列車自主控制系統(tǒng)在道岔安全區(qū)域的控制算法
2024-02-23 00:38:30王延峰謝澤會
城市軌道交通研究 2024年1期
王延峰 謝澤會
(鄭州輕工業(yè)大學電氣信息工程學院, 450002, 鄭州)
隨著城市交通運行需求不斷提高,CBTC(基于通信的列車自動控制)系統(tǒng)逐步從以地面為中心的控制模式向以列車為中心的列車控制模式轉(zhuǎn)變。目前,法國阿爾斯通公司提出的下一代CBTC解決方案Urbalis Fluence,能克服現(xiàn)有基于地面無線通信的列車控制系統(tǒng)之局限性,可將列車間隔縮短到60 s[1]。我國的交控科技股份有限公司[2]、中國中車股份有限公司[3]、中國鐵道科學研究院集團有限公司[4-5]等科研企業(yè)對列車自主控制系統(tǒng)進行了設(shè)計和實踐。列車自主控制系統(tǒng)成為我國城市軌道交通領(lǐng)域重點發(fā)展內(nèi)容之一[6]。
列車在接近或行駛到一個道岔區(qū)段時,道岔的轉(zhuǎn)動可能產(chǎn)生列車脫軌等風險事故。CBTC系統(tǒng)對道岔的操作控制由安全完整性等級為SIL4級的聯(lián)鎖系統(tǒng)完成。聯(lián)鎖系統(tǒng)在辦理進路過程中,對道岔區(qū)段須采用嚴苛的檢查、邏輯判斷和鎖閉等一系列復雜的安全控制程序,存在對道岔區(qū)段資源分配效率不高的現(xiàn)象。列車自主控制系統(tǒng)取消了地面聯(lián)鎖系統(tǒng),使列車自主控制系統(tǒng)成為道岔的控制主動發(fā)起者。合理劃分道岔區(qū)段和安全高效地控制道岔轉(zhuǎn)動成為列車自主控制系統(tǒng)設(shè)計的關(guān)鍵點之一。
本文對以列車自主控制系統(tǒng)為對象,根據(jù)道岔轉(zhuǎn)換的特點和需求,定義道岔安全區(qū)域,采用新的道岔區(qū)段控制算法,在保證列車安全通過前提下進一步提升道岔區(qū)段通行效率。
1 列車自主控制系統(tǒng)的架構(gòu)
列車自主控制系統(tǒng)的架構(gòu)如圖1所示。該系統(tǒng)以列車為中心,由列車在行駛過程自主控制所需的進路資源,如軌道區(qū)段和道岔區(qū)段,系統(tǒng)架構(gòu)圖車載系統(tǒng)包括OR(車載天線)、ATP(列車自動保護)子系統(tǒng)、ATO(列車自動運行)子系統(tǒng)、里程計和應答器;地面系統(tǒng)包括RM(資源控制器)和軌旁設(shè)備。各部分功能如表1所示。
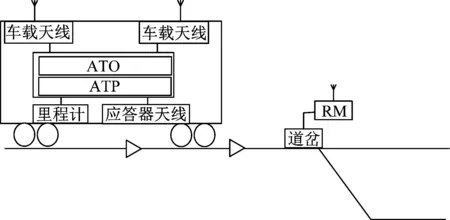
圖1 列車自主控制系統(tǒng)的架構(gòu)圖
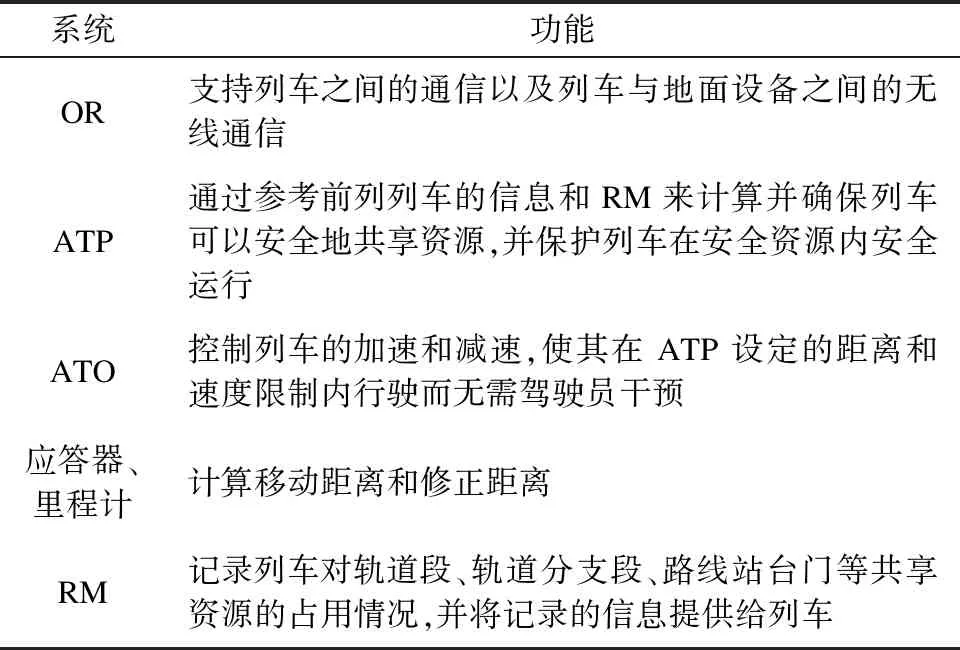
表1 列車自主控制系統(tǒng)的組成及功能
2 道岔安全區(qū)域控制算法
2.1 道岔安全區(qū)域
CBTC系統(tǒng)中的道岔區(qū)段根據(jù)聯(lián)鎖系統(tǒng)的控制需求,采用以地面為中心的安全防護邏輯,其劃分的道岔區(qū)段安全范圍過大。列車自主控制系統(tǒng)取消了地面安全防護系統(tǒng),將安全防護功能轉(zhuǎn)移到列車自主控制系統(tǒng),因此道岔區(qū)段可根據(jù)列車長度進行精準分割,將道岔轉(zhuǎn)動部分減少至道岔安全區(qū)域。
將道岔SA(安全區(qū)域)作為RM中的一個信號量區(qū)域進行管理,其長度控制為一列列車的長度,如圖2所示。其中,SA起點坐標為PPB,終點坐標為PRSFP和PNSFP(PRSFP和PNSFP處為警沖標在兩邊鋼軌的投影垂直點),Dp為警沖標距離軌道中心線距離。
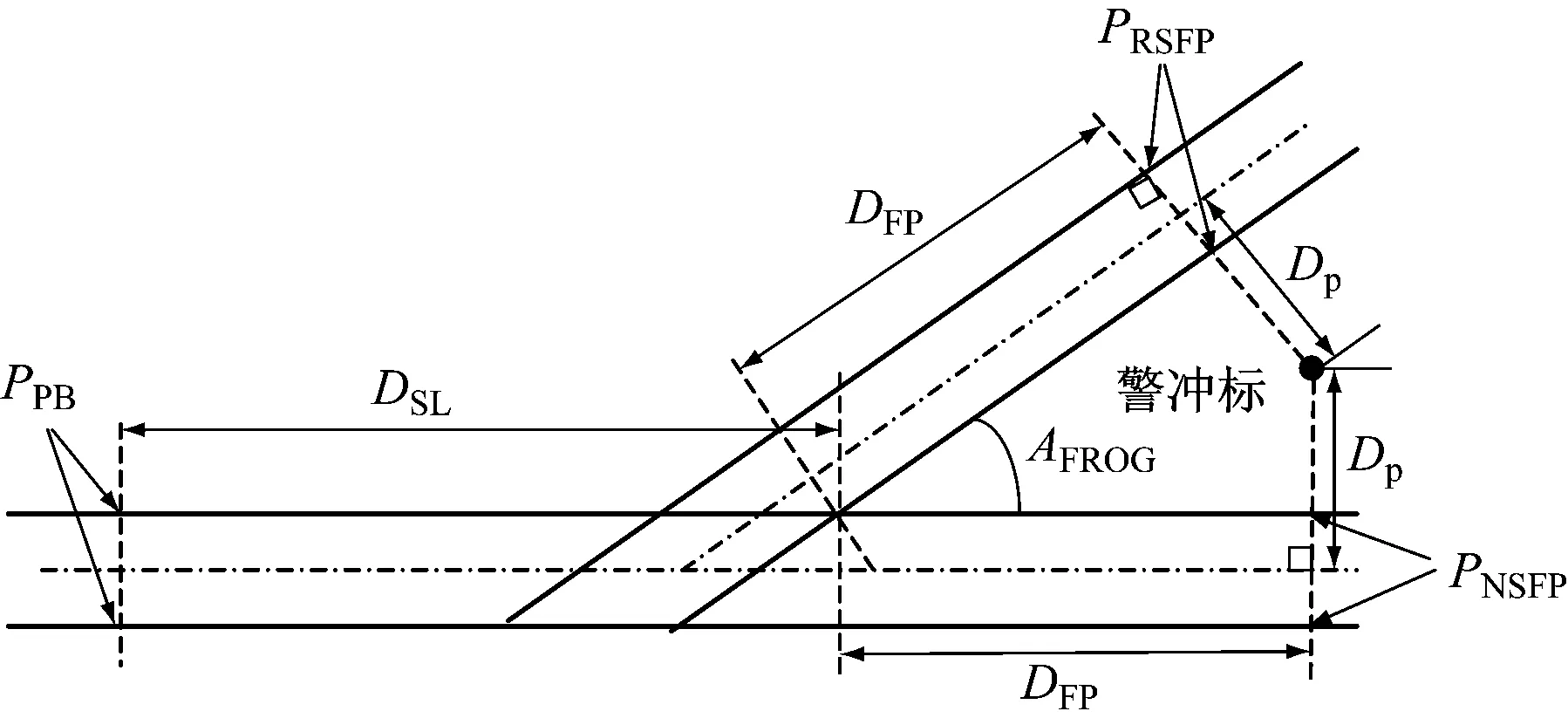
注:DSL—道岔叉心到道岔區(qū)段絕緣節(jié)的長度;DFP—道岔叉心到PRSFP或PNSFP的長度;AFROG—道岔角度。
結(jié)合圖2可知:
(1)
式中:
DT——列車寬度;
DC、DD、DE——在道岔安全區(qū)域內(nèi)的前、后和側(cè)面的列車動態(tài)輪廓界限值。
道岔安全區(qū)域長度可用PPB-PRSFP和PPB-PNSFP表示,即:
(2)
式中:
DSWA——道岔安全區(qū)域長度;
DTRW——軌道寬度。
2.2 道岔安全區(qū)域邏輯向量
道岔安全區(qū)域的邏輯向量由6個變量構(gòu)成,表示為[道岔 ID,參考TAG ID,道岔位置定/反位,道岔區(qū)域起始長度,道岔反位長度,道岔定位長度]。
不同道岔類型的道岔安全區(qū)域如圖3所示。圖3中,S、X、Y、Z為道岔的不同軌編號,P1、P2為轉(zhuǎn)轍機編號,TAG#M、TAG#K、TAG#N為道岔的不同接入點,d1、d2、d3分別為道岔安全區(qū)域SA1的起始長度、道岔反位長度及道岔定位長度、d4、d5、d6分別為道岔安全區(qū)域SA2的起始長度、道岔反位長度及道岔定位長度。

a) 單動道岔
以圖3 a)的單動道岔為例,根據(jù)轉(zhuǎn)轍機P1的操作,可能產(chǎn)生S?P1?Y或S?P1?Z方向的進路。S?P1?Y為道岔反位,S?P1?Z為道岔定位。由上文結(jié)合圖3 a)可知,SA1的邏輯模型表示為[P1,TAG #K,定位,d1,d2,d3]。道岔定位和反位的SA1分別定義為TAG#K?P1?TAG#N和TAG#K?P1?TAG#M。
圖3 b)為雙動道岔。列車自主控制系統(tǒng)可對單個道岔進行操作。SA2的邏輯模型表示為[P2,TAG#L,反位,d4,d5,d6]。道岔定位和反位的SA2分別定義為TAG#L?P2?TAG#U和TAG#L?P2?TAG#M。
2.3 道岔安全區(qū)域控制算法
圖4為交叉道岔區(qū)段列車自主控制系統(tǒng)在道岔安全區(qū)域的信息交互。圖4中,列車T1在站臺N出發(fā)后改變方向,準備沿Z→P3→P4→S方向進路運行(P3、P4為轉(zhuǎn)轍機編號),T2在X→P1→P2→Y方向進路運行并準備停靠站臺M。圖4中列車自主控制系統(tǒng)的控制算法如下:
圖4 交叉道岔區(qū)段列車自主控制系統(tǒng)在道岔安全區(qū)域的信息交互
1) 列車T2檢查通過RM運行X→P1→P2→Y路線所需的資源狀態(tài)。然后,鎖閉軌道區(qū)段O、Q、E和道岔安全區(qū)域SA1和SA2,并向轉(zhuǎn)轍機P1和P2發(fā)送轉(zhuǎn)動到反位的控制命令。
2) RM收到列車T2的操縱道岔指令,將轉(zhuǎn)轍機P1、P2轉(zhuǎn)動到反位。
3) RM向列車T2發(fā)送轉(zhuǎn)轍機轉(zhuǎn)換到位以及資源占用狀態(tài)。
4) 列車T2沿X→P1→P2→Y行駛。
5) 列車T1檢查通過RM運行Z→P3→P4→S路線所需的資源狀態(tài)——道岔安全區(qū)域SA3及SA4,以及軌道區(qū)段R及C,并記錄在RM中。列車T1向RM發(fā)送轉(zhuǎn)轍機P3及P4轉(zhuǎn)動到反位的操作命令。
6) RM接收列車T1的操作道岔指令,將轉(zhuǎn)轍機P3及P4轉(zhuǎn)動到反位。
7) RM向列車T1發(fā)送道岔P3轉(zhuǎn)換完成信息及資源占用狀態(tài)信息。
8) 列車T1行駛到SA3的終點,須等待列車T2解除軌道交叉區(qū)段Q的占用狀態(tài)。
9) 列車T1向RM查詢交叉區(qū)段Q狀態(tài)。
10) RM向列車T1發(fā)送軌道交叉區(qū)段Q資源占用狀態(tài)和安全狀態(tài)信息。
11) 列車T1通過交叉區(qū)段Q行駛到區(qū)段R。
3 列車自主控制系統(tǒng)的道岔區(qū)段場景
3.1 單開道岔運行場景
列車T1和列車T2,以相同速度運行到單開道岔區(qū)間后分離行駛。單開道岔區(qū)段運行場景如圖5所示。列車T1和列車T2沿S→Y方向以最小間隔運行。為了與CBTC系統(tǒng)比較控制算法的性能,假設(shè)CBTC和列車自主控制系統(tǒng)的列車具有相同控制參數(shù),以相同的最小間隔運行。

注:DMSD—列車間最小距離;DTL—列車長度;DTRL—道岔區(qū)段長度;DTS—兩條軌道中心線的間距。
在CBTC系統(tǒng)控制的運行場景下,從列車T1進入道岔區(qū)段DTRL開始,直到列車T1尾部完全離開道岔區(qū)段,列車T2無法進入道岔區(qū)段。當列車T1完全出清道岔區(qū)段后,列車T2才可進入道岔區(qū)段。
在列車自主控制系統(tǒng)控制的運行場景下,列車T1進入道岔安全區(qū)域SA1后,列車T2則無法使用資源道岔安全區(qū)域SA1。當列車T1的尾部完全出清SA1后,列車T2才可進入道岔安全區(qū)域SA1。由圖可知,列車自主控制系統(tǒng)控制資源單位——道岔安全區(qū)域SA1的范圍要小于CBTC系統(tǒng)聯(lián)鎖安全防護的道岔區(qū)段長度DTRL。
DMSD同列車T2的緊急制動加速度aGT2相關(guān),可以表示為:
DMSD=[(vT2+ve+aT2teGEBR)2-(vT2+ve)2]/2aT2+
(vT2+ve+aT2teGEBR)2/2aGT2+DPU
(3)
式中:
vT2——列車T2當前速度;
ve——車速傳感器的速度誤差;
aT2——列車T2的最大加速度;
teGEBR——GEBR(緊急制動率)等效制動的延遲輸出時間;
DPU——列車的不確定性距離。
在CBTC系統(tǒng)控制情況下,列車 T1和列車T2之間的安全距離DCBTC為列車T1尾部完全離開道岔區(qū)段時2列列車間距離最大值,即:
DCBTC=DMSD+DTL+DTRL-(vT2-ve)2/2aT2-[vT2-
ve-aFT2(DTRL+DTL)/(vT1-ve)]2/2aT2
(4)
式中:
vT1——列車T1當前速度;
aFT2——列車T2的全制動加速度。
在列車自主控制系統(tǒng)控制情況下,列車T1和T2的安全間隔DATCS表示為:
DATCS=DMSD+DTL+DSWA-(vT2-ve)2/2aT2-[vT2-
ve-aFT2(DTRL+DTL)/(vT1-ve)]2/2aT2
(5)
3.2 交叉道岔運行場景
交叉道岔區(qū)段運行場景如圖6所示。列車T1往Z→P3→P4→S方向行駛,列車T2行駛進路為X→P1→P2→Y。
注:DPL—站臺長度;DX2P—安裝彎道到站臺的軌道段長度;DXM—彎道末端至末端的長度。
在CBTC系統(tǒng)控制的運行場景中, 在列車T1的尾部完全離開長度為DTRL的道岔區(qū)段前,列車T2只能在道岔區(qū)段外的軌道區(qū)段等待。只有列車T1完全出清道岔區(qū)段后,列車T2才可進入道岔區(qū)段,并最終停靠在站臺M。列車T1行駛距離DeT1為:
DeT1=DPL+DX2P+2DXM+DCX
(6)
式中:
DCX——從P3到P4的對角線方向長度。
DCX和DXM分別表示為:
DCX=csc(AFROG)DTS
(7)
DXM=[DTRL-cos(AFROG)DCX]/2
(8)
列車T1的道岔通過時間teT1CBTC為:
(9)
式中:
aT1——列車T1的加速度。
列車T2行駛停靠到站臺M所需時間teT2CBTC為:
(10)
式中:
aT2——列車T2的加速度;
DaT2——列車T2的行駛里程;
adT2——列車T2的制動加速度;
tthrow——道岔轉(zhuǎn)動并鎖閉的時間。
列車自主控制系統(tǒng)控制過程如2.3節(jié)所述,列車T1進路可以分為兩部分:從站臺N到道岔安全區(qū)段SA4的距離DeT1ATCS-1和經(jīng)過交叉段Q后到達終點S經(jīng)過的距離DeT1ATCS-2,分別表示為:
DeT1ATCS-1=DX2P+DXM+DSWA
(11)
DeT1ATCS-2=DB+DSWA+DXM+DTL
(12)
式中:
DB——軌道交叉段B的長度。
列車T1的道岔通過時間teT1ATCS可以表示為:
(13)
式中:
twait——列車T2完全通過軌道交叉段Q期間,列車T1在交匯區(qū)SA3末端等待的時間;
adT1——列車T1的制動加速度。
4 系統(tǒng)仿真
4.1 仿真參數(shù)
為了對比CBTC系統(tǒng)和列車自主控制系統(tǒng)在單開道岔區(qū)段和交叉道岔區(qū)段兩個場景的運行性能,采用地鐵A型車規(guī)格[7]和9號道岔作為仿真對象,車輛和道岔仿真試驗參數(shù)如表2所示。
表2 車輛和道岔仿真試驗參數(shù)
4.2 單開道岔運行場景性能分析
對圖5中2列列車通過單開道岔的場景進行仿真。在CBTC系統(tǒng)中,列車T1以最大速度通過道岔區(qū)段,列車T2須等待列車T1尾部完全出清道岔區(qū)段;而在列車自主控制系統(tǒng)中,列車T2只需在列車T1完全離開SA部分后即可繼續(xù)行駛。將列車T1和列車T2的安全間隔作為效率提升評價指標,列車自主控制系統(tǒng)在單開道岔區(qū)段運行場景安全間隔提升效率如圖7所示。
圖7 列車自主控制系統(tǒng)在單開道岔區(qū)段運行場景安全間隔提升效率
由圖7可知,安全間隔提升效率隨著列車緊急制動加速度的增大而減小,而加速度對安全間隔提升效率影響較小。在列車常規(guī)參數(shù)下,自主控制系統(tǒng)相比CBTC系統(tǒng)的安全間隔提升效率都有所提升,最大提升74.5%。
4.3 交叉道岔運行場景性能分析
對圖 6中2列列車通過交叉道岔的場景進行仿真。將列車T1和列車T2從起始點出發(fā)到達目的點所需時間作為道岔通過時間提升效率評價指標,得到列車自主控制系統(tǒng)在交叉道岔區(qū)段運行場景道岔通過時間的提升效率如圖8所示。通過圖8即可定量評估列車制動加速度和加速度對道岔通過時間提升效率的影響。
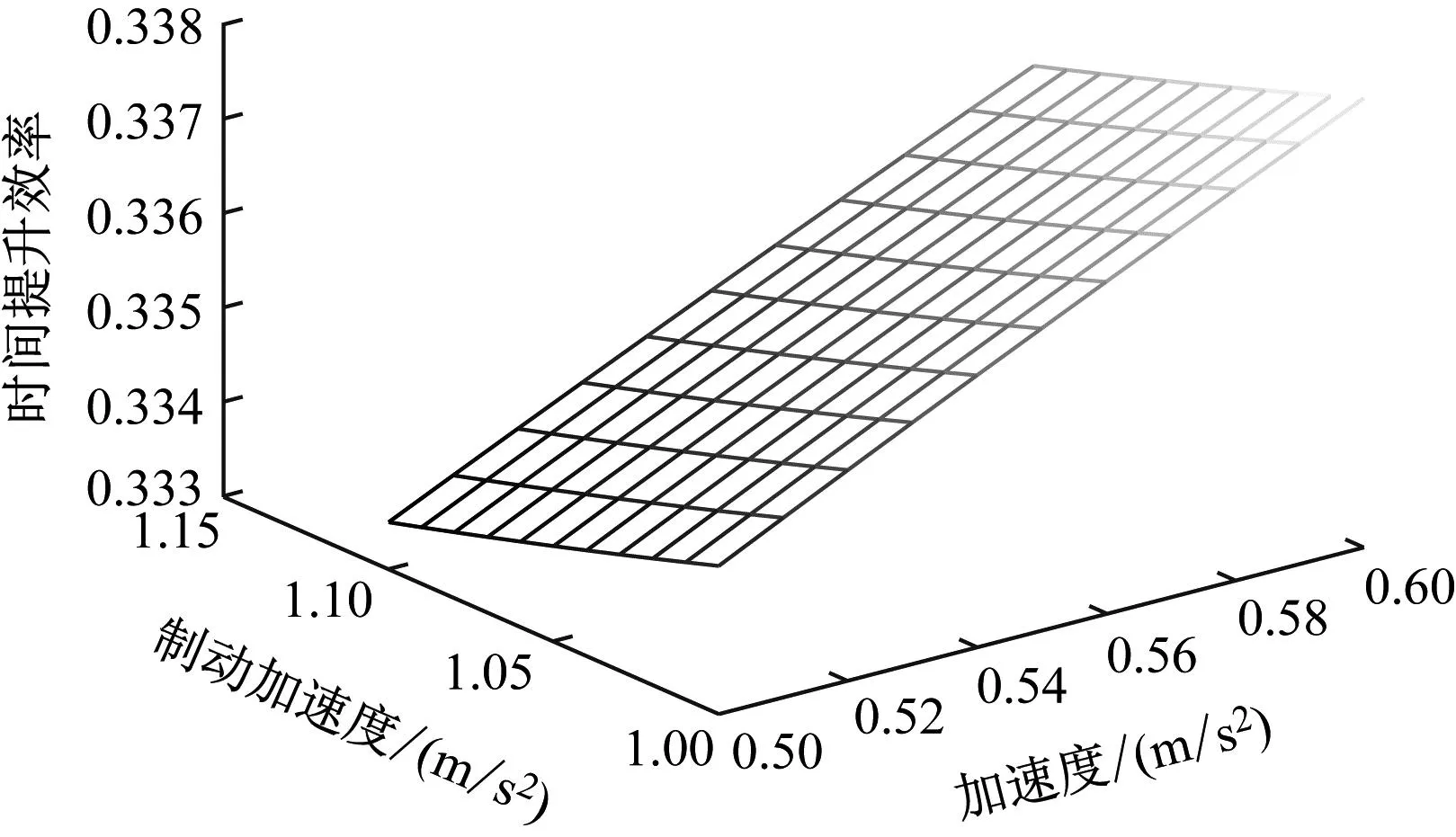
圖8 列車自主控制系統(tǒng)在交叉道岔區(qū)段運行場景效率提升率
由圖8可知,道岔通過時間的提升效率隨著列車加速度的增加而增長,而制動加速度對道岔通過時間提升效率較小。在列車常規(guī)參數(shù)下,相比CBTC系統(tǒng),列車自主控制系統(tǒng)的道岔通過時間都有所提升,最大提升33.8%。
5 結(jié)語
為了安全高效的列車運行,定義道岔安全區(qū)域為列車自主控制系統(tǒng)在道岔區(qū)段控制的資源,提出道岔控制算法,并在單開道岔區(qū)段和交叉道岔區(qū)段兩種常見的城市軌道交通運營場景進行了資源利用效率定量分析。
仿真結(jié)果證明,與現(xiàn)有的CBTC系統(tǒng)相比,列車自主控制系統(tǒng)的安全間隔和道岔通過時間效率有所提升。本研究可為列車自主控制系統(tǒng)的設(shè)計提供參考。在具體工程應用過程中,應結(jié)合具體項目特點進行適應性分析,實現(xiàn)效率安全可靠的提升。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數(shù)理化(高中版.高考數(shù)學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛(wèi)生(2014年11期)2014-11-12 13:11:32