動態環境下自主機器人的雙機制切向避障
2024-03-29 09:00:40章一鳴姚文廣陳海進
浙江大學學報(工學版) 2024年4期
關鍵詞:規劃
章一鳴,姚文廣,陳海進
(1.南通大學 江蘇省專用集成電路設計重點實驗室,江蘇 南通,226001;2.傲拓科技股份有限公司,江蘇 南京,210012)
路徑規劃是指機器人根據環境或傳感器信息并在一系列約束下,規劃一條從起點到目標點的無碰撞路徑.隨著服務型機器人在智能家居應用中的普及,人們對于減少人為干預、提升服務型機器人自主性提出更高要求,廣大學者在該領域進行了大量研究并發展出許多可行算法[1-2].室內環境具有動態隨機性的特點,局部路徑規劃算法可以感知外部環境變化的特點,彌補了全局路徑規劃算法的不足,因此該算法成為學者的研究重點之一.
Molinos 等[3]提出動態窗口樹、運動曲線環境自適應以及多算法融合等方法,以改進動態窗口法(dynamic window approach,DWA)缺乏全局指導、局部最優的缺陷;代婉玉等[4]提出沿邊轉彎、速度與轉向角消息轉換機制以及區域分級策略等方法,改進時間彈性帶法(time elastic band,TEB)控制不穩定的缺陷.相較于DWA 和TEB,人工勢場法[5-6]的數學模型更簡單、計算復雜度更小,在實際動態環境中的實時性更優,但存在目標不可達、局部極小值陷阱問題.解決傳統人工勢場法的局部極小值陷阱問題主要采用如下3 種思路.1)改變勢場受力情況[7-8]:通過打破受力平衡狀態使機器人脫離陷阱.2)多算法融合[9]:切換其他路徑規劃算法引導機器人脫離陷阱.3)提前預測陷阱[10]:邊移動邊對外部環境進行預測,或者在機器人移動前提前堵住易陷入局部極小值陷阱的路徑.Yao 等[11]基于思路1)、3),提出黑洞勢場強化Q 學習的方法,在原有勢場中疊加黑洞勢場,通過黑洞力打破部分局部極小值陷阱處的受力平衡,同時通過強化學習使機器人自動學習跳出陷阱.該方法在不同環境下具有極強的適應能力,但額外添加的黑洞勢場會使力多重疊加,并且需要預先進行大量訓練.Min 等[12]基于思路3),提出經驗混合人工勢場法,將基礎案例推理與人工勢場法結合,創新性地將障礙物與線型、角度型2 種內置障礙物模型進行配準,并將過去躲避障礙物的經驗存儲在經驗庫中.該方法適用于未知與非結構化環境中實時避障,但無論是進行障礙物的檢索與匹配,還是進行避障經驗的查找都要耗費大量時間.
為了有效解決局部極小值陷阱,避免使用高性能GPU 進行訓練,實現動態環境下快速自主避障,本研究結合3 種思路對傳統人工勢場法進行改進,提出以靜態避障為主、動態避障為輔的雙機制切向避障.同時,為了獲取在亟需避障時及時避障、無須避障時快速返回最優路徑的效果,將基于狀態決策進行全局規劃模塊與局部規劃模塊的高效結合.
1 改進人工勢場法
1.1 傳統人工勢場法
1986 年Khatib[13]提出人工勢場法,該方法實現簡單,表達式為
式中:U(p) 為合力勢場函數,Uatt(p) 為引力勢場函數,Urep(p) 為斥力勢場函數,η 為引力增益系數,ρ(p,pgoal) 為機器人與目標點的歐氏距離,k為斥力增益系數,ρ(p,pobs) 為機器人與障礙物的歐氏距離,ρo為障礙物的斥力影響范圍.機器人對目標點生成引力,對障礙物生成斥力,對引力與斥力勢場函數求解負梯度后即可得到引力與斥力的數值.在勢場中,機器人通過疊加引力和斥力的方式得到合力,依據合力的大小與方向判斷下一步的移動軌跡.傳統人工勢場法存在以下缺陷:1)陷入局部極小值陷阱,如圖1 所示;2)躲避動態障礙物效果差.

圖1 傳統人工勢場法的局部極小值陷阱Fig.1 Local minimum trap of traditional artificial potential field method
1.2 人工勢場法下雙機制切向避障機制
1.2.1 陷阱預測 機器人在勢場中沿梯度下降方向移動,出現局部極小值陷阱的原因:引力與斥力共線反向,導致合力為0,運動陷入停滯.Hessian矩陣是對二階導數的矩陣描述,可以用來檢查梯度下降方向上的點是不是局部極小值點.本研究將通過Hessian 矩陣在全局地圖中預測局部極小值陷阱.
當函數定義在實數域且二階偏導數連續時,矩陣H為實對稱矩陣,進行特征分解:
式中:λ1、λ2為特征值;D=[d1,d2],其中d1、d2為特征值所對應的特征向量,同時也是標準正交向量.函數的方向二階導數表示為
在二元函數的臨界點處,二階方向導數的正負僅與特征值的正負相關.當特征值均為正時,Hessian矩陣正定,該點為局部極小值點;當特征值均為負時,Hessian 矩陣負定,該點為局部極大值點.假設選取的位置坐標與目標點的距離為x、與障礙物的距離為y、機器人所受合力勢場為U(x,y),那么合力勢場函數表達式為
對式(4)求偏導數組成二階Hessian 矩陣:
將選取的位置坐標代入式(5)進行特征分解后,依據特征值正負判斷當前采樣點是不是局部極小值點.
1.2.2 柵格地圖預處理 柵格地圖的分辨率大小影響地圖的精細度.當柵格分辨率設置較大,建圖時將丟失部分細節;當分辨率設置較小,需要更多的存儲空間和計算資源,但表示的地圖信息更加詳細.為了減輕當全局地圖相對較大時陷阱預測的計算壓力,在不影響地圖精細度的情況下,在對柵格地圖進行縮放處理后再進行陷阱預測,如圖2 所示.建圖時按圖2(a)(分辨率為0.05 m)進行柵格映射.地圖預處理時,當20×20 柵格內存在占據柵格時,縮放至10×10 柵格后標注為占據柵格,否則為空閑柵格,從而將20×20 柵格內的不規則障礙物縮放為圖2(b)側1 號占據柵格(分辨率為1 m).經過縮放后的柵格地圖資源占用減少0.75,需要遍歷的空閑柵格坐標大大減少.

圖2 柵格地圖金字塔縮放Fig.2 Grid map pyramid scaling
縮放后,柵格地圖的右半部分占據柵格密度較大,相較于空閑柵格密度較大的左半部分更易陷入局部極小值陷阱.為了進一步減少陷阱預測的計算量,通過區域搜索,選取存在局部極小值陷阱概率更高的障礙物密集區域,遍歷該區域中梯度下降方向上的空閑坐標點,計算Hessian 矩陣特征值檢測是否存在局部極小值陷阱,如圖3 所示.以縮放后全局地圖原點為起始點構建長度為2t+1的搜索框,按從左向右、從下往上的順序將地圖分成數塊小區域,計算每塊小區域內障礙物的疏密度:
式中:a、b為占據概率與非連通障礙物占比的權重系數,NG為搜索框中占據柵格的數量,RG為柵格分辨率,NNO為搜索框中非連通障礙物的數量,NT為搜索框中連通與非連通障礙物的總數.連通障礙物的判定條件如下.條件1:縮放后的柵格為占據柵格.條件2:縮放后占據柵格的八鄰域柵格內存在占據柵格.定義同時滿足2 個判定條件的障礙物為連通障礙物(圖3 中2、3、5 號障礙物),其他的均為非連通障礙物(圖3 中1、4 號障礙物).得到非連通障礙物坐標后,無論形狀大小,都視為以該坐標為圓心、半徑固定的虛擬圓,斥力方向跟隨機器人位置的變化而變化;連通障礙物是占據區域且形狀不固定,因此固定其斥力方向.
如圖4 所示,機器人在不同位置僅受到來自一個方向的斥力作用,具體判定規則如下.
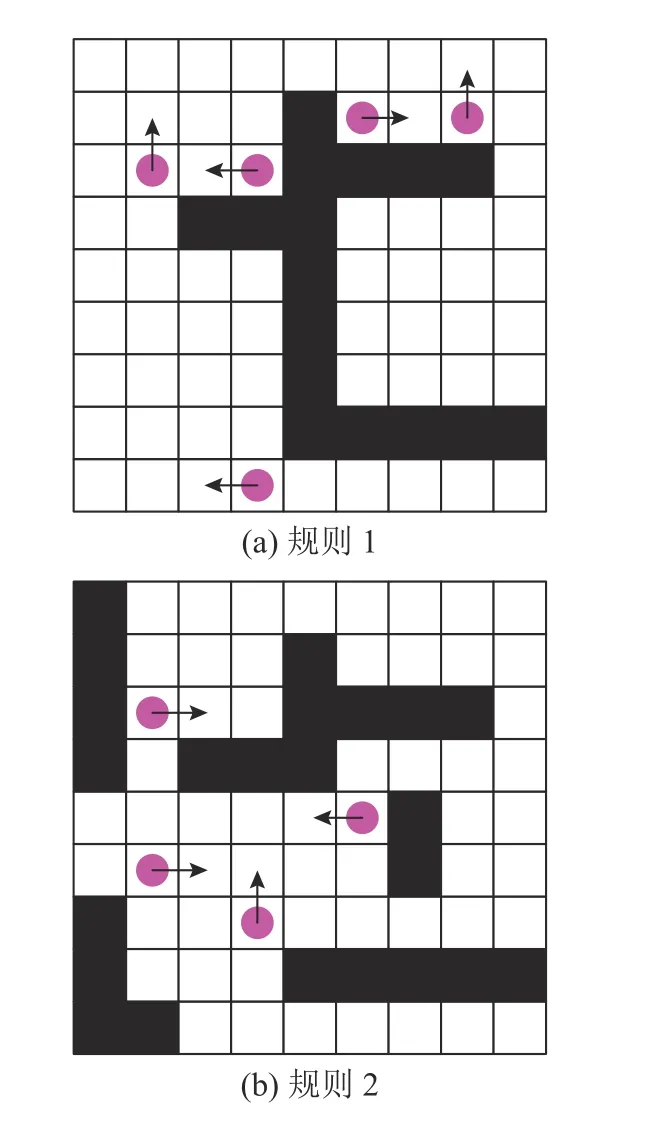
圖4 連通障礙物斥力方向判定Fig.4 Direction determination of repulsive force for connected obstacles
規則1(條件3 與條件4 與條件5):機器人所受單個連通障礙物的斥力,方向垂直于優先級最高的占據柵格.條件3:機器人周圍僅一個連通障礙物.條件4:機器人位于該連通障礙物的斥力影響范圍內.條件5:機器人左側占據柵格優先級>右側占據柵格優先級>上側占據柵格優先級>下側占據柵格優先級.
規則2(條件6 與條件7 與條件8):機器人所受多個連通障礙物的斥力,方向來自距離最近的連通障礙物,斥力方向選擇遵循規則1.條件6:機器人周圍存在多個連通障礙物.條件7:機器人位于多個連通障礙物的斥力影響范圍內.條件8:機器人與多個連通障礙物的距離差較大且存在最小值.
規則3(條件6 與條件7 與條件9 與條件10):機器人所受多個連通物的斥力,方向來自優先級最高的連通障礙物,斥力方向選擇遵循規則1.條件9:機器人與多個連通障礙物的距離差較小.條件10:左側連通障礙物優先級>右側連通障礙物優先級>上側連通障礙物優先級>下側連通障礙物優先級.
1.2.3 靜態切向避障機制 對于連通障礙物,通過勢場法結合斥力方向判定規則,機器人在不同位置僅受到來自一個方向的斥力,減少了因在C 形、U 形連通障礙物區域受到來自不同方向斥力的疊加而陷入局部極小值陷阱的問題.
針對非連通障礙物,提出切向避障的機制,避免機器人面對非連通障礙物時陷入局部極小值陷阱.機器人只需在障礙物影響移動路徑時進行避障,為此進行非連通障礙物的重要性評估,將非連通障礙物分成重要障礙物與普通障礙物.當機器人與障礙物的距離小于2 倍 ρo且機器人與障礙物的夾角小于60°時,該障礙物為重要障礙物;當機器人與障礙物的距離大于等于2 倍 ρo或機器人與障礙物的夾角大于等于60°時,該障礙物為普通障礙物.如圖5 所示,非連通障礙物1 為重要障礙物,非連通障礙物2 為普通障礙物,在同一時刻僅有一個重要障礙物,機器人圍繞非連通障礙物1完成避障后才進行下一輪重要性評估.
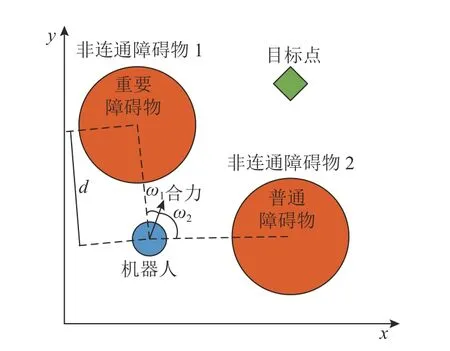
圖5 非連通障礙物重要性評估Fig.5 Importance evaluation of non-connected obstacles
針對重要障礙物,將其斥力影響范圍劃分為人工勢場區域(寬度r3)、切向避障區域(寬度r2)以及安全距離區域(寬度r1),如圖6 所示.陷阱預測后,若存在一組局部極小值點 (xm,ym),3 個區域的劃分寬度為
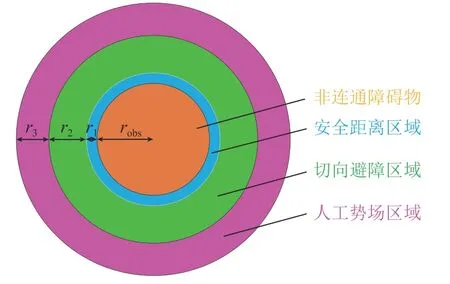
圖6 非連通障礙物斥力影響范圍劃分Fig.6 Influence range division of repulsive force for non-connected obstacles
式中:robs為非連通障礙物半徑;為局部極小值點與周圍障礙物最小距離的平均值,為局部極小值點與周圍障礙物最大距離的平均值,
若陷阱預測后未檢測到局部極小值點,3 個區域的劃分寬度為
式中:rinf為非連通障礙物虛擬圓向外膨脹的寬度.通過區域劃分,將局部極小值陷阱所在位置限制在切向避障區域內,該區域不受原勢場的控制,從而避免陷入局部極小值陷阱.機器人進入安全距離區域后采取緊急制動,避免與障礙物發生碰撞;在人工勢場區域保持原人工勢場控制;在切向避障區域不斷將斥力分力Frep1的方向調整為避障切線方向,如圖7 所示.
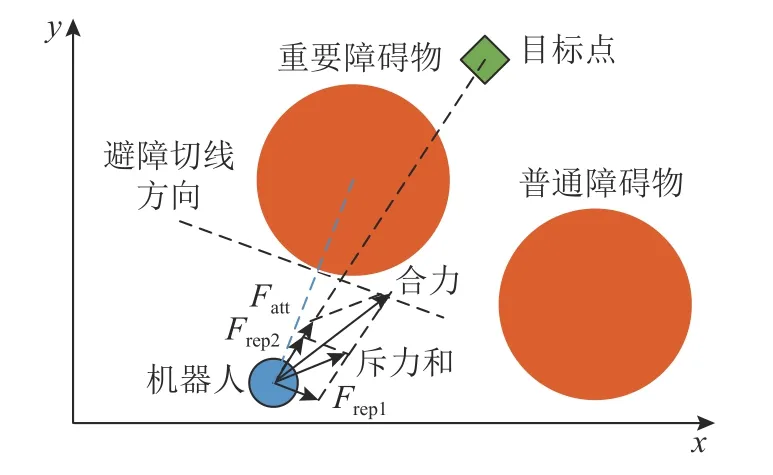
圖7 非連通障礙物靜態切向避障Fig.7 Static tangential obstacle avoidance for non-connected obstacles
將斥力分力調整為避障切線方向原因如下:假設機器人為1 個質點,那么完成避障的極限角度為機器人當前所在位置與重要障礙物的切線方向,如圖8(c)合力1;當斥力和向逆時針方向旋轉,合力與障礙物存在交集或向偏離引力和方向移動,導致與障礙物碰撞或繞行;斥力和方向順時針旋轉,合力貼近引力和方向,實現對重要障礙物的最優避障.當旋轉角度小于避障切線方向、大于極限角度,合力方向如圖8(e)合力3,機器人與重要障礙物的距離較小;旋轉角度大于避障切線方向時,合力方向如圖8(f)合力4,與普通障礙物存在碰撞風險.結合上述分析并開展多組仿真實驗,斥力分力調整為避障切線方向,如圖8(d)合力2,避障效果較優,靜態切向避障的過程如圖9 所示.
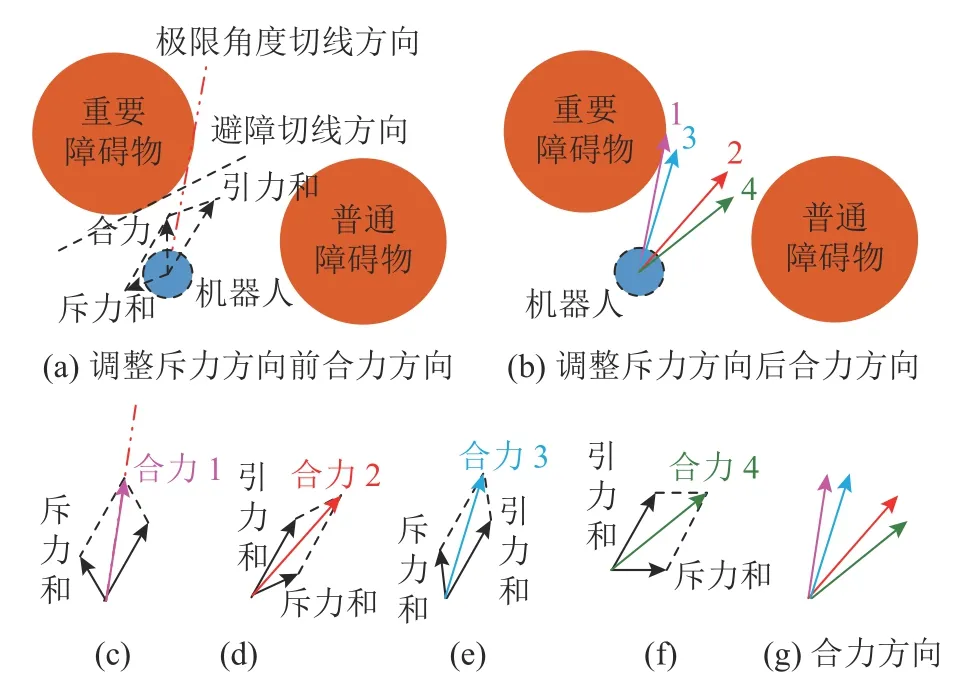
圖8 斥力調整方向后的合力方向分析Fig.8 Analysis of resultant force direction after repulsive force adjustment

圖9 靜態切向避障流程圖Fig.9 Flowchart of static tangential obstacle avoidance
1.2.4 動態切向避障機制 傳統人工勢場法的勢場函數僅考慮機器人與障礙物的相對距離,未考慮機器人與動態障礙物間相對速度.由于不同的動態障礙物具有不同的速度,有時動態障礙物的出現與機器人無碰撞風險,有時機器人周圍會出現多個動態障礙物.在障礙物斥力影響范圍內,將式(1)中斥力勢場函數改進為
式中:Urep(p,v) 為適用于動態環境的斥力勢場;Urep(v) 為障礙物速度產生的斥力勢場;kwar為碰撞風險系數,當機器人與障礙物的相對速度小于等于0 m/s,若機器人與障礙物的距離大于等于2 m且合力與障礙物的夾角大于等于60°,設置kwar=-1,為最低避障優先級,代表機器人無需進行避障.當機器人與障礙物的相對速度大于0 m/s,若機器人與障礙物的距離小于2 m 或合力與障礙物的夾角小于60°,設置kwar=1,為次低避障優先級;若機器人與障礙物的距離小于2 m 且合力與障礙物的夾角小于60°,設置kwar=2,為次高避障優先級;若機器人與障礙物的距離小于0.4 m,設置kwar=3,為最高避障優先級.設置kwar=1、2、3 代表機器人需要避障且必須選擇目前避障優先級最高的動態障礙物進行避障.
靜態切向避障機制是在障礙物靜止不動的前提下進行切向避障,對于動態障礙物,該機制須改進,如圖10 所示.圖中,速度為Vobs的動態障礙物與機器人相向而行且距離較近,存在碰撞風險.因此在原合力與動態障礙物的夾角 γ 的基礎上補償角度 θ,得到新航向角 | |γ|+θ|,機器人沿新航向角進行避障,計算式為
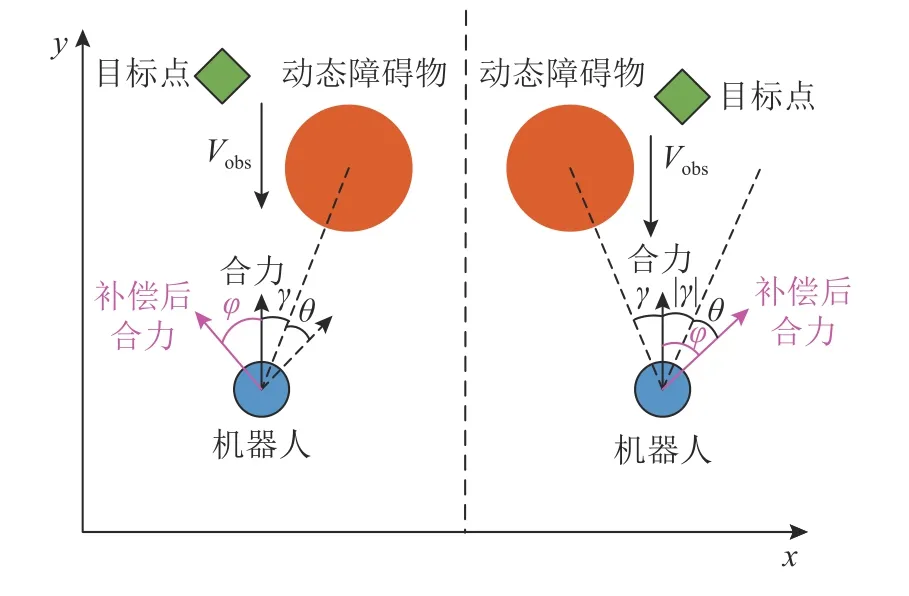
圖10 動態切向避障補償角的補償原理Fig.10 Compensation principle of compensation angle for dynamic tangential obstacle avoidance
式中:m為新航向角正反偏系數.當夾角 γ 為負角時,新航向角正偏(航向角為正),否則負偏(航向角為負),角度正負關系以逆時針方向為正.補償角 θ 由模糊控制器依據機器人與動態障礙物間的情況給出,
式中:ε 為避障補償角模糊控制器的輸出,{PB,MD,PS,ZE}為補償角的模糊語言變量.
2 基于雙機制切向避障的混合路徑規劃系統設計
2.1 系統設計
如圖11 所示為本研究方法的系統框架.全局路徑規劃單元與經過地圖預處理后的局部路徑規劃單元通過狀態決策決定控制狀態.若規劃的全局路徑與膨脹后的障礙物仍存在一定距離或未檢測到初始靜態地圖中不存在的障礙物,由全局路徑規劃單元控制;反之,由局部路徑規劃單元控制.狀態決策的轉移過程如圖12 所示.

圖11 混合路徑規劃模塊系統框圖Fig.11 Block diagram of mixed path planning module system
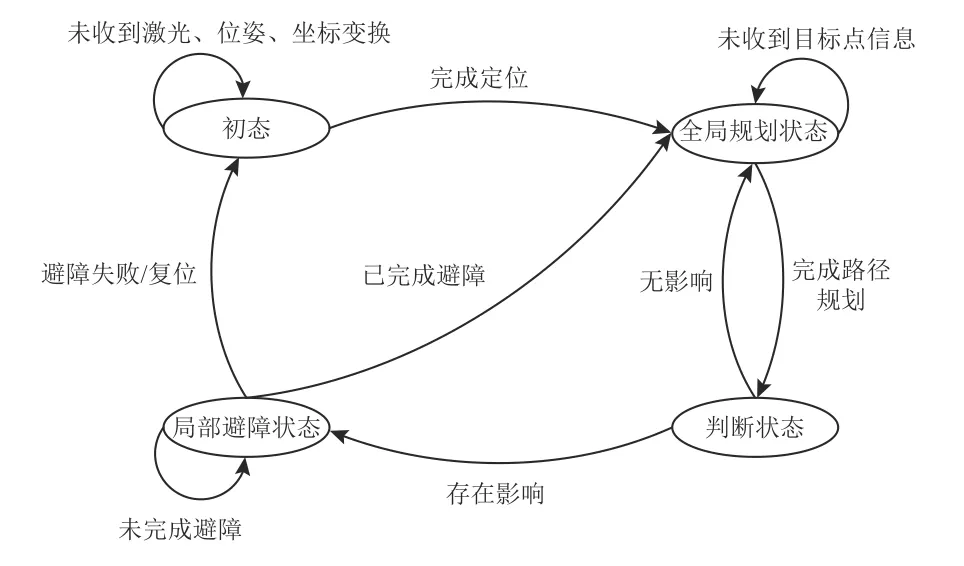
圖12 混合路徑規劃狀態決策過程Fig.12 Decision process of mixed path planning state
基于上述狀態決策思想統籌全局路徑規劃與雙機制切向避障,實現混合路徑規劃,流程如圖13所示.1)初始化勢場法參數:輸入起點、終點坐標、小車線速度、角速度等,轉至步驟2).2)全局路徑規劃:進行一次全局路徑與局部路徑規劃,在該狀態下全局路徑優先級高于局部路徑,機器人沿全局路徑移動,移動一段距離后進行優先級判斷,轉至步驟3).3)路徑優先級判斷:計算機器人與全局路徑前進方向上障礙物的距離,檢測是否存在距離全局路徑較近的障礙物或臨時出現的靜態、動態障礙物,影響機器人移動安全性.若存在這樣的障礙物,進入局部路徑規劃,轉至步驟4);若不存在,則輸出全局路徑軌跡,轉至步驟5).4)局部路徑規劃:根據機器人與障礙物的相對速度決定進行靜態或動態避障,動態障礙物在勢場下進行動態切向避障,非連通靜態障礙物在勢場下進行靜態切向避障,連通靜態障礙物在勢場下固定斥力方向,優先級調整為局部路徑高于全局路徑,并以當前位置為起點重新進行一次全局規劃;選取全局路徑前進方向上一點作為臨時目標點,機器人沿局部避障路徑向該點移動;輸出局部避障軌跡,轉至步驟5).5)判斷是否到達臨時目標點:若已到達,轉至步驟6);否則轉至步驟4).6)判斷機器人是否完成避障:若完成避障,轉至步驟7),否則保持局部路徑規劃狀態直至到達臨時目標點;如果選取的臨時目標點附近存在突發障礙物時,則重新進行一次全局路徑規劃并選取一點作為新臨時目標點.若避障失敗,機器人陷入停滯,則復位至步驟1)開始一輪全新的規劃.7)結束:完成本輪路徑規劃.

圖13 混合路徑規劃算法流程圖Fig.13 Flowchart of mixed path planning algorithms
2.2 局部規劃模糊控制器設計
本研究設計的雙機制切向避障通過判斷機器人與障礙物的距離、夾角后確定是否避障,這與模糊控制不需要過程的精確模型的特點較為貼合,因此將模糊控制與雙機制切向避障相結合來實現局部規劃模糊控制器設計.Mamdani 法是機器人控制中常用的模糊方法,中心去模糊法是重心法與最大隸屬度法去模糊的折中,因此本研究采用這2 種方法進行模糊化與解模糊.
將切向避障模糊控制器設計成三輸入一輸出,模糊變量語義對照如表1 所示.將機器人與障礙物的距離d、合力與障礙物的角度ω、引力與調整后斥力分力Frep1的夾角 δ作為輸入,共制定30 條模糊規則.機器人根據輸出 output 判斷在勢場中受人工勢場控制、切向避障、緊急制動,如當距離d為近(DN)、角度ω 為負(NS)、夾角 δ 為大(QB)時,機器人進行向右切向避障(RQM).避障補償角模糊控制器以機器人與動態障礙物的距離d、夾角 |γ| 以及相對速度Vrel為輸入,以動態補償角θ的大小 ε 作為輸出,共制定125 條模糊規則,模糊變量語義對照如表2 所示.
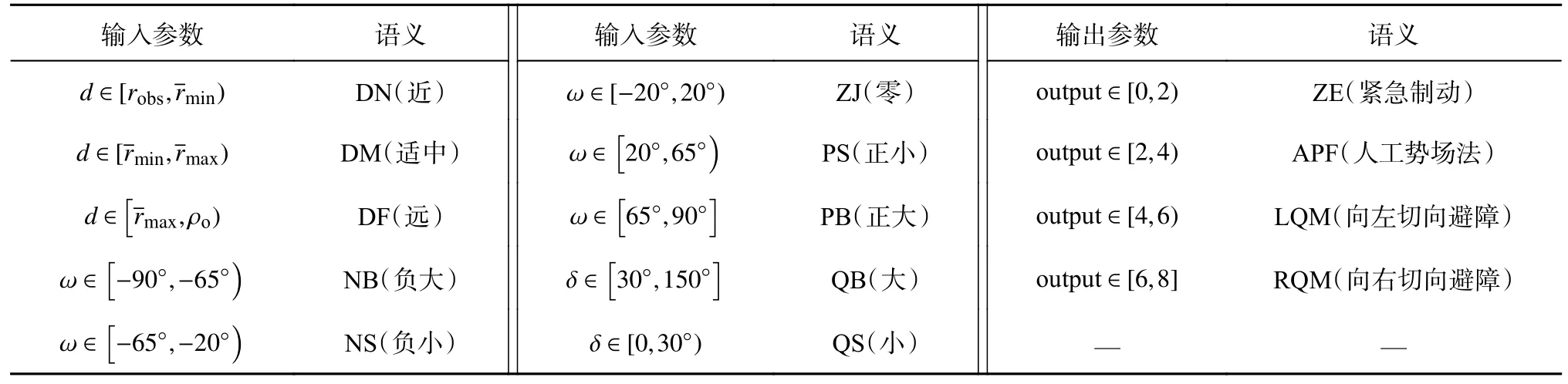
表1 切向避障語義對照表Tab.1 Semantic comparison table of tangential obstacle avoidance
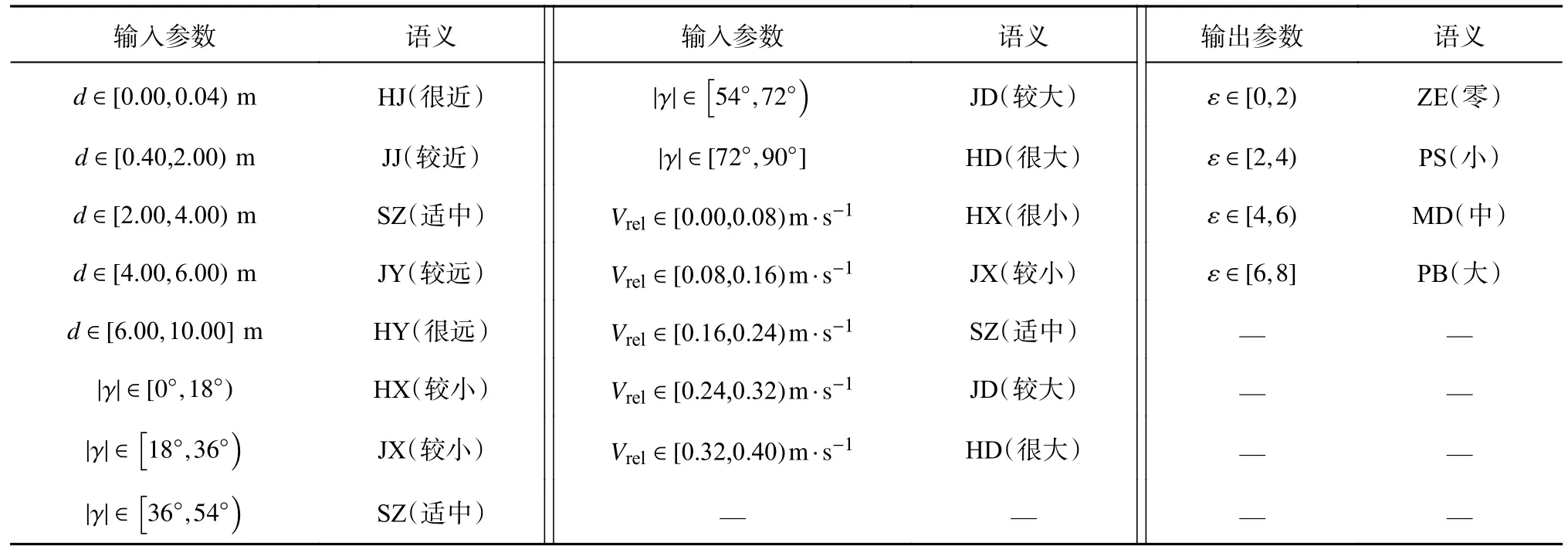
表2 避障角補償語義對照表Tab.2 Semantic comparison table of obstacle avoidance angle compensation
3 仿真驗證與實物平臺測試
3.1 仿真環境下算法有效性驗證
為了驗證所提算法的性能,開展機器人使用不同算法在易陷入局部極小值陷阱、狹窄可行區域避障的對比實驗,參與對比的算法包括本研究算法、沿邊走法、虛擬目標點法和虛擬障礙法.如圖14 所示,搭建60 m×60 m 的二維實驗環境,起點與目標點分別在(0,0)和(50,50),引力增益系數與斥力增益系數設置為20、30,機器人的移動步長為0.7 m,非連通障礙物的斥力影響范圍設置為障礙物的半徑加5 m.在如圖14(a)的實驗環境中,4 種算法都到達目標點,但本研究方法路徑更短、更平滑.如圖14(b)的實驗環境為易陷入局部極小值陷阱與產生路徑震蕩現象的狹長U 形區域.虛擬目標點法[14]規劃失敗,在U 形陷阱內陷入循環狀態;沿邊走法[15]進入U 陷阱后,沿著連通障礙物的邊界移動,逃脫了局部較小值陷阱,路徑明顯較長;虛擬障礙物法[16]未陷入局部極小值陷阱,但在連通障礙物間狹窄通道存在路徑震蕩現象;本研究方法未產生其他參與對比算法的缺陷.在不同復雜度的實驗環境中統計4 種算法的規劃結果,如表3 所示,表中,C為規劃成功次數,T為完成規劃運行時間,L為規劃路徑的總長,S為規劃路徑中的拐點數.可以看出,在不同環境復雜度下,本研究方法完成規劃的穩定性較高,平均運行時間相較于沿邊走法、虛擬目標點法、虛擬障礙物法分別提高21%、20%、19%;在復雜環境下的提升效果尤佳,平均運行時間分別提高33%、23%、20%.
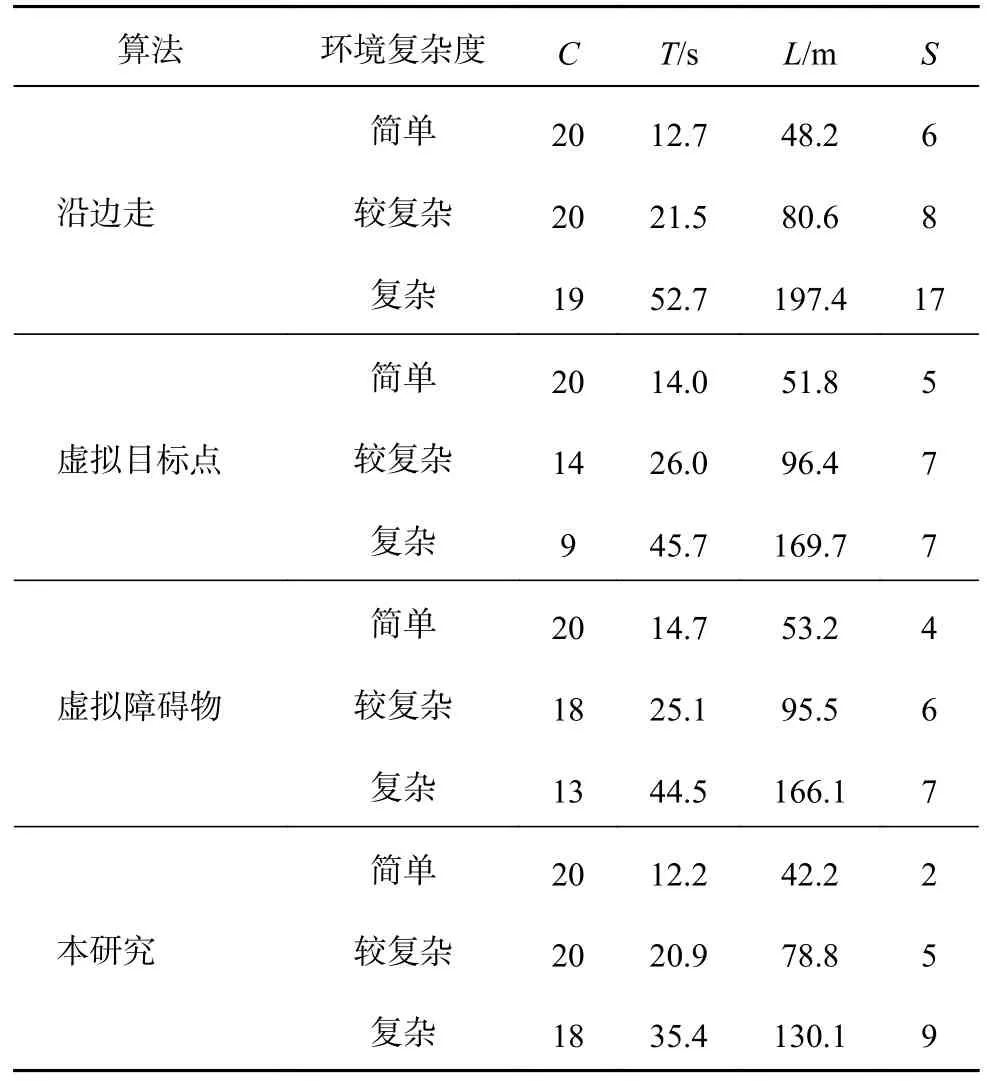
表3 不同環境復雜度時不同算法的規劃結果統計Tab.3 Statistics of different algorithm planning results for different environmental complexity

圖14 不同仿真環境下改進人工勢場法性能對比Fig.14 Performance comparison of improved artificial potential field method under different simulation environments
在Gazebo 仿真平臺搭建如圖15(a)所示仿真環境,其中t=2.0、η=10.0、k=6.0、ρo=1.8,算法與機器人的其他相關參數如表4 所示.利用Rviz 觀測機器人運動狀態.機器人接收到目標點后,進入全局規劃狀態,淺色為全局路徑,深色為局部路徑.當全局路徑與障礙物距離較小時,考慮到機器人轉向半徑,路徑安全性較低,須增大與障礙物的距離,進入局部避障狀態,此時局部路徑優先級高于全局路徑,機器人沿局部路徑進行避障,如圖15(b)所示.
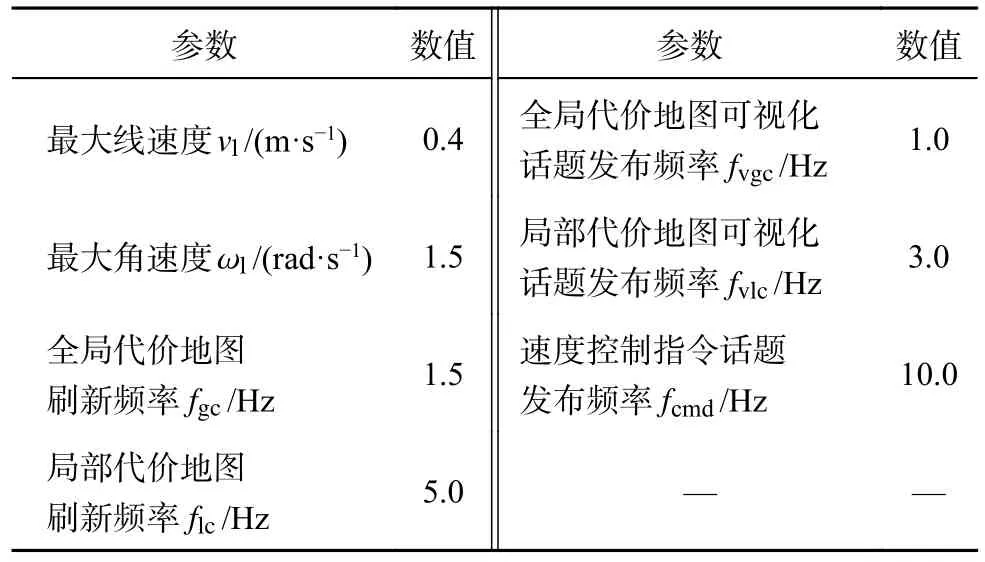
表4 仿真環境下混合路徑規劃模塊實驗參數Tab.4 Experimental parameters of mixed path planning module in simulation environment
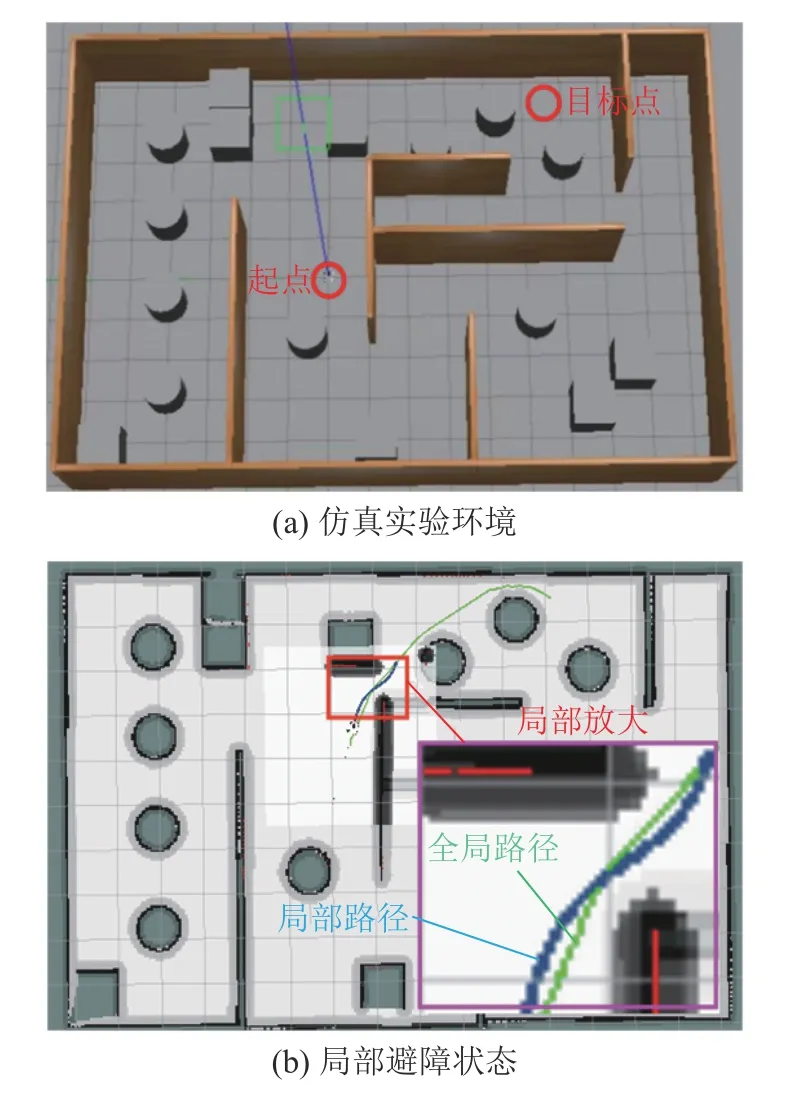
圖15 Gazebo 仿真環境的避障驗證Fig.15 Obstacle avoidance verification of Gazebo simulation environment
3.2 實物平臺測試
為了進一步驗證所提算法在真實環境中的性能,搭建全向移動平臺.機器人的激光雷達數據由鐳神N10P 提供;機器人操作系統主要平臺為樹莓派4B 系統核心板;采用底盤控制器主控(型號為STM32F407ZET6)接收并解析上位機發布的速度指令驅動電機轉動.
3.2.1 室內環境下靜態障礙物避障測試 在不同的實驗環境中對全向移動平臺開展避障測試.圖16(a)、(b)中,機器人在地圖1 中由于固定斥力方向,受到優先級最高的上側連通障礙物1 與左側連通障礙物2 的斥力作用,固定斥力方向垂直向下與垂直向右,不再疊加其他連通障礙物斥力,深色避障路徑相較于淺色全局路徑,明顯與障礙物保持充裕的安全距離,避免發生碰撞.圖16(c)、(d)中,在地圖2 中以易產生受力平衡的C 形、U 形區域為起點進行規劃,機器人未陷入停滯狀態并成功到達目標點.圖16(e)、(f)中機器人對存在影響的非連通障礙物2 與4 進行靜態切向避障,對不存在影響的非連通障礙物3 不進行避障,并且未在多個非連通障礙物間陷入停滯.測試結果表明,本研究的靜態避障機制在不同環境中實現了自主避障,在幾種典型的易陷入局部極小值陷阱的連通或非連通障礙物環境中,也有效避免了機器人陷入停滯狀態.
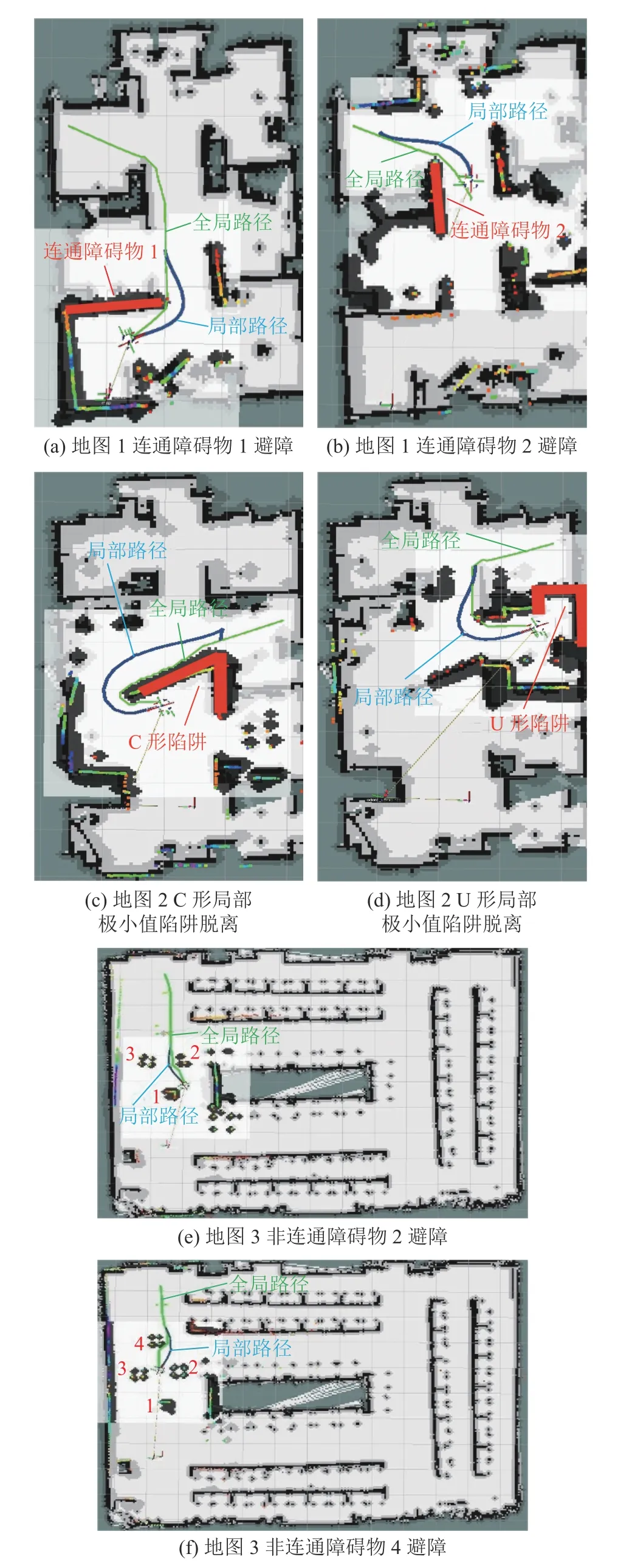
圖16 室內環境下靜態避障結果Fig.16 Static obstacle avoidance results in indoor environment
將局部規劃器采用DWA、TEB 在圖16 的3 幅地圖中進行25 次多點導航測試,并逐步向地圖中添加障礙物改變環境復雜度,結果如圖17(a)所示,TN為平均導航耗時,c為路徑規劃成功次數.在起點與目標點相同的情況下,本研究方法成功完成路徑規劃73 次,比DWA 多22 次,比TEB 多2 次;平均導航耗時比DWA 提升了39%、比TEB 提升了22%.圖17(b)中,TOA為平均完成一次避障的用時.將3 種算法完成對連通、非連通障礙物以及易陷入局部極小值陷阱的U 形障礙物區域的平均避障時間進行對比,本研究方法所耗費的時間最小,比DWA 提升了55%,比TEB 提升了40%.
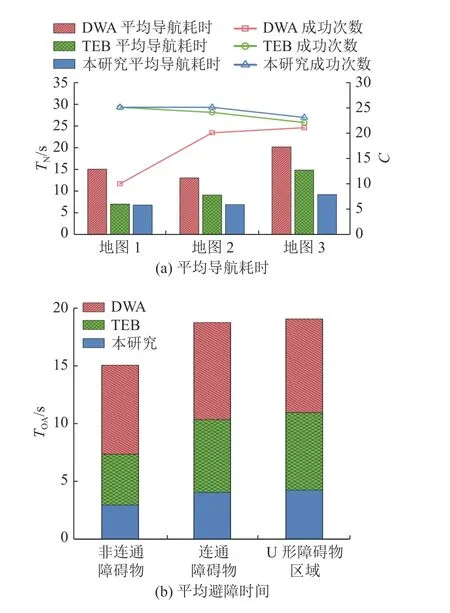
圖17 全向移動平臺測試結果比對Fig.17 Test results comparison of omnidirectional mobile platforms
3.2.2 室內環境下動態障礙物避障測試 如圖18所示,進行本研究方法躲避行人的有效性驗證實驗.實驗結果表明,機器人進行避障角補償后能夠躲避行人.可以看出,1 號人員與機器人的相對距離較近、夾角較小,風險系數為次高避障優先級,2 號人員與機器人的夾角較大,風險系數為次低避障優先級,對1 號人員進行避障角補償符合規則.
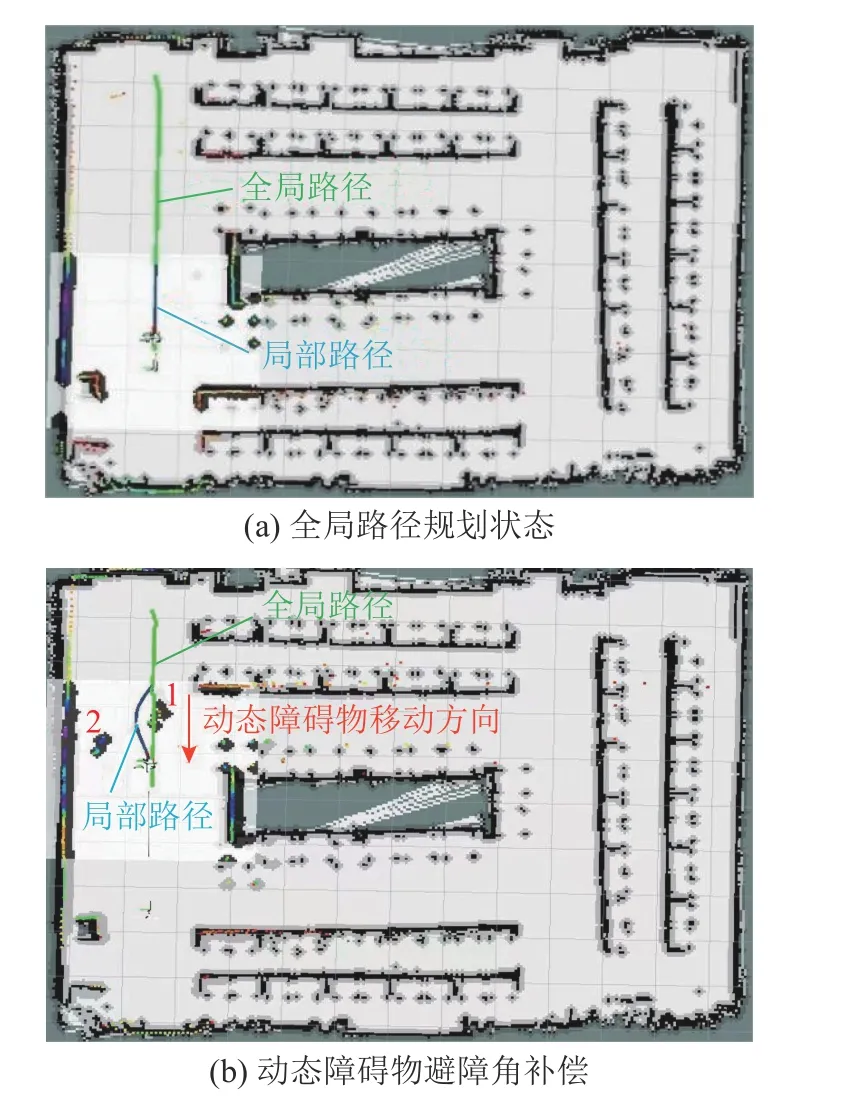
圖18 室內環境下動態避障結果Fig.18 Dynamic obstacle avoidance results in indoor environment
4 結語
本研究提出基于人工勢場法的雙機制切向避障算法.所提算法將障礙物分成連通與非連通障礙物,并針對阻礙實現自主避障的局部極小值陷阱采取不同解決策略.采用人工勢場法并固定連通障礙物斥力方向,減少了不同方向力的疊加,避免機器人陷入停滯;通過陷阱預測得到的局部極小值點,對非連通障礙物的斥力影響范圍進行劃分,將局部極小值陷阱限制在切向避障區域內,機器人進入該區域后進行切向避障避免陷入停滯.在此基礎上,針對室內環境中可能出現的動態障礙物,通過避障補償角實現動態切向避障.實驗結果表明,在不同的地圖中,相比主流算法,所提算法能夠在不同環境復雜度下有效避免陷入局部極小值陷阱,在避障耗時與整體導航耗時上有較大提升,在復雜環境中提升效果尤佳.同時,實物測試平臺的避障自主性較優,減少了人為干預.本研究須在規劃前對已完成建模的地圖環境進行陷阱預測,而在實際應用中地圖往往是未知的,未來計劃在本研究的基礎上進行未知環境下的實時陷阱預測研究.
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
