性分析得知車速在駛近駛離侵擾源過程中呈先下降后上升的一致趨勢,符合已報道的研究結論[23]。因此,車輛駛近侵擾源過程應優先考慮車速折減與速差的離散性,建立基于速差離散值的回歸模型,即距侵擾源的“空間距離x”與“速差離散值Vdiff”的線性關系模型:
線性回歸模型(置信水平均小于0.1,置信度95%)參數結果如表3所示。表中R2為相關系數,表征模型的擬合優度;P為顯著性值,表示極端結果出現的概率;黑體表示的數值為擬合度較優的數據。低等級公路上的路側行人、行人過街、支路出車侵擾的模型擬合優度R2均大于0.9;低等級城市道路上的行人過街侵擾影響下的速度擬合優度為0.749,其余均低于0.5,說明經典多元線性回歸預測模型在車速預測方面不具有明顯優勢,難以達到理想預測精度。
3.2對數回歸
為提高車速預測模型預測精度,考慮侵擾源與車速變化趨勢,選用對數回歸方法,擬合距侵擾源的“空間距離x”與“速差離散值Vdiff”關系,模型表達式如下。
對數回歸分析(置信水平均小于0.1,置信度95%)結果如表4。低等級公路的路側行人、行人過街、支路出車侵擾擬合優度達0.9以上,城市道路行人過街侵擾擬合優度為0.730,與表3結果基本一致,說明對數回歸模型同樣無法預測復雜場景下車速運行特征。
3.3三次回歸
為了更好地預測路側侵擾特殊路段車速運行規律,針對上述模型存在的擬合優度較低、顯著性不高的問題,遴選可反映復雜非線性的三次回歸模型如下:
三次回歸分析(置信水平均小于0.1,置信度95%)結果如表5所示。可以看出擬合優度R2顯著提高,僅低等級公路非機動車、城市道路路側停車侵擾影響R2小于0.6,其他侵擾源影響擬合優度R2、顯著性P值均較優,說明三次回歸模型結構在車速預測方面具有明顯優勢,表現出更好的預測精度,可以較好地預測路側侵擾源距離對車速的影響。
3.4模型驗證
采用統計學中常用的3項評價指標,即平均相對誤差平均絕對誤差均方根誤差來驗證三次回歸模型的精度[26]。公式如下:
模型驗證結果如表6所示。可以看出2類研究路段車速預測結果均較好,說明模型性能較為穩定,魯棒性好。其中,低等級公路比城市道路速度預測結果更好,與前述車速行為特征一致。
4結束語
1)車輛臨近侵擾源過程中車速均存在一定浮動,非機動車、路側行人、路側停車、行人過街、支路出車侵擾下車速分布分別為7~15 km/h、5~10 km/h、10~20 km/h、10~30 km/h、15~30 km/h,支路出車對于車輛運行影響最大。
2)相同侵擾源影響下,低等級城市道路車速較離散,車輛間速差較大,縱向干涉程度較高,更易發生追尾事故,相關部門應制定交通管制措施,以降低潛在風險和化解交通沖突。
3)基于自然駕駛實驗數據,結合低等級道路交通運行特性,針對不同類別侵擾源影響下的車輛行為特性進行量化分析,并對路側干擾影響下的道路交通運行演化過程進行探索,建立了低等級路段的路側侵擾影響區車速預測模型,引入非線性三次回歸模型,揭示了不同侵擾源影響下的交通行為發生機制,改善了侵擾區復雜環境的車速預測精度,為低等級道路路側侵擾區車速管理提供理論依據。
4)實際交通場景中,低等級道路路側侵擾存在多種侵擾源組合影響。本研究中根據車流數據多為單一侵擾源影響的特征,按侵擾源類型對車速的影響分別進行了分析和預測。待后續獲取多種侵擾源組合影響的車流數據,還需進一步探索多種侵擾源組合影響下的車流狀態變化機制。
參考文獻
[1]??中華人民共和國交通運輸部. 2020年交通運輸行業發展統計公報[EB/OL]. (2021-05-19)[2022-03-15] http://www.gov.cn/xinwen/2021-05/19/content_5608523.htm.
Ministry of Transport of the Peoples Republic of China. Statistical bulletin on the development of the transport industry in 2020[EB/OL]. (2021-05-19)[2022-03-15] http://www.gov.cn/xinwen/2021-05/19/content_5608523.htm.(in Chinese)
[2]??任建洲. 小城鎮過境公路技術研究[D]. 西安: 長安大學, 2011.
Ren J Z. The study of small town through-highway technology[D]. Xian: Changan University, 2011. (in Chinese)
[3]??楊金順, 孫洪運, 李林波, 等. 道路交通系統恢復力研究進展綜述[J]. 交通信息與安全, 2014, 32(3): 87-93.
Yang J S, Sun H Y, Li L B, et al. Review of road transportation system resilience research[J]. Journal of Transport Information and Safety, 2014, 32(3): 87-93. (in Chinese)
[4]??余博, 陳雨人, 付云天. 基于駕駛人視覺感知的低等級公路行車速度預測[J]. 同濟大學學報(自然科學版), 2017, 45(3): 362-368.
Yu B, Chen Y R, Fu Y T. Driving speed prediction method for low-grade highways from drivers visual perception[J]. Journal of Tongji University (Natural Science), 2017, 45(3): 362-368. (in Chinese)
[5]??樊兆董, 李美玲, 冉晉, 等. 基于橫向干擾度和交通事故數的車速預測模型構建[J]. 公路與汽運, 2021(2): 34-36, 42.
Fan Z D, Li M L, Ran J, et al. Construction of vehicle speed prediction model based on lateral disturbance degree and number of traffic accidents[J]. Highways & Automotive Applications, 2021(2): 34-36, 42. (in Chinese)
[6]??Dong C J, Nambisan S S, Richards S H, et al. Assessment of the effects of highway geometric design features on the frequency of truck involved crashes using bivariate regression[J]. Transportation Research Part A: Policy and Practice, 2015, 75: 30-41.
[7]??曲大義, 陳文嬌, 郭濤, 等. 考慮橫向干擾的交叉跟馳模型研究[J]. 公路交通科技, 2015, 32(1): 122-127.
Qu D Y, Chen W J, Guo T, et al. Research on staggered car-following model considering lateral disturbance[J]. Journal of Highway and Transportation Research and Development, 2015, 32(1): 122-127. (in Chinese)
[8]??陳瑞, 張志清, 趙廷杰, 等. 基于駕駛員心率增長率的穿村鎮公路平面線形安全評價[J]. 交通信息與安全, 2011, 29(3): 74-78.
Chen R, Zhang Z Q, Zhao T J, et al. Safety evaluation on horizontal alignment of through-village highway based on drivers growth rate of HR[J]. Journal of Transport Information and Safety, 2011, 29(3): 74-78. (in Chinese)
[9]??Biswas S, Chandra S, Ghosh I. Effects of on-street parking in urban context: a critical review[J]. Transportation in Developing Economies, 2017, 3(1): 1-14.
[10]???elik A K, Oktay E. A multinomial logit analysis of risk factors influencing road traffic injury severities in the Erzurum and Kars Provinces of Turkey[J]. Accident Analysis & Prevention, 2014, 72: 66-77.
[11]??Chen Y H, Liu F H, Bai Q W, et al. Analysis of conflict factors between pedestrians and right-turning vehicles at signalized intersections[J]. Journal of Southeast University (English Edition), 2019, 35(1): 118-124.
[12]??Bai L, Liu P, Chan C Y, et al. Estimating level of service of mid-block bicycle lanes considering mixed traffic flow[J]. Transportation Research Part A: Policy and Practice, 2017, 101: 203-217.
[13]??Apasnore P, Ismail K, Kassim A. Bicycle-vehicle interactions at mid-sections of mixed traffic streets: examining passing distance and bicycle comfort perception[J]. Accident Analysis & Prevention, 2017, 106: 141-148.
[14]??趙磊, 張志清, 劉豪, 等. 穿村鎮公路橫向干擾關鍵因素識別[J]. 武漢理工大學學報(交通科學與工程版), 2019, 43(6): 1125-1129.
Zhao L, Zhang Z Q, Liu H, et al. Identification of key factors of horizontal interference of highway through towns and villages[J]. Journal of Wuhan University of Technology (Transportation Science & Engineering), 2019, 43(6): 1125-1129. (in Chinese)
[15]??徐進, 曾粵. 高速條件下隧道出入口行駛速度特性[J]. 交通運輸工程學報, 2021, 21(4): 197-209.
Xu J, Zeng Y. Characteristics of driving speed at tunnel entrance and exit at high speed[J]. Journal of Traffic and Transportation Engineering, 2021, 21(4): 197-209. (in Chinese)
[16]??秦麗輝, 裴玉龍, 白崇喜. 自行車干擾下的城市干路路段通行能力與服務水平[J]. 哈爾濱工業大學學報, 2018, 50(9): 61-67.
Qin L H, Pei Y L, Bai C X. Capacity and LOS of urban arterial road segment under the interference of bicycle[J]. Journal of Harbin Institute of Technology, 2018, 50(9): 61-67. (in Chinese)
[17]??Kalal Z, Mikolajczyk K, Matas J. Tracking-learning-detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(7): 1409-1422.
[18]??陳亦新, 王雪松. 山區高速公路組合線形路段車道偏移行為[J]. 中國公路學報, 2018, 31(4): 98-104.
Chen Y X, Wang X S. Effects of combined alignments of mountainous freeways on lane departure[J]. China Journal of Highway and Transport, 2018, 31(4): 98-104. (in Chinese)
[19]??Yadav A K, Velaga N R. Investigating the effects of driving environment and driver characteristics on drivers compliance with speed limits[J]. Traffic Injury Prevention, 2021, 22(3): 201-206.
[20]??Zheng C J, He R, Wan X, et al. The study on in-city capacity affected by pedestrian crossing[J]. Mathematical Problems in Engineering, 2016, 2016: 5271904.
[21]??Ahmed M, Huang H L, Abdel-Aty M, et al. Exploring a Bayesian hierarchical approach for developing safety performance functions for a mountainous freeway[J]. Accident Analysis & Prevention, 2011, 43(4): 1581-1589.
[22]??Fitzsimmons E J, Kvam V, Souleyrette R R, et al. Determining vehicle operating speed and lateral position along horizontal curves using linear mixed-effects models[J]. Traffic Injury Prevention, 2013, 14(3): 309-321.
[23]??趙鵬燕. 路側干擾影響下低等級道路交通安全風險韌性研究[D]. 昆明: 昆明理工大學, 2022.
Zhao P Y. Study on risk resilience of low grade road safety under roadside interference[D]. Kunming: Kunming University of Science and Technology, 2022. (in Chinese)
[24]??謝濟銘, 彭博, 秦雅琴. 基于換道概率分布的多車道交織區元胞自動機模型[J].交通運輸系統工程與信息, 2022, 22(3): 276-285.
Xie J M, Peng B, Qin Y Q. Cellular automata model of multi-lane weaving area based on lane-changing probability distribution[J]. Journal of Transportation Systems Engineering and Information Technology, 2022, 22(3): 276-285. (in Chinese)
[25]??祝站東, 榮建, 周偉. 路側干擾對運行速度的影響[J]. 北京工業大學學報, 2010, 36(11): 1524-1530.
Zhu Z D, Rong J, Zhou W. The impact of roadside interferences on operating speed[J]. Journal of Beijing University of Technology, 2010, 36(11): 1524-1530. (in Chinese)
[26]??袁華智, 閻瑩, 袁志兵, 等. 考慮多因素修正的山區二級公路彎坡組合路段小型車運行速度模型[J]. 中國公路學報, 2022, 35(1): 286-297.
Yuan H Z, Yan Y, Yuan Z B, et al. Operating speed model of small car on combined horizontal and vertical curves of mountain secondary roads considering multi-factor correction[J]. China Journal of Highway and Transport, 2022, 35(1): 286-297. (in Chinese)
[27]??楊金燕. 城市道路坡道及彎道上的車速預測模型研究[D]. 重慶: 重慶交通大學,2019.
Yang J Y. Research on vehicle speed prediction model on urban road ramp and curved road[D]. Chongqing: Chongqing Jiaotong University, 2019. (in Chinese)
(編輯??羅敏)