基于預(yù)探索的動(dòng)態(tài)自適應(yīng)3DVFH+無(wú)人機(jī)避障算法
2024-02-27 04:42:54何晨陽(yáng)王耀力孫永明
電子設(shè)計(jì)工程 2024年4期
何晨陽(yáng),王耀力,常 青,孫永明
(1.太原理工大學(xué)信息與計(jì)算機(jī)學(xué)院,山西太原 030024;2.山西省林業(yè)與草原科學(xué)研究院,山西 太原 030024)
旋翼無(wú)人機(jī)廣泛應(yīng)用在農(nóng)業(yè)[1]、消防[2]、電力檢測(cè)[3]等諸多領(lǐng)域。因此,對(duì)于無(wú)人機(jī)來(lái)說(shuō),能夠在未知且復(fù)雜的環(huán)境下實(shí)現(xiàn)高效感知復(fù)雜環(huán)境下自主規(guī)劃航跡并實(shí)時(shí)規(guī)避障礙物至關(guān)重要[4]。
無(wú)人機(jī)的避障規(guī)劃算法可分為全局避障規(guī)劃算法和局部規(guī)劃算法,全局規(guī)劃算法需要對(duì)環(huán)境進(jìn)行建圖并將環(huán)境信息存儲(chǔ)起來(lái),在已知環(huán)境地圖的前提下進(jìn)行規(guī)劃[5-6]。全局規(guī)劃算法包括Dijkstra 算法[7]、A*算法[8]、Hybird A*算法[9]、Lazy Theat*算法[10]、D*算法[11]以及RRT(快速拓展隨機(jī)樹)算法[12]等,該類算法不會(huì)陷入局部最優(yōu)的問(wèn)題,但需要消耗大量?jī)?nèi)存來(lái)存儲(chǔ)環(huán)境信息;局部規(guī)劃算法對(duì)環(huán)境信息不做存儲(chǔ),實(shí)時(shí)生成避障指令,比如人工勢(shì)場(chǎng)法[13]、BUG 算法[14]、DWA(動(dòng)態(tài)窗口)算法[15]、VFH(靜態(tài)矢量場(chǎng))算法[16]以及3DVFH+算法[17]等,該類算法不需要存儲(chǔ)環(huán)境信息,所需內(nèi)存資源非常小,但會(huì)陷入局部最優(yōu)解。綜合對(duì)比以上各類算法,結(jié)合旋翼無(wú)人機(jī)平臺(tái)硬件資源稀缺且作業(yè)區(qū)域是三維環(huán)境,決定采用3DVFH+算法作為研究對(duì)象,針對(duì)該算法存在的問(wèn)題作出改進(jìn)。
文中將3DVFH+作為一個(gè)純局部算法,不需要構(gòu)建全局地圖。全局地圖被3D 點(diǎn)云所取代,開發(fā)一種成本較低的3D 環(huán)境避障算法。
1 避障規(guī)劃算法
3DVFH+算法利用Octomap 框架來(lái)表征環(huán)境信息,以octotree(八叉樹)的形式構(gòu)建全局地圖,從全局地圖中提取環(huán)境信息,生成障礙物直方圖進(jìn)行避障。
1.1 環(huán)境建圖
Octomap 數(shù)據(jù)結(jié)構(gòu)是一種表示3D 環(huán)境的有效方法[18]。八叉樹中的每個(gè)節(jié)點(diǎn)表示包含在立方體的空間,通常稱為體素。如圖1 所示,白色葉子節(jié)點(diǎn)為空閑狀態(tài),灰色葉子節(jié)點(diǎn)狀態(tài)為占據(jù)狀態(tài)。通過(guò)這種方式,將整個(gè)環(huán)境都由體素進(jìn)行表示。
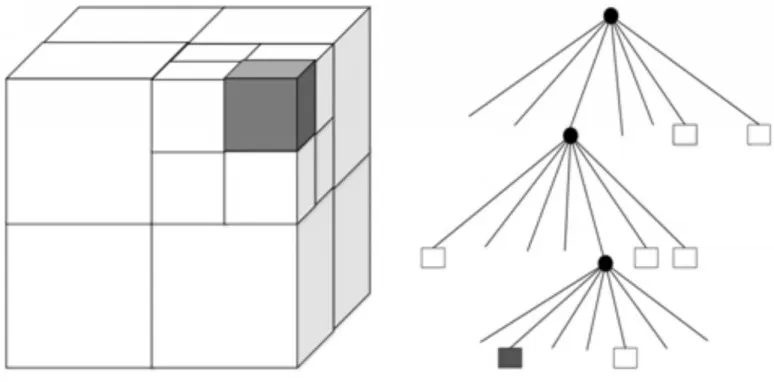
圖1 八叉樹結(jié)構(gòu)
在對(duì)環(huán)境的觀測(cè)過(guò)程中,往往會(huì)受到噪聲或者是環(huán)境本身動(dòng)態(tài)特性的影響,導(dǎo)致節(jié)點(diǎn)是否被占據(jù)屬于概率事件。假設(shè)t=1,2,…,T時(shí)刻,觀測(cè)到的數(shù)據(jù)為z1,z2,…,zT,則第n個(gè)節(jié)點(diǎn)被占據(jù)的概率為:
對(duì)式(1)進(jìn)行l(wèi)ogit變換,將概率變換至全實(shí)數(shù)空間:
反變換為:
式中,α稱為log-odds,用L() 表示節(jié)點(diǎn)的logodds,則上式變?yōu)椋?/p>
由此將空間點(diǎn)狀態(tài)的概率問(wèn)題轉(zhuǎn)化成對(duì)實(shí)數(shù)空間的加和運(yùn)算。
1.2 3DVHF+算法
1.2.1 算法原理
3DVFH+算法一共分為四個(gè)階段,用于計(jì)算無(wú)人機(jī)下一時(shí)刻的航路點(diǎn)。
1)八叉樹地圖探索
當(dāng)無(wú)人機(jī)在大型環(huán)境中移動(dòng)時(shí),由于計(jì)算能力的限制,不可能探索所有的體素,因此,八叉樹探索階段只研究無(wú)人機(jī)周圍包圍框內(nèi)的體素。包圍框以無(wú)人機(jī)中心點(diǎn)為中心,大小為ws·ws·ws。
2)構(gòu)建2D 主極直方圖
將三維體素映射到二維主直方圖中,二維主極直方圖的橫坐標(biāo)為方位角,縱坐標(biāo)為俯仰角。對(duì)于三維點(diǎn)云中的每個(gè)點(diǎn)云數(shù)據(jù),計(jì)算無(wú)人機(jī)位置相對(duì)于該點(diǎn)云的方位角θz和俯仰角θe,然后將該點(diǎn)映射到二維主極直方圖中。
如圖2所示,在笛卡爾坐標(biāo)系下對(duì)體素進(jìn)行建模。
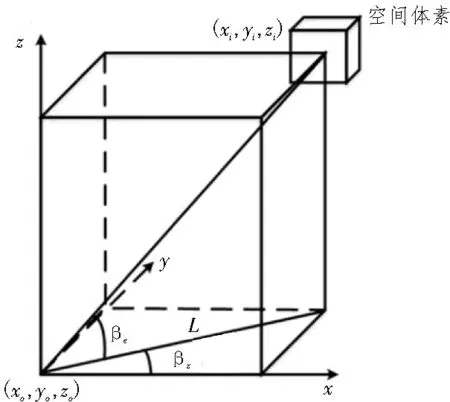
圖2 體素在笛卡爾坐標(biāo)系下的表示
圖2 中,(xo,yo,zo)為無(wú)人機(jī)的質(zhì)心坐標(biāo),(xi,yi,zi)為障礙物體素的坐標(biāo),則有:
其中,L可表示為:
3)二值化極直方圖
將2D 主極直方圖中的每個(gè)格點(diǎn)的值與兩個(gè)閾值τlow和τhigh進(jìn)行比較,大于τhigh時(shí),將該格點(diǎn)置為1;小于τlow時(shí),將該格點(diǎn)置為0。如果格點(diǎn)的值位于兩個(gè)閾值之間,則用該格點(diǎn)旁邊的值來(lái)替代,如式(8)所示,這兩個(gè)閾值允許算法區(qū)分真實(shí)障礙物和測(cè)量誤差。
4)路徑檢測(cè)與選擇
為了確定可用路徑,使用滑動(dòng)窗口在2D 主極直方圖中進(jìn)行檢測(cè),如果窗口中的所有元素都等于0,則將該窗口標(biāo)記為可通過(guò),這樣可以得到所有的候選方向,然后計(jì)算代價(jià)函數(shù)得到最優(yōu)方向。
3DVFH+算法同時(shí)將候選方向與目標(biāo)方向、當(dāng)前方向、前一時(shí)刻方向的差值考慮進(jìn)來(lái)。采用式(9)所示代價(jià)函數(shù)得到最佳的前進(jìn)方向:
式中,dk為第k個(gè)候選方向,Δ 為計(jì)算兩項(xiàng)的絕對(duì)值,λ1、λ2、λ3分別為各個(gè)代價(jià)項(xiàng)的權(quán)重因子。第一項(xiàng)表示dk與目標(biāo)方向kt的絕對(duì)差值,第二項(xiàng)表示dk與無(wú)人機(jī)航向角的絕對(duì)差值,第三項(xiàng)表示dk與無(wú)人機(jī)上一時(shí)刻運(yùn)動(dòng)方向kd,n-1的絕對(duì)差值。
1.2.2 3DVFH+算法仿真
使用四軸旋翼飛行器作為實(shí)驗(yàn)平臺(tái),通過(guò)設(shè)置“倒L”型以及長(zhǎng)墻障礙物來(lái)說(shuō)明算法的局部死區(qū)以及最優(yōu)解問(wèn)題。
如圖3 所示,對(duì)于長(zhǎng)墻障礙物,無(wú)人機(jī)在障礙物面前往返飛行,猶豫不定。對(duì)于“倒L”型障礙物,無(wú)人機(jī)在拐角處往返飛行,陷入局部死區(qū)。同時(shí)可以看出,針對(duì)“倒L”型障礙物,由于視野正前方?jīng)]有障礙物,故無(wú)人機(jī)選擇了一條更長(zhǎng)的路徑,暴露了算法局部最優(yōu)問(wèn)題。
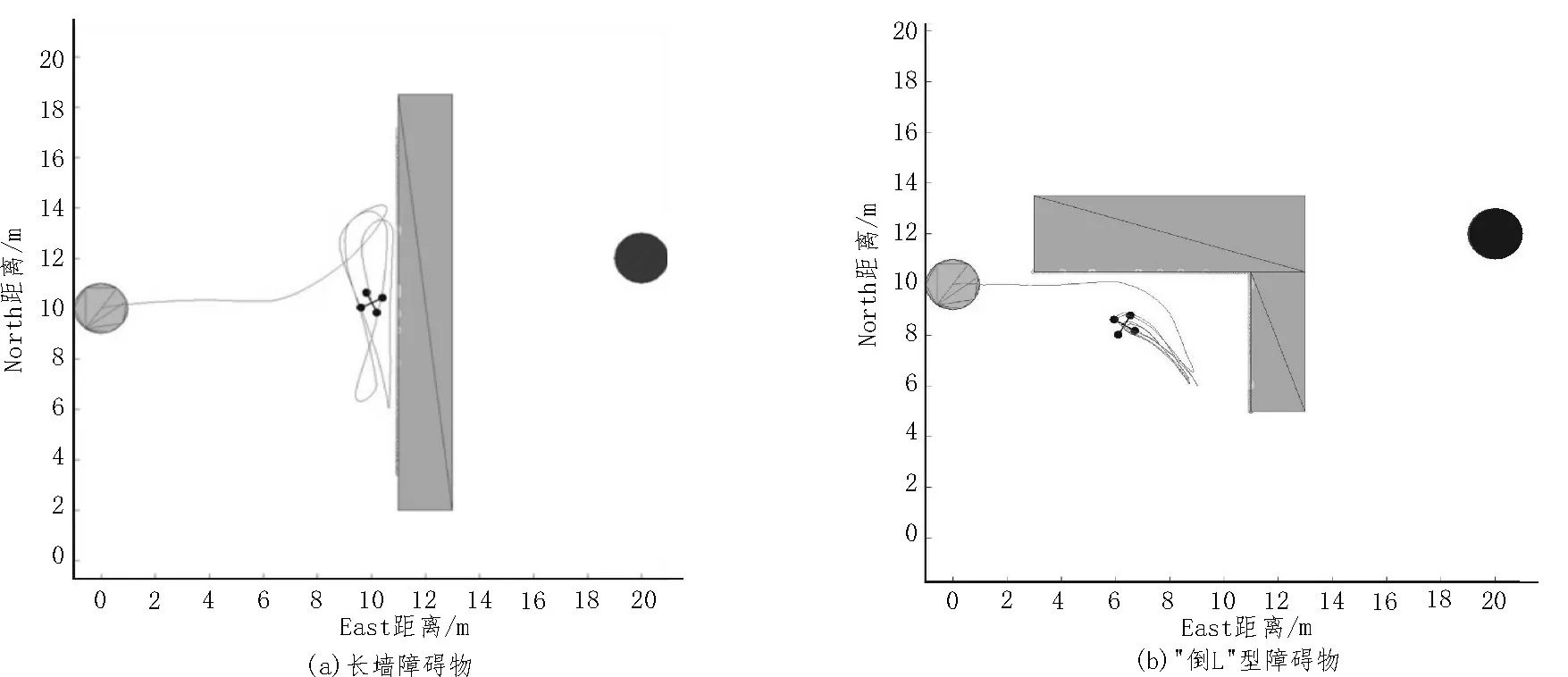
圖3 原生算法
2 基于預(yù)探索的動(dòng)態(tài)自適應(yīng)3DVFH+算法
3DVFH+算法無(wú)法根據(jù)環(huán)境特性實(shí)時(shí)動(dòng)態(tài)地做出調(diào)整,導(dǎo)致在面對(duì)特殊障礙物時(shí)會(huì)陷入局部死區(qū)。同時(shí)3DVFH+作為一個(gè)純局部算法,存在局部最優(yōu)解的固有問(wèn)題。下面將對(duì)這兩個(gè)問(wèn)題進(jìn)行改進(jìn)。
2.1 自適應(yīng)代價(jià)函數(shù)
在原生代價(jià)函數(shù)中,當(dāng)候選航路點(diǎn)與目標(biāo)點(diǎn)之間的距離到達(dá)某一閾值時(shí),代價(jià)由候選航路點(diǎn)與目標(biāo)之間的距離主導(dǎo),此時(shí)無(wú)人機(jī)便會(huì)做出轉(zhuǎn)向的決策,從而造成了無(wú)人機(jī)往返飛行猶豫不定的現(xiàn)象。
對(duì)于3DVFH+算法的局部死區(qū)問(wèn)題,根據(jù)飛行進(jìn)度對(duì)代價(jià)函數(shù)的目標(biāo)距離權(quán)重因子進(jìn)行動(dòng)態(tài)調(diào)整,設(shè)置自適應(yīng)代價(jià)函數(shù)來(lái)消除算法的局部死區(qū)問(wèn)題。
首先將原始代價(jià)函數(shù)分為兩部分,分別是導(dǎo)航方向代價(jià)和路徑平滑代價(jià),如下所示:
將代價(jià)函數(shù)式(10)細(xì)化為偏航代價(jià)與俯仰代價(jià)兩部分,如下所示:
f(dk)t為導(dǎo)航方向代價(jià),分為偏航代價(jià)和俯仰代價(jià)兩部分,對(duì)應(yīng)的權(quán)重因子分別為λt_yaw和λt_pitch值。總的代價(jià)函數(shù)如式(13)所示:
其中,參數(shù)kt為導(dǎo)航方向代價(jià)的權(quán)重因子,參數(shù)ks為路徑平滑代價(jià)的權(quán)重因子。可通過(guò)配置上述各個(gè)代價(jià)項(xiàng)的權(quán)重因子得到側(cè)重性能不同的算法效果。
為實(shí)現(xiàn)對(duì)飛行進(jìn)展進(jìn)行監(jiān)控,動(dòng)態(tài)調(diào)整無(wú)人機(jī)距離目標(biāo)的成本,需要監(jiān)控?zé)o人機(jī)與目標(biāo)距離的趨勢(shì)。文中采用滑動(dòng)平均濾波器來(lái)表征無(wú)人機(jī)行為,如式(14)所示:
式中,t[k] 為當(dāng)前時(shí)刻,d[k] 為當(dāng)前時(shí)刻無(wú)人機(jī)與目標(biāo)之間的距離。當(dāng)s[k] 為負(fù)值且絕對(duì)值較大時(shí),說(shuō)明無(wú)人機(jī)飛行效果良好,在不斷靠近目標(biāo)點(diǎn);當(dāng)s[k] 在零附近時(shí),說(shuō)明無(wú)人機(jī)在沿著障礙物做長(zhǎng)時(shí)間的繞行;當(dāng)s[k] 為正值且較大時(shí),說(shuō)明無(wú)人機(jī)在不斷地遠(yuǎn)離目標(biāo)點(diǎn)。
有了對(duì)飛行行為的表征后,先為權(quán)重因子λt_yaw設(shè)定一個(gè)最大值λt_yaw_max和最小值λt_yaw_min以保障飛行安全。引入斜率閾值st且為負(fù)值,當(dāng)s[k] 小于st時(shí),說(shuō)明此時(shí)無(wú)人機(jī)正在接近目標(biāo),不用調(diào)整;當(dāng)s[k] 大于st且在零值附近時(shí),引入?yún)^(qū)間Δsec來(lái)衡量s[k] 與零的絕對(duì)差值,說(shuō)明無(wú)人機(jī)正在做無(wú)用的繞行,需要對(duì)繞行動(dòng)作加以抑制,故以一定的速率rdec減小λtarget_yaw;當(dāng)s[k] 大于st且為正值時(shí),說(shuō)明無(wú)人機(jī)正在遠(yuǎn)離目標(biāo),若在無(wú)人機(jī)視野范圍FOV 內(nèi)檢測(cè)到障礙物,則以一定的速率rdec減小λt_yaw,允許無(wú)人機(jī)為了避開障礙物而做出適度遠(yuǎn)離目標(biāo)的行為,若在FOV 內(nèi)沒(méi)有檢測(cè)到障礙物,則以一定的速率rinc增大λt_yaw,即在沒(méi)有障礙物情況下增大無(wú)人機(jī)遠(yuǎn)離目標(biāo)的代價(jià),使無(wú)人機(jī)更快到達(dá)目標(biāo),如式(15)所示:
對(duì)采用自適應(yīng)代價(jià)函數(shù)的3DVFH+算法在同樣的障礙物環(huán)境下進(jìn)行仿真,結(jié)果如圖4 所示,可以看出改進(jìn)之后的算法消除了原生算法的局部死區(qū)問(wèn)題。
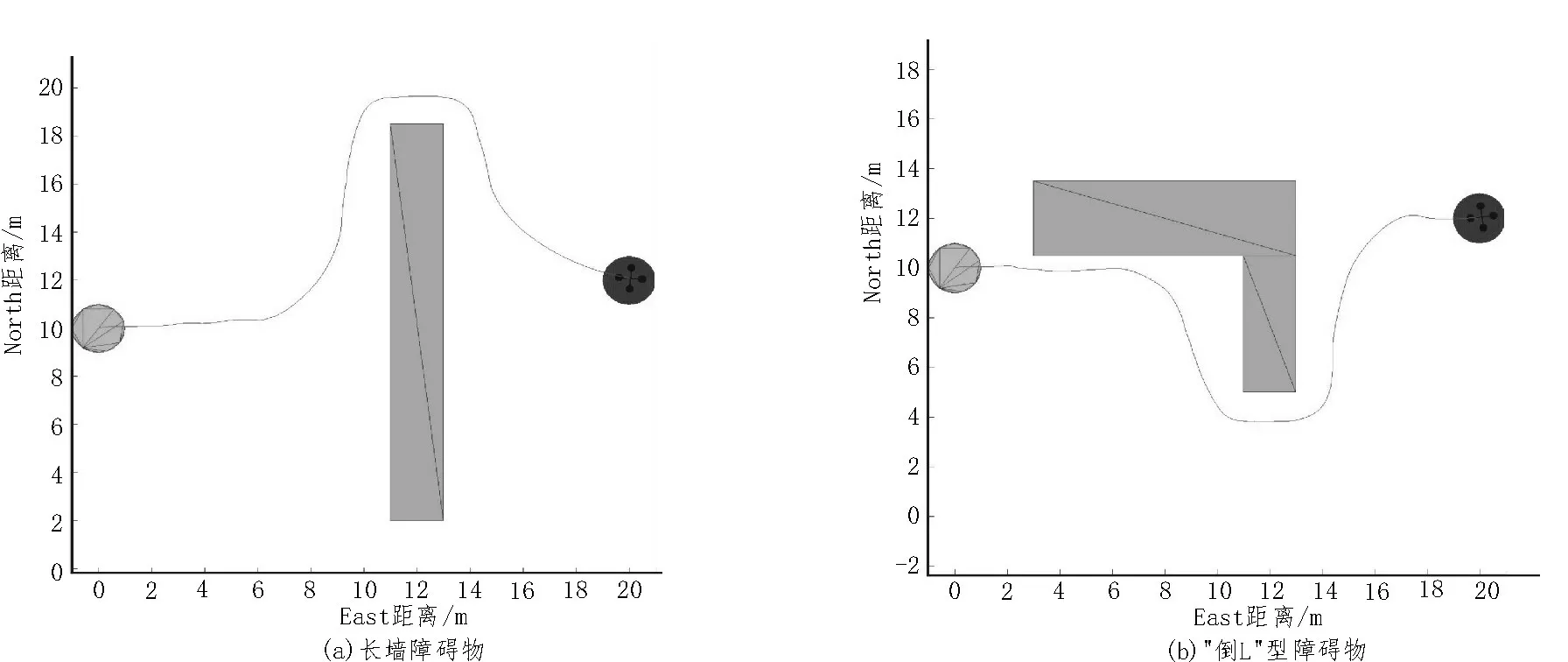
圖4 改進(jìn)算法
2.2 預(yù)探索機(jī)制
通過(guò)圖4(b)可以看出,自適應(yīng)代價(jià)函數(shù)解決了算法的局部死區(qū)問(wèn)題,但無(wú)人機(jī)當(dāng)前規(guī)劃的航跡并不是最優(yōu)軌跡。文中提出了預(yù)探索機(jī)制,通過(guò)構(gòu)建搜索樹消除局部最優(yōu)的缺陷。
如圖5 所示,虛線為無(wú)人機(jī)所有的探索節(jié)點(diǎn),實(shí)線為代價(jià)函數(shù)值最小的節(jié)點(diǎn)方向。O點(diǎn)為無(wú)人機(jī)當(dāng)前位置,Ai、Bi、Ci、Di、Ei為無(wú)人機(jī)未來(lái)可能到達(dá)的位置。從所有的候選方向中計(jì)算出代價(jià)最小的方向,在此方向上前進(jìn)ds繼續(xù)進(jìn)行探索,經(jīng)過(guò)N次直方圖的迭代并逐步構(gòu)建搜索樹,樹的根節(jié)點(diǎn)為O,深度為Dtree。當(dāng)樹深度為1時(shí)該算法便退化為原生3DVHF+算法。

圖5 預(yù)探索
如圖6 所示,建立預(yù)探索后的算法對(duì)整個(gè)傳感器范圍進(jìn)行探索,消除了原生算法局部最優(yōu)的問(wèn)題。
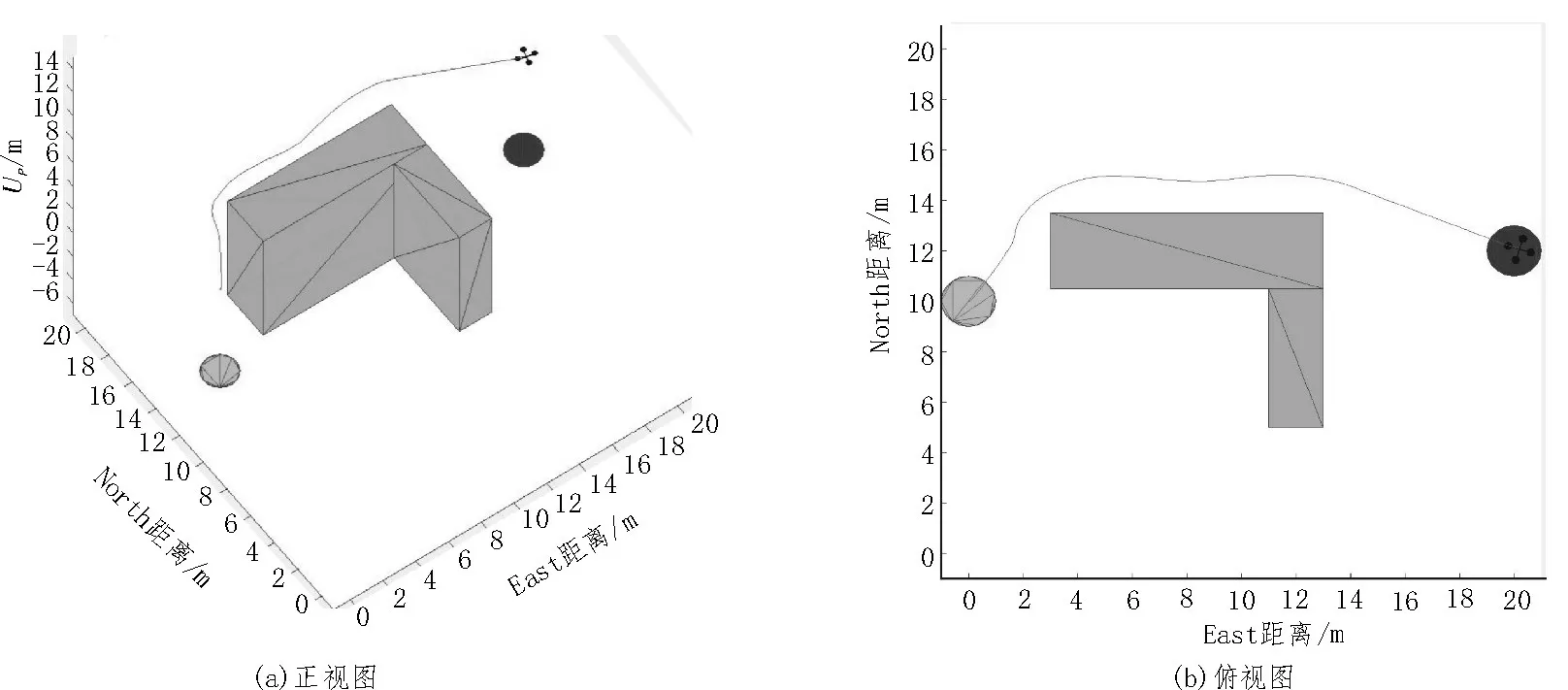
圖6 消除局部最優(yōu)
3 3D可視化仿真平臺(tái)算法驗(yàn)證分析
3.1 仿真平臺(tái)搭建
如圖7 所示,PX4 飛行控制器是無(wú)人機(jī)的控制核心,該模型上搭載了一個(gè)深度相機(jī),提供點(diǎn)云數(shù)據(jù)。仿真引擎Gazebo模擬無(wú)人機(jī)及外部環(huán)境,它允許在無(wú)人機(jī)模型上搭載傳感器,以提供數(shù)據(jù)輸出流,模擬真實(shí)環(huán)境。機(jī)載計(jì)算機(jī)提供ROS操作系統(tǒng)運(yùn)行環(huán)境。
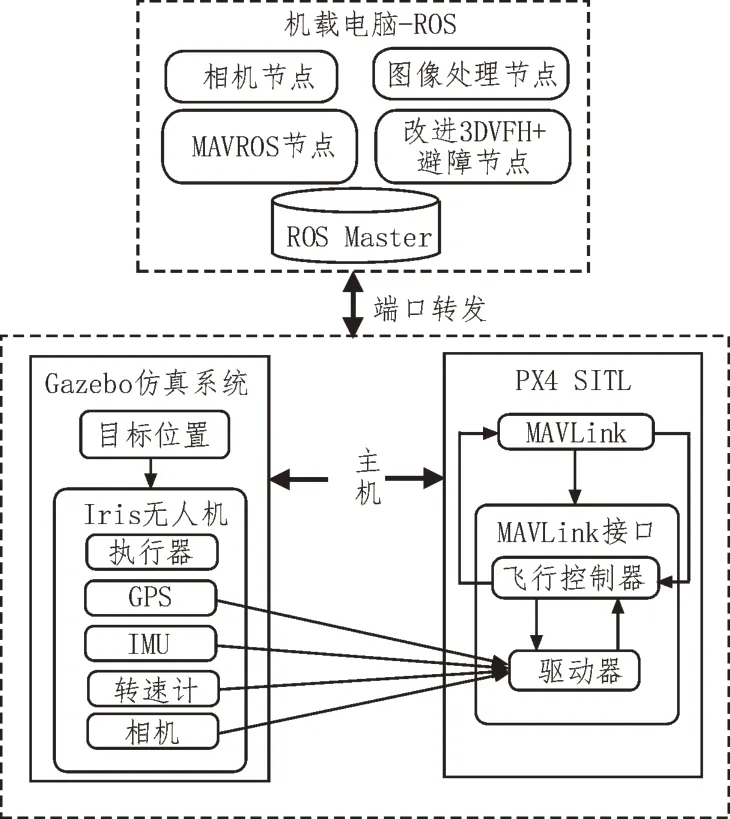
圖7 仿真系統(tǒng)架構(gòu)
3.2 仿真結(jié)果
設(shè)置無(wú)人機(jī)與障礙物之間安全距離為2 m。改進(jìn)算法與原生算法對(duì)比如圖8 所示。實(shí)線為預(yù)規(guī)劃軌跡,虛線為預(yù)規(guī)劃軌跡經(jīng)過(guò)飛行控制器結(jié)合無(wú)人機(jī)動(dòng)力學(xué)特性后的實(shí)際飛行軌跡。
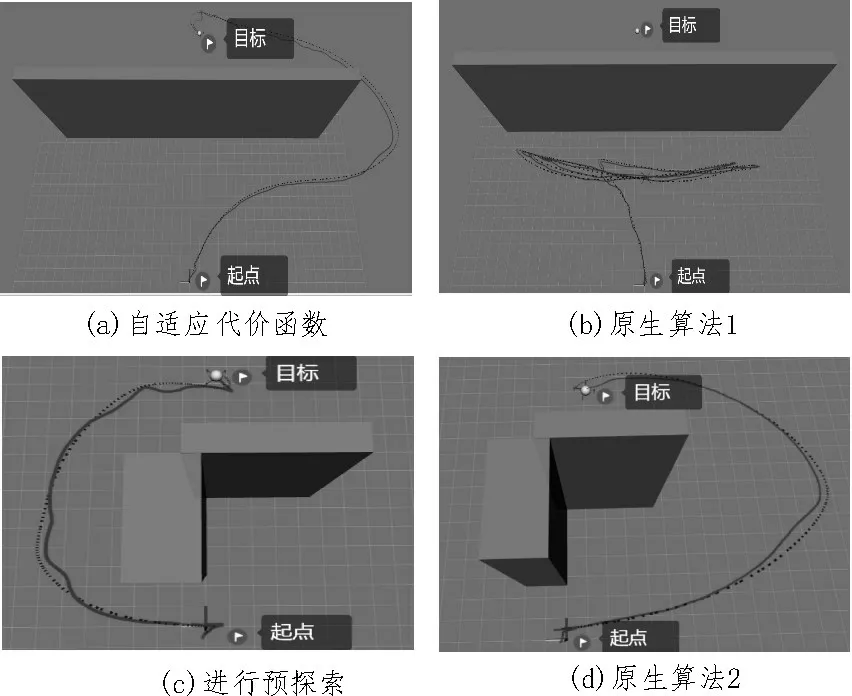
圖8 改進(jìn)算法與原生算法對(duì)比
如圖8(a)、(b)所示,針對(duì)原生算法的局部死區(qū)問(wèn)題,設(shè)置長(zhǎng)墻障礙物,目標(biāo)點(diǎn)坐標(biāo)為(12,0,3),無(wú)人機(jī)起點(diǎn)坐標(biāo)為(0,0,0),長(zhǎng)墻障礙物中心點(diǎn)坐標(biāo)為(8,0,6),尺寸為(1,30,10)。原生算法陷入局部死區(qū),而改進(jìn)算法順利到達(dá)目標(biāo)點(diǎn)。如圖8(c)、(d)所示,針對(duì)原生算法局部最優(yōu)問(wèn)題,同樣設(shè)置“倒L”型障礙物。目標(biāo)坐標(biāo)為(20,0,3),起點(diǎn)坐標(biāo)為(0,0,0),水平方向障礙物中心坐標(biāo)為(7,-2,5),尺寸為(1,5,10)。垂直方向障礙物中心坐標(biāo)為(5,1,5),尺寸為(5,2,10)。在算法構(gòu)建搜索樹的決策中,對(duì)“倒L”型障礙物下方空間。也進(jìn)行了探索,當(dāng)探索到障礙物時(shí)便停止了探索,并通過(guò)對(duì)上方空間的探索找到了更優(yōu)路徑。
表1 是算法在面對(duì)不同類型障礙物的規(guī)劃路徑長(zhǎng)度和時(shí)間對(duì)比。對(duì)于長(zhǎng)墻障礙物,原生算法陷入死區(qū),而改進(jìn)算法消除了死區(qū)現(xiàn)象,成功到達(dá)目標(biāo)點(diǎn);對(duì)于“倒L”型障礙物,改進(jìn)算法解決了局部最優(yōu)解問(wèn)題,相較于原生算法規(guī)劃航線縮短了37.15%,時(shí)間減少了25.87%。
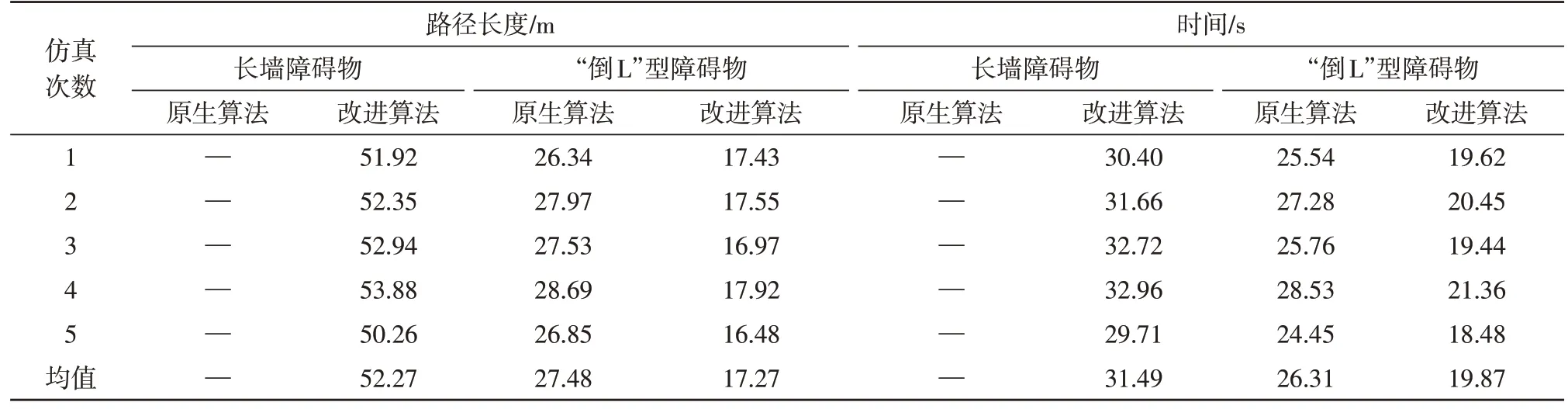
表1 算法效果對(duì)比表
3.3 航跡規(guī)劃
森林相對(duì)來(lái)說(shuō)環(huán)境復(fù)雜度較高,點(diǎn)云稀疏且不規(guī)則,無(wú)人機(jī)在森林環(huán)境避障的難度較大。如圖9所示,搭建森林模型,利用地面站規(guī)劃航跡上傳至飛控,共設(shè)置了七個(gè)航路點(diǎn),可以直觀地看出無(wú)人機(jī)進(jìn)行自主避障生成的平滑且無(wú)碰撞的飛行軌跡,進(jìn)一步驗(yàn)證了改進(jìn)算法的有效性。
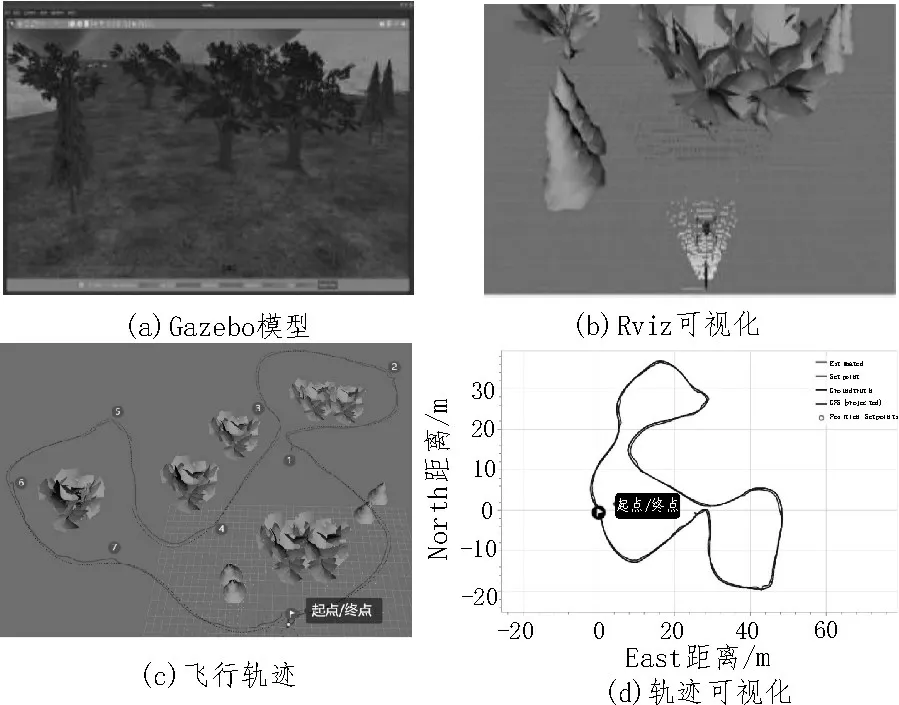
圖9 森林障礙物軌跡規(guī)劃
圖10 所示是所提算法與使用八叉樹框架進(jìn)行建圖的3DVFH+算法在執(zhí)行相同飛行任務(wù)時(shí)的所需資源對(duì)比,橫坐標(biāo)為飛行時(shí)間,縱坐標(biāo)為所占資源比例。可以看出,改進(jìn)算法由于不用進(jìn)行建圖和存儲(chǔ)環(huán)境信息,RAM 節(jié)省了約25.26%。
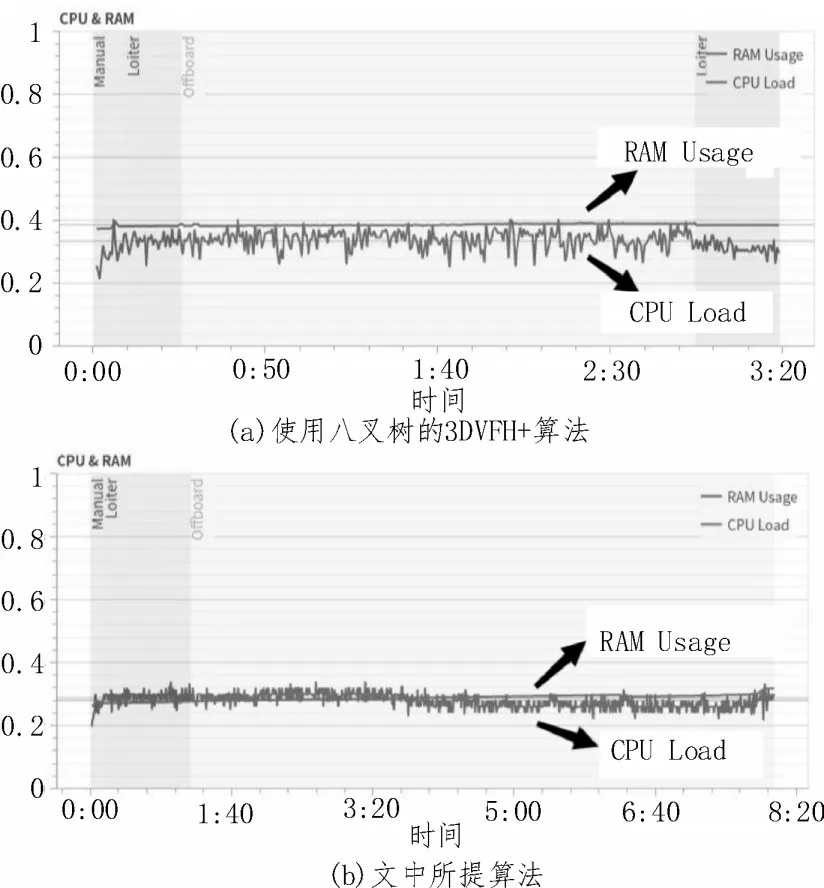
圖10 CPU和RAM使用情況
4 結(jié)束語(yǔ)
文中提出了一種基于預(yù)探索機(jī)制的動(dòng)態(tài)自適應(yīng)3DVFH+避障規(guī)劃算法,該算法作為一個(gè)純反應(yīng)式的避障算法,不需要對(duì)環(huán)境建圖且不存儲(chǔ)環(huán)境信息,減小了對(duì)存儲(chǔ)資源的消耗。實(shí)驗(yàn)表明該文提出的避障規(guī)劃算法在面對(duì)特殊復(fù)雜障礙物時(shí)仍能生成一條平滑無(wú)碰撞的飛行軌跡,生成的路徑長(zhǎng)度更短,所需時(shí)間更少,且不會(huì)陷入死區(qū)和局部最優(yōu)解問(wèn)題。
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
- 電子設(shè)計(jì)工程的其它文章
- 基于稀疏重建和激光實(shí)境復(fù)制的電力工程建模方法
- 基于DN-YOLOv5 遙感目標(biāo)快速檢測(cè)方法
- 面向圖模聯(lián)調(diào)校核的GIS與配網(wǎng)圖形節(jié)點(diǎn)數(shù)據(jù)融合技術(shù)研究
- 面向醫(yī)學(xué)檢驗(yàn)數(shù)據(jù)分析的增強(qiáng)深度學(xué)習(xí)預(yù)測(cè)模型
- 基于極限學(xué)習(xí)機(jī)的超短期電力負(fù)荷度量研究
- 路面裂縫檢測(cè)與統(tǒng)計(jì)輔助系統(tǒng)設(shè)計(jì)