基于智能手機自設基站的相對定位分析
2024-04-23 07:26:06藍敏益高成發
大地測量與地球動力學 2024年5期
藍敏益 高成發
1 東南大學交通學院,南京市東南大學路2號,211189
基于智能手機終端的GNSS定位算法是當下導航定位領域的研究熱點之一。與測地型接收機不同,智能手機采用體積小的全向線性極化天線和低成本、低功耗的GNSS芯片,存在衛星信號噪聲較大、信號強度較低、多路徑效應嚴重、載波相位觀測不連續等問題[1-3]。針對這些問題,通過數據質量控制和GNSS定位算法優化,可在一定程度上改善定位精度和可靠性。在數據質量控制方面,甘露等[4]通過不確定度檢測、雙頻校核、單差檢核等方法有效剔除粗差,從而提高智能手機GNSS定位精度。在定位算法方面,部分學者側重于研究隨機模型優化[5-6]。崔均燁等[6]指出多路徑效應與信噪比具有較強的相關性,信噪比相關加權模型更適用于智能手機GNSS定位。同時,整周模糊度固定也是實現高精度定位的關鍵。已有研究表明[7-9],多個品牌多個型號的智能手機能夠實現整周模糊度固定,獲得cm級定位精度。Geng等[9]利用智能手機小米8外接貼片天線實現整周模糊度固定,RTK解算E、N、U方向定位精度可達1.10 cm、1.11 cm和3.36 cm。Dabove等[10]對智能手機小米8單基線RTK定位精度進行分析,并以智能手機作為基準站,智能手機間相對定位的平面、高程定位精度分別優于3 cm、2 cm。
目前在差分定位研究中,多采用測地型接收機作為基準站。然而,部分地區缺乏地面傳統基準站,給高精度定位工作帶來不便。利用智能手機搭建臨時基站,能夠保證區域內的高精度相對定位,為局部基線測量和坐標控制提供新的解決方案。本文以相對定位為基礎,探究基于智能手機的自設基站提供基準站服務的可行性,為后續以智能手機為主的低成本高精度定位服務提供參考。
1 相對定位模型
1.1 觀測模型
相對定位是指利用兩臺或兩臺以上的接收機進行同步觀測,坐標已知的接收機為基準站,坐標未知的接收機為流動站。通過差分計算獲得流動站與基準站的相對坐標,進而求得流動站的三維坐標。本文采用的相對定位模型為載波雙差定位模型。
假設基準站i和流動站j的原始載波觀測方程為:
(1)
(2)

基準站和流動站對同一衛星進行站間單差,可得:

(3)
式中,?為單差算子。
引入另一顆衛星q,在單差觀測值基礎上再次作差,可得:

(4)
式中,Δ?為雙差算子。
1.2 Kalman濾波模型
Kalman濾波算法是通過一系列線性系統狀態方程,利用系統觀測數據對系統狀態進行估計的一種最優估計算法,廣泛應用于導航、監測、控制等領域。本文采用的參數估計方法為Kalman濾波,其數學模型可表示為:
Xk=Φk/k-1Xk-1+Γk-1Wk-1
(5)
Zk=HkXk+V
(6)
式中,k表示觀測歷元,Xk表示狀態參數向量,Φk/k-1表示從k-1時刻到k時刻的狀態轉移矩陣,Wk-1表示動態噪聲矩陣,Z表示觀測向量,Hk表示觀測系數矩陣,V表示量測噪聲向量。
k-1歷元到k歷元卡爾曼濾波器更新過程分為狀態更新和量測更新,可表示為:
(7)
式中,Pk/k-1表示預測的方差協方差陣,Pk表示方差協方差陣,Qk-1表示系統噪聲矩陣,Rk表示量測噪聲方差陣,K表示增益系數。
在靜態實驗中,待估狀態量為智能手機位置、雙差模糊度,Xk可表示為:
Xk=[rr,Δ?N]
(8)
式中,rr表示三維位置向量。
在行人動態和騎車動態實驗中,待估狀態量為智能手機位置、速度、加速度、雙差模糊度,Xk可表示為:
鄉寧縣西坡鎮趙院新農村是采煤沉陷區治理中新建的集中移民搬遷點,原先散居在山溝峁梁幾個自然村幾百戶村民住進了整齊劃一的11棟4層樓房里,過上了和城里人一樣的生活。居住環境改善了,問題卻接踵而來。有人把農機具橫七豎八地放到單元樓下把別家小孩碰傷了,有的家里婚喪嫁娶鼓樂從早響到晚,有人在小區中的空地上種蔬菜,有的養著大型犬整天吠叫不止,甚至有咬傷人的事情發生……
Xk=[rr,vr,ar,Δ?N]
(9)
式中,vr表示三維速度向量,ar表示三維加速度向量。
靜態實驗利用Kalman濾波獲得雙差模糊度浮點解后,利用MLAMBDA算法求取模糊度固定解。行人動態和騎車實驗中智能手機GNSS觀測數據質量受到較大影響,難以實現整周模糊度固定,故利用浮點解參與計算。
2 實驗及分析
2.1 實驗設計
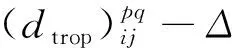
本文采用的實驗設備為智能手機華為P40和華為Mate40以及2臺測地型接收機中繪i90。智能手機華為P40作為自設基站,華為Mate40作為流動站,智能手機具體參數見表1。2款手機均無法獲取GLONASS G1載波觀測值。2臺測地型接收機中繪i90的作用是標定智能手機的參考真值。考慮到智能手機內嵌的GNSS芯片以及線性極化天線對智能手機觀測質量的影響,本文將智能手機華為P40和信號轉換器放置于RF屏蔽箱內,同時RF屏蔽箱外接測量級天線,構成自設基站,安裝如圖1所示。RF屏蔽箱內接收機(智能手機、測地型接收機)接收到的信號都來自外接天線,因此接收機在RF屏蔽箱內不同位置的定位結果相同,接收機位置差異不影響定位結果。自設基站無發射端,實驗均為事后解算。RF屏蔽箱箱體周圍吸波材料能有效減弱大部分GNSS多路徑效應和射頻反射影響,提升GNSS觀測數據質量。
圖1 自設基站安裝示意圖Fig.1 Installation diagram of self-installed base station

表1 智能手機參數
實驗具體設計為:首先安裝智能手機華為P40并完成自設基站坐標標定;然后利用智能手機華為Mate40分別開展靜態、行人動態和騎車動態實驗;最后利用智能手機華為Mate40分別同自設基站和基準CORS站進行差分定位。2種差分方法的定位結果分別與智能手機華為Mate40 的參考真值比較,驗證自設基站提供基準站服務的可行性。實驗地點為東南大學九龍湖校區,觀測條件良好,且周圍無高樓遮擋,環境開闊。本文采用 GPS L1/L5、BDS B1I、Galileo E1/E5 載波觀測值進行定位解算,數據采樣率為1 s,截止高度角為15°,載噪比閾值為 20 dB/Hz。
2.2 自設基站坐標標定
智能手機華為P40接收到外接天線數據后,同CORS基準站進行差分解算,作為自設基站的坐標。此外,采用測地型接收機在同一位置同CORS基準站進行差分解算,作為智能手機華為P40的參考真值,用于評估自設基站坐標精度。圖2為自設基站N、E、U方向定位誤差序列,可以看出,N、E方向誤差序列更接近于0,整體波動較小,U方向誤差序列在0.11 m上下波動。表2 為自設基站的定位誤差RMS,平面和高程定位精度分別為0.004 m和0.110 m。自設基站能否作為基準站為其他智能手機提供服務還需要進一步驗證。
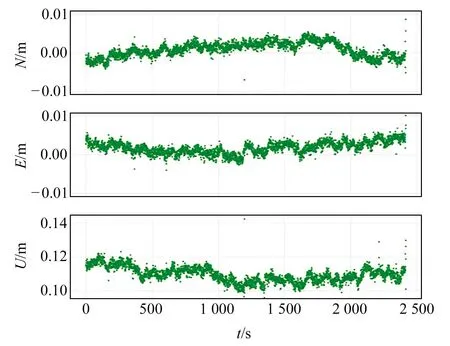
圖2 自設基站定位誤差序列Fig.2 Positioning error sequence of self-established base station

表2 自設基站定位誤差
2.3 智能手機與自設基站差分定位
為具體分析智能手機作為自設基站能否為其他智能手機提供基準站服務,開展靜態、行人動態、騎車動態3組定位實驗。
2.3.1 靜態實驗
在空曠場地上架設智能手機華為Mate40進行靜態觀測,同時采用測地型接收機中繪i90在同一位置進行靜態觀測,并同CORS基準站進行差分解算,作為智能手機華為Mate40的參考真值,用于評估智能手機華為Mate40同自設基站差分的精度。
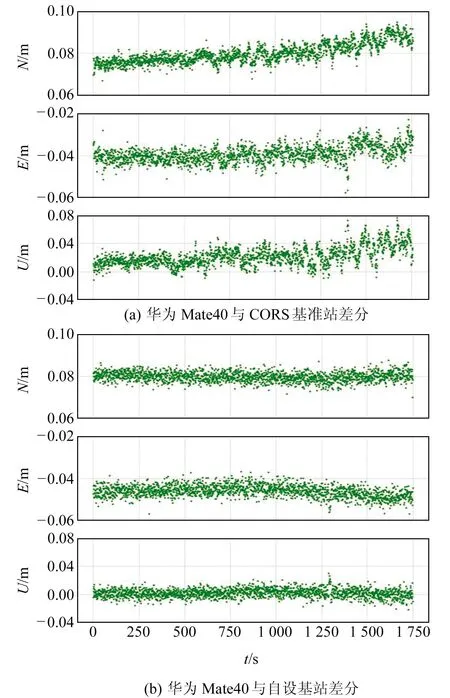
圖3 靜態實驗華為Mate40定位誤差序列Fig.3 Positioning error sequence of Huawei Mate40 in static experiment

表3 靜態實驗華為Mate40差分定位精度
2.3.2 動態實驗
行人動態實驗儀器安裝時,將2臺測地型接收機中繪i90等高放置于橫木兩端,智能手機華為Mate40置于接收機中間。行人手舉橫木開展行人動態實驗,橫木上有等分標記,用于計算智能手機參考真值。2臺測地型接收機中繪i90同CORS基準站進行差分定位,根據測地型接收機天線到智能手機天線中心的距離實現智能手機參考真值的標定。騎車動態實驗儀器安裝同行人動態實驗類似,將橫木放置于電動車后座。
圖4(a)為行人動態CORS基準站和智能手機華為Mate40差分解算的N、E、U方向定位誤差序列,可以看出,N、E、U方向誤差序列波動較為明顯,N、E方向誤差序列絕大多數優于1 m,U方向最大誤差不超過4 m,在收斂后絕大多數優于2 m。圖4(b)為行人動態自設基站和智能手機華為Mate40差分解算的N、E、U方向定位誤差序列。圖4(a)和4(b)誤差序列具有相似性,在240~400 s內E方向波動較為明顯。表4為行人動態實驗智能手機華為Mate40分別同自設基站和CORS基準站差分的定位誤差,可以看出,在N、E方向上,智能手機華為Mate40同CORS基準站的差分精度優于智能手機華為Mate40同自設基站的差分精度。智能手機華為Mate40同CORS基準站差分的平面和高程定位精度分別為0.511 m、1.099 m,智能手機華為Mate40 同自設基站差分的平面和高程定位精度分別為0.591 m、0.957 m。兩組行人動態實驗的定位結果在同一量級上,在N、E、U方向互差均不超過15 cm,說明自設基站能夠為智能手機華為Mate40提供穩定的基準站服務。
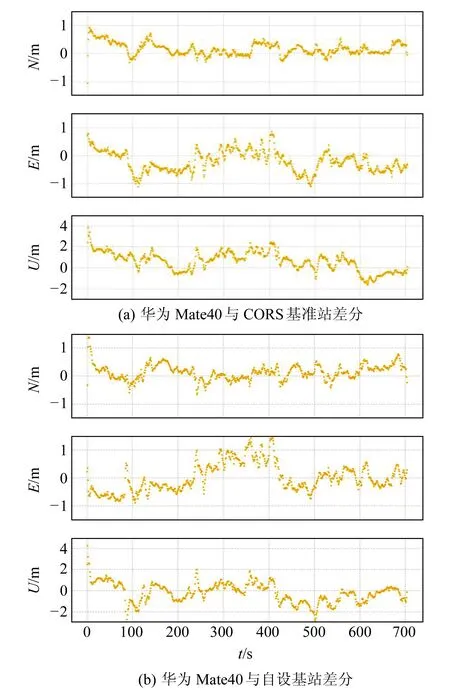
圖4 行人動態實驗華為Mate40定位誤差序列Fig.4 Positioning error sequence of Huawei Mate40 in pedestrian dynamic experiment

表4 行人動態實驗華為Mate40差分定位精度
圖5(a)為騎車動態實驗智能手機華為Mate40同CORS基準站差分解算的N、E、U方向定位誤差序列,可以看出,E、U方向誤差序列存在較為明顯的震蕩現象。圖5(b)為騎車動態實驗智能手機華為Mate40同自設基站差分解算的N、E、U方向定位誤差序列。表5為騎車動態實驗智能手機華為Mate40分別同自設基站和CORS基準站差分的定位誤差。智能手機華為Mate40同CORS基準站差分解算的平面和高程定位精度分別為0.467 m、0.629 m,均優于1 m,互差不超過20 cm。智能手機Mate40同自設基站差分解算的平面和高程精度分別為0.631 m、1.182 m。騎車動態實驗2組定位結果也均在同一量級上,再次表明自設基站能為智能手機提供穩定的基準站服務。
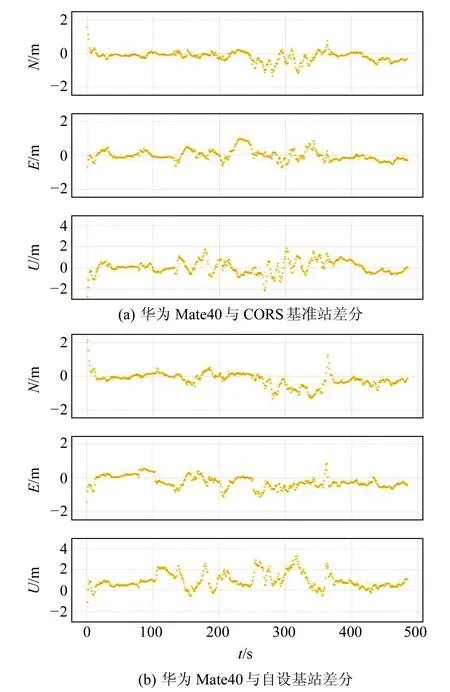
圖5 騎車動態實驗華為Mate40定位誤差序列Fig.5 Positioning error sequence of Huawei Mate40 in cycling dynamic experiment

表5 騎車動態實驗華為Mate40差分定位誤差
3 結 語
本文以智能手機華為P40為研究對象,分析將智能手機作為自設基站的智能手機間相對定位。以傳統CORS基準站作為對照組,對比分析靜態、行人動態、騎車動態3種模式下智能手機自設基站的相對定位性能,得到以下結論:
1)在靜態實驗中,CORS基準站同智能手機華為Mate40差分的平面和高程定位精度分別為0.089 m、0.025 m;自設基站同智能手機華為Mate40差分的平面和高程定位精度分別為0.092 m、0.006 m。智能手機華為Mate40 同CORS基準站和自設基站能夠獲得cm級定位精度,且兩者差異較小。
2)在行人動態實驗中,自設基站同智能手機華為Mate40差分的平面和高程定位精度分別為0.591 m、0.957 m;CORS基準站同智能手機華為Mate40差分的平面和高程定位精度分別為0.511 m、1.099 m。在騎車動態實驗中,自設基站同智能手機華為Mate40差分的平面和高程定位精度分別為0.631 m、1.182 m;CORS基準站同智能手機華為Mate40差分的平面和高程定位精度分別為0.467 m、0.629 m。智能手機華為Mate40同CORS基準站和自設基站的差分結果均能獲得dm級平面定位精度,表明基于智能手機的自設基站能同CORS基準站一樣提供基準站服務。
本文驗證了基于智能手機的自設基站實現智能手機間相對定位的可行性。通過智能手機間的靜態差分實驗說明該解決方案能夠完成區域基線測量。動態實驗表明,該方案在應對測量精度要求不高的測繪作業時具有巨大潛力和發展空間,為測繪工作的高效和低成本提供更多可能性。
猜你喜歡
紅領巾·萌芽(2022年9期)2022-11-24 05:55:58
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
英語文摘(2020年5期)2020-09-21 09:26:30
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
趣味(語文)(2018年8期)2018-11-15 08:53:00
海外星云(2016年7期)2016-12-01 04:18:00
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
樂活老年(2016年10期)2016-02-28 09:30:37