基于掃頻檢測(cè)的微機(jī)械陀螺耦合誤差系數(shù)辨識(shí)
2024-03-20 00:37:22鄭旭東夏陳浩王雪同佟文元
中國(guó)慣性技術(shù)學(xué)報(bào) 2024年2期
鄭旭東,夏陳浩,王雪同,佟文元
(浙江大學(xué) 航空航天學(xué)院,杭州 310007)
標(biāo)度因數(shù)與零偏是微機(jī)械(Micro Electromechanical System,MEMS)陀螺兩個(gè)重要的性能參數(shù),保持零偏和標(biāo)度因數(shù)的穩(wěn)定性是提升陀螺性能使其滿足導(dǎo)航需求的一個(gè)巨大的挑戰(zhàn)。然而,受到微機(jī)械加工工藝誤差、陀螺內(nèi)部損耗以及誤差源溫度敏感性等因素的影響,陀螺敏感結(jié)構(gòu)存在剛度耦合(又稱正交耦合)、阻尼耦合、力耦合等誤差因素,造成大量耦合誤差,嚴(yán)重影響了陀螺的零偏、標(biāo)度因數(shù)穩(wěn)定性等關(guān)鍵性能指標(biāo)[1,2]。
為了減小耦合誤差的影響、提高微機(jī)械陀螺的性能,國(guó)內(nèi)外諸多單位對(duì)包括剛度耦合、阻尼耦合、力耦合在內(nèi)的耦合誤差特性與補(bǔ)償技術(shù)進(jìn)行了理論分析與研究。其中,剛度耦合誤差信號(hào)與科氏信號(hào)相位正交,對(duì)陀螺性能的影響受解調(diào)相位的作用,文獻(xiàn)[3][4]通過設(shè)置正交抑制電極與正交抑制環(huán)路的方式抑制剛度耦合誤差;文獻(xiàn)[5]通過建立非理想陀螺系統(tǒng)實(shí)現(xiàn)耦合誤差的校正;文獻(xiàn)[6]在不改變結(jié)構(gòu)和電極配置的前提下,基于檢測(cè)模態(tài)反饋信號(hào)進(jìn)行正交補(bǔ)償。阻尼耦合誤差信號(hào)與科氏位移同頻且同相,直接影響陀螺輸出,文獻(xiàn)[7]采用模態(tài)反轉(zhuǎn)手段,將驅(qū)動(dòng)模態(tài)偏轉(zhuǎn)到阻尼軸方向消除阻尼耦合誤差;文獻(xiàn)[8]利用能量衰減法對(duì)全角陀螺阻尼耦合誤差進(jìn)行分析與補(bǔ)償。力耦合誤差信號(hào)與科氏位移同頻,且同時(shí)存在同相分量與正交分量,直接影響陀螺輸出,文獻(xiàn)[9]通過周期性地反轉(zhuǎn)驅(qū)動(dòng)力的極性,實(shí)現(xiàn)同相力耦合誤差的自補(bǔ)償。
以上研究雖然在一定程度上抑制了耦合誤差的影響,但對(duì)耦合誤差的作用機(jī)理缺乏定量說明。基于此,一些研究機(jī)構(gòu)針對(duì)耦合誤差系數(shù)的辨識(shí)提供了一些方案。文獻(xiàn)[10]基于靜電負(fù)剛度效應(yīng)改變諧振器的剛度分布與剛度值使其達(dá)到模態(tài)匹配,通過調(diào)諧電壓實(shí)現(xiàn)剛度耦合系數(shù)與激勵(lì)力偏轉(zhuǎn)角的辨識(shí);文獻(xiàn)[11]根據(jù)振動(dòng)和模態(tài)理論,基于掃頻測(cè)試數(shù)據(jù)實(shí)現(xiàn)了對(duì)剛度耦合系數(shù)、阻尼耦合系數(shù)與驅(qū)動(dòng)力不對(duì)稱系數(shù)的辨識(shí);文獻(xiàn)[12]同樣基于陀螺頻域特性,利用掃頻測(cè)試數(shù)據(jù)實(shí)現(xiàn)了對(duì)剛度耦合系數(shù)與阻尼耦合系數(shù)的辨識(shí);文獻(xiàn)[13]根據(jù)非理想陀螺動(dòng)力學(xué)方程結(jié)合衰減法實(shí)現(xiàn)了阻尼耦合系數(shù)的辨識(shí);文獻(xiàn)[14]利用參量激勵(lì)技術(shù)實(shí)現(xiàn)力耦合系數(shù)辨識(shí)。
盡管上述研究對(duì)微機(jī)械陀螺內(nèi)部的耦合誤差進(jìn)行了深入分析并提供耦合誤差系數(shù)的辨識(shí)方案,但大都簡(jiǎn)化了陀螺模型,只考慮了一部分誤差,限制了誤差系數(shù)的辨識(shí)精度。此外,多家機(jī)構(gòu)基于陀螺振動(dòng)的頻域特性,利用掃頻參數(shù)實(shí)現(xiàn)部分耦合誤差系數(shù)的辨識(shí),但對(duì)該方法的適用性缺乏研究,而這會(huì)在辨識(shí)過程中引入其他誤差,導(dǎo)致辨識(shí)結(jié)果缺乏可靠性。
本文針對(duì)微機(jī)械陀螺阻尼耦合誤差、剛度耦合誤差、力耦合誤差三種耦合誤差,提供了一種基于掃頻測(cè)試的微機(jī)械陀螺誤差系數(shù)辨識(shí)方案,并通過數(shù)值仿真的形式對(duì)此方案進(jìn)行詳細(xì)的驗(yàn)證說明,最后以嵌套環(huán)陀螺為平臺(tái)完成了辨識(shí)實(shí)驗(yàn)。通過誤差系數(shù)的辨識(shí),可分析以上三種耦合誤差的特性與主要影響因素,為誤差補(bǔ)償與抑制、陀螺零偏性能的提高、結(jié)構(gòu)優(yōu)化、工藝改進(jìn)提供指導(dǎo)。
1 微機(jī)械陀螺動(dòng)力學(xué)方程拓展及誤差模型
本文討論的微機(jī)械陀螺工作在調(diào)幅(Amplitude Modulation,AM)模式,驅(qū)動(dòng)模態(tài)為X 模態(tài),檢測(cè)模態(tài)為Y 模態(tài),通過解耦梁與中心質(zhì)量塊相連,其簡(jiǎn)化的動(dòng)力學(xué)模型如圖1 所示。
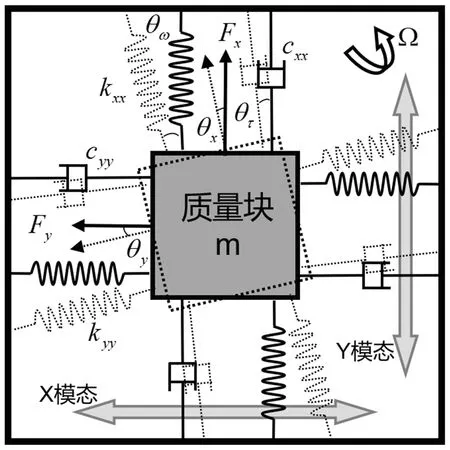
圖1 非理想微機(jī)械陀螺簡(jiǎn)化模型Fig.1 Simplified model of non-ideal MEMS gyroscope
理想狀態(tài)下動(dòng)力學(xué)方程可寫為:
其中,m為陀螺敏感結(jié)構(gòu)的質(zhì)量;x、y分別表示驅(qū)動(dòng)模態(tài)、檢測(cè)模態(tài)的位移;cxx、cyy分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的阻尼;kxx、kyy分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的剛度;Ω表示系統(tǒng)旋轉(zhuǎn)角速度;Fx、Fy分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)施加的激勵(lì)力,可表示為正弦信號(hào):
其中,F(xiàn)xd、Fyd分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)激勵(lì)力的幅值;ωd表示激勵(lì)力的頻率;φxy表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)激勵(lì)力之間的相位差。
對(duì)于實(shí)際的陀螺,在陀螺剛度梁、電極的微機(jī)械加工生產(chǎn)及裝配過程中,由于工藝誤差、應(yīng)力的存在,陀螺敏感結(jié)構(gòu)在幾何上不完全對(duì)稱,存在激勵(lì)電極不對(duì)準(zhǔn)、驅(qū)動(dòng)軸偏轉(zhuǎn)、檢測(cè)軸偏轉(zhuǎn)等耦合誤差因素[15,16]。
對(duì)于陀螺機(jī)械敏感結(jié)構(gòu)存在的耦合誤差,圖1 虛線部分展示了幾何不對(duì)稱下陀螺敏感結(jié)構(gòu)的模型,由于剛度軸偏轉(zhuǎn)角θω、阻尼軸偏轉(zhuǎn)角θτ、驅(qū)動(dòng)軸激勵(lì)電極偏轉(zhuǎn)角θx、檢測(cè)軸激勵(lì)電極偏轉(zhuǎn)角θy的存在,陀螺兩個(gè)模態(tài)之間存在剛度耦合、阻尼耦合以及兩個(gè)模態(tài)激勵(lì)電極偏轉(zhuǎn)角引起的力耦合。考慮以上誤差項(xiàng),對(duì)陀螺動(dòng)力學(xué)方程進(jìn)行擴(kuò)展,擴(kuò)展的動(dòng)力學(xué)方程可寫為[14]:
其中,cxy、cyx表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)之間的阻尼耦合系數(shù),與阻尼軸偏轉(zhuǎn)角θτ有關(guān);kxy、kyx表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)之間的剛度耦合系數(shù),與剛度軸偏轉(zhuǎn)角θω有關(guān),由于兩個(gè)模態(tài)的正交性,通常可認(rèn)為cxy=cyx,kxy=kyx;θx表示驅(qū)動(dòng)模態(tài)激勵(lì)電極偏轉(zhuǎn)角;θy表示檢測(cè)模態(tài)激勵(lì)電極偏轉(zhuǎn)角。
驅(qū)動(dòng)模態(tài)諧振狀態(tài)下由科里奧利力引起的科氏位移可表示為:
其中,xcol、ycol分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)由科里奧利力引起的科氏位移;ωy表示檢測(cè)模態(tài)諧振頻率,且分別表示檢測(cè)模態(tài)響應(yīng)的增益與相移;Qx、Qy分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的品質(zhì)因子;φx、φy分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)相位;Ax、Ay分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)位移幅值。
下面分別介紹三類耦合誤差主要產(chǎn)生機(jī)理及對(duì)陀螺輸出的影響。
1.1 阻尼耦合誤差
阻尼耦合誤差對(duì)應(yīng)于阻尼耦合系數(shù)cxy、cyx,主要來源于陀螺敏感結(jié)構(gòu)與襯底間的流體耦合與各向異性損耗[2]。
根據(jù)式(4),若存在阻尼耦合,陀螺敏感結(jié)構(gòu)的驅(qū)動(dòng)模態(tài)振動(dòng)會(huì)使檢測(cè)模態(tài)產(chǎn)生一個(gè)與驅(qū)動(dòng)模態(tài)振動(dòng)速度成正比的同頻阻尼耦合力,進(jìn)而引起檢測(cè)模態(tài)上的阻尼耦合振動(dòng)yc;同理,檢測(cè)模態(tài)振動(dòng)也會(huì)引起驅(qū)動(dòng)模態(tài)的阻尼耦合力,造成驅(qū)動(dòng)模態(tài)上的阻尼耦合振動(dòng)xc。諧振狀態(tài)下,有:
比較式(5)和式(6)可得,阻尼耦合誤差位移與科氏位移同頻且同相,難以通過信號(hào)處理的方式消除,直接影響了陀螺輸出。
1.2 剛度耦合誤差
剛度耦合誤差對(duì)應(yīng)于剛度耦合系數(shù)kxy、kyx,主要來源于因加工誤差、殘余應(yīng)力導(dǎo)致的剛度軸偏轉(zhuǎn)與彈性梁失衡,由剛度耦合引起的陀螺檢測(cè)模態(tài)位移輸出也稱為正交誤差[2-4]。
根據(jù)式(4),若存在剛度耦合,陀螺敏感結(jié)構(gòu)的驅(qū)動(dòng)模態(tài)振動(dòng)會(huì)導(dǎo)致檢測(cè)模態(tài)產(chǎn)生一個(gè)同頻剛度耦合力Fyk=-kyxx,該力與驅(qū)動(dòng)模態(tài)振動(dòng)位移成正比,引起檢測(cè)模態(tài)的剛度耦合振動(dòng)yk;同理,檢測(cè)模態(tài)振動(dòng)也會(huì)造成驅(qū)動(dòng)模態(tài)的剛度耦合力Fxk=-kxyy,造成驅(qū)動(dòng)模態(tài)上的阻尼耦合振動(dòng)xk。諧振狀態(tài)下,有:
比較式(5)和式(7)可得,剛度耦合誤差位移與科氏位移同頻,但相位正交。因此,可通過相干解調(diào)技術(shù)實(shí)現(xiàn)科氏位移同相信號(hào)與科氏位移正交信號(hào)的分離,在最佳解調(diào)相位下消除剛度誤差位移對(duì)陀螺輸出的影響,但由于電路相移、驅(qū)動(dòng)模態(tài)非受迫振動(dòng)、陀螺參數(shù)的溫度敏感性等非理想因素的限制,最佳解調(diào)相位難以完全對(duì)準(zhǔn)且非恒定,此時(shí)剛度耦合位移仍會(huì)影響陀螺輸出。
1.3 力耦合誤差
力耦合誤差對(duì)應(yīng)于激勵(lì)電極偏轉(zhuǎn)角θx、θy,主要來源于加工誤差、應(yīng)力影響、致動(dòng)過程造成的激勵(lì)電極之間的不對(duì)準(zhǔn)和不平衡[2,11]。對(duì)式(4)右邊整理得:
其中,λxy、λyx為力耦合系數(shù);Fxcos、Fycos分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的同軸激勵(lì)力。
根據(jù)式(4)可得,若驅(qū)動(dòng)模態(tài)存在激勵(lì)電極偏轉(zhuǎn)角,在驅(qū)動(dòng)激勵(lì)電極施加激勵(lì)信號(hào)時(shí),會(huì)在檢測(cè)模態(tài)產(chǎn)生激勵(lì)信號(hào)分量Ffxy=Fxsinθx,其大小與驅(qū)動(dòng)激勵(lì)信號(hào)成正比,進(jìn)而引起檢測(cè)模態(tài)上的力耦合振動(dòng)yf;同理,若檢測(cè)模態(tài)存在激勵(lì)電極偏轉(zhuǎn)角且施加激勵(lì)信號(hào)時(shí),會(huì)在驅(qū)動(dòng)模態(tài)產(chǎn)生激勵(lì)信號(hào)分量Ffyx=-Fysinθy,造成驅(qū)動(dòng)模態(tài)力耦合振動(dòng)xf。諧振狀態(tài)下,有:其中,φxy為檢測(cè)激勵(lì)信號(hào)與驅(qū)動(dòng)激勵(lì)信號(hào)之間的相位差。
比較式(5)和式(9)可得,力耦合誤差位移與科氏位移同頻,且存在同相分量與正交分量。由于諧振相位接近 -π/2,力耦合位移與科氏力同相的分量占主導(dǎo),直接影響了陀螺輸出,且難以通過信號(hào)處理手段消除。
2 基于掃頻的誤差系數(shù)辨識(shí)方法
2.1 理論推導(dǎo)
本文需要辨識(shí)的耦合誤差系數(shù)包括剛度耦合系數(shù)kxy=kyx、阻尼耦合系數(shù)cxy=cyx、驅(qū)動(dòng)模態(tài)到檢測(cè)模態(tài)的力耦合系數(shù)λyx和檢測(cè)模態(tài)到驅(qū)動(dòng)模態(tài)的力耦合系數(shù)λxy。
在陀螺AM 開環(huán)工作模式下,檢測(cè)模態(tài)不加力,將動(dòng)力學(xué)方程簡(jiǎn)化,阻尼系數(shù)與剛度系數(shù)用陀螺品質(zhì)因子、諧振頻率表示,對(duì)式(4)整理得:
其中,系數(shù)η=cxy/m=cyx/m,α=kxy/m=kyx/m。
為了得到角速度輸出,需要在后端電路上對(duì)兩個(gè)模態(tài)的位移輸出進(jìn)行采樣、濾波等數(shù)據(jù)處理,采樣后的驅(qū)動(dòng)模態(tài)、檢測(cè)模態(tài)位移信號(hào)可以視為離散時(shí)間序列x[t]、y[t],根據(jù)離散傅里葉變換:
將式(11)代入式(10)后化簡(jiǎn)得到:
在系統(tǒng)無外界角速度輸入的情況下,可解得驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)振動(dòng)位移信號(hào)的離散時(shí)間傅里葉變換。
其中,
將式(13)中的兩式相除,并忽略兩個(gè)系數(shù)相乘的小量,化簡(jiǎn)得到:
取式(15)的實(shí)部,用掃頻設(shè)定的頻率ωn換kn得到:
其中,S(ωn)是通過掃頻測(cè)試得到的驅(qū)動(dòng)模態(tài)和檢測(cè)模態(tài)的幅頻、相頻數(shù)據(jù)計(jì)算得出,具體步驟見3.3 節(jié);a(ωn)、b(ωn)、c(ωn)由掃頻得到的陀螺品質(zhì)因子和諧振頻率確定。
式(16)用矩陣整理,令:
則Y=XP。誤差系數(shù)估計(jì)值為:
同理,在陀螺驅(qū)動(dòng)模態(tài)不加力、檢測(cè)模態(tài)加力的情況下,可以實(shí)現(xiàn)對(duì)檢測(cè)模態(tài)到驅(qū)動(dòng)模態(tài)的力耦合系數(shù)λxy的辨識(shí),本文不再說明。文中提到的力耦合系數(shù)均指驅(qū)動(dòng)模態(tài)到檢測(cè)模態(tài)的力耦合系數(shù)λyx。
2.2 誤差系數(shù)辨識(shí)精度影響因素?cái)?shù)值仿真分析
基于上述耦合誤差系數(shù)辨識(shí)的理論推導(dǎo)過程,可以看到,耦合誤差系數(shù)的辨識(shí)精度受到陀螺本身結(jié)構(gòu)參數(shù)、幅值測(cè)量誤差、相位測(cè)量誤差的影響。由于各種影響因素互相耦合,因此采用數(shù)值仿真方式對(duì)此方法辨識(shí)的耦合誤差系數(shù)效果進(jìn)行分析,得出此方法的適用性,并給出辨識(shí)結(jié)果有效與否的判斷依據(jù)。
微機(jī)械陀螺的結(jié)構(gòu)參數(shù)設(shè)置如表1 所示。

表1 微機(jī)械陀螺結(jié)構(gòu)參數(shù)Tab.1 Structural parameters of MEMS gyroscope
仿真流程示意圖如圖2 所示。

圖2 仿真流程示意圖Fig.2 Simulation process diagram
根據(jù)耦合誤差系數(shù)設(shè)置確定微機(jī)械陀螺拓展的動(dòng)力學(xué)方程,結(jié)合陀螺結(jié)構(gòu)參數(shù)與掃頻輸入?yún)?shù)可以解得陀螺驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)位移信號(hào)。在一定測(cè)量誤差下,根據(jù)驅(qū)動(dòng)模態(tài)、檢測(cè)模態(tài)的振動(dòng)幅值與相位對(duì)耦合誤差系數(shù)進(jìn)行辨識(shí),并與設(shè)置值進(jìn)行比較,研究此方法對(duì)于力耦合系數(shù)、阻尼耦合系數(shù)和剛度耦合系數(shù)的辨識(shí)準(zhǔn)確度,用理論相對(duì)誤差 ΔRerr(i)表示:
其中,Rids(1)、Rids(2)、Rids(3)分別表示仿真辨識(shí)的力耦合系數(shù)、阻尼耦合系數(shù)和剛度耦合系數(shù);Rset(1)、Rset(2)、Rset(3)分別表示設(shè)置的力耦合系數(shù)、阻尼耦合系數(shù)和剛度耦合系數(shù)。
2.2.1 不同耦合誤差系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差
根據(jù)微機(jī)械陀螺動(dòng)力學(xué)方程,不同的耦合誤差系數(shù)大小會(huì)對(duì)陀螺的振動(dòng)造成不同的影響。為更好地表示耦合誤差系數(shù)與陀螺主要結(jié)構(gòu)參數(shù)之間的關(guān)系,定義耦合誤差比例系數(shù)。其中,阻尼耦合誤差比例系數(shù)k1=mη/cxx;剛度耦合誤差比例系數(shù)k2=mα/kxx,k1、k2與力耦合系數(shù)λyx的取值范圍均在-1~1 之間。因此,耦合誤差系數(shù)可以表示為:
由于耦合誤差比例系數(shù)的符號(hào)不影響最終辨識(shí)精度,因此將不同的耦合誤差比例系數(shù)設(shè)置在0~1 之間,對(duì)采用此方法辨識(shí)的耦合誤差系數(shù)理論相對(duì)誤差進(jìn)行仿真分析,結(jié)果如圖3 所示。由圖3 可知:隨著力耦合系數(shù)的增大,阻尼耦合系數(shù)與剛度耦合系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差會(huì)隨之增大,而力耦合系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差則先減小后增大;阻尼耦合系數(shù)的大小對(duì)力耦合系數(shù)和剛度耦合系數(shù)的辨識(shí)影響不大,但與阻尼耦合系數(shù)本身辨識(shí)結(jié)果的理論相對(duì)誤差呈反相關(guān)趨勢(shì);隨著剛度耦合系數(shù)的增大,三種耦合系數(shù)的辨識(shí)的理論相對(duì)誤差均呈上升趨勢(shì)。若取2%為耦合誤差辨識(shí)結(jié)果有效性的判斷依據(jù),可以發(fā)現(xiàn),使用該方法辨識(shí)耦合誤差系數(shù)時(shí),阻尼耦合系數(shù)的辨識(shí)存在巨大的誤差,因此需對(duì)辨識(shí)結(jié)果進(jìn)行可靠性的校驗(yàn)。

圖3 不同耦合誤差比例系數(shù)下辨識(shí)結(jié)果的理論相對(duì)誤差Fig.3 Theoretical relative error of identification results under different coupling error proportional coefficients
2.2.2 幅值和相位測(cè)量誤差對(duì)辨識(shí)結(jié)果的影響
根據(jù)此方法論述的耦合誤差辨識(shí)模型,實(shí)際測(cè)試中的幅值和相位誤差直接關(guān)系到耦合誤差系數(shù)辨識(shí)的精度。為探究幅值和相位測(cè)量誤差與耦合誤差系數(shù)辨識(shí)精度的關(guān)系,在現(xiàn)有測(cè)試條件下驗(yàn)證此方法的可行性,并進(jìn)行仿真分析。
對(duì)于測(cè)量過程中的幅值測(cè)量噪聲,用幅值噪聲峰峰值NA衡量,表示對(duì)同一幅值信號(hào)采樣過程中最高值與最低值的差值。幅值越大,幅值誤差也越大。因此,對(duì)包含噪聲的幅值采樣結(jié)果,本文將其表示為:
其中,R(ω)為-1~1 之間的隨機(jī)函數(shù),Ax(ω)、Ay(ω)分別表示含噪聲的驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)位移幅值數(shù)字量分別表示不含噪聲的驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)位移幅值數(shù)字量。
對(duì)于測(cè)量過程中的相位誤差,包含相位偏移不對(duì)稱度ΔΨ與相位測(cè)量噪聲。其中,相位偏移不對(duì)稱度指的是驅(qū)動(dòng)模態(tài)相位測(cè)量誤差與檢測(cè)模態(tài)相位測(cè)量誤差的差值;相位測(cè)量噪聲用相位噪聲峰峰值Nφ衡量,表示對(duì)同一相位信號(hào)采樣過程中最高值與最低值的差值。因此,對(duì)包含測(cè)量誤差的相位采樣結(jié)果,本文將其表示為:
其中,ΔΨ1與ΔΨ2分別表示驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的相位測(cè)量偏移,且分別表示含噪聲與偏移的驅(qū)動(dòng)模態(tài)和檢測(cè)模態(tài)的振動(dòng)相位;分別表示不含噪聲與偏移的驅(qū)動(dòng)模態(tài)和檢測(cè)模態(tài)的振動(dòng)相位。
仿真結(jié)果如圖4-圖6 所示。

圖4 幅值噪聲峰峰值對(duì)耦合誤差系數(shù)辨識(shí)影響Fig.4 The influence of amplitude noise peak to peak on the identification of coupling error coefficients

圖5 相位噪聲峰峰值對(duì)耦合誤差系數(shù)辨識(shí)影響Fig.5 The impact of phase noise peak to peak on the identification of coupling error coefficients
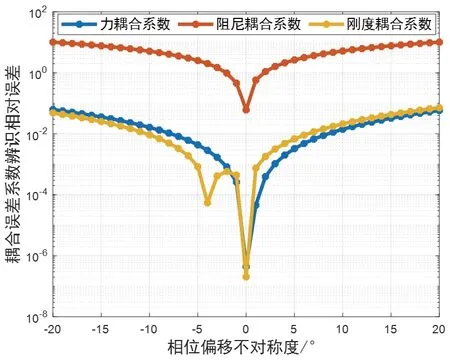
圖6 相位偏移不對(duì)稱度對(duì)耦合誤差系數(shù)辨識(shí)影響Fig.6 The impact of phase offset asymmetry on the identification of coupling error coefficients
由圖4-圖6 可以看出:幅值噪聲峰峰值對(duì)耦合誤差系數(shù)辨識(shí)準(zhǔn)確度的影響不大;隨著相位噪聲與相位偏移不對(duì)稱度的增大,耦合誤差系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差均顯著上升,但剛度耦合系數(shù)與力耦合系數(shù)的辨識(shí)結(jié)果在多數(shù)情況下仍處在可接受范圍內(nèi)。此外,阻尼耦合系數(shù)的辨識(shí)結(jié)果對(duì)幅值、相位的測(cè)量誤差十分敏感,在較大的測(cè)量誤差下難以有效辨識(shí)。
3 基于掃頻測(cè)試的誤差系數(shù)辨識(shí)實(shí)驗(yàn)測(cè)試
以嵌套環(huán)陀螺為例進(jìn)行測(cè)試,驗(yàn)證本文的微機(jī)械陀螺耦合誤差辨識(shí)方法,并給出精度分析。測(cè)試平臺(tái)實(shí)物圖如圖7 所示,包括模擬板與數(shù)字板,通過串口接收控制指令并輸出測(cè)試數(shù)據(jù)。實(shí)驗(yàn)所用的陀螺與控制環(huán)路如圖8 所示。由FPGA 生成驅(qū)動(dòng)力與載波信號(hào),并對(duì)驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的振動(dòng)信號(hào)進(jìn)行信號(hào)處理,最終通過串口輸出:驅(qū)動(dòng)模態(tài)振動(dòng)幅值、驅(qū)動(dòng)模態(tài)振動(dòng)相位、檢測(cè)模態(tài)振動(dòng)幅值、檢測(cè)模態(tài)振動(dòng)相位和掃頻頻率。

圖7 測(cè)試平臺(tái)實(shí)物圖Fig.7 Actual diagram of the test platform

圖8 微機(jī)械陀螺控制環(huán)路Fig.8 The control loop of MEMS gyroscopes
3.1 陀螺模態(tài)參數(shù)掃頻辨識(shí)
圖9 給出陀螺驅(qū)動(dòng)模態(tài)和檢測(cè)模態(tài)的掃頻測(cè)試曲線,根據(jù)曲線的峰值與半功率點(diǎn)可求出驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的諧振頻率與品質(zhì)因子,結(jié)果見表2。

表2 模態(tài)參數(shù)辨識(shí)Tab.2 Modal parameter identification

圖9 掃頻檢測(cè)結(jié)果Fig.9 The results of swept-frequency measurement
根據(jù)模態(tài)參數(shù)辨識(shí)結(jié)果,可獲得式(17)中的X矩陣。
3.2 幅值和相位修正
在實(shí)際陀螺中,驅(qū)動(dòng)模態(tài)振動(dòng)信號(hào)Axa與檢測(cè)模態(tài)振動(dòng)信號(hào)Aya經(jīng)過電容-電壓(Capacitance-Voltage,CV)測(cè)量模塊轉(zhuǎn)換為電壓信號(hào),再由ADC 模塊轉(zhuǎn)化為數(shù)字信號(hào)Axd、Ayd,解調(diào)后得出驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)各個(gè)頻率對(duì)應(yīng)的幅值與相位信息。然而受加工誤差、電路元器件等因素影響,檢測(cè)到的位移數(shù)字量、相位與實(shí)際值相比存在偏差,因此需要進(jìn)行幅值和相位修正。
對(duì)于驅(qū)動(dòng)模態(tài),振動(dòng)位移可寫為
其中,SFx為驅(qū)動(dòng)模態(tài)實(shí)際位移到位移數(shù)字量的轉(zhuǎn)換系數(shù);SFAV_x為驅(qū)動(dòng)模態(tài)激勵(lì)電壓數(shù)字量Vxd到驅(qū)動(dòng)力Fxa的轉(zhuǎn)換系數(shù)。
同理對(duì)于檢測(cè)模態(tài),可以得到:
其中,SFy為檢測(cè)模態(tài)實(shí)際位移到振動(dòng)位移數(shù)字量的轉(zhuǎn)換系數(shù);SFAV_y為檢測(cè)模態(tài)激勵(lì)電壓數(shù)字量到驅(qū)動(dòng)力的轉(zhuǎn)換系數(shù);Vyd為檢測(cè)模態(tài)激勵(lì)電壓數(shù)字量。
給兩個(gè)模態(tài)施加同樣大小的激勵(lì)電壓數(shù)字量,即Vyd=Vxd=Vd,考慮SFAV_x=SFAV_y,則此時(shí)兩模態(tài)實(shí)際位移到位移數(shù)字量的轉(zhuǎn)換系數(shù)比kSF為:
測(cè)試數(shù)據(jù)及結(jié)果如表3 所示。

表3 轉(zhuǎn)換系數(shù)比辨識(shí)Tab.3 Conversion coefficient ratio identification
由于相位偏移不對(duì)稱度對(duì)阻尼耦合系數(shù)的辨識(shí)有極大的影響,而元器件、FPGA 內(nèi)部的相位延遲難以測(cè)量,因此在相位修正時(shí),本文將理論諧振相位與實(shí)際諧振相位的差值作為相位補(bǔ)償量。理論上,陀螺在諧振狀態(tài)時(shí)諧振相位為-90 °,記實(shí)驗(yàn)測(cè)得的驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)相位信號(hào)分別為φxg(ω)、φyg(ω),則補(bǔ)償后的驅(qū)動(dòng)模態(tài)相位信號(hào)為:
補(bǔ)償后檢測(cè)模態(tài)相位信號(hào)為:
考慮到幅值和相位測(cè)量誤差對(duì)辨識(shí)結(jié)果的影響,由于驅(qū)動(dòng)模態(tài)和檢測(cè)模態(tài)的電容檢測(cè)電路相同,在8014.3 Hz 驅(qū)動(dòng)力頻率下驅(qū)動(dòng)陀螺,得到不同采樣時(shí)刻下驅(qū)動(dòng)模態(tài)振動(dòng)幅值數(shù)字量Ax(t)與振動(dòng)相位φx(t)如圖10 所示。因此,幅值噪聲峰峰值NA與相位噪聲峰峰值Nφ可表示為:

圖10 驅(qū)動(dòng)模態(tài)幅值與相位原始信號(hào)Fig.10 Raw amplitude and phase signal of drive mode
根據(jù)圖4 和圖5,阻尼耦合系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差大于1000%,因此需對(duì)原始信號(hào)進(jìn)行低通濾波處理,處理后的結(jié)果如圖11所示。此時(shí)阻尼耦合系數(shù)辨識(shí)結(jié)果的理論相對(duì)誤差約為9%。

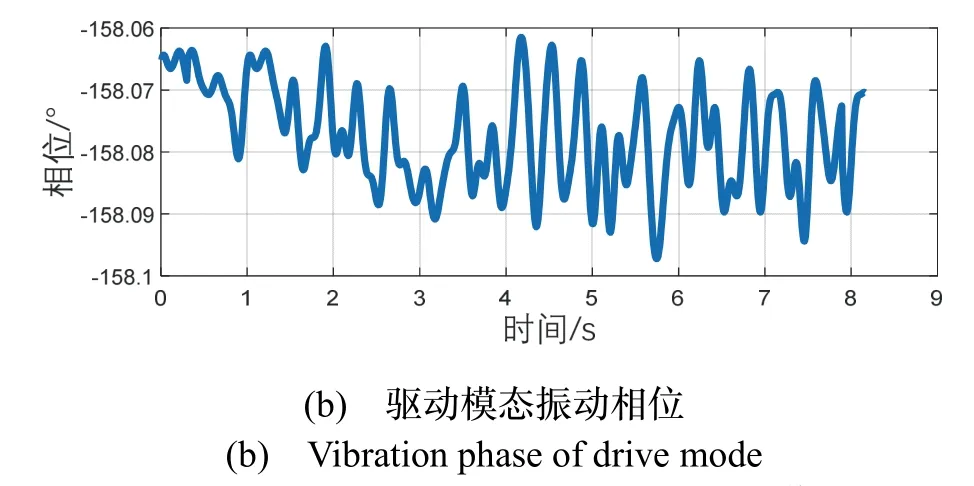
圖11 驅(qū)動(dòng)模態(tài)幅值與相位低通濾波后信號(hào)Fig.11 Amplitude and phase signal after low-pass filtering of drive mode
3.3 耦合誤差系數(shù)辨識(shí)及可靠性衡量
在陀螺驅(qū)動(dòng)模態(tài)施加掃頻激勵(lì)信號(hào),檢測(cè)模態(tài)不加力,獲得驅(qū)動(dòng)模態(tài)與檢測(cè)模態(tài)的幅頻、相頻信息并進(jìn)行低通濾波處理,進(jìn)一步獲得式(16)中Y(ωn)與X(ωn)。其中,對(duì)于驅(qū)動(dòng)模態(tài),記測(cè)得的幅值信號(hào)為Ax(ω),補(bǔ)償后的相位信號(hào)為φx(ω),則驅(qū)動(dòng)模態(tài)頻域信息可表示為X(ω) =Ax(ω) cos(φx(ω)) +i ?Ax(ω) sin(φx(ω));對(duì) 于檢測(cè)模態(tài),記測(cè)得的幅值信號(hào)為Ay(ω),補(bǔ)償后相位信號(hào)為φy(ω),考慮到實(shí)際位移到位移數(shù)字量的轉(zhuǎn)換系數(shù),可以將檢測(cè)模態(tài)的頻域信息表示為
辨識(shí)結(jié)果如表4 所示。

表4 耦合誤差系數(shù)辨識(shí)結(jié)果Tab.4 Identification results of coupling error coefficients
將辨識(shí)出來的耦合誤差系數(shù)代入式(10),得到擬合的掃頻曲線,與實(shí)測(cè)掃頻曲線的對(duì)比如圖12 所示。

圖12 實(shí)測(cè)數(shù)據(jù)與擬合數(shù)據(jù)對(duì)比Fig.12 Comparison between measured data and fitted data
運(yùn)用曲線回歸擬合優(yōu)度RNL進(jìn)行分析。若用ymea[ωi]表示實(shí)測(cè)量,yfit[ωi]表示擬合量,則擬合優(yōu)度RNL的計(jì)算公式為:
式(29)將 {ymea[ωi]}與 {yfit[ωi]}視為N維空間的點(diǎn),利用兩點(diǎn)之間的距離表示擬合的精度。若距離越小,則RNL值越大,擬合精度越高,耦合誤差系數(shù)辨識(shí)的精度也越高。計(jì)算圖12 中各擬合曲線的擬合優(yōu)度,結(jié)果如表5 所示,可見整體擬合精度非常高。

表5 各曲線擬合優(yōu)度Tab.5 Goodness of fit of each curve
進(jìn)一步考慮2.2.1 節(jié)分析,將表2-表4 的測(cè)試結(jié)果代入式(10)-式(18),在表4 辨識(shí)結(jié)果下計(jì)算耦合誤差辨識(shí)結(jié)果的理論相對(duì)誤差,結(jié)果如表6 所示。

表6 當(dāng)前參數(shù)下耦合誤差系數(shù)辨識(shí)結(jié)果理論相對(duì)誤差Tab.6 Theoretical relative error of coupling error coefficient identification results under current parameters
4 結(jié)論
本文針對(duì)微機(jī)械陀螺中耦合誤差,分析了剛度耦合、阻尼耦合、力耦合對(duì)陀螺輸出的影響,提出了一種僅根據(jù)掃頻檢測(cè)數(shù)據(jù)即可實(shí)現(xiàn)的耦合誤差系數(shù)辨識(shí)方案,實(shí)現(xiàn)了對(duì)剛度耦合系數(shù)、阻尼耦合系數(shù)和力耦合系數(shù)的辨識(shí),并對(duì)該方法的辨識(shí)準(zhǔn)確度進(jìn)行分析,給出擬合優(yōu)度與理論相對(duì)誤差兩種衡量指標(biāo)。結(jié)果表明:不同陀螺的結(jié)構(gòu)參數(shù)、幅值測(cè)量誤差、相位測(cè)量誤差均影響辨識(shí)準(zhǔn)確度;三類誤差系數(shù)中,阻尼耦合系數(shù)的辨識(shí)準(zhǔn)確度最低,且極易受相位測(cè)量誤差的影響;對(duì)幅值、相位測(cè)量結(jié)果進(jìn)行低通濾波能有效提高辨識(shí)結(jié)果的準(zhǔn)確度。實(shí)驗(yàn)結(jié)果為:該陀螺力耦合系數(shù)、阻尼耦合系數(shù)、剛度耦合系數(shù)分別為-0.000374、-6.96×10-8N·s/m、0.103 N/m;理論相對(duì)誤差分別為0.542 ppm、6.09%、0.205 ppm;辨識(shí)曲線的擬合優(yōu)度為0.99。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44