基于擴張狀態(tài)觀測器的快速反射鏡滑模控制
2024-02-29 14:38:06緱澤恩韓順杰李雙成
紅外技術(shù) 2024年2期
關(guān)鍵詞:系統(tǒng)
緱澤恩,韓順杰,李雙成,粟 華
(1.長春工業(yè)大學(xué) 電氣與電子工程學(xué)院,吉林 長春 130012;2.長春奧普光電技術(shù)股份有限公司,吉林 長春 130033)
0 引言
快速反射鏡(fast steering mirror,F(xiàn)SM)是一種用于精確定位和控制光束方向的光學(xué)元件。它由一個反射面和一個驅(qū)動系統(tǒng)組成,通過驅(qū)動系統(tǒng)的精確調(diào)節(jié),實現(xiàn)對光束的快速偏轉(zhuǎn)和穩(wěn)定定位。快速反射鏡具有體積小、功耗低、響應(yīng)速度快和高精度控制等優(yōu)勢[1],廣泛應(yīng)用在各類航空相機中,能夠補償振動和運動引起的像移和模糊,提高成像質(zhì)量和系統(tǒng)性能。此外,在天文望遠鏡、激光通信、自適應(yīng)光學(xué)系統(tǒng)、光學(xué)雷達和光電穩(wěn)定跟蹤等領(lǐng)域,快速反射鏡也發(fā)揮著獨特而不可替代的作用[2]。與傳統(tǒng)的跟蹤儀器相比,快速反射鏡具有較高的諧振頻率和較小的慣性,可實現(xiàn)更高的角分辨率,并顯著提升系統(tǒng)的帶寬和響應(yīng)速度[3]。為滿足快速反射鏡系統(tǒng)跟蹤目標(biāo)時,跟蹤速度的快速性和抗干擾的能力,需要采用一種恰當(dāng)?shù)目刂扑惴ā1壤?積分-微分(PID)控制作為一種經(jīng)典的線性控制方法,結(jié)構(gòu)簡單,參數(shù)整定容易,早期應(yīng)用于快速反射鏡系統(tǒng)中[4]。但PID 控制所能達到的跟蹤精度、響應(yīng)速度和抗干擾能力還有待提升。為提高快速反射鏡系統(tǒng)的適應(yīng)性,研究人員將自適應(yīng)算法[5-6]應(yīng)用于FSM 系統(tǒng)之中。文獻[7]結(jié)合經(jīng)典PID 控制和自適應(yīng)前饋控制兩種算法的優(yōu)點,同時結(jié)合解耦理論,提出了一種解耦的復(fù)合控制算法,有效抑制光束抖動并增強了系統(tǒng)的控制精度。文獻[8]通過引入模糊設(shè)計思想,在經(jīng)典PID 控制器的基礎(chǔ)上,設(shè)計了模糊自適應(yīng)PID 控制器,跟蹤能力進一步提高。自抗擾控制是韓京清教授[9]提出的一種非線性控制理論,而擴張狀態(tài)觀測器是自抗擾控制技術(shù)的核心組成部分,是一種主動抗擾動控制方法。它直接將系統(tǒng)內(nèi)外的未知擾動視為總擾動,并通過系統(tǒng)的輸入輸出對其進行估計和補償,從而抵消擾動,達到抗擾動的目的。
本文基于快速控制反射鏡數(shù)學(xué)模型,考慮到外界擾動未知的條件下,提出了一種改進的滑模控制(sliding mode control,SMC)方法并構(gòu)造了一個擴張狀態(tài)觀測器(extended state observer,ESO)觀測系統(tǒng)受到的外界總擾動,簡稱SMC+ESO 方法。SMC+ESO方法不僅可以獲得更好的動態(tài)性能和穩(wěn)態(tài)性能,而且可以解決傳統(tǒng)滑模控制器存在的抖振問題,減小了抖振,仿真結(jié)果驗證了該方法的有效性。
1 快速反射鏡系統(tǒng)的數(shù)學(xué)模型
目前主流的快速調(diào)節(jié)角度的驅(qū)動器分別是音圈電機和壓電陶瓷[10],二者被廣泛應(yīng)用于快速反射鏡系統(tǒng)。壓電陶瓷通過“逆壓電效應(yīng)”實現(xiàn)機械能和電能互相轉(zhuǎn)換,它具有轉(zhuǎn)動慣量小、重量輕、噪聲小、發(fā)熱少且無雜散電磁場等優(yōu)點,但存在遲滯和蠕變等非線性特性,對系統(tǒng)跟蹤精度造成影響。音圈電機(voice coil actuator,VCA)是一種特殊形式的直線驅(qū)動電機,相比于壓電陶瓷驅(qū)動器,它的結(jié)構(gòu)簡單、響應(yīng)頻率低、無滯后、體積小,具有更大的運動行程,而且對振動、沖擊等工作環(huán)境具有較強的適應(yīng)性。因此,本文選用音圈電機作為快速反射鏡系統(tǒng)的驅(qū)動元件。
音圈電機的運行基于安培力原理,即通電線圈(導(dǎo)體),在磁場中會產(chǎn)生一力F,力的大小與施加在線圈上的電流成比例,具體公式表示為:
式中:N為受到磁場作用的線圈匝數(shù);I為電流大小;L為線圈每匝長度;B是磁場的磁感應(yīng)強度。將音圈電機等效為一個電路原理圖如圖1所示,根據(jù)基爾霍夫第二定律可得音圈電機電壓平衡方程:
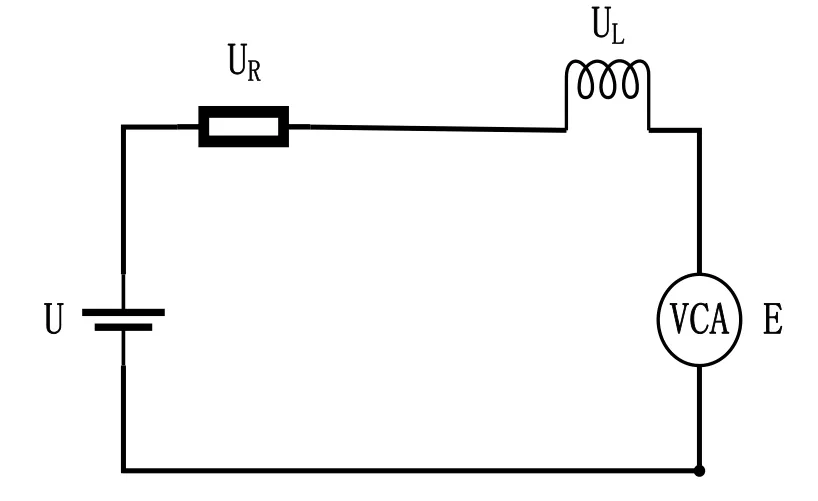
圖1 音圈電機等效電路圖Fig.1 Equivalent circuit diagram of VCA
其中電機產(chǎn)生漏感抗電壓E=keVe。
式中:ke為反電動勢常數(shù);Ve為線圈運動速度;線圈電感L的感應(yīng)壓降UL=L×di/dt;通過電阻R的電壓UR=Ri。將這些等式重新代入上式得:
根據(jù)快速反射鏡在轉(zhuǎn)動過程中受到的音圈電機驅(qū)動力矩、阻尼力矩、柔性鉸鏈力矩以及慣性力矩作用,得到FSM 系統(tǒng)的機械平衡方程為:
式中:J、θ、km分別為快速反射鏡的轉(zhuǎn)動慣量、鏡面轉(zhuǎn)角、柔性鉸鏈扭轉(zhuǎn)剛度。
對式(3)和式(4)進行拉氏變換并聯(lián)立可得:
式中:c為粘滯阻尼系數(shù),消去中間變量i(s),得:
由于音圈電機的電感L和粘滯阻尼系數(shù)c很小,建模時可以忽略不計,所以反射鏡模型可近似為:
2 滑模自抗擾控制器設(shè)計
2.1 ESO 設(shè)計
擴張觀測器將對系統(tǒng)輸出有影響的內(nèi)擾和外擾看成一個總擾動擴張成系統(tǒng)的一個新狀態(tài)變量,并對系統(tǒng)中各個狀態(tài)變量進行觀測,構(gòu)造出新的系統(tǒng)狀態(tài)方程。
以快速反射鏡作為被控對象,將其復(fù)頻域函數(shù)模型式(7)改寫為二階微分方程:
將系統(tǒng)各種外部擾動和模型誤差等效為一個擾動d,則式(8)可以寫為:

式中:x1代表位置信號,x2代表此時運動速度,根據(jù)(9)式把f作為一個新的被擴張狀態(tài)變量加入到系統(tǒng)中,即令x3=f,符號上面加點代表此量對時間的導(dǎo)數(shù)。
根據(jù)被控對象的控制量u和輸出量y,擴張觀測器可以對系統(tǒng)的位置、速度以及總擾動進行估計。其表達形式如下:
式中:Z1是對位置x1的估計;e1是估計誤差;Z2是對此刻運動速度x2的估計;Z3是對總擾動的估計;β1、β2和β3是擴張觀測器的增益。
由式(11)可以得到誤差傳遞矩陣,進一步寫出其特征方程為:
根據(jù)高志強教授基于帶寬參數(shù)確定ESO 增益的算法[12],有期望特征方程:
比較系數(shù)可得到觀測器增益向量為:
2.2 滑模控制器設(shè)計
滑模控制通過控制量切換使系統(tǒng)運動軌跡將保持在滑模面上滑動,具有結(jié)構(gòu)簡單、魯棒性好、可靠性高、抗干擾能力強的優(yōu)點。本文設(shè)計了擴張狀態(tài)觀測器來觀測系統(tǒng)所受總和擾動,通過觀測擾動來補償控制器,減少了對滑模控制增益的要求,從而減少了抖振。本文定義快速反射鏡位置跟蹤誤差為:
式中:θd為期望跟蹤的軌跡;y為實際軌跡。對式(14)求導(dǎo)可得速度跟蹤誤差:
根據(jù)上節(jié)擴張觀測器的定義,結(jié)合式(14)和式(15)得到:
定義滑模面為:
式中:c>0。對式(17)求導(dǎo)并代入式(16)可得:

因此控制的控制器輸出為:
2.3 穩(wěn)定性分析
對于滑模控制器,選取Lyapunov 函數(shù):
則:
綜上所述,快速反射鏡系統(tǒng)的控制器的原理框圖如圖2所示。

圖2 基于擴張狀態(tài)觀測器的滑模控制結(jié)構(gòu)框圖Fig.2 Fragments of sliding mold control structure based on the extended state observer
3 仿真實驗
為了驗證本文提出的SMC-ESO 算法在快速反射鏡系統(tǒng)中的性能,采用Matlab/Simulink 對其有效性進行仿真驗證。SMC-ESO 算法的控制參數(shù)分別為:ω0=100,ε=100,k=800,c=180。傳統(tǒng)滑模控制算法(SMC)的相關(guān)參數(shù)與之選取相同。首先對系統(tǒng)進行階躍響應(yīng)實驗,給定幅值為1 的單位階躍輸入,對兩種算法對比分析,如圖3所示。SMC 算法上升時間為0.0379 s,系統(tǒng)到達穩(wěn)態(tài)的時間是0.0581 s;SMC-ESO算法上升時間為0.0188 s,系統(tǒng)到達穩(wěn)態(tài)的時間是0.0354 s。基于擴張狀態(tài)觀測器的滑模控制器較前者的上升時間縮短了50.4%,調(diào)節(jié)時間縮短了39.1%。根據(jù)仿真實驗可知,SMC-ESO 算法具有較快的響應(yīng)時間和調(diào)節(jié)時間。

圖3 快速反射鏡系統(tǒng)階躍響應(yīng)Fig.3 Step response of fast steering mirror

兩種控制算法的跟蹤誤差曲線如圖5,從圖中可以看出,基于擴張狀態(tài)觀測器的滑模控制和傳統(tǒng)滑模控制的最大跟蹤誤差分別為0.0241、0.0347,前者跟蹤精度較后者提高了30.5%,具有更好的位置跟蹤能力和更強的抗干擾能力。
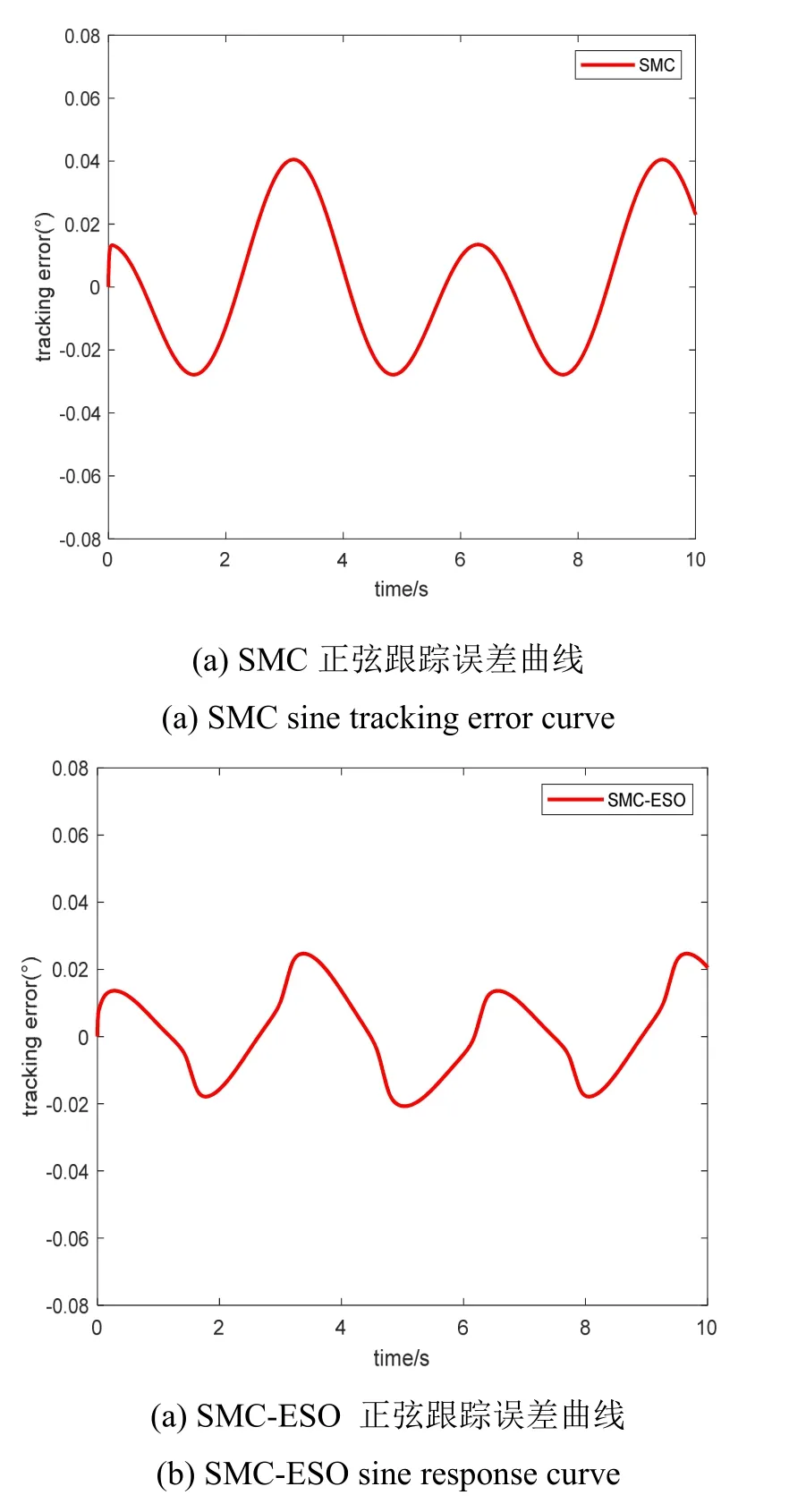
圖5 正弦跟蹤誤差曲線Fig.5 Sine tracking error curves
4 結(jié)論
本文對快速反射鏡系統(tǒng)進行分析與建模,針對系統(tǒng)跟蹤時的快速響應(yīng)和抗干擾問題,通過引入自抗擾控制中的ESO,提出了一種基于擴張狀態(tài)觀測器的改進滑模控制方法。該方法把系統(tǒng)所受總擾動擴張為新的狀態(tài)變量進行觀測估計,并補償?shù)娇刂戚斎胫校垢櫿`差收斂的同時減小抖振。仿真實驗結(jié)果表明:采用基于擴張狀態(tài)觀測器的改進滑模控制器,較傳統(tǒng)滑模控制器,上升時間縮短了50.4%,調(diào)節(jié)時間縮短了39.1%,跟蹤精度提高了30.5%。在不同輸入信號下,本文的方法較傳統(tǒng)滑模控制具有更高的控制精度,更強的抑制干擾能力,具有更好的動態(tài)性能。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32