基于稀疏重建和激光實(shí)境復(fù)制的電力工程建模方法
2024-02-27 04:43:30胡軼龍李卓彬
電子設(shè)計(jì)工程 2024年4期
關(guān)鍵詞:實(shí)驗(yàn)模型
周 鑫,胡軼龍,張 瀟,李 豪,李卓彬
(國網(wǎng)北京市電力公司電力建設(shè)工程咨詢分公司,北京 100021)
隨著我國電網(wǎng)建設(shè)規(guī)模的不斷擴(kuò)大,電網(wǎng)系統(tǒng) 安全、平穩(wěn)運(yùn)行的需求也在逐步提高。作為電網(wǎng)重要的組成部分之一,輸電線路是電力運(yùn)輸?shù)妮d體,其結(jié)構(gòu)完整性始終是電力工程管理部分的檢測重點(diǎn)。當(dāng)前,電網(wǎng)工程輸電線路驗(yàn)收仍采用人工測量的方式,但該種方式在測量準(zhǔn)確性、全面性及安全性等方面均存在一定的局限。
由于無人機(jī)與數(shù)學(xué)建模技術(shù)的持續(xù)發(fā)展,輸電線路的工程驗(yàn)收也有了新的實(shí)施方案。常用的模型重建方法有GPS、激光成像和雙目視覺(Stereo Vision)等[1-3]。其中GPS 方法雖然測距精確,但操作較為復(fù)雜,且花費(fèi)的時(shí)間、成本偏高。雙目視覺法通過模擬人類雙眼來對目標(biāo)進(jìn)行掃描,其優(yōu)點(diǎn)是成本低,而缺點(diǎn)則是測量準(zhǔn)確度較差,導(dǎo)致在機(jī)載平臺的表現(xiàn)不理想。而激光成像雖成本較高,但該方法可準(zhǔn)確測量輸電線路表面的具體坐標(biāo),同時(shí)機(jī)載的實(shí)時(shí)性也較強(qiáng)。因此,文中使用激光雷達(dá)來獲取輸電線路的點(diǎn)云數(shù)據(jù)(Point Cloud Data),并利用重建算法對點(diǎn)云數(shù)據(jù)進(jìn)行準(zhǔn)確還原。
1 輸電線路激光點(diǎn)云數(shù)據(jù)獲取
1.1 激光雷達(dá)與點(diǎn)云數(shù)據(jù)
無人機(jī)機(jī)載激光雷達(dá)[4]是一種準(zhǔn)確性高、實(shí)時(shí)性強(qiáng)的距離獲取技術(shù)。而點(diǎn)云數(shù)據(jù)[5]指的是激光雷達(dá)從探測目標(biāo)表面獲取的三維坐標(biāo)點(diǎn)。作為一種主動(dòng)式的探測方法,激光雷達(dá)的工作原理是向探測目標(biāo)發(fā)射脈沖信號,該信號接觸到物體表面后會(huì)反射進(jìn)入雷達(dá)接收機(jī)中,再通過對回波信號分析進(jìn)而得到目標(biāo)的距離、角度與速度等信息。
激光雷達(dá)的測距公式為:
式中,r是目標(biāo)與激光雷達(dá)的距離,c 為光速,t為發(fā)射信號與回波信號的傳播時(shí)間差。
激光雷達(dá)所在空間為球坐標(biāo)系,假定激光雷達(dá)坐標(biāo)為(r,ω,α),則球坐標(biāo)系具體如圖1 所示。
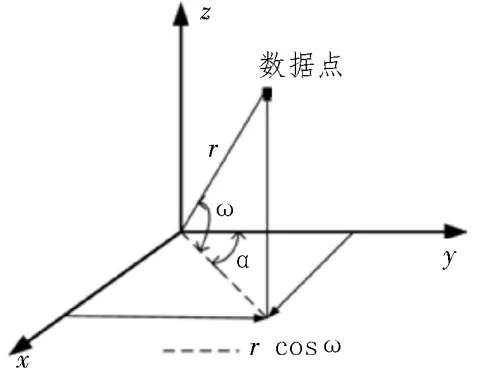
圖1 球坐標(biāo)系
但在實(shí)際世界中的坐標(biāo)數(shù)據(jù)則為直角坐標(biāo),因此需要將原始點(diǎn)云數(shù)據(jù)由球坐標(biāo)系變換至直角坐標(biāo)系。點(diǎn)云數(shù)據(jù)包括水平角、俯仰角以及方位角,坐標(biāo)轉(zhuǎn)換可表征為:
1.2 點(diǎn)云數(shù)據(jù)預(yù)處理
為了使后續(xù)模型重建更為精確,還需對點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理。在雷達(dá)實(shí)際測量過程中,由于受制于環(huán)境或自身誤差因素的影響,通常會(huì)出現(xiàn)離散點(diǎn)。而離散點(diǎn)與實(shí)際測量點(diǎn)之間的距離較遠(yuǎn),故需選擇算法對其進(jìn)行去除。
文中使用索引樹近鄰搜索法(K-dimensional Tree,Kd-Tree)[6-9],該方法屬于聚類算法。其將原始點(diǎn)云算法匯集至索引樹中,并搜尋點(diǎn)云數(shù)據(jù)中的近鄰數(shù)據(jù),且對滿足要求的點(diǎn)進(jìn)行聚類,再計(jì)算平均距離。該計(jì)算過程如下:
式中,di為點(diǎn)云P中任意一點(diǎn)pi與鄰近點(diǎn)的平均距離,k為鄰近點(diǎn)個(gè)數(shù),j為鄰近點(diǎn)序號。
數(shù)據(jù)點(diǎn)過濾的門限值如下所示:
式中,μ為門限值,N為點(diǎn)云P中所有數(shù)據(jù)點(diǎn)的總數(shù)量。數(shù)據(jù)標(biāo)準(zhǔn)差σ為:
則過濾閾值由門限值和數(shù)據(jù)標(biāo)準(zhǔn)差共同決定,計(jì)算公式如下:
式中,α為固定參數(shù),由具體數(shù)據(jù)集合確定。判斷點(diǎn)di是否滿足式(6),若不滿足,則將其判定為離群點(diǎn),作刪除處理。離群點(diǎn)過濾流程如圖2 所示。
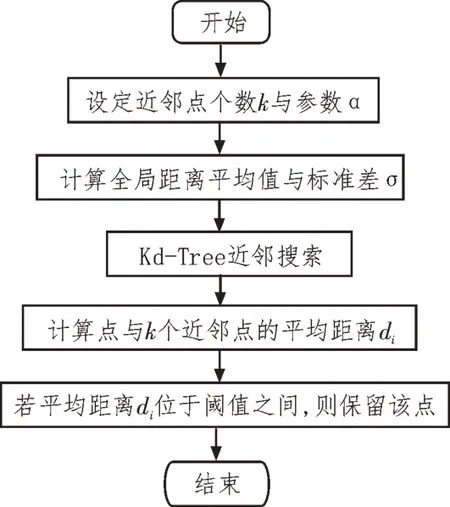
圖2 離群點(diǎn)過濾流程
1.3 點(diǎn)云數(shù)據(jù)輸出
完成點(diǎn)云數(shù)據(jù)的采集和預(yù)處理后,再進(jìn)行輸出。數(shù)據(jù)輸出流程如圖3 所示。
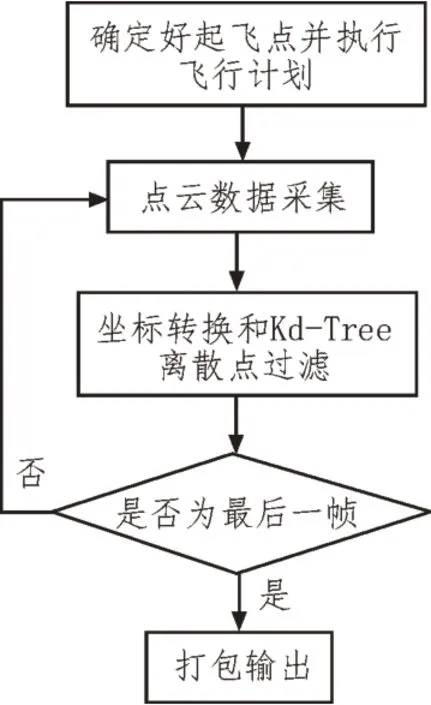
圖3 數(shù)據(jù)輸出流程
文中點(diǎn)云數(shù)據(jù)的輸出包括四個(gè)部分:
1)確定好起飛點(diǎn),規(guī)劃飛行路線并進(jìn)行數(shù)據(jù)掃描;
2)機(jī)載激光雷達(dá)在直角坐標(biāo)系下,生成原始點(diǎn)云數(shù)據(jù)集合P,同時(shí)使用Kd-Tree 對離散點(diǎn)進(jìn)行過濾;
3)設(shè)置激光雷達(dá)掃描次數(shù),且組成一幀數(shù)據(jù);
4)點(diǎn)云數(shù)據(jù)集打包輸出。
最終輸出的點(diǎn)云數(shù)據(jù)如圖4 所示。
2 點(diǎn)云數(shù)據(jù)重建
2.1 稀疏模型重建算法
稀疏模型重建算法(Structure From Motion,SFM)[10-12]是一種基于雷達(dá)的自標(biāo)定重建方法。其能提取激光點(diǎn)云三維數(shù)據(jù)的主要特征點(diǎn),并對主要輪廓進(jìn)行重建。假設(shè)激光點(diǎn)云數(shù)據(jù)共有m幀,且每幀均有k個(gè)坐標(biāo),則點(diǎn)云稀疏表示如下:
式中,xij代指第i幀圖像中第j個(gè)點(diǎn)的稀疏表示,Pi表示第i幀的投影矩陣,Xj表示第j個(gè)點(diǎn)云數(shù)據(jù)點(diǎn)的坐標(biāo)。
在點(diǎn)云數(shù)據(jù)重建時(shí),需按照誤差最小的原則進(jìn)行操作,以此避免結(jié)構(gòu)陷入局部值而導(dǎo)致的重建終止。同時(shí),選擇相鄰的兩幅圖像對算法參數(shù)進(jìn)行初始化。誤差最小化原則為:
式中,R、T為相機(jī)姿態(tài),K(?)為臨近函數(shù),D(?)為距離函數(shù)。基于以上過程,最終得到模型的稀疏框架。
2.2 稠密模型重建算法
由于稀疏模型重建算法僅能對點(diǎn)云框架進(jìn)行重建,所得到的模型無法正常使用,因此還需進(jìn)行稠密重建過程(Multi-View Stereo,MVS)[13-16]。文中選用了面片重建算法,該算法模型如圖5 所示。
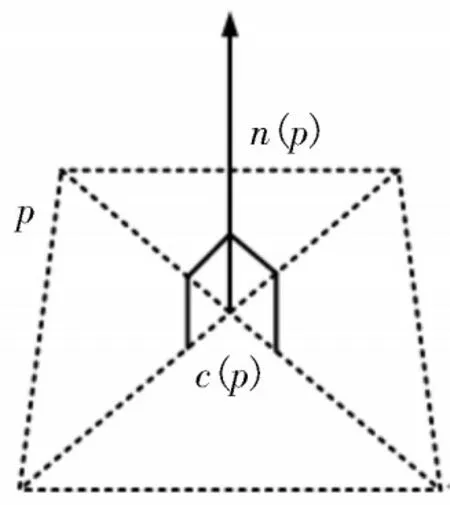
圖5 面片模型
圖5 中,面片模型為一個(gè)模擬的矩形。該結(jié)構(gòu)由三部分組成,包括中心點(diǎn)c,與中心點(diǎn)垂直的法向量n,矩形平面p。中心點(diǎn)即為點(diǎn)云數(shù)據(jù)點(diǎn),矩形平面的選擇參考2.1 節(jié)中稀疏點(diǎn)的選擇方法,而在稀疏框架中則以5 個(gè)像素為單位進(jìn)行選擇。
面片重建算法由以下步驟組成:
1)初始化匹配。根據(jù)稀疏框架,搜索點(diǎn)云圖像特征值。參數(shù)初始化過程為:
式中,O(Ii)為圖像的光心,f為圖像特征點(diǎn),Ii為第i幀圖像。
2)面片擴(kuò)展。該過程將稀疏數(shù)據(jù)點(diǎn)擴(kuò)展為稠密數(shù)據(jù)點(diǎn)。對于初始化完畢的面片p,構(gòu)建鄰域集合C。其計(jì)算方式如下:
其中,Ci為圖像小塊,Qi為面片優(yōu)化后的集合。
3)面片濾波。在構(gòu)建過程中,可能會(huì)存在因面片擴(kuò)展而造成的誤差較大部分,因此需對面片進(jìn)行濾波處理。濾除閾值可表征為:
式中,V(p)為可視化圖像合集,U(p)為投影區(qū)間,g(p)為濾除概率,*表示上次更新前的數(shù)值,經(jīng)過比較后更新面片優(yōu)化合集。
綜上所述,基于稀疏-稠密算法的點(diǎn)云數(shù)據(jù)重建算法流程如圖6 所示。
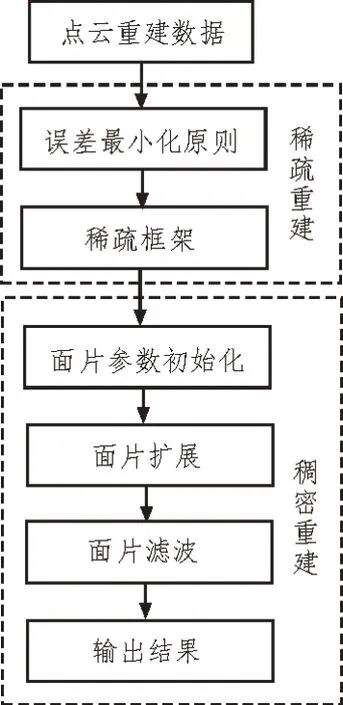
圖6 數(shù)據(jù)重建算法流程
3 算法性能測試
3.1 機(jī)載實(shí)驗(yàn)平臺
為了進(jìn)行環(huán)境掃描及場景重建,文中設(shè)計(jì)了完整的機(jī)載激光雷達(dá)系統(tǒng)。該系統(tǒng)包括大疆工業(yè)無人機(jī)、Livox 激光雷達(dá)與機(jī)載數(shù)據(jù)采集單元等。實(shí)驗(yàn)平臺的具體信息如表1 所示[17-18]。
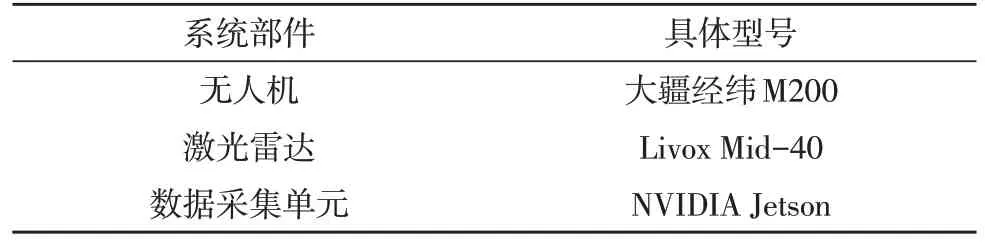
表1 實(shí)驗(yàn)平臺具體信息
數(shù)據(jù)采集完畢后,重建工作將在計(jì)算機(jī)平臺進(jìn)行,并使用Matlab R2017a 完成點(diǎn)云數(shù)據(jù)的預(yù)處理及稀疏-稠密重建。后端實(shí)驗(yàn)平臺信息如表2 所示。

表2 后端實(shí)驗(yàn)平臺具體信息
3.2 仿真結(jié)果分析與對比
實(shí)驗(yàn)分為點(diǎn)云數(shù)據(jù)生成測試與重建功能驗(yàn)證。點(diǎn)云生成測試采用機(jī)載激光雷達(dá)對某電網(wǎng)輸電線路進(jìn)行拍攝,對比算法選擇了迭代最近點(diǎn)(Iterative Closest Point,ICP)、廣義迭代最近 點(diǎn)(GeneralizedICP,GICP)及同態(tài)濾波算法(Homomorphic Filter)。算法對拍攝的圖像進(jìn)行點(diǎn)云生成測試,參照標(biāo)準(zhǔn)為輸電線路的實(shí)際測試值。而指標(biāo)則為點(diǎn)云數(shù)據(jù)誤差值,定義為實(shí)際生成與標(biāo)準(zhǔn)點(diǎn)云坐標(biāo)之間的距離平均誤差。實(shí)驗(yàn)結(jié)果如表3 所示。

表3 實(shí)驗(yàn)結(jié)果
由表3可知,該文算法的點(diǎn)云誤差值僅為8.42 cm,與其他算法相比該值為最小。這充分表明了所提算法的性能優(yōu)良且點(diǎn)云提取更為精確。同時(shí)該文算法的運(yùn)行時(shí)間最短,說明其效率較高。利用四種算法生成點(diǎn)云數(shù)據(jù)的直觀效果如圖7 所示。可以看到,該文算法生成的點(diǎn)云數(shù)據(jù)更為稠密,相較其他算法更符合實(shí)際情況。
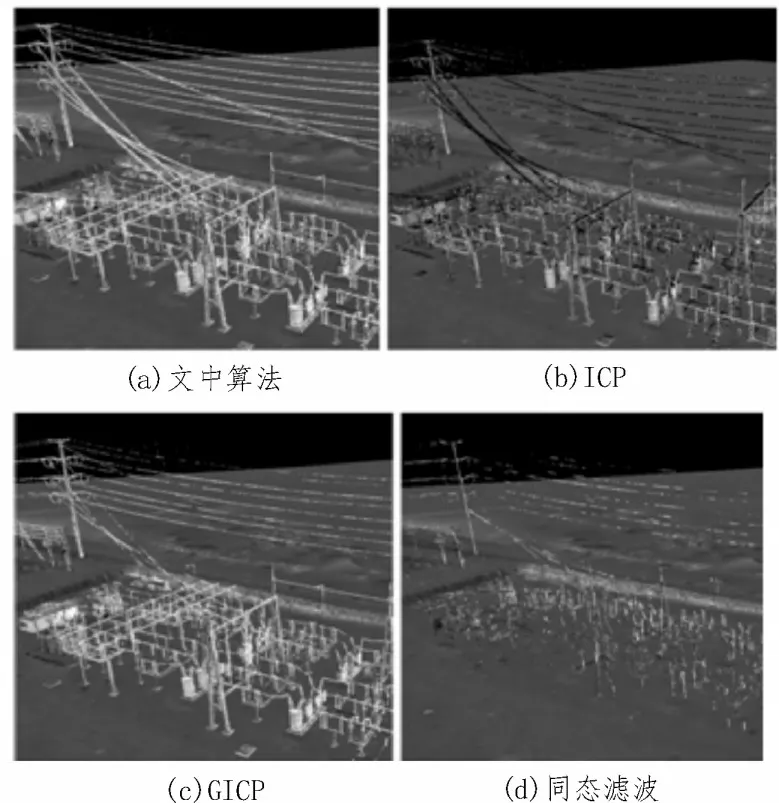
圖7 點(diǎn)云對比結(jié)果
此外,還對模型重建能力進(jìn)行驗(yàn)證,結(jié)果如圖8所示。從圖中可知,稀疏-稠密算法結(jié)合了數(shù)據(jù)的相關(guān)特性,能更優(yōu)地對原始點(diǎn)云稀疏點(diǎn)數(shù)據(jù)加以還原,且重建后的圖像可視化程度優(yōu)良。由此表明,所提重建算法可應(yīng)用于實(shí)際工程中。
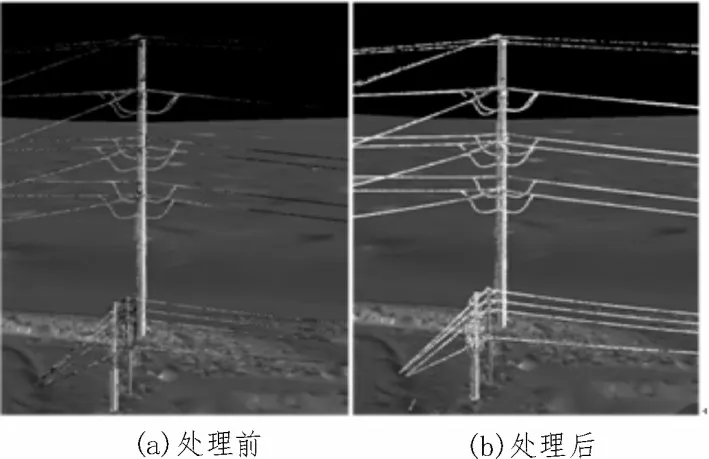
圖8 重建結(jié)果
4 結(jié)束語
輸電線路結(jié)構(gòu)完整性始終是電力工程管理部分的檢測重點(diǎn),但此項(xiàng)巡檢或驗(yàn)收任務(wù)僅依靠人力,存在諸多不便。文中基于激光雷達(dá)以及點(diǎn)云數(shù)據(jù)提出了一種輸電線路掃描重建算法,其采用索引樹近鄰搜索法對原始點(diǎn)云數(shù)據(jù)進(jìn)行預(yù)處理,以獲得重建后的點(diǎn)云數(shù)據(jù)。再通過稀疏-稠密算法進(jìn)行框架特征提取與填充,最終完成輸電線路內(nèi)容的重建。實(shí)驗(yàn)結(jié)果表明,該文算法的性能及效率皆為最優(yōu),且重建模型的可視化程度優(yōu)良。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
- 電子設(shè)計(jì)工程的其它文章
- 基于DN-YOLOv5 遙感目標(biāo)快速檢測方法
- 面向圖模聯(lián)調(diào)校核的GIS與配網(wǎng)圖形節(jié)點(diǎn)數(shù)據(jù)融合技術(shù)研究
- 面向醫(yī)學(xué)檢驗(yàn)數(shù)據(jù)分析的增強(qiáng)深度學(xué)習(xí)預(yù)測模型
- 基于極限學(xué)習(xí)機(jī)的超短期電力負(fù)荷度量研究
- 路面裂縫檢測與統(tǒng)計(jì)輔助系統(tǒng)設(shè)計(jì)
- 基于改進(jìn)SVM 算法的電力工程異常數(shù)據(jù)檢測方法設(shè)計(jì)