基于視線角速度精度的導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo)研究
2024-04-18 04:47:14徐航白曉東張喜濤
航空兵器 2024年1期
關(guān)鍵詞:評(píng)估指標(biāo)
徐航 白曉東 張喜濤


摘 要:????? 針對(duì)傳統(tǒng)抗干擾性能評(píng)估指標(biāo)集中在導(dǎo)彈制導(dǎo)系統(tǒng)層面, 無法滿足導(dǎo)引系統(tǒng)抗干擾性能評(píng)估的問題, 本文在分析抗干擾過程中制導(dǎo)系統(tǒng)內(nèi)部誤差傳遞原理的基礎(chǔ)上, 基于導(dǎo)引系統(tǒng)的測量誤差, 提出了基于視線角速度精度的導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo), 從而在導(dǎo)引系統(tǒng)研制過程中, 能夠及時(shí)對(duì)其抗干擾性能進(jìn)行評(píng)估。 由于視線角速度精度在外場試驗(yàn)中不易測量, 為了提高該指標(biāo)的測試效率, 基于比例導(dǎo)引制導(dǎo)原理, 給出了視線角速度精度的簡化計(jì)算方法, 并針對(duì)非比例導(dǎo)引制導(dǎo)場景, 給出了利用識(shí)別時(shí)間對(duì)視線角速度精度進(jìn)行等效測試的方法。 外場數(shù)據(jù)測試結(jié)果表明, 該指標(biāo)能夠反映導(dǎo)彈在不同場景下的抗干擾性能, 具有一定合理性。
關(guān)鍵詞:???? 視線角速度; 抗干擾; 導(dǎo)引系統(tǒng); 識(shí)別時(shí)間; 評(píng)估指標(biāo); 導(dǎo)彈
中圖分類號(hào):??? ???TJ765
文獻(xiàn)標(biāo)識(shí)碼:??? A
文章編號(hào):??? ?1673-5048(2024)01-0066-05
DOI: 10.12132/ISSN.1673-5048.2023.0080
0 引? 言
隨著紅外對(duì)抗技術(shù)的迅猛發(fā)展, 紅外成像導(dǎo)引系統(tǒng)所面臨的戰(zhàn)場環(huán)境日趨復(fù)雜, 近距格斗導(dǎo)彈作戰(zhàn)過程中必將伴隨激烈的光電對(duì)抗和大機(jī)動(dòng)過載, 沒有干擾的凈空作戰(zhàn)環(huán)境基本不存在, 導(dǎo)彈的抗干擾性能是決定導(dǎo)彈作戰(zhàn)效能的重要指標(biāo)[1]。
為了解決抗干擾性能定量評(píng)估的問題, 傳統(tǒng)的抗干擾性能評(píng)估方法綜合利用導(dǎo)彈在數(shù)字仿真、 半實(shí)物仿真及實(shí)彈靶試中的數(shù)據(jù), 形成基于制導(dǎo)精度要求的綜合抗干擾概率, 目前國內(nèi)外抗干擾性能評(píng)估主要集中在制導(dǎo)系統(tǒng), 評(píng)估指標(biāo)的研究熱點(diǎn)集中在不同試驗(yàn)系統(tǒng)抗干擾概率的綜合計(jì)算方法上。 王濤等人[2]從時(shí)域、 頻域、 能量域、 空域和信息域等維度研究了紅外導(dǎo)彈的抗干擾評(píng)估方法, 并進(jìn)行了仿真驗(yàn)證。 龐艷靜[3]提出了基于層次分析法的導(dǎo)彈抗干擾能力評(píng)估方法。 楊貝爾等人[4]提出利用層次分析法計(jì)算各環(huán)境條件等級(jí)的加權(quán)系數(shù), 從分級(jí)對(duì)抗環(huán)境中選取典型作戰(zhàn)條件進(jìn)行數(shù)字仿真試驗(yàn), 加權(quán)求和得到抗干擾概率, 完成導(dǎo)彈綜合抗干擾性能評(píng)估。 方丹等人[1]給出了一種對(duì)地面復(fù)雜干擾環(huán)境的紅外成像導(dǎo)引系統(tǒng)抗干擾性能評(píng)估方法, 運(yùn)用Bayes 估計(jì)的方法建立紅外成像導(dǎo)引系統(tǒng)抗干擾概率計(jì)算模型。
目前, 導(dǎo)引系統(tǒng)的抗干擾性能評(píng)估指標(biāo)往往采用制導(dǎo)系統(tǒng)的抗干擾概率進(jìn)行評(píng)估[5-6], 該指標(biāo)混淆了導(dǎo)引系統(tǒng)和制導(dǎo)系統(tǒng)的功能要求[7], 導(dǎo)引系統(tǒng)無法輸出脫靶量等制導(dǎo)精度考核指標(biāo), 無法形成抗干擾概率, 該指標(biāo)無法有效指導(dǎo)導(dǎo)引系統(tǒng)的抗干擾設(shè)計(jì)和評(píng)估。 在研制及訓(xùn)練過程中, 除了可生成脫靶量的靶試試驗(yàn)和內(nèi)場數(shù)字、 半實(shí)物仿真試驗(yàn)外, 往往開展大量空中系留試驗(yàn)和導(dǎo)引系統(tǒng)內(nèi)場測試試驗(yàn)。 由于內(nèi)場試驗(yàn)無法生成脫靶量, 無法利用數(shù)字仿真、 半實(shí)物仿真及實(shí)彈靶試中的脫靶量等制導(dǎo)精度指標(biāo)進(jìn)行考核, 導(dǎo)致試驗(yàn)結(jié)果缺少合適的指標(biāo)進(jìn)行考核與評(píng)估, 無法與傳統(tǒng)的基于制導(dǎo)精度的抗干擾性能評(píng)估方法進(jìn)行融合, 造成系留試驗(yàn)及導(dǎo)引系統(tǒng)內(nèi)場仿真試驗(yàn)數(shù)據(jù)的極大浪費(fèi)。
本文基于導(dǎo)引系統(tǒng)輸出的視線角速度這一重要量測信息, 重新定義導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo), 并以此為基礎(chǔ), 對(duì)系留試驗(yàn)中導(dǎo)引系統(tǒng)的抗干擾性能指標(biāo)進(jìn)行簡化和等效設(shè)計(jì), 該指標(biāo)的設(shè)計(jì)基礎(chǔ)為導(dǎo)引系統(tǒng)輸出的測量誤差, 因此, 其不僅可以應(yīng)用于系留試驗(yàn)中導(dǎo)引系統(tǒng)的抗干擾性能評(píng)估, 也可以應(yīng)用于內(nèi)場數(shù)字、 半實(shí)物仿真試驗(yàn)及外場試驗(yàn)中的導(dǎo)引系統(tǒng)抗干擾性能評(píng)估。
1 導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo)設(shè)計(jì)
導(dǎo)引系統(tǒng)主要由探測系統(tǒng)、 信息處理軟件、 控制與跟蹤系統(tǒng)組成。 探測系統(tǒng)接收來自外部的紅外輻射, 形成數(shù)字灰度圖像, 信息處理軟件對(duì)圖像進(jìn)行處理, 實(shí)現(xiàn)目標(biāo)的檢測、 識(shí)別和跟蹤, 提取目標(biāo)在視場中的位置信號(hào)給控制與跟蹤系統(tǒng), 再利用該信號(hào)完成導(dǎo)引系統(tǒng)的控制與跟蹤功能, 并向制導(dǎo)系統(tǒng)輸出視線角速度用于形成制導(dǎo)信號(hào)。
導(dǎo)引系統(tǒng)在干擾的擾動(dòng)下, 出現(xiàn)識(shí)別錯(cuò)誤或跟蹤被擾動(dòng), 導(dǎo)致其對(duì)目標(biāo)的測量誤差增大, 導(dǎo)引系統(tǒng)輸出的視線角速度誤差增大, 其測量的視線角速度與彈目實(shí)際的視線角速度不一致, 該變化量引起飛行控制系統(tǒng)的制導(dǎo)指令發(fā)生變化, 是制導(dǎo)系統(tǒng)制導(dǎo)誤差的主要來源。 在抗干擾過程中, 制導(dǎo)精度決定導(dǎo)彈能否命中目標(biāo), 因此, 明確導(dǎo)引系統(tǒng)在干擾擾動(dòng)過程中視線角速度誤差對(duì)制導(dǎo)系統(tǒng)制導(dǎo)精度的影響機(jī)理, 是設(shè)計(jì)導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo)的基礎(chǔ)。
抗干擾過程中, 導(dǎo)引系統(tǒng)跟蹤目標(biāo)的典型過程是: 先跟蹤目標(biāo), 干擾起燃后, 跟蹤目標(biāo)與干擾重合體, 目標(biāo)與干擾分離后, 導(dǎo)引系統(tǒng)成功識(shí)別目標(biāo), 重新跟蹤目標(biāo)。 文獻(xiàn)[7]中, 在導(dǎo)彈導(dǎo)引系統(tǒng)被干擾擾動(dòng)過程中引入延時(shí)和擾動(dòng)[8], 利用伴隨分析方法[9], 通過以下公式描述視線角速度與制導(dǎo)精度之間關(guān)系, 即
令函數(shù)G表示為
函數(shù)G反映了導(dǎo)彈飛行過程中在不同時(shí)間點(diǎn)上, 導(dǎo)彈過載對(duì)制導(dǎo)精度的影響。
從式(2)可以看出, 隨著彈道時(shí)間t的增加, 在相同的比例導(dǎo)引系數(shù)和制導(dǎo)時(shí)間常數(shù)下, 函數(shù)G的結(jié)果是非線性變化的, 因此, 在導(dǎo)彈飛行過程中, 相同過載對(duì)制導(dǎo)精度的影響也是非線性的, 其結(jié)果需要復(fù)雜的計(jì)算過程。
2 視線角速度精度的簡化與等效測試
利用視線角速度精度能夠有效考核導(dǎo)引系統(tǒng)的抗干擾性能, 但其存在難以計(jì)算的問題。 一方面, 制導(dǎo)系統(tǒng)需要給出全彈道過程中的視線角速度精度要求, 該值與彈道條件、 干擾投放策略及剩余飛行時(shí)間等諸多因素相關(guān), 在多組干擾投放條件下, 視線角速度精度的分配方式較為復(fù)雜, 為了便于試驗(yàn)開展, 視線角速度精度的計(jì)算需要簡化; 另一方面, 視線角速度精度的計(jì)算需要目標(biāo)真實(shí)的視線角速度, 該值在數(shù)字仿真和半實(shí)物仿真中可以從仿真模型中計(jì)算, 但在系留試驗(yàn)和外場試驗(yàn)中, 無論是載機(jī)雷達(dá)還是地面雷達(dá), 其測量的目標(biāo)真實(shí)視線角速度精度遠(yuǎn)低于導(dǎo)引系統(tǒng)的測量結(jié)果, 無法精確反映導(dǎo)引系統(tǒng)測量的視線角速度精度, 需要計(jì)算視線角速度精度的等效測試量, 滿足系留試驗(yàn)及外場試驗(yàn)中紅外導(dǎo)引系統(tǒng)抗干擾性能的評(píng)估要求。
2.1 視線角速度精度的簡化計(jì)算
導(dǎo)彈飛行中, 由于干擾投放時(shí)刻導(dǎo)彈剩余飛行時(shí)間的不同, 對(duì)導(dǎo)引系統(tǒng)視線角速度精度的要求也不一樣, 為了便于測試, 對(duì)視線角速度精度按照剩余飛行時(shí)間進(jìn)行分段設(shè)計(jì),
由式(2)中的e-t/T可知, 當(dāng)剩余飛行時(shí)間t與制導(dǎo)時(shí)間常數(shù)T的比值大于等于7時(shí), e-t/T將接近于0, 如圖1
所示。 函數(shù)G的計(jì)算趨于0, 視線角速度精度的要求趨于無限大, 即該情況下, 視線角速度誤差對(duì)制導(dǎo)精度影響不大。
假設(shè)當(dāng)剩余飛行時(shí)間t與制導(dǎo)時(shí)間常數(shù)T的比值小
式中: j為干擾投放點(diǎn), j=1,? 2,? …,? k。 式(5)利用干擾各個(gè)投放點(diǎn)函數(shù)G的最大值模擬干擾的擾動(dòng)分布, 因此, 一般情況下, 該模型的視線角速度精度要求更高。
式(5)基于干擾投放時(shí)剩余飛行時(shí)間與制導(dǎo)時(shí)間常數(shù)的比值, 構(gòu)造了簡單的視線角速度精度要求的分段計(jì)算方法, 在比值大于等于7時(shí), 對(duì)視線角速度精度不做要求, 只要導(dǎo)引系統(tǒng)不會(huì)始終跟蹤干擾即可; 在比值小于1時(shí), 飛行控制系統(tǒng)無法再響應(yīng)導(dǎo)引系統(tǒng)信號(hào), 因此, 對(duì)視線角度精度不作要求; 當(dāng)7>t/T≥1時(shí), 計(jì)算固定值作為視線角速度精度的要求, 在測試產(chǎn)品確定后, 制導(dǎo)時(shí)間常數(shù)T、 比例導(dǎo)引系數(shù)N均為已知, 接近速度Vc可以選擇典型值進(jìn)行估算。 式(5)給出了視線角速度精度的簡單構(gòu)造方法, 僅與干擾投放時(shí)機(jī)、 干擾投放顆數(shù)、 彈目交會(huì)方向相關(guān), 便于指標(biāo)的設(shè)計(jì)與測試, 可以在彈道條件確定后, 給出不同彈道剩余時(shí)間下對(duì)視線角速度精度的估算值。
2.2 視線角速度精度的等效測試
基于比例導(dǎo)引原理, 將視線角速度精度簡化如式(5)所示, 相較于式(4), 簡化公式便于測試, 能夠在數(shù)字仿真、 半實(shí)物仿真和外場試驗(yàn)中評(píng)估導(dǎo)引系統(tǒng)的抗干擾性能。 但在系留試驗(yàn)中, 導(dǎo)彈隨著載機(jī)進(jìn)行運(yùn)動(dòng), 不是基于比例導(dǎo)引的自主飛行, 真實(shí)的視線角速度是不斷變化的, 不能簡化處理, 無論是載機(jī)雷達(dá)還是地面雷達(dá), 其測量的目標(biāo)真實(shí)視線角速度精度遠(yuǎn)低于導(dǎo)引系統(tǒng)的測量結(jié)果, 無法精確反映導(dǎo)引系統(tǒng)測量的視線角速度精度, 需要計(jì)算視線角速度精度的等效測試量, 以滿足系留試驗(yàn)中導(dǎo)引系統(tǒng)抗干擾性能評(píng)估的需求。
由于外場試驗(yàn)中, 真實(shí)的視線角速度無法提取, 因此, 將制導(dǎo)系統(tǒng)對(duì)視線角速度精度的約束轉(zhuǎn)化為對(duì)視線角速度的約束, 將式(4)變更為
綜合式(1)和式(6)可以看出, 對(duì)視線角速度有影響的是比例導(dǎo)引系數(shù)N、 制導(dǎo)時(shí)間常數(shù)T、 視線上的接近速度Vc及干擾引起擾動(dòng)的不同時(shí)刻點(diǎn)ti, i=1,? 2,? …,? 2k, 不考慮干擾之間的擾動(dòng)疊加關(guān)系, 則與干擾投放顆數(shù)一致。 由于比例導(dǎo)引系數(shù)N、 制導(dǎo)時(shí)間常數(shù)T依據(jù)制導(dǎo)系統(tǒng)的性能確定具體參數(shù), 視線上的接近速度Vc與目標(biāo)和導(dǎo)彈飛行速度相關(guān), 不便作為指標(biāo), 因此, 本文重點(diǎn)分析系留試驗(yàn)條件下, 干擾引起擾動(dòng)的不同時(shí)刻點(diǎn)ti與視線角速度的關(guān)系。
在式(7)中, 取比例導(dǎo)引系數(shù)N為4, 制導(dǎo)時(shí)間常數(shù)T為0.5 s, 可得函數(shù)G與干擾引起擾動(dòng)的不同時(shí)刻點(diǎn)ti的關(guān)系如圖2所示。
由圖2可以看出, 不同時(shí)刻點(diǎn)的擾動(dòng), 造成函數(shù)G的擾動(dòng)幅度不同。 在剩余飛行時(shí)間為2.5 s時(shí)有一個(gè)擾動(dòng)波峰, 在剩余飛行時(shí)間1.5 s以內(nèi), 擾動(dòng)幅度迅速上升, 并在剩余飛行時(shí)間為0.5 s時(shí)達(dá)到整個(gè)彈道的峰值, 因此, 在上述時(shí)間點(diǎn)的擾動(dòng), 將造成函數(shù)G的擾動(dòng)幅度增大; 同時(shí), 導(dǎo)引系統(tǒng)輸出的視線角速度也將增大, 造成制導(dǎo)精度迅速增大。 因此, 導(dǎo)引系統(tǒng)應(yīng)盡量避免在上述時(shí)間點(diǎn)的跳動(dòng)。
干擾投放后, 導(dǎo)引系統(tǒng)從跟蹤目標(biāo)變化為跟蹤干擾與目標(biāo)的重合體, 將造成擾動(dòng); 干擾與目標(biāo)分離后, 導(dǎo)引系統(tǒng)識(shí)別并跟蹤目標(biāo), 也將造成擾動(dòng)。 因此, 擾動(dòng)時(shí)間點(diǎn)主要由干擾投放時(shí)刻點(diǎn)和導(dǎo)引系統(tǒng)識(shí)別時(shí)間決定。 本文利用上述兩個(gè)因素設(shè)計(jì)系留試驗(yàn)中視線角速度精度的等效測試指標(biāo):
式中: Δt為從干擾投放到導(dǎo)引系統(tǒng)識(shí)別出目標(biāo)的時(shí)間; t為干擾投放時(shí)刻點(diǎn), 其計(jì)算方式為同樣對(duì)抗條件下, 導(dǎo)彈發(fā)射后的剩余時(shí)間; T為制導(dǎo)系統(tǒng)時(shí)間常數(shù); aT為同樣對(duì)抗條件數(shù)字仿真試驗(yàn)下, 在不同時(shí)刻點(diǎn)施加系留試驗(yàn)同等數(shù)量干擾擾動(dòng)后, 脫靶量滿足制導(dǎo)精度要求的擾動(dòng)點(diǎn)最小剩余時(shí)間。
假設(shè)系留試驗(yàn)條件經(jīng)數(shù)字仿真系統(tǒng)閉環(huán)仿真后, 經(jīng)統(tǒng)計(jì)計(jì)算, a取值為2, 則干擾投放時(shí)剩余飛行時(shí)間(計(jì)算方式為同樣對(duì)抗條件下, 導(dǎo)彈發(fā)射后的剩余時(shí)間)大于10倍制導(dǎo)時(shí)間常數(shù)時(shí), 導(dǎo)引系統(tǒng)只要不一直跟蹤干擾即可, 對(duì)識(shí)別時(shí)間沒有要求; 干擾投放時(shí)剩余飛行時(shí)間介于2倍至10倍制導(dǎo)時(shí)間常數(shù)時(shí), 導(dǎo)引系統(tǒng)需要在要求的時(shí)間內(nèi)識(shí)別出目標(biāo); 隨著剩余飛行時(shí)間的減少, 要求的識(shí)別時(shí)間也將減少, 識(shí)別時(shí)間不大于投放點(diǎn)剩余時(shí)間與2倍制導(dǎo)時(shí)間常數(shù)的時(shí)間, 避免擾動(dòng)點(diǎn)均在2倍制導(dǎo)時(shí)間常數(shù)處產(chǎn)生; 干擾投放時(shí)剩余飛行時(shí)間介于1倍至2倍制導(dǎo)時(shí)間常數(shù)時(shí), 該時(shí)間段內(nèi)投放干擾, 有較大的概率造成脫靶量增大, 僅僅減少識(shí)別時(shí)間, 也不能滿足制導(dǎo)精度要求, 導(dǎo)引系統(tǒng)需要在干擾與目標(biāo)分離后即可識(shí)別出目標(biāo), 同時(shí), 利用濾波、 預(yù)測等手段輸出視線角速度, 降低干擾擾動(dòng)的影響; 干擾投放時(shí)剩余飛行時(shí)間小于1倍制導(dǎo)時(shí)間常數(shù)時(shí), 制導(dǎo)系統(tǒng)來不及響應(yīng)導(dǎo)引系統(tǒng)信號(hào), 對(duì)識(shí)別時(shí)間無要求。
綜上, 本文基于制導(dǎo)系統(tǒng)誤差傳遞原理, 以導(dǎo)引系統(tǒng)的測量誤差為基礎(chǔ), 首先提出了基于視線角速度精度的導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo), 由于視線角速度真值無法在外場試驗(yàn)中獲取, 因此, 本文基于比例導(dǎo)引原理, 提出了視線角速度精度簡化計(jì)算方法, 且在系留試驗(yàn)中, 導(dǎo)彈不發(fā)射, 不符合比例導(dǎo)引原理, 因此, 本文提出了利用識(shí)別時(shí)間等效替代視線角速度的方法。
3 仿真分析
利用數(shù)字仿真系統(tǒng)及系留試驗(yàn)數(shù)據(jù)進(jìn)行仿真分析。
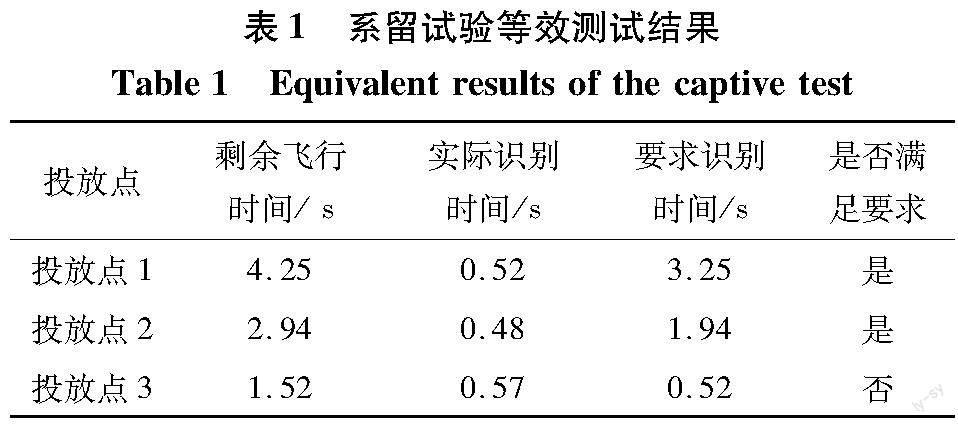
系留試驗(yàn)條件為分別在彈目距離3 km, 2 km和1 km處投放10顆間隔0.8 s的紅外誘餌彈。 干擾投放后, 導(dǎo)引系統(tǒng)均能正確識(shí)別出目標(biāo)。
利用該導(dǎo)彈虛擬樣機(jī)對(duì)相應(yīng)的系留條件進(jìn)行導(dǎo)彈發(fā)射狀態(tài)下的閉環(huán)仿真, 計(jì)算不同彈目距離投放點(diǎn)對(duì)應(yīng)閉環(huán)仿真條件下的剩余飛行時(shí)間, 統(tǒng)計(jì)在不同時(shí)刻點(diǎn)施加系留試驗(yàn)同等數(shù)量干擾擾動(dòng)后, 脫靶量滿足制導(dǎo)精度要求的擾動(dòng)點(diǎn)最小剩余時(shí)間aT為1 s, 該導(dǎo)彈制導(dǎo)系統(tǒng)時(shí)間常數(shù)T為0.5 s, 則a為2。 依據(jù)式(8), 計(jì)算要求的識(shí)別時(shí)間及等效測試結(jié)果如表1所示。
上述結(jié)果表明, 該導(dǎo)彈系留試驗(yàn)結(jié)果中, 投放點(diǎn)1和投放點(diǎn)2的抗干擾能力滿足導(dǎo)彈的制導(dǎo)精度要求, 盡管在投放點(diǎn)3正確識(shí)別出目標(biāo), 但由于干擾與目標(biāo)粘連等情況, 其識(shí)別時(shí)間稍長, 其抗干擾能力不滿足制導(dǎo)精度要求, 需要進(jìn)一步提高導(dǎo)引系統(tǒng)近距目標(biāo)識(shí)別的快速性, 以提升該導(dǎo)彈近距抗干擾能力。
4 結(jié)? 論
本文基于制導(dǎo)系統(tǒng)和導(dǎo)引系統(tǒng)的功能需求差異, 分析了傳統(tǒng)導(dǎo)引系統(tǒng)抗干擾性能評(píng)估指標(biāo)的不足, 提出了基于制導(dǎo)精度傳遞規(guī)律的視線角速度精度分析方法, 將視線角速度精度指標(biāo)作為導(dǎo)引系統(tǒng)的抗干擾性能評(píng)估指標(biāo), 并給出了該評(píng)估指標(biāo)的計(jì)算方法、 簡化測試方法及等效測試方法, 從而在導(dǎo)引系統(tǒng)研制過程中, 能夠結(jié)合內(nèi)外場試驗(yàn)過程, 及時(shí)對(duì)其抗干擾性能進(jìn)行評(píng)估。
本文在揭示制導(dǎo)精度傳遞規(guī)律和指標(biāo)簡化設(shè)計(jì)時(shí), 為使模型便于計(jì)算, 進(jìn)行了多方面假設(shè), 例如, 多干擾投放對(duì)制導(dǎo)精度的影響實(shí)質(zhì)是一個(gè)復(fù)雜的相互影響過程, 本文將該過程簡化為線性系統(tǒng)疊加。 在后續(xù)研究中, 應(yīng)該結(jié)合具體數(shù)字仿真模型對(duì)計(jì)算過程進(jìn)行改進(jìn)。
參考文獻(xiàn):
[1] 方丹, 周永恒, 崔少輝, 等. 紅外成像導(dǎo)引頭抗干擾性能評(píng)估方法[J]. 火力與指揮控制, 2020, 45(6): 141-144.
Fang Dan, Zhou Yongheng, Cui Shaohui, et al. Research on Anti-Jamming Performance Evaluation Method of Infrared Imaging Seeker[J]. Fire Control & Command Control, 2020, 45(6): 141-144. (in Chinese)
[2] 王濤, 王祥. 紅外導(dǎo)彈抗干擾能力多維度評(píng)估方法[J]. 紅外技術(shù), 2014, 36(7): 573-576.
Wang Tao, Wang Xiang. An Evaluation Method with Five Dimensions for Infrared Missile Anti-Jamming[J]. Infrared Technology, 2014, 36(7): 573-576. (in Chinese)
[3] 龐艷靜. 基于層次分析法的某紅外導(dǎo)彈的抗干擾性能評(píng)估[J]. 紅外技術(shù), 2014, 36(3): 234-237.
Pang Yanjing. Evaluation of Infrared Missile Anti-Jamming Performance Based on the Analytic Hierarchy Process[J]. Infrared Technology, 2014, 36(3): 234-237.(in Chinese)
[4] 楊貝爾, 王楓, 唐善軍. 紅外導(dǎo)彈分系統(tǒng)抗干擾能力指標(biāo)體系研究[C]∥光學(xué)技術(shù)研討會(huì)暨交叉學(xué)科論壇論文集, 2017: 282-291.
Yang Beier, Wang Feng, Tang Shanjun. An Anti-Jamming Performance Specification System for the Subsystem of IR Missile[C]∥Proceedings of the Optical Technology and Application Symposium and Interdisciplinary Forum, 2017: 282-291. (in Chinese)
[5] 馬曉平, 趙良玉. 紅外導(dǎo)引頭關(guān)鍵技術(shù)國內(nèi)外研究現(xiàn)狀綜述[J]. 航空兵器, 2018 (3): 3-10.
Ma Xiaoping, Zhao Liangyu. An Overview of Infrared Seeker Key Technologies at Home and Abroad[J]. Aero Weaponry, 2018 (3): 3-10. (in Chinese)
[6] 李萍, 張波, 尚怡君. 基于紅外圖像和特征融合的飛機(jī)目標(biāo)識(shí)別方法[J]. 電光與控制, 2016, 23(8): 92-96.
Li Ping, Zhang Bo, Shang Yijun. Aircraft Target Identification Based on Infrared Image and Feature Fusion[J]. Electronics Optics & Control, 2016, 23(8): 92-96. (in Chinese)
[7] 張喜濤, 白曉東, 閆琳, 等. 紅外空空導(dǎo)彈抗干擾性能評(píng)估指標(biāo)體系研究[J]. 紅外技術(shù), 2020, 42(11): 1089-1094.
Zhang Xitao, Bai Xiaodong, Yan Lin, et al. Anti-Jamming Performance Evaluation Index System for Infrared Air-to-Air Missiles[J]. Infrared Technology, 2020, 42(11): 1089-1094. (in Chinese)
[8] 李炯, 張濤, 張金鵬, 等. 基于零效脫靶量的制導(dǎo)估計(jì)一體化方法[J]. 彈道學(xué)報(bào), 2017, 29(4): 35-39.
Li Jiong, Zhang Tao, Zhang Jinpeng, et al. Unitization Method of Guidance and Estimation Based on Zero-Effort-Miss[J]. Journal of Ballistics, 2017, 29(4): 35-39. (in Chinese)
[9] Wang W Q, Jia X H, Fu K S, et al. Guidance Precision Analysis Based on Airborne IRCM Stochastic Process[J]. Infrared Technology, 2019, 41(2): 163-170.
Research on Evaluation Index of Anti-Jamming Performance of
Guidance System Based on Line-of-Sight Angular Velocity Accuracy
Abstract: ?In response to the problem that traditional anti-interference performance evaluation indices are concentrated at the level of missile guidance systems, which cannot meet the anti-interference performance evaluation of guidance systems, based on the analysis of the internal error transmission principle of guidance systems during the anti-interference process and the measurement error of guidance systems, this paper proposes a guidance system anti-interference performance evaluation index based on line of sight angular velocity accuracy, so as to evaluate its anti-interference performance timely in the development process of guidance systems.Due to the difficulty for measurement of the line-of-sight angular velocity accuracy in field experiments, in order to improve the testing efficiency, a simplified calculation method for line-of-sight angular velocity accuracy is proposed based on the principle of proportional guidance. Furthermore, for non proportional guidance scenarios, an equivalent testing method for line-of-sight angular velocity accuracy using recognition time is given. The results of field data testing indicate that the indices can reflect the anti-interference performance of missile in different scenarios, and this method has certain rationality.
Key words: ?line-of-sight angular velocity; anti-jamming; guidance system; recognition time; performance index; missile
猜你喜歡
教育教學(xué)論壇(2017年6期)2017-03-04 21:15:39
物聯(lián)網(wǎng)技術(shù)(2016年12期)2017-01-21 21:57:39
山東體育學(xué)院學(xué)報(bào)(2016年5期)2017-01-18 20:44:10
檔案管理(2017年1期)2017-01-17 19:17:10
東方教育(2016年13期)2017-01-12 20:07:39
商業(yè)經(jīng)濟(jì)研究(2016年20期)2016-11-30 11:24:29
商(2016年30期)2016-11-09 09:14:31
理論導(dǎo)刊(2016年10期)2016-10-26 13:26:52
考試周刊(2016年80期)2016-10-24 17:32:15
商(2016年23期)2016-07-23 14:25:47