大長徑比遠程制導火箭彈自適應Super-twisting 控制方法
2024-03-20 00:37:30范軍芳閆華杰唐文桃趙國寧
中國慣性技術(shù)學報 2024年2期
關(guān)鍵詞:設計
范軍芳,閆華杰,紀 毅,唐文桃,趙國寧
(1.北京信息科技大學 自動化學院,北京 100192;2.高動態(tài)導航技術(shù)北京市重點實驗室,北京 100192;3.北京自動控制研究所,北京 100074)
大長徑比遠程制導火箭彈采用短時大推力火箭發(fā)動機,用于遠程大跨域點目標精準打擊任務,具有有效射程遠、作戰(zhàn)效費比高、靈活部署、機動性強等諸多優(yōu)勢。其在執(zhí)行遠程縱深目標打擊時,由于氣動參數(shù)攝動、外部干擾及自身結(jié)構(gòu)等特點,其飛行動壓、攻角等大范圍波動,飛行包絡增大,放大了參數(shù)非線性、不確定性及多通道耦合等復雜特性,顯著影響了射程、制導精度、姿態(tài)控制等性能[1]。為此,亟需研究具有對不確定性強自適應的大長徑比遠程制導火箭彈姿態(tài)控制技術(shù)。
比 例-積 分-微 分(Proportion-Integration-Differentiation,PID)方法作為一種經(jīng)典的控制方法,通過對系統(tǒng)過去(積分環(huán)節(jié))、現(xiàn)在(比例環(huán)節(jié))、未來(微分環(huán)節(jié))的狀態(tài)進行綜合評估,規(guī)避了系統(tǒng)動力學特征對控制效果的不利影響,故廣泛應用于包括遠程制導火箭彈控制系統(tǒng)在內(nèi)的多種飛行器系統(tǒng)中[2]。然而,PID 參數(shù)設計與調(diào)節(jié)依賴于工程師的經(jīng)驗,對強時變擾動適應性差,影響在復雜氣動環(huán)境中的控制效果。為提升PID 控制器的擾動抑制能力和進一步擴展其應用范圍,韓京清[3]提出了一種自抗擾控制理論,即通過“跟蹤微分器(Tracking Differentiator,TD)+狀態(tài)觀測器(Extended State Observer,ESO)+反饋(Feedback,FB)”的控制結(jié)構(gòu)強化PID 的控制效果。文獻[4]將自抗擾控制應用于空中作業(yè)機器人飛行平臺解決強噪聲、擾動、參數(shù)不確定性控制問題,通過仿真實驗驗證了所提出的控制方法具有噪、擾抑制能力。文獻[5]將自抗擾控制方法應用于導彈上升階段的高精度姿態(tài)控制中,仿真結(jié)果表明其在氣動參數(shù)不確定性和氣流帶來的擾動下具有較強的魯棒性。雖然自抗擾控制方法在相應控制系統(tǒng)中得到了有效的應用。但仍存在參數(shù)選擇、系統(tǒng)特性和計算資源難以滿足實時控制等不足。
滑模控制(Sliding Mode Control,SMC)具有較強魯棒性和抗擾動能力,已廣泛應用于導彈姿態(tài)控制與自動駕駛儀設計等相關(guān)領(lǐng)域[6,7]。文獻[8]將SMC 與反步法結(jié)合,應用于滾轉(zhuǎn)彈的彈道跟蹤問題中,有效應對了滾轉(zhuǎn)彈的參數(shù)不確定性與執(zhí)行器飽和問題。文獻[9]針對一類具有匹配不確定性和擾動的二階非線性系統(tǒng),設計了一種具有快速固定時間收斂特性的非奇異終端滑模控制方法,收斂速度較快,能量消耗低,具有較好的控制品質(zhì)。
SMC 雖然具有強魯棒性且一定程度能使系統(tǒng)在有限時間內(nèi)收斂,但仍存在高頻大幅振顫、執(zhí)行機構(gòu)時滯等現(xiàn)象,降低了遠程制導火箭彈能效比、甚至誘發(fā)執(zhí)行機構(gòu)失效。文獻[10]設計了Super-twisting 阻抗控制策略,其可有效地抑制普通滑模算法產(chǎn)生的抖振,但是需要已知干擾上界。為解決干擾上界未知的問題,文獻[11]提出一種自適應Super-twisting 算法,具有無需確定干擾上界的優(yōu)點,且可通過自適應因子加快收斂。文獻[12]設計了一種基于增益自適應滑模控制的姿態(tài)控制,基于Super-twisting 算法設計了有限時間收斂的姿態(tài)控制器,有效抑制了滑模控制中的抖振情況。文獻[13]針對飛行過程中彈道跟蹤的控制問題,結(jié)合自適應Super-twisting 算法設計了基于狀態(tài)偏差的跟蹤控制器,通過仿真驗證了存在初始狀態(tài)誤差下滑模彈道跟蹤方法的有效性和可行性,但只針對剛體運動做了建模仿真,并沒有考慮彈性模態(tài)的影響。相關(guān)研究表明,當旋轉(zhuǎn)飛行器的長徑比大于15 時,須考慮飛行器彈性模態(tài)的影響[14]。
本文針對具有輕質(zhì)薄殼結(jié)構(gòu)的大長徑比遠程制導火箭彈剛體-彈性體耦合動力學控制難題,提出了一種自適應Super-twisting 控制方法。首先,將大長徑比遠程制導火箭彈的彈性模態(tài)和不確定干擾項視為擾動,構(gòu)建了考慮剛體-彈性體耦合與氣動參數(shù)不確定性的動力學模型。其次,針對飛行過程中的干擾問題,設計了有限時間收斂擾動觀測器,以實現(xiàn)對擾動的實時精確估計。同時,在擾動上界信息未知的情況下,設計了參數(shù)自適應因子以提升控制器對不確定性的自適應能力。通過構(gòu)造Lyapunov 函數(shù)分別證明了控制器與觀測器的穩(wěn)定性與有限時間收斂特性。最后,通過仿真對比實驗驗證了本文所提控制方法的有效性與優(yōu)越性。
1 遠程制導火箭彈剛彈性動力學模型
縱向平面內(nèi),大長徑比遠程火箭彈動力學模型構(gòu)建如下[14]:
式(1)中:α為攻角,為攻角速率,γm為彈道傾角,θ為俯仰角,為俯仰角速率,m為火箭彈質(zhì)量,Vm為彈體速度,g為重力加速度,ωz為俯仰角速率,為俯仰角加速率,Jz為轉(zhuǎn)動慣量,L與M分別表示氣動力與氣動力矩為動壓,ρ為大氣密度,s為特征面積,l為特征長度,δz為舵偏角為氣動力學系數(shù)。火箭彈各姿態(tài)角度如圖1所示。
圖1 遠程制導火箭彈姿態(tài)角度關(guān)系示意圖Fig.1 Relationship of long-range guided rocket’s attitude angles
考慮到氣動參數(shù)辨識過程中的不確定性,將上述動力學參數(shù)可拆分為名義部分與不確定部分:
大長徑比運動體的彈性模量動力學表達式如下:
結(jié)合式(1)與式(4),考慮彈性效應的氣動力與氣動力矩可表示如下:
令x1=γm,x2=θ,x3=ωz,有以下動力學模型:
將式(2)(4)(5)代入式(6)后整理為狀態(tài)空間的形式,有如下形式:
假設1.存在兩個常數(shù)D1,max和D3,max,使得不等式恒成立。
大長徑比遠程制導火箭彈的控制目標可表述為:考慮式(6)所示動力學模型,在考慮彈性運動與系統(tǒng)建模誤差的條件下,設計等效執(zhí)行機構(gòu)指令δz,使制導火箭彈的實際彈道傾角γm實時跟蹤制導系統(tǒng)計算的彈道傾角指令γmd。控制系統(tǒng)設計流程圖如圖2 所示。

圖2 遠程制導火箭彈控制系統(tǒng)框圖Fig.2 Block diagram of a control system for a remotely guided rocket
2 有限時間收斂擾動觀測器設計
本節(jié)設計有限時間收斂觀測器以實現(xiàn)對擾動項d1和d3的精確估計。首先設計降階擾動觀測器,并通過Lyapunov 方法分析其有限時間收斂性能。之后,將上述方法應用于系統(tǒng)(7)中。
引理1[16]:假設存在以下Lyapunov 函數(shù)V(t):R+→R+且滿足:
那么,V(t)將在有限時間tf1之內(nèi)收斂至0,則tf1滿足:
式(10)中:α> 0,β> 0為設計參數(shù),V(0)為V(t)的初值。進一步,若V(t)滿足:
那么,V(t)將在有限時間tf2之內(nèi)收斂至0,tf2滿足:
式(12)中:a> 0,b> 0且0<c< 1為設計參數(shù)。
接下來設計降階有限時間收斂擾動觀測器。考慮如下一階系統(tǒng):
式(13)中:x為系統(tǒng)狀態(tài)變量,f(x)為已知系統(tǒng)狀態(tài),b為系統(tǒng)輸入增益,u為輸入控制量,d為未知或不確定擾動。
假設2.存在常數(shù)dmax> 0使得恒成立。
為實現(xiàn)對系統(tǒng)擾動d的實時估測,引入新變量?=x-χ,其中χ?R,按以下規(guī)律更新:
式(14)中:k1> 0,k2> 0,k3> 0為觀測器增益,p與q皆為正奇數(shù)且滿足p<q。
觀測器(14)的特性可用以下定理表述。
定理1.對于一階系統(tǒng)(13),設計以下非線性擾動估計器:
證明:選取如式(16)所示的Lyapunov 函數(shù)。
求式(16)的一階時間導數(shù),得:
進一步整理得:
由引理1 可知,Lyapunov 函數(shù)V1將在有限時間T1內(nèi)收斂,且T1符合以下不等式關(guān)系:
由此可得,當t>T1時,V1=0恒成立。此時,由式(16)關(guān)于V1的定義可得,當t>T1時,?˙=0恒成立。由d~的定義可知:
進而可推得,當t>T1時,=0恒成立。證明完畢。
將觀測器(14)應用于系統(tǒng)(7),則有:
則擾動d1和d3可按式(22)估計:
至此,可應用于考慮彈性效應的遠程制導火箭彈有限時間收斂擾動觀測器設計完畢。
3 基于Super-twisting 算法的自適應控制器設計與分析
3.1 自適應Super-twisting 控制器設計
假設t時刻制導系統(tǒng)所計算的彈道傾角指令為γmd(t),定義指令跟蹤誤差e1(t)=γm(t) -γmd(t)。定義滑模面s1=e1,對其求一階時間導數(shù),有:
視x2為控制量,同時以式(22)中估計值1替代擾動d1,設計式(25)所示的自適應Super-twisting 控制器:
式(25)中:α(t)和β(t)為自適應參數(shù)項,按式(26)所示更新如下:
式(26)中:α0> 0,β0> 0分別為α(t)和β(t)的初值,n> 0為一常數(shù),L(t)設計為連續(xù)的自適應因子函數(shù)。據(jù)此,式(25)中的φ(s1,L)可表示為:
注1.當L(t)恒定不變時,(t)=0,進而φ(s1,L)=0,α(t)和β(t)均為固定常數(shù)。此時,式(25)退化為普通Super-twisting 控制器。
引理2(楊氏不等式)[16]:對于任意非負常數(shù)a,b?R,當存在常數(shù)p,q?R且滿足時,以下不等式成立:
定理2.定義以下矩陣:
式(29)中:P為正定對角矩陣且滿足p11> 0,p22>0且p12p21<p11p22。
假設自適應因子函數(shù)L(t)有界且始終滿足其中L0為一常數(shù)在后,則當參數(shù)α0和β0滿足PA+ATP+μP+PBBTP+CTC≤ 0時(μ> 0為一常數(shù)),滑模面s1會在自適應Super-twisting 控制器(25)的作用下于有限時間內(nèi)收斂至零。
證明:引入如下中間向量:
則式(24)可改寫為:
對式(30)求時間導數(shù),得:
將式(31)代入式(32)中第一個等式,得:
進一步改寫為:
定義如下Lyapunov 函數(shù):
求式(38)的一階時間導數(shù),得:
由引理1 可得,V2將在有限時間T2內(nèi)收斂,且T2符合以下不等式關(guān)系:
證明完畢。
3.2 自適應因子函數(shù)設計
定理2 成立的條件為L(t) >ma x {L0,f(t)},即L(t)應始終大于f(t)。本小節(jié)基于雙層自適應方法設計自適應因子函數(shù)L(t),以滿足上述條件[17]。
首先,參考等效控制方法,確定式(31)在理想滑模狀態(tài)下的平衡點為[18]:
式(47)中:[sgn (s1(t))]eq為[ 0,t]時刻內(nèi)符號函數(shù)sgn(s1)的平均值,可設計一階低通濾波器估計:
式(48)中:τ? (0,1]為濾波器的時間常數(shù)。
據(jù)此,定義中間變量δ(t)為:
接下來,設計自適應因子函數(shù)L(t)為:
式(50)中:l0> 0為一常數(shù),l(t)按式(51)更新:
式(50)中:n0> 0,κ> 0均為設計參數(shù)。
首先分析式(52)第一項,對δ(t)求一階時間導數(shù),得:
將式(54)代入式(52),得:
證明完畢。
3.3 反步控制器設計
本小節(jié)利用反步法設計舵偏角指令,以使得真實彈道傾角實時跟蹤式(25)所示彈道傾角指令,進而使真實彈道傾角實時跟蹤制導系統(tǒng)生成的彈道傾角指令。
令z1=x1,對其求一階時間導數(shù),得:
根據(jù)式(25),設計虛擬控制量:
設計虛擬控制量:
式(61)中:υ11> 0,υ21> 0,0 <υ31< 1均為設計參數(shù)。
據(jù)此,設計舵偏角指令為:
式(63)中:υ12> 0,υ22> 0,0 <υ32< 1均為設計參數(shù)。
定理4.對于上述系統(tǒng),舵偏角控制律式(63)可以驅(qū)動系統(tǒng)狀態(tài)z1,z2,z3在有限時間內(nèi)收斂到零附近一個小區(qū)域。
證.對于上述反步法控制器構(gòu)造如下Lyapunov函數(shù):
故根據(jù)式(65)可以推出如下不等式:
由引理1 可知,Γ 在有限時間內(nèi)到達并保持在零域附近。結(jié)合定理4 可知,V6也可以收斂到零附近的一個小區(qū)域,即證明完畢。
4 仿真與分析
4.1 仿真條件設置
本節(jié)通過大長徑比遠程制導火箭彈的彈道傾角指令跟蹤仿真以驗證所提算法的有效性。初始條件為Vm=785 m/s,γm=0°,θ=0°,ts=0.001s,T=20s。大長徑比遠程制導火箭彈各參數(shù)如表1 所示。
表1 火箭彈參數(shù)表Tab.1 Parameter Table of Rocket
彈道傾角指令為γmd=10sin(t/10)°。彈性模態(tài)的阻尼比和固有頻率分別為ξ=0.03和ω=56[14]。引入舵偏角限制為了增加氣動參數(shù)不確定性,式(2)中的動力學參數(shù)拉偏15%,不確定部分成高斯分布。自適應控制器參數(shù)設置為α0=0.2,β0=0.1,l0=0.08,n0=0.08,K=5,m=0.99,ε=0.05,τ=0.1。擾動觀測器參數(shù)設置為k11=3,k21=0.01,k31=100,k13=3,k23=0.01,k33=100。反步控制器參數(shù)設置為v11=10,v21=50,v31=0.9,v12=10,v22=50,v32=0.9。
為驗證所提方法的有效性,本文設計的自適應Super-twisting 控制器記為“AST”,同時用滑模反演魯棒控制方法(SRC)[19]、有限時間收斂滑模控制器(Finite Time Convergence,FTC)[20]來進行對比仿真實驗,其控制律分別為式(67)和式(68)。
其中,控制器參數(shù)k1=0.9,k2=0.1,ε=0.1,σ=0.1,ω=10,M=0.5。
式(68)中,控制器參數(shù)設置為k=0.04,p=0.4,q=1。
由于符號函數(shù)sgn(s)的存在可能引起顫振,為避免此情況的發(fā)生,使用以下Sigmoid 函數(shù)對符號函數(shù)做近似替代:
AST 涉及到的式(25)、FTC 涉及到的式(64)、反步法涉及到的式(61)和式(63)包含的符號函數(shù)sgn(s)使用sgmf(s)代替,參數(shù)設置為Ψ=0.001。
4.2 仿真結(jié)果分析
仿真結(jié)果如圖3~圖10 所示,圖3 為彈道傾角控制指令與AST、FTC、SRC 三種控制器下的跟蹤曲線,三者皆能成功跟蹤指令信號。圖4 為彈道傾角控制指令信號與跟蹤信號的差值,由仿真結(jié)果可知AST 算法下火箭彈在飛行3.2 s 后收斂至0.002 鄰域附近,而SRC 算法與FTC 算法分別在8.1 s、19.7 s 時才收斂至此鄰域,且AST 算法下抖動更小,能更平穩(wěn)、更精確地跟蹤控制指令。

圖3 彈道傾角跟蹤Fig.3 Trajectory angle tracking

圖4 彈道傾角跟蹤誤差Fig.4 Trajectory angle tracking error
圖5 為控制舵偏角度,三種控制方法下控制舵偏角度均出現(xiàn)了初始階段飽和、抖振現(xiàn)象,這是滑模控制方法的固有特性引起的結(jié)果。由于系統(tǒng)初始階段彈道傾角跟蹤偏差大,所需控制量大,導致出現(xiàn)初始階段飽和現(xiàn)象。當控制器涉及的系統(tǒng)狀態(tài)超過參考指令時,又會有相反方向的控制量,故出現(xiàn)抖振現(xiàn)象。值得注意的是,AST 與SRC 控制下的系統(tǒng)在0.8 s 時脫離了飽和控制狀態(tài),而FTC 在1.5 s 時才脫離。雖然AST 控制下執(zhí)行機構(gòu)在0.8~2.8 s 時出現(xiàn)小幅抖振,但保持了較低的頻率(<10 Hz),對系統(tǒng)可靠性的影響較低。總的來說,AST 方法的控制輸出與SRC 整體相當,但AST 在抖振階段幅值更小。兩者的控制輸出都明顯優(yōu)于FTC 算法,比之更為平滑。

圖5 舵偏角Fig.5 Rudder deflection angle
系統(tǒng)狀態(tài)量曲線如圖6~圖8 所示,在三種控制方法作用下系統(tǒng)剛體運動狀態(tài)量α、θ、ωz和彈性模態(tài)狀態(tài)量η、η˙均能收斂到一定的穩(wěn)定值,其中α、θ跟隨彈道傾角指令規(guī)律變化,ωz在收斂至0.7 鄰域后,緩慢向0 趨近,η˙收斂至0.01 鄰域,這使得η在0.12鄰域達到平穩(wěn)后,緩慢向0 收斂。AST 控制下彈性模態(tài)振動較小,在0.5 s~2.5 s 時,振動幅值相比SRC 減少了35%,相比FTC 減少了10%。FTC 算法由于攻角收斂較慢、舵偏角飽和階段相比其它2 種方法延長了1 s 的原因,彈性模態(tài)在收斂過程中出現(xiàn)了1 次較大波動,使得彈性模態(tài)收斂時間相比AST、SRC 算法慢了1.5 s 左右。
圖6 攻角Fig.6 Angle of attack
圖9 為由氣動參數(shù)不確定性、彈性擾動帶來的實際誤差與擾動觀測器的估計誤差曲線,所設計的擾動觀測器對上述誤差做出了實時準確估計。圖10 為AST自適應控制器的自適應參數(shù)變化曲線,最終收斂至11~13.5 范圍內(nèi)波動。

圖9 狀態(tài)觀測器估計值Fig.9 State observer estimate
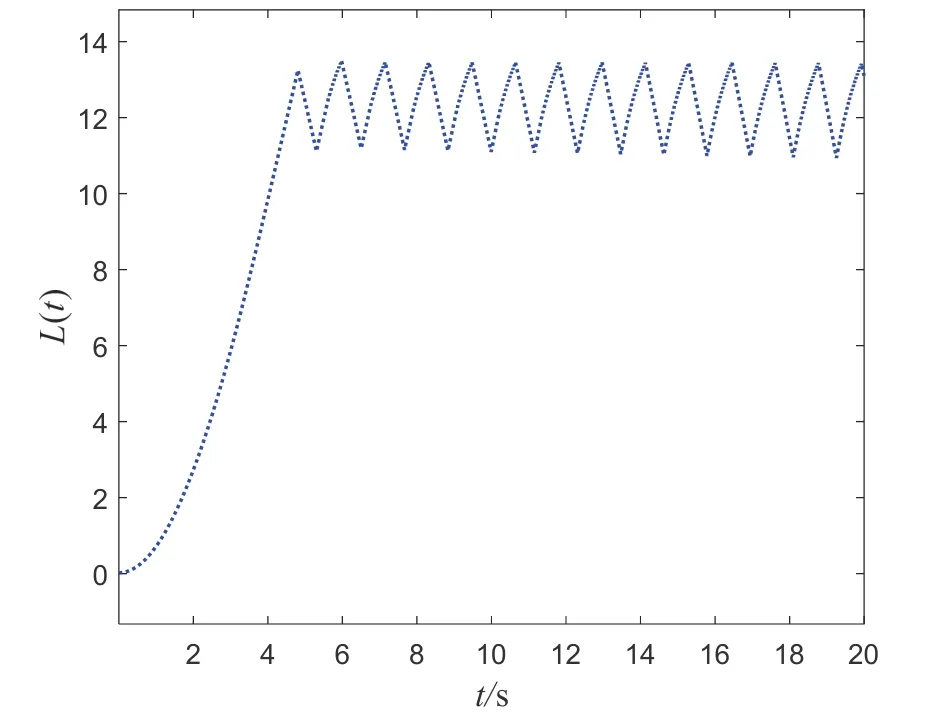
圖10 Super-twisting 控制器的自適應參數(shù)Fig.10 Adaptive parameters of the super-twisting controller
5 結(jié)論
本文針對具有輕質(zhì)薄殼結(jié)構(gòu)的大長徑比遠程制導火箭彈剛體-彈性體耦合動力學控制難題,提出了一種具有有限時間收斂功能的自適應Super-twisting 控制方法,具有以下優(yōu)勢:
1)將彈性模態(tài)與外部干擾項視為和歸一化擾動,建立了考慮參數(shù)、模型不確定性的大長徑比遠程制導火箭彈剛體-彈性體耦合動力學模型。
2)設計有限時間收斂擾動觀測器,以實現(xiàn)對擾動的實時精確估計。在擾動上界信息未知的情況下,設計了參數(shù)自適應因子自動調(diào)節(jié)控制參數(shù)以提升控制系統(tǒng)的魯棒性與自適應能力。
3)仿真實驗表明,本文所提控制方法能夠使大長徑比遠程制導火箭彈實現(xiàn)對彈道傾角指令的精確跟蹤。在彈體±15%氣動參數(shù)攝動的條件下,由平飛狀態(tài)轉(zhuǎn)變?yōu)楦櫡禐?0 的正弦彈道傾角指令時,實現(xiàn)3.2 s內(nèi)彈道傾角跟蹤誤差收斂至 0.002 °。相比于文獻[19][20]的方法,本文所提方法響應過程平穩(wěn)快速,同時能夠有效抑制彈性模態(tài)和外部干擾給姿態(tài)控制帶來的不良影響。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04