智能牽引供電系統接觸網狀態監測技術及應用
2024-03-16 06:10:04王雙雙
電氣化鐵道 2024年1期
王雙雙
0 引言
牽引供電系統為電力機車提供動力,接觸網作為牽引供電系統中的重要一環,承擔著輸送電力的重要任務,發生嚴重缺陷時會導致接觸網斷線等重大事故,危及列車運行安全[1]。張力補償裝置位于接觸網錨段兩端,用于補償接觸線和承力索的張力變化,使張力保持恒定[2]。受溫度影響,不同時刻不同溫度下接觸網線索會出現松弛和拉伸,引起補償裝置的位置變化,導致補償裝置位置超出安全工作范圍,影響接觸網正常工作。如何通過智能化技術對接觸網狀態進行監測,是當前研究的重要課題。諸多研究者們對接觸網狀態監測進行研究,文獻[3]研究通過安裝大量的傳感器實現對接觸網的實時監測;文獻[4]從自然原因和人為原因分析了接觸網斷線的原因,提出了預防接觸網斷線的方法;文獻[5]提出一種防斷線預警指示器實現對接觸網斷線的監測,但因接觸網線路較長,加裝硬件設備會大幅增加設備維護成本。
針對接觸網斷線監測的現狀及面臨的問題,本文提出一種接觸網斷線監測系統,采用安裝在車體上的線陣相機對不同錨段位置的補償裝置進行監測,基于目標檢測算法[6]對補償裝置進行定位,結合中值濾波[7]等圖像處理算法對區域進行處理,并利用邊緣檢測[8]、連通域提取算法對補償裝置的輪廓進行提取,確定補償裝置位置信息,使用閾值分割與形態學濾波對補償裝置底部關鍵信息進行提取[9],獲得像素對應的實際位移信息;通過判斷補償裝置位置能夠快速確定接觸網是否異常,為接觸網線路的檢修提供可靠依據。
1 檢測設備及方法
為使接觸線具有必要的張力,接觸網每隔一定長度設置一個錨段,通過補償裝置對接觸網進行張力補償,如圖1 所示。

圖1 接觸網張力補償裝置
線路上的補償裝置通常成對出現[10],分別對接觸線、承力索進行補償。通過接觸網結構可知,靠近支柱一側的為承力索補償裝置,遠離支柱的為接觸線補償裝置。
1.1 補償裝置檢測方法
補償裝置檢測主要包括兩部分,即數據處理和補償裝置定位。采用半監督學習的深度學習目標檢測算法[11]對補償裝置進行定位,具體流程如圖2所示。

圖2 補償裝置檢測方法流程
如圖2 所示,補償裝置檢測的主要流程如下:
(1)通過線陣相機采集補償裝置圖像,補償裝置位于錨段兩側,接觸線和承力索的補償裝置出現在兩張圖像中;
(2)對補償裝置圖像進行人工標注,需要標注補償裝置、支柱和抱箍;
(3)使用目標檢測模型對補償裝置進行定位,將標注的數據進行訓練,當模型收斂后,停止訓練;
(4)確定模型是否滿足定位精度要求,劃分部分未參與訓練的數據集進行測試,驗證模型是否滿足使用精度要求;
(5)當模型滿足使用精度要求時,使用定位模型完成對補償裝置的定位。
1.2 接觸網異常監測判斷方法
接觸網異常監測判斷主要通過判斷補償裝置是否超過安全距離范圍;補償裝置超出安全距離范圍表明接觸網存在危險或已經出現斷線情況。
根據支柱位置信息,確定接觸線和承力索對應的補償裝置位置信息,輸出對應的補償值。主要步驟包括:
(1)提取支柱,目的是確認是接觸線補償裝置還是承力索補償裝置。根據模型識別結果,以支柱位置獲得補償裝置位置信息,通過提取支柱的最大連通區域[12],使用形態學濾波[13]完成對支柱的提取。
(2)確定補償裝置對應關系。在圖3 中,根據接觸網的安裝結構,靠近支柱一側為承力索補償裝置,遠離支柱一側為接觸線補償裝置。
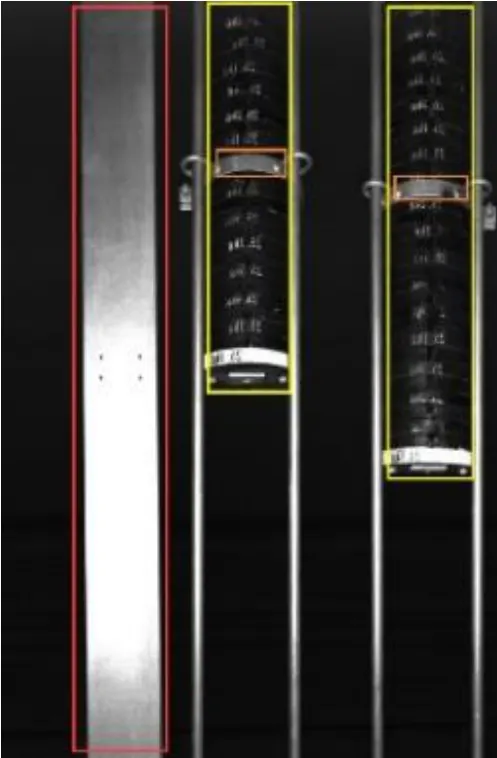
圖3 關鍵部件定位
(3)提取補償裝置最低點。補償裝置最低點位置可用于計算地面到最低點的距離,通過該距離值可以判斷出補償裝置是否正常工作。提取最低點主要通過定位模型定位得到的補償裝置區域,提取補償裝置底部關鍵信息,計算兩個補償裝置的最低點,如圖4 所示。
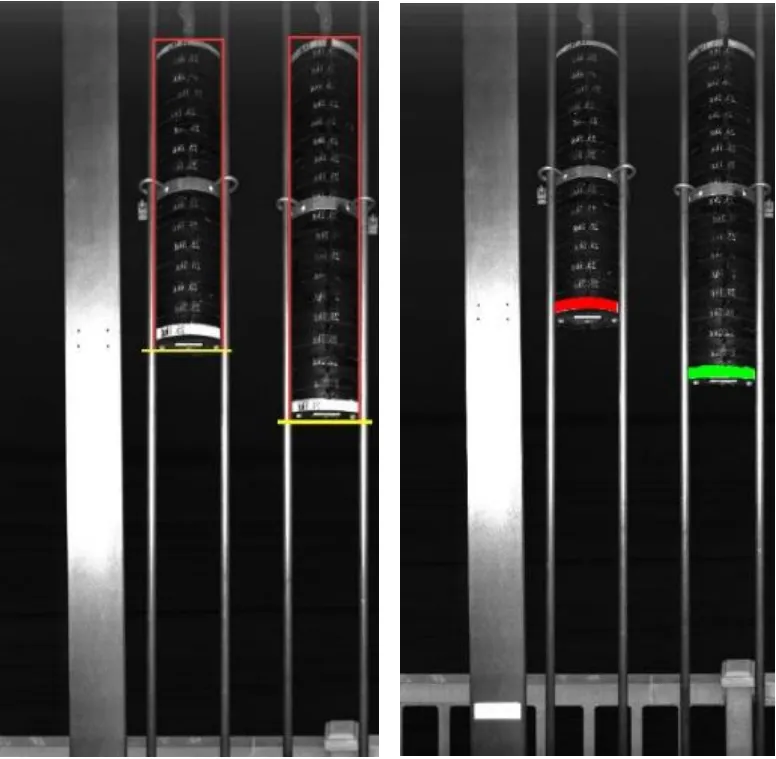
圖4 補償裝置最低點提取
通過定位模型定位補償裝置后,其最底部區域由于相機畸變和拍攝角度等問題,導致拍攝得到的補償裝置底部最低點提取不準確。本文采用閾值分割和形態學濾波算法,完成對補償裝置底部信息的提取,獲取底部區域最低點的坐標信息p(x,y)。
(4)抱箍定位與物理距離計算。在提取到補償裝置的底部最低點后,需要將圖像坐標信息轉換到世界坐標系下,獲取實際補償裝置最低點到地面的實際距離,主要步驟:
a.抱箍定位和寬度提取。通過定位模型定位抱箍,從而可測得抱箍的實際寬度(圖5)。
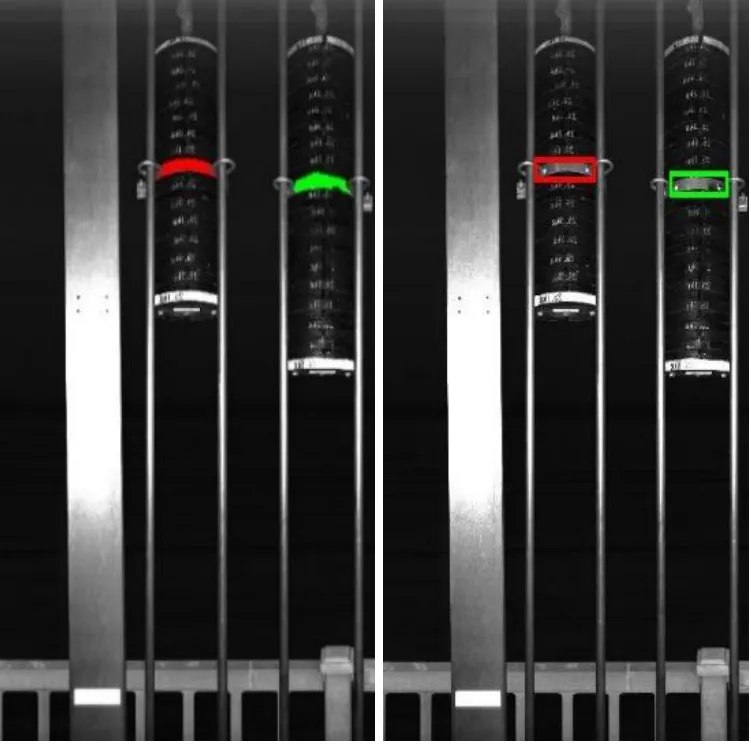
圖5 形態學操作提取抱箍
b.坐標轉換。通過提取抱箍的寬度,完成圖像坐標與世界坐標的轉換;采用閾值分割[14]、形態學操作提取抱箍區域,并提取抱箍的最小外接矩形[15],獲得抱箍的像素寬度,通過像素寬度和抱箍實際寬度,獲得世界坐標系下的距離轉換關系s:
式中:wn為抱箍實際寬度;wp為抱箍的像素寬度。
(5)補償值計算。通常情況下,支柱底部存在大量的雜草等干擾,影響最終的計算結果。因此通過在支柱底部添加標志或尋找參照物,將該標志記作底部關鍵特征點,該關鍵特征點到地面為一個定值,再通過計算補償裝置底部到該標志的距離,可以提高計算精度。
如圖6 所示,圖像中存在欄桿,該欄桿到地面高度固定,可將該欄桿的高度值作為地面距離關鍵特征點的距離,在其他情況下,可以選擇在支柱底部張貼反光條,在保證相機能夠正常成像該反光條的情況下,可以將該反光條作為底部關鍵特征點。反光條的寬度可根據實際情況設定,該寬度值用于矯正抱箍在相機成像時的畸變情況。
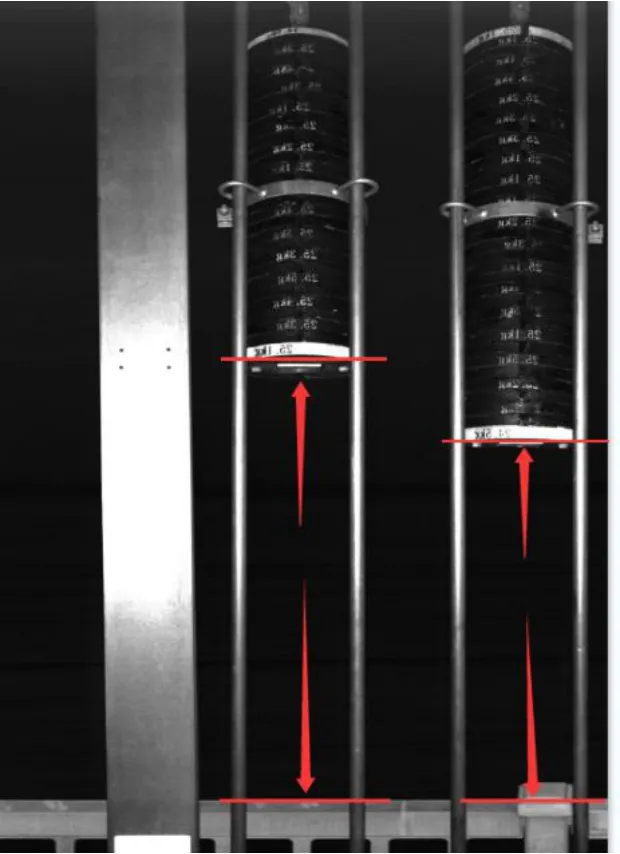
圖6 補償裝置最低點到底部區域范圍
通過提取補償裝置最低點到標志參考點的距離位置信息,提高了補償值的計算精度。考慮到在線陣相機在拍攝過程中由于安裝角度和觸發問題導致拍攝的補償裝置區域不完整,因此,底部實際距離無法直接獲得。通過測量補償裝置底部到相機拍攝底部關鍵特征點的距離mi,再加上關鍵區域到地面的距離(為一個定值d),即可求得補償裝置到地面的距離。
通過輸出的補償值,設置安全閾值范圍,判斷補償值b是否在安全范圍內,如式(2)、式(3)所示。
式中:i∈{1, 2}為承力索或接觸線;bi為對應的補償值;pi為最低點縱坐標;mi為底部區域參考點;s為像素與實際物理距離的對應關系,可由式(1)求得;d為參考點到地面的距離;t為安全閾值。
2 接觸網斷線智能監測系統
基于上述接觸網異常監測方法,研發了接觸網斷線智能檢測系統,通過對異常狀態進行實時監測和顯示,以圖形化、表格化生成報表。監測系統結構如圖7 所示。

圖7 接觸網斷線智能監測系統
接觸網斷線智能監測系統主要功能包括相機采集的補償裝置圖像界面展示、智能硬件、監控預警、斷線預警和實時監測模塊。
(1)界面展示:記錄不同時刻的補償值,并通過曲線進行展示。
(2)智能硬件:連接溫濕度傳感器,根據接觸線、承力索的熱脹冷縮特性,傳感器的值應與計算的補償值具有變化趨勢的一致性。
(3)監控預警:對線路上的缺陷進行預警,并給出預警的實時畫面。
(4)斷線預警:接觸網斷線是嚴重的事故,系統中對接觸網斷線進行了單獨顯示并給出預警信息。
(5)實時監測:連接相機實時畫面,對每一幀圖像數據進行顯示,判斷接觸網是否斷線。
接觸網斷線智能監測系統主界面如圖8 所示,可通過該系統完成對補償裝置補償值的記錄,并將不同時刻的補償值進行統計,形成報表和曲線,實現接觸網的斷線預警。

圖8 接觸網斷線智能監測系統主界面
3 結語
通過對智能牽引供電系統中的接觸網狀態進行監測,特別是對接觸網斷線問題進行研究和探討,結合深度學習理論和圖像處理算法設計了接觸網斷線智能監測系統。該方法快速準確,后期設備維護成本小,可將該方案進一步拓展接觸網張力補償裝置異常監測,對補償裝置的補償繩進行斷散股的缺陷判斷,為智能化牽引供電系統提供更全面、準確的技術支持。
