含實(shí)時(shí)電流補(bǔ)償?shù)拈_關(guān)磁阻式機(jī)電作動(dòng)器自適應(yīng)PI控制
2024-02-20 11:52:26龍?jiān)?/span>杜錦華布家寶梁得亮
西安交通大學(xué)學(xué)報(bào) 2024年2期
龍?jiān)?杜錦華,布家寶,梁得亮,2
(1. 西安交通大學(xué)電力設(shè)備電氣絕緣國(guó)家重點(diǎn)實(shí)驗(yàn)室,710049,西安;2. 西安交通大學(xué)陜西省智能電網(wǎng)重點(diǎn)實(shí)驗(yàn)室,710049,西安)
氣墊登陸艇具有強(qiáng)大的遠(yuǎn)程突襲能力,是現(xiàn)代兩棲作戰(zhàn)的核心技術(shù)裝備[1-2]。轉(zhuǎn)向葉片控制系統(tǒng)是氣墊登陸艇的航向控制設(shè)備,對(duì)氣墊登陸艇的機(jī)動(dòng)性有著重要影響,其傳統(tǒng)動(dòng)力來源是液壓作動(dòng)器。近年來,考慮到液壓作動(dòng)器的控制精度和靈活性較差[3],使用機(jī)電作動(dòng)器替代液壓作動(dòng)器具有良好的應(yīng)用前景,其可以提高轉(zhuǎn)向葉片系統(tǒng)的操控性,并降低系統(tǒng)復(fù)雜性和維護(hù)成本[4]。
目前機(jī)電作動(dòng)器多采用永磁同步電機(jī)驅(qū)動(dòng)[5-7],但永磁同步電機(jī)中含有永磁體,極易因戰(zhàn)爭(zhēng)環(huán)境中的高溫和爆炸沖擊發(fā)生退磁或者碎裂而失效[8-9]。相比于永磁同步電機(jī),開關(guān)磁阻電機(jī)不含永磁體,其堅(jiān)固的結(jié)構(gòu)和天然的容錯(cuò)性可以提高系統(tǒng)在戰(zhàn)爭(zhēng)環(huán)境中的生存能力[10-11],因此氣墊登陸艇的轉(zhuǎn)向葉片系統(tǒng)更傾向于使用由開關(guān)磁阻電機(jī)驅(qū)動(dòng)的機(jī)電作動(dòng)器。不過開關(guān)磁阻電機(jī)的雙凸極結(jié)構(gòu)也使得電機(jī)存在很強(qiáng)的非線性和轉(zhuǎn)矩脈動(dòng)[12-13],且無法像永磁同步電機(jī)那樣通過坐標(biāo)變換解耦成線性系統(tǒng)進(jìn)行控制[14],導(dǎo)致開關(guān)磁阻式機(jī)電作動(dòng)器的位置跟蹤控制更為困難。
目前開關(guān)磁阻式機(jī)電作動(dòng)器的位置跟蹤控制方法可大體上分為兩類:經(jīng)典的比例積分微分(PID)控制及其改進(jìn)算法;基于現(xiàn)代控制理論和智能控制理論的新型控制方法。關(guān)于第1類控制方法,文獻(xiàn)[15]首先使用三閉環(huán)比例積分(PI)控制器,驗(yàn)證了開關(guān)磁阻電機(jī)應(yīng)用于機(jī)電作動(dòng)器的可行性;在該方法的基礎(chǔ)上,文獻(xiàn)[16]提出了一種基于增益調(diào)度調(diào)節(jié)器的PID控制器,并通過階躍響應(yīng)實(shí)驗(yàn)驗(yàn)證了該控制器的有效性,不過其增益調(diào)度調(diào)節(jié)器的設(shè)計(jì)略顯復(fù)雜,且沒有考慮負(fù)載擾動(dòng)的影響。關(guān)于第2類控制方法,已有學(xué)者將模糊控制和迭代學(xué)習(xí)控制應(yīng)用于開關(guān)磁阻式機(jī)電作動(dòng)器的位置跟蹤控制[17-18],并顯示出良好的控制效果。不過模糊控制的效果依賴于模糊規(guī)則知識(shí)庫(kù),知識(shí)庫(kù)的獲取對(duì)于工程經(jīng)驗(yàn)不足的設(shè)計(jì)者是個(gè)挑戰(zhàn);而迭代學(xué)習(xí)控制更加適用于具有重復(fù)運(yùn)動(dòng)特點(diǎn)的被控系統(tǒng),不太適用于跟蹤位置變化劇烈且隨機(jī)的轉(zhuǎn)向葉片系統(tǒng)。文獻(xiàn)[19]針對(duì)開關(guān)磁阻電機(jī)的位置跟蹤控制提出了一種自適應(yīng)反演控制方法,在跟蹤正弦位置信號(hào)時(shí)取得了良好的控制效果。這種方法的核心是直接轉(zhuǎn)矩控制,需要查找開關(guān)表,運(yùn)算量較大。近年來,一些學(xué)者將自抗擾控制和模型預(yù)測(cè)控制應(yīng)用于機(jī)電作動(dòng)器的位置跟蹤控制[20-22],取得了理想的控制效果。自抗擾控制通過擴(kuò)張狀態(tài)觀測(cè)器對(duì)系統(tǒng)的總擾動(dòng)進(jìn)行觀測(cè),從而將控制對(duì)象轉(zhuǎn)化為二階積分器使用比例微分(PD)控制器進(jìn)行控制,方法較為簡(jiǎn)單[23]。不過開關(guān)磁阻電機(jī)的非線性特性導(dǎo)致電機(jī)的模型信息難以被控制器利用,會(huì)導(dǎo)致擴(kuò)張觀測(cè)器的帶寬較高,參數(shù)整定困難;模型預(yù)測(cè)控制同樣依賴系統(tǒng)的模型信息而且計(jì)算量較大,對(duì)控制芯片的性能要求較高,這些問題制約了兩種控制器在實(shí)際工程中的應(yīng)用。
為兼顧開關(guān)磁阻式機(jī)電作動(dòng)器的位置跟蹤性能和工程應(yīng)用的可靠性與可行性,本文提出了一種含實(shí)時(shí)電流補(bǔ)償和自適應(yīng)PI控制器。該控制器在電流環(huán)設(shè)計(jì)了基于負(fù)載觀測(cè)器的實(shí)時(shí)電流補(bǔ)償環(huán)節(jié)來提高系統(tǒng)的抗擾性能;在轉(zhuǎn)速環(huán)采用自適應(yīng)PI來削弱開關(guān)磁阻電機(jī)的非線性,從而提高機(jī)電作動(dòng)器中開關(guān)磁阻電機(jī)的轉(zhuǎn)速調(diào)節(jié)性能;并在位置環(huán)引入前饋環(huán)節(jié)來提高機(jī)電作動(dòng)器的響應(yīng)速度。相比于常規(guī)PI控制器,所提控制器的運(yùn)算量增加不大,工程適用性較好。最后,通過仿真與實(shí)驗(yàn)對(duì)比分析了4種位置控制器的性能,證明了所提控制器能有效控制開關(guān)磁磁阻式機(jī)電作動(dòng)器進(jìn)行位置跟蹤,且相比于其他3種控制器響應(yīng)速度更快,位置跟蹤精度更高。
1 轉(zhuǎn)向葉片系統(tǒng)的數(shù)學(xué)模型
氣墊登陸艇的轉(zhuǎn)向葉片系統(tǒng)如圖1所示,主要包括作動(dòng)器,轉(zhuǎn)向葉片以及推進(jìn)風(fēng)扇。系統(tǒng)通過作動(dòng)器驅(qū)動(dòng)轉(zhuǎn)向葉片偏轉(zhuǎn)來改變推進(jìn)風(fēng)扇的氣流方向,從而控制氣墊登陸艇的行進(jìn)方向。

圖1 氣墊登陸艇的轉(zhuǎn)向葉片系統(tǒng)Fig.1 The steering vane system of the LCAC
轉(zhuǎn)向葉片系統(tǒng)的工作原理如圖2所示。其中開關(guān)磁阻式機(jī)電作動(dòng)器主要由開關(guān)磁阻電機(jī)、滾珠絲杠副、端環(huán)、旋轉(zhuǎn)變壓器和線性可變差動(dòng)變壓器(LVDT)組成,其中旋轉(zhuǎn)變壓器用來測(cè)量開關(guān)磁阻電機(jī)的轉(zhuǎn)速和轉(zhuǎn)角,LVDT 變壓器用來測(cè)量作動(dòng)器端環(huán)的直線位移。機(jī)電作動(dòng)器的端環(huán)通過搖臂與轉(zhuǎn)向葉片連接,其直線位移決定了轉(zhuǎn)向葉片的偏角。為描述轉(zhuǎn)向葉片系統(tǒng)的主要特征,忽略間隙,彈性形變等非線性因素的影響,轉(zhuǎn)向葉片系統(tǒng)中開關(guān)磁阻式機(jī)電作動(dòng)器的數(shù)學(xué)模型如下。
機(jī)電作動(dòng)器中開關(guān)磁阻電機(jī)的數(shù)學(xué)模型
(1)
式中:U、R、ik和ψk分別為開關(guān)磁阻電機(jī)的電壓、相電阻、第k相的電流和磁鏈;Te、θ、ω、Jm、Bm分別為開關(guān)磁阻電機(jī)的電磁轉(zhuǎn)矩、轉(zhuǎn)動(dòng)角度、轉(zhuǎn)動(dòng)速度、轉(zhuǎn)動(dòng)慣量和旋轉(zhuǎn)阻尼系數(shù)。
機(jī)電作動(dòng)器中滾珠絲杠副的數(shù)學(xué)模型
(2)

轉(zhuǎn)向葉片系統(tǒng)的負(fù)載模型
(3)

由于轉(zhuǎn)向葉片的偏轉(zhuǎn)角度較小,所以其偏轉(zhuǎn)角度和機(jī)電作動(dòng)器的位移約成正比,即
φ=σx
(4)
式中:σ為偏轉(zhuǎn)角度和作動(dòng)器位移間的比例系數(shù)。
綜合式(1)~(4),可得機(jī)電作動(dòng)器的數(shù)學(xué)模型
(5)

2 位置控制器設(shè)計(jì)及其參數(shù)整定


圖3 開關(guān)磁阻式機(jī)電作動(dòng)器控制框圖Fig.3 The control block diagram of the SRM-based EMA
2.1 含實(shí)時(shí)電流補(bǔ)償?shù)碾娏髡{(diào)節(jié)器


圖4 含實(shí)時(shí)電流補(bǔ)償?shù)碾娏鳝h(huán)的控制框圖 Fig.4 The control block diagram of the current loop with the real-time current compensation
2.1.1 電流斬波控制環(huán)節(jié)設(shè)計(jì)
(6)
式中:Tc為延遲時(shí)間;Lmax、Lmin分別為開關(guān)磁阻電機(jī)定轉(zhuǎn)子齒在對(duì)齊和不對(duì)齊位置時(shí)的相電感;IN為開關(guān)磁阻電機(jī)的額定電流值。
2.1.2 實(shí)時(shí)電流補(bǔ)償環(huán)節(jié)設(shè)計(jì)
電流實(shí)時(shí)補(bǔ)償環(huán)節(jié)需要使用負(fù)載觀測(cè)器得到施加于轉(zhuǎn)向葉片上的空氣動(dòng)力值。其表達(dá)式為
(7)

(8)
相比于不含電流補(bǔ)償?shù)某R?guī)PI控制器,在對(duì)電流環(huán)的給定電流進(jìn)行實(shí)時(shí)補(bǔ)償后,機(jī)電作動(dòng)器的階躍響應(yīng)曲線和伯德圖分別如圖5、圖6所示。
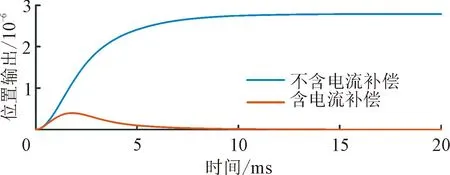
圖5 機(jī)電作動(dòng)器中負(fù)載擾動(dòng)的階躍響應(yīng)曲線Fig.5 The step response curve of the load disturbance

圖6 機(jī)電作動(dòng)器中負(fù)載擾動(dòng)的伯德圖Fig.6 The Bode diagram of the load disturbance
圖5表明含電流補(bǔ)償?shù)奈恢每刂破飨啾扔诓缓娏餮a(bǔ)償?shù)奈恢每刂破?由負(fù)載擾動(dòng)引起的位置變化很小。圖6所示的伯德圖進(jìn)一步證明了該現(xiàn)象,圖中含實(shí)時(shí)電流補(bǔ)償?shù)目刂破鞯姆邓p更大,相位滯后更小,表明基于負(fù)載觀測(cè)器的實(shí)時(shí)電流補(bǔ)償環(huán)節(jié)可以降低負(fù)載擾動(dòng)對(duì)位置跟蹤的影響。
2.2 基于自適應(yīng)PI控制的轉(zhuǎn)速調(diào)節(jié)器
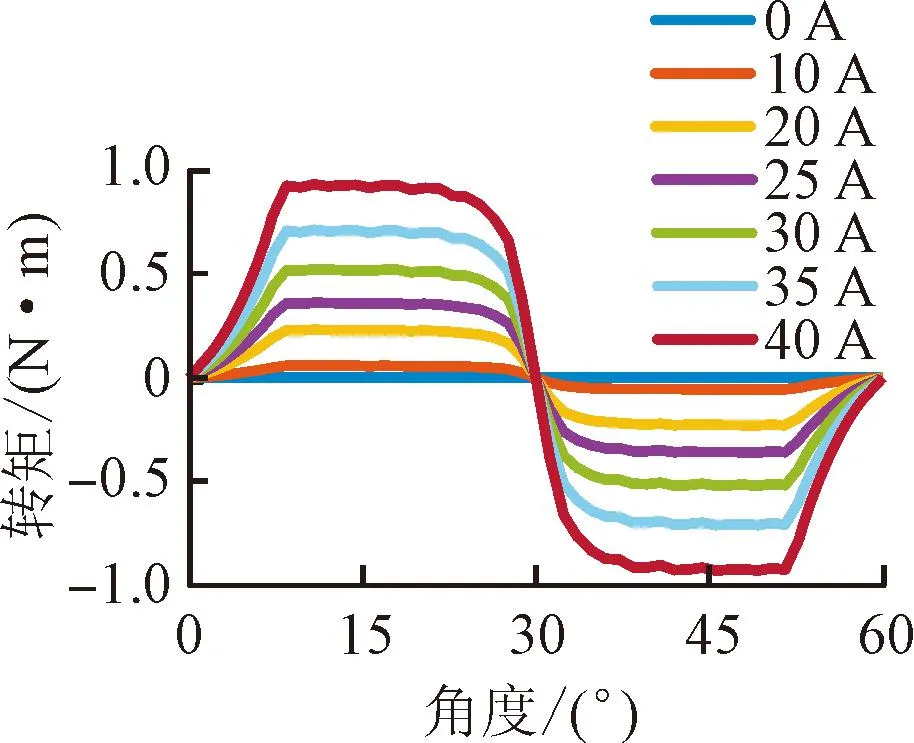
機(jī)電作動(dòng)器所用開關(guān)磁阻電機(jī)的轉(zhuǎn)矩與電流和轉(zhuǎn)角的關(guān)系如圖7(a)所示,可知當(dāng)開關(guān)磁阻電機(jī)的轉(zhuǎn)角處于9°~24°時(shí),即電機(jī)轉(zhuǎn)子齒與定子齒基本對(duì)齊時(shí),電機(jī)的轉(zhuǎn)矩基本穩(wěn)定。由于電流斬波控制器的開通關(guān)斷角恒定,因此開關(guān)磁阻電機(jī)的轉(zhuǎn)矩只與電流相關(guān)。取轉(zhuǎn)角9°~24°的轉(zhuǎn)矩平均值來表示電流所對(duì)應(yīng)的轉(zhuǎn)矩,可得開關(guān)磁阻電機(jī)平均轉(zhuǎn)矩與電流間的關(guān)系如圖7(b)所示。
(a)轉(zhuǎn)矩-電流-轉(zhuǎn)角曲線

(b)平均轉(zhuǎn)矩-電流曲線
通過多項(xiàng)式擬合方法,可得機(jī)電作動(dòng)器中開關(guān)磁阻電機(jī)的轉(zhuǎn)矩-電流表達(dá)式
Te=Kti=(ai+b)i
(9)
式中Kt不是一個(gè)常數(shù),而是一個(gè)與電機(jī)實(shí)時(shí)電流值相關(guān)的變量,故可用Kt(i)表示。
為了提高機(jī)電作動(dòng)器的轉(zhuǎn)速調(diào)節(jié)性能,轉(zhuǎn)速調(diào)節(jié)器采用自適應(yīng)PI來削弱開關(guān)磁阻電機(jī)的非線性。具體方法是基于開關(guān)磁阻電機(jī)的實(shí)時(shí)反饋電流對(duì)比例參數(shù)Kω進(jìn)行自適應(yīng)調(diào)節(jié),將其轉(zhuǎn)化為一個(gè)與電流相關(guān)的量Kω(i),從而抵消變量Kt(i)的影響。基于上述分析可得轉(zhuǎn)速環(huán)的控制框圖如圖8所示,圖中Gc(s)為電流環(huán)的傳遞函數(shù),Gm(s)為開關(guān)磁阻電機(jī)的電磁轉(zhuǎn)矩與轉(zhuǎn)速的傳遞函數(shù),記為
Gm(s)=1/(Jms+Bm)=Km/(Tms+1)
(10)
式中:Km=1/Bm;Tm=Jm/Bm;G2(s)為轉(zhuǎn)速采樣環(huán)節(jié),將其視為延遲環(huán)節(jié),記為G2(s)=1/(T0s+1),其中T0為轉(zhuǎn)速采樣的延遲時(shí)間。轉(zhuǎn)速調(diào)節(jié)器GASR(s)采用自適應(yīng)PI控制,傳遞函數(shù)記為
(11)
式中:Kω(i)、τω分別為比例系數(shù)和積分系數(shù)。

圖8 機(jī)電作動(dòng)器轉(zhuǎn)速環(huán)的控制框圖Fig.8 The control block diagram of the speed loop
上述參數(shù)中,Kω(i)、Kt(i)的值均為和開關(guān)磁阻電機(jī)實(shí)時(shí)電流相關(guān)的變量。將轉(zhuǎn)速環(huán)中除轉(zhuǎn)速調(diào)節(jié)器GASR(s)外的環(huán)節(jié)合并,可得機(jī)電作動(dòng)器轉(zhuǎn)速環(huán)控制對(duì)象的開環(huán)傳遞函數(shù)
Gω(s)=Gc(s)Kt(i)Gm(s)G2(s)=
(12)
式(12)中,由于Tc、T0遠(yuǎn)小于Tm,故將電流和轉(zhuǎn)速采樣環(huán)節(jié)合并,使TΣ=Tc+T0。因?yàn)樵谖恢酶櫩刂浦幸筠D(zhuǎn)速調(diào)節(jié)的快速性較好,故令τω=Tm,從而使轉(zhuǎn)速調(diào)節(jié)器中的τωs+1項(xiàng)抵消開關(guān)磁阻電機(jī)的大慣性環(huán)節(jié)Tms+1。這樣便把轉(zhuǎn)速環(huán)校正為典型的Ⅰ型系統(tǒng),其開環(huán)傳遞函數(shù)可改寫為
(13)
式中:Kw=KmKt(i)Kω(i)/τω。根據(jù)文獻(xiàn)[25]給出的工程參數(shù)整定法,系統(tǒng)阻尼比為0.707時(shí),系統(tǒng)可以較好地兼顧轉(zhuǎn)速響應(yīng)的快速性和超調(diào),此時(shí)KwTΣ=0.5,故參數(shù)Kω(i)的值為
(14)

圖9 機(jī)電作動(dòng)器中轉(zhuǎn)速環(huán)的階躍響應(yīng)曲線Fig.9 The step response curve of speed loop
相比于恒定參數(shù)的常規(guī)PI控制器,在考慮開關(guān)磁阻電機(jī)的非線性特性并使用自適應(yīng)PI控制器對(duì)轉(zhuǎn)速進(jìn)行調(diào)節(jié)后,開關(guān)磁阻電機(jī)轉(zhuǎn)速的階躍響應(yīng)曲線和伯德圖分別如圖9、圖10所示。從圖9可以看出,PI控制器和自適應(yīng)PI控制器都可以使轉(zhuǎn)速的階躍響應(yīng)不出現(xiàn)超調(diào)現(xiàn)象,但自適應(yīng)PI相比于常規(guī)PI控制器的響應(yīng)速度更快,并在電機(jī)的電流為10、30 A時(shí),轉(zhuǎn)速響應(yīng)性能幾乎相同,而PI控制器的轉(zhuǎn)速響應(yīng)性能在兩個(gè)電流狀態(tài)下存在明顯差別。從圖10可以看出,自適應(yīng)PI控制器對(duì)轉(zhuǎn)速的控制性能受電流大小的影響很小,而且幅值衰減和相位滯后都更小。因此,自適應(yīng)PI可以有效削弱開關(guān)磁阻電機(jī)非線性特性對(duì)機(jī)電作動(dòng)器轉(zhuǎn)速控制的不利影響,且相比于常規(guī)PI控制器具有更快的轉(zhuǎn)速響應(yīng)性能。

圖10 機(jī)電作動(dòng)器中轉(zhuǎn)速環(huán)的伯德圖Fig.10 The Bode diagram of EMA speed loop
2.3 含前饋環(huán)節(jié)的位置調(diào)節(jié)器
根據(jù)所設(shè)計(jì)的開關(guān)磁阻式機(jī)電作動(dòng)器的轉(zhuǎn)速調(diào)節(jié)器,可知速度環(huán)的閉環(huán)傳遞函數(shù)為
(15)
由于TΣ的值遠(yuǎn)小于Kw,故式(15)可簡(jiǎn)化為
Φw(s)=[Kw(T0s+1)]/(s+Kw)
(16)
在常規(guī)PI控制器中,位置環(huán)通常采用比例控制,雖然可以保證階躍響應(yīng)的超調(diào)較小,但也會(huì)導(dǎo)致響應(yīng)速度較慢,難以跟蹤變化較快的位置信號(hào),因此本文所提控制器在位置環(huán)中引入了前饋環(huán)節(jié)來提高響應(yīng)速度,其控制框圖如圖11所示。圖11中,GF(s)為前饋環(huán)節(jié),GAPR(s)為位置調(diào)節(jié)器,Gb(s)為滾珠絲杠副的傳遞函數(shù),記為Gb(s)=δ/s。G1(s)為位置采樣,其傳遞函數(shù)為G1(s)=1/(T0s+B)。因此,位置環(huán)控制對(duì)象的開環(huán)傳遞函數(shù)可寫為
Gp(s)=Φw(s)Gb(s)G1(s)=
(17)
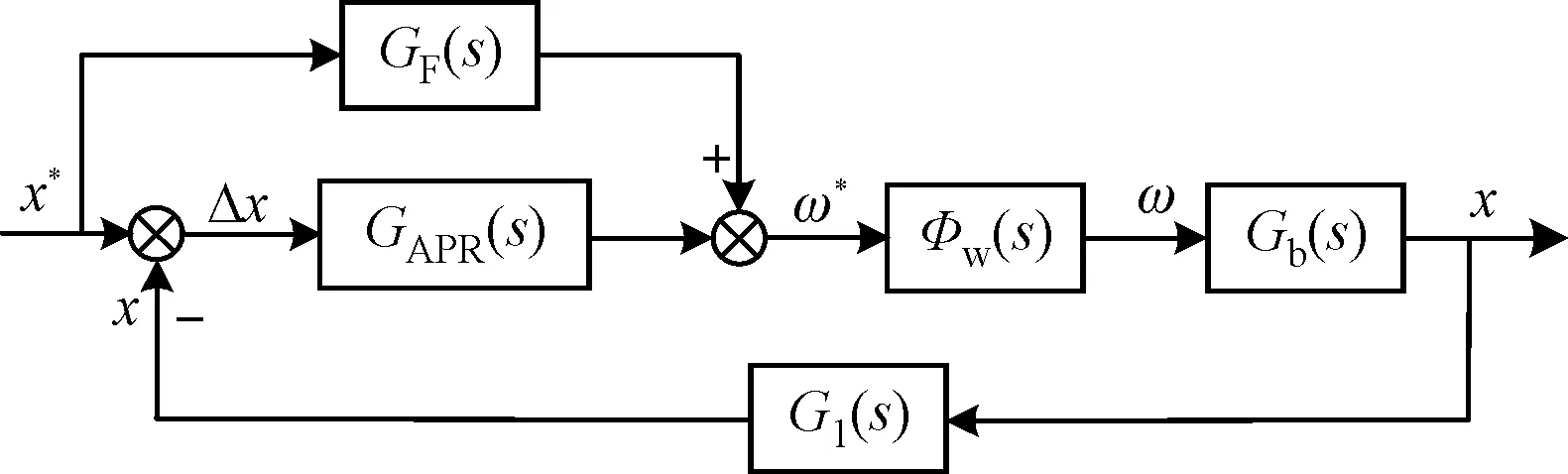
圖11 機(jī)電作動(dòng)器位置環(huán)的控制框圖Fig.11 The control block diagram of the position loop
機(jī)電作動(dòng)器位置環(huán)的控制對(duì)象是典型的Ⅰ型系統(tǒng)。為使系統(tǒng)能實(shí)現(xiàn)恒定位置跟蹤且保證無穩(wěn)態(tài)誤差,由于位置調(diào)節(jié)器采用比例控制,故有
(18)
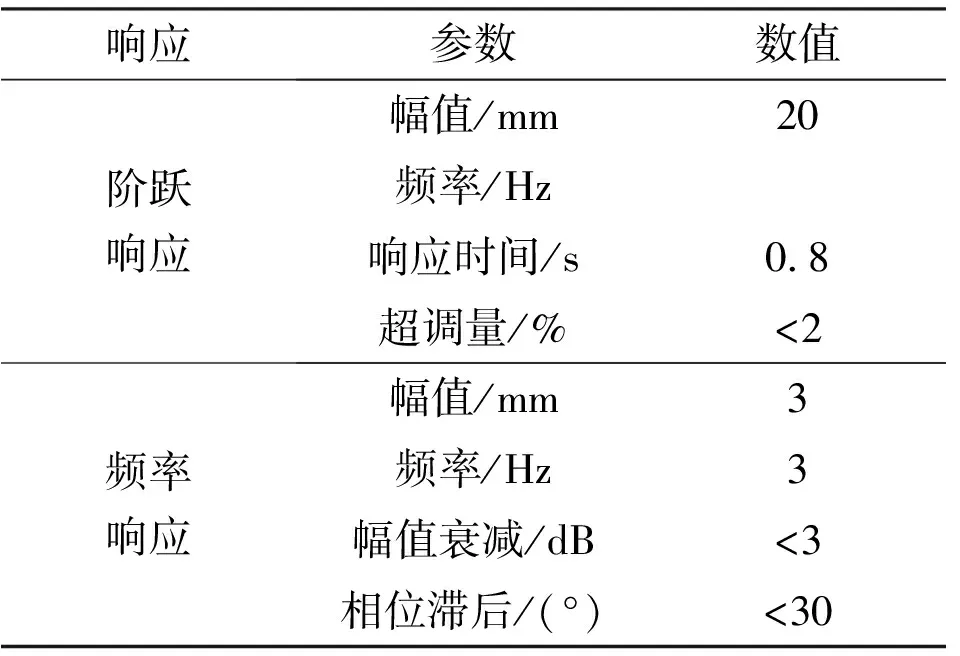
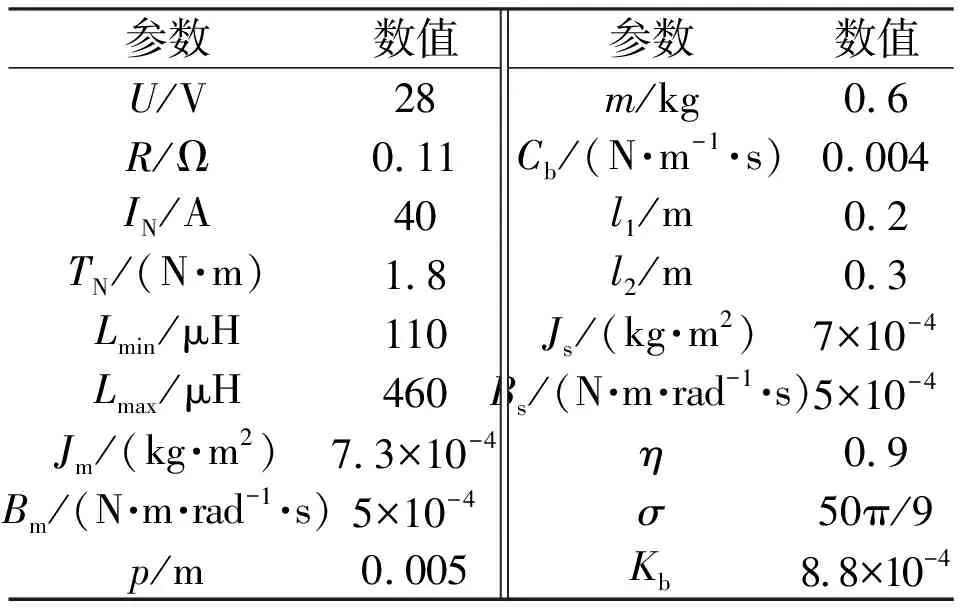
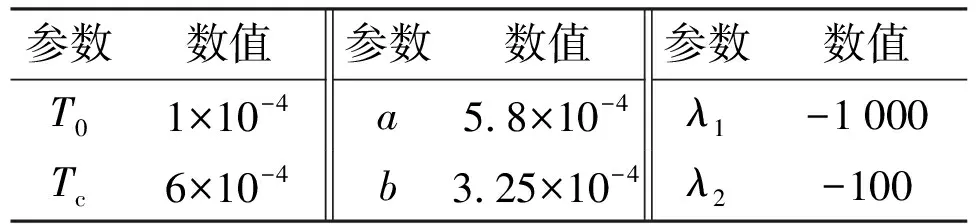
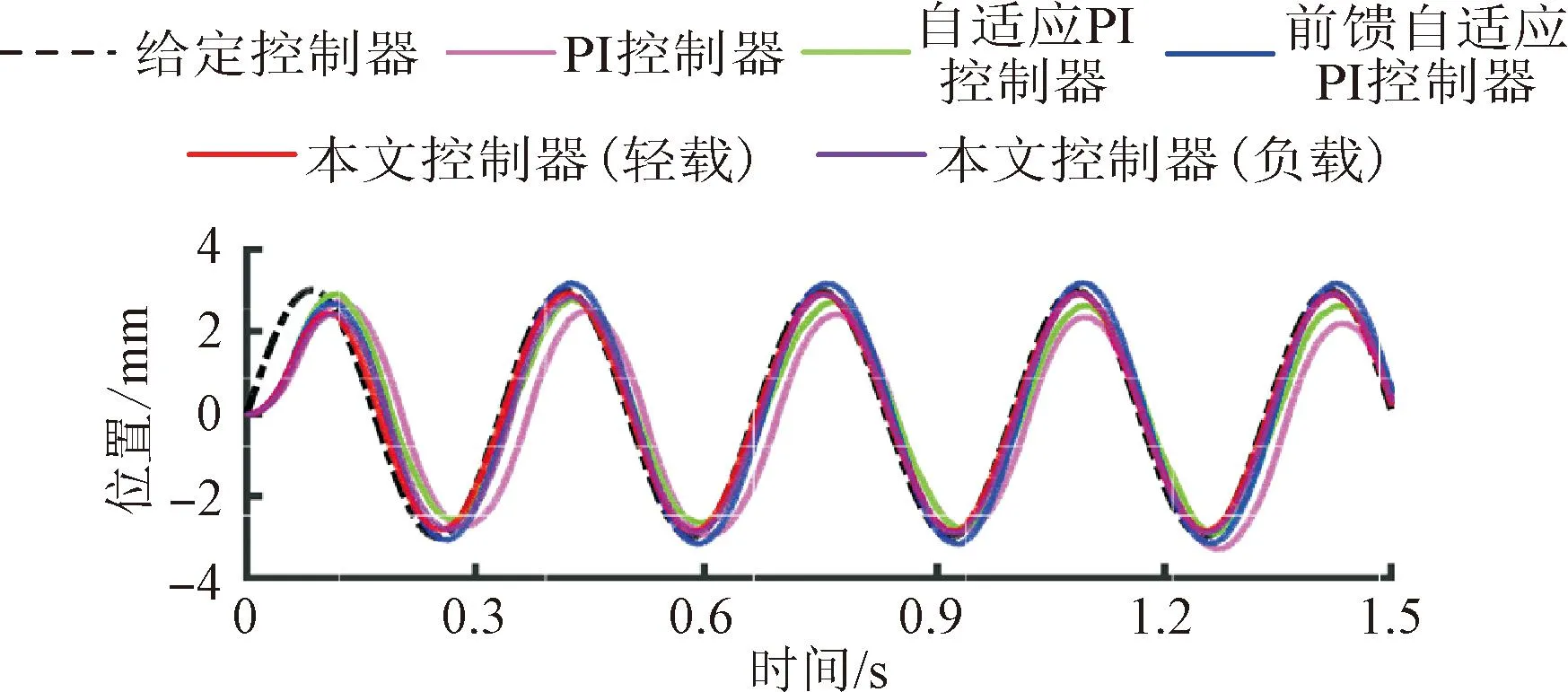
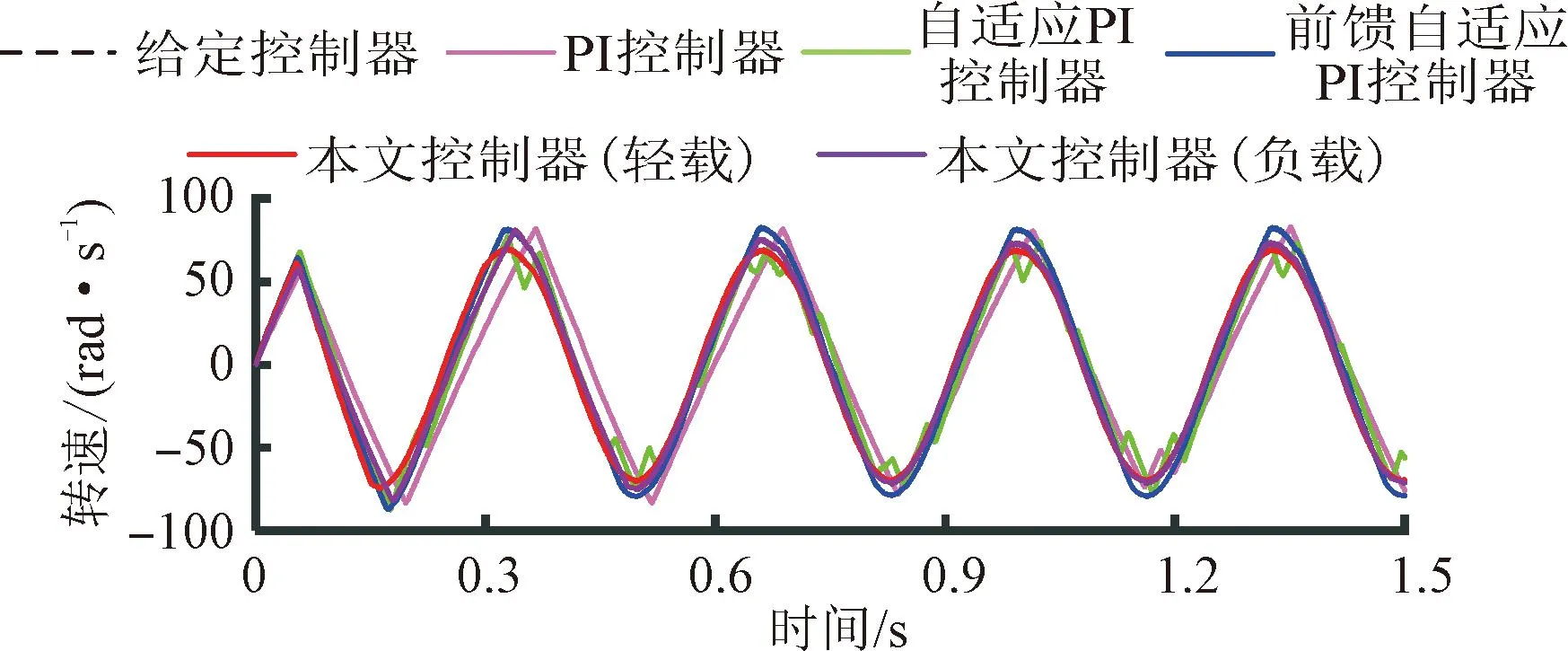
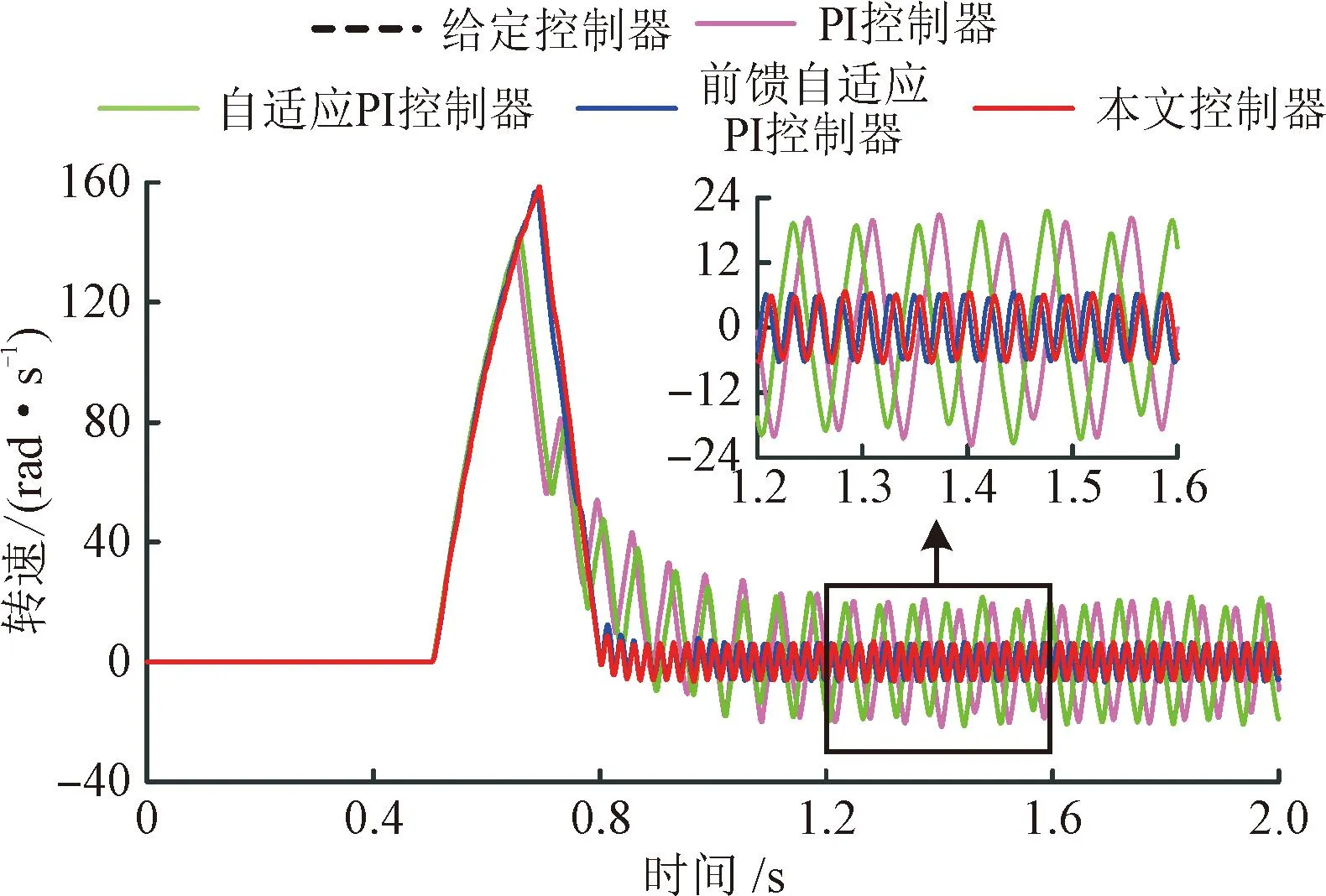
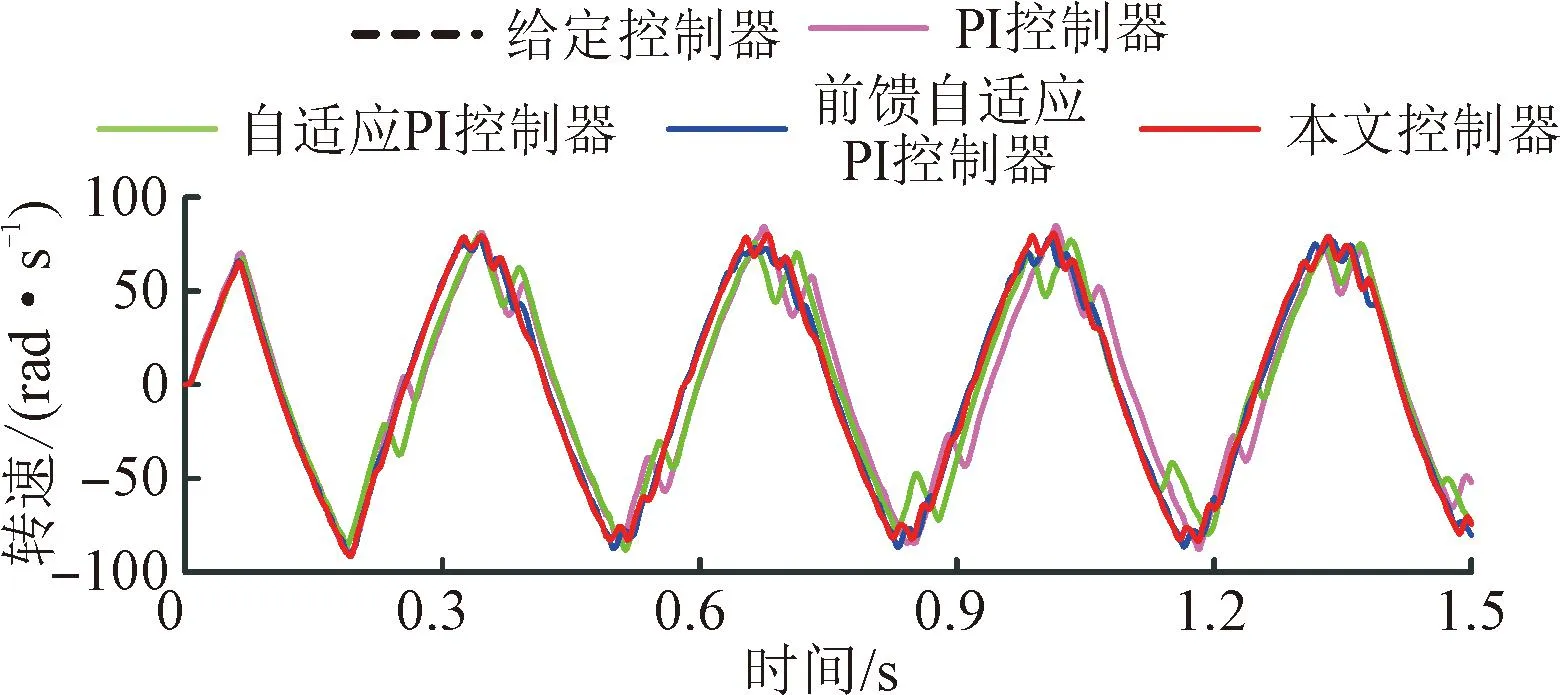
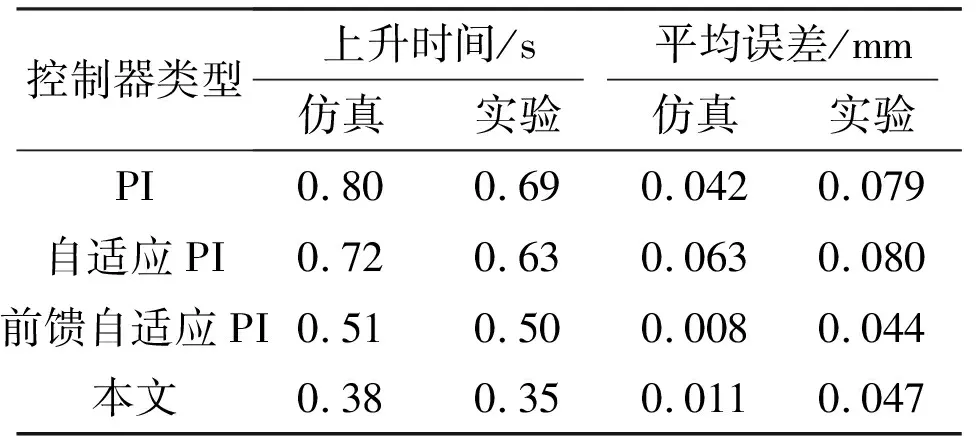
式中:Kp為位置調(diào)節(jié)器的比例系數(shù)。根據(jù)文獻(xiàn)[25]中典型Ⅰ型系統(tǒng)的參數(shù)整定方法,位置調(diào)節(jié)器的值Kp=Kwk/δ,其中0.25 (19) 為提高機(jī)電作動(dòng)器的位置響應(yīng)速度,在位置環(huán)中引入前饋環(huán)節(jié)后系統(tǒng)的閉環(huán)傳遞函數(shù)變?yōu)?/p> (20) 為使開關(guān)磁阻式機(jī)電作動(dòng)器能夠完全跟蹤給定的位置信號(hào),令Φp(s)=1,代入式(20),可得 (21) 當(dāng)開關(guān)磁阻式機(jī)電作動(dòng)器的位置環(huán)引入前饋環(huán)節(jié)后,機(jī)電作動(dòng)器位置環(huán)的階躍響應(yīng)和伯德圖分別如圖12、圖13所示。從圖12可以看出,開關(guān)磁阻式機(jī)電作動(dòng)器的位置環(huán)在引入前饋環(huán)節(jié)后雖然會(huì)導(dǎo)致位置的階躍響應(yīng)有少許超調(diào),但可以顯著提高位置響應(yīng)速度。此外,位置環(huán)在引入前饋環(huán)節(jié)后,k的值對(duì)機(jī)電作動(dòng)器位置響應(yīng)性能的影響不再明顯,但k的值越小超調(diào)越小,所以k取0.25較為合適。從圖13可以看出,引入前饋環(huán)節(jié)可以顯著減小機(jī)電作動(dòng)器在正弦位置信號(hào)跟蹤時(shí)的幅值衰減和相位滯后。 圖12 機(jī)電作動(dòng)器中位置環(huán)的階躍響應(yīng)曲線Fig.12 The step response curve of position loop 圖13 機(jī)電作動(dòng)器中位置環(huán)的伯德圖Fig.13 The bode diagram of EMA position loop 為驗(yàn)證本文所提位置控制器的有效性和優(yōu)越性,對(duì)比分析了常規(guī)PI控制器、考慮開關(guān)磁阻電機(jī)非線性特性的自適應(yīng)PI控制器、含位置前饋的自適應(yīng)PI控制器以及所提基于實(shí)時(shí)電流補(bǔ)償和自適應(yīng)PI的位置控制器,在開關(guān)磁阻式機(jī)電作動(dòng)器階躍響應(yīng)和頻率響應(yīng)上的位置跟蹤性能。其中機(jī)電作動(dòng)器階躍響應(yīng)和頻率響應(yīng)的性能要求如表1所示,轉(zhuǎn)向葉片系統(tǒng)的參數(shù)由表2所示,所提位置控制器的參數(shù)由表3所示。由于機(jī)電作動(dòng)器的直線位移與轉(zhuǎn)向葉片的偏轉(zhuǎn)角度基本相等,且機(jī)電作動(dòng)器測(cè)量直線位移的LVDT變壓器具有較高的測(cè)量精度,故選用機(jī)電作動(dòng)器的直線位移作為控制變量。 表1 開關(guān)磁阻式機(jī)電作動(dòng)器的性能指標(biāo) 表2 轉(zhuǎn)向葉片系統(tǒng)參數(shù) 表3 位置控制器參數(shù) 搭建了基于4種控制器的轉(zhuǎn)向葉片系統(tǒng)仿真模型,對(duì)轉(zhuǎn)向葉片系統(tǒng)中開關(guān)磁阻式機(jī)電作動(dòng)器的階躍響應(yīng)和頻率響應(yīng)特性進(jìn)行了如下仿真分析。 3.1.1 階躍響應(yīng)仿真 給定20 mm的恒定位置信號(hào),機(jī)電作動(dòng)器在4種控制器控制下的階躍響應(yīng)曲線如圖14所示。 (a)位置跟蹤曲線 (b)階躍響應(yīng)轉(zhuǎn)速曲線 圖14(a)所示的位置跟蹤曲線表明4種控制器均可以使機(jī)電作動(dòng)器在0.8 s內(nèi)到達(dá)給定位置,且超調(diào)量均小于0.1 mm,滿足階躍響應(yīng)的性能指標(biāo)要求。不過所提控制器使機(jī)電作動(dòng)器具有最快的響應(yīng)速度。從圖14(a)可以看出,4種控制器的響應(yīng)速度越來越快,證明了實(shí)時(shí)電流補(bǔ)償環(huán)節(jié),基于開關(guān)磁阻電機(jī)非線性特性的自適應(yīng)PI以及位置前饋環(huán)節(jié)均有效提高了開關(guān)磁阻式機(jī)電作動(dòng)器的響應(yīng)速度。此外,放大圖還表明PI控制器和自適應(yīng)PI控制器相比于前饋?zhàn)赃m應(yīng)PI控制器和所提控制器使機(jī)電作動(dòng)器在到達(dá)給定位置后產(chǎn)生了較為明顯的位置波動(dòng)。這是由于后兩種控制器可以通過位置前饋環(huán)節(jié)較好地預(yù)測(cè)給定位置信號(hào)的未來趨勢(shì)提前做出了補(bǔ)償控制。圖14(b)表明,PI控制器和自適應(yīng)PI控制器使機(jī)電作動(dòng)器在到達(dá)給定位置后的轉(zhuǎn)速調(diào)整非頻繁且轉(zhuǎn)速波動(dòng)較大,而后兩種控制器的轉(zhuǎn)速波動(dòng)則非常微小,可知位置前饋環(huán)節(jié)可以有效減小機(jī)電作動(dòng)器轉(zhuǎn)速調(diào)整的幅度,從而減小機(jī)電作動(dòng)器的穩(wěn)態(tài)跟蹤誤差。 3.1.2 頻率響應(yīng)仿真 給定頻率為3 Hz、幅值為3 mm的正弦信號(hào),機(jī)電作動(dòng)器的階躍響應(yīng)曲線如圖15所示。從圖15(a)可以看出:除常規(guī)PI控制器外,其余3種控制器的幅值衰減均不超過3 dB,相位滯后不超過30°;其中所提控制器的正弦信號(hào)跟蹤性能最好。PI控制器和自適應(yīng)PI控制器的幅值衰減和相位滯后較為明顯,不過自適應(yīng)PI控制器的性能要好于PI控制器,而前饋?zhàn)赃m應(yīng)PI控制器則有少許超調(diào)。對(duì)照?qǐng)D15(b)所示的位置跟蹤誤差曲線,可知PI控制器的位置跟蹤誤差波動(dòng)最大,而所提控制器的位置跟蹤誤差波動(dòng)最小,且4種控制器的位置跟蹤誤差依次遞減。這是由于PI控制器的參數(shù)是根據(jù)開關(guān)磁阻電機(jī)的線性模型整定的,與真實(shí)模型的偏差較大;而PI控制器本身受模型精度的影響較大,故位置跟蹤誤差最大。而所提控制器中的實(shí)時(shí)電流補(bǔ)償環(huán)節(jié),自適應(yīng)PI和位置前饋環(huán)節(jié)均可以有效提高開關(guān)磁阻式機(jī)電作動(dòng)器的頻率響應(yīng)性能,所以其位置跟蹤誤差最小。圖15(c)表明,4種控制器的轉(zhuǎn)速變化幅值基本接近。不過,相比于前饋?zhàn)赃m應(yīng)PI控制器和所提控制器,PI控制器的轉(zhuǎn)速響應(yīng)曲線較為滯后,在波峰波谷處的過渡非常迅速,呈現(xiàn)三角形狀,而自適應(yīng)PI控制器則在波峰波谷處有明顯的小紋波,兩種控制器在該位置進(jìn)行了較大幅度的轉(zhuǎn)速調(diào)節(jié)。這是由于這兩種控制器缺少位置前饋環(huán)節(jié)的預(yù)測(cè)作用而必須基于實(shí)時(shí)誤差進(jìn)行快速調(diào)節(jié)而導(dǎo)致轉(zhuǎn)速超調(diào),因此前饋?zhàn)赃m應(yīng)PI控制器和所提控制器因?yàn)榫哂形恢们梆伃h(huán)節(jié)而使得機(jī)電作動(dòng)器的轉(zhuǎn)速調(diào)節(jié)更為迅速和平滑。 (a)位置跟蹤曲線 (b)位置跟蹤誤差曲線 (c)頻率響應(yīng)轉(zhuǎn)速曲線 為驗(yàn)證所提控制器的有效性,搭建了圖16所示的實(shí)驗(yàn)平臺(tái),其主要由開關(guān)磁阻式機(jī)電作動(dòng)器、工控機(jī)、dSAPCE控制器、直流電源、驅(qū)動(dòng)柜、信號(hào)解碼器、電流鉗和模擬轉(zhuǎn)向葉片組成。其中dSPACE為系統(tǒng)的主控制器,控制頻率為10 kHz,直流電源的電壓為28 V,驅(qū)動(dòng)柜采用不對(duì)稱半橋電路,信號(hào)解碼器負(fù)責(zé)對(duì)機(jī)電作動(dòng)器中旋轉(zhuǎn)變壓器的轉(zhuǎn)速轉(zhuǎn)角信號(hào)和LVDT變壓器的直線位移信號(hào)進(jìn)行解碼,并反饋到dSPACE控制器中,從而對(duì)機(jī)電作動(dòng)器進(jìn)行控制。電流鉗負(fù)責(zé)機(jī)電作動(dòng)器的電流信號(hào)采樣,所有信號(hào)的采樣頻率與控制頻率相等,均為10 kHz。實(shí)驗(yàn)數(shù)據(jù)由dSPACE控制器的在線進(jìn)行界面觀測(cè)和記錄。 圖16 轉(zhuǎn)向葉片系統(tǒng)實(shí)驗(yàn)平臺(tái)Fig.16 The experimental platform of steering vane system 3.2.1 階躍響應(yīng)實(shí)驗(yàn) 4種控制器階躍響應(yīng)的實(shí)驗(yàn)結(jié)果如圖17所示。 由圖17可以看出,實(shí)驗(yàn)結(jié)果與仿真分析的結(jié)果基本一致,即4種控制器操縱下開關(guān)磁阻式機(jī)電作動(dòng)器的位置跟蹤性能依次增強(qiáng),且所提控制器具有最好的階躍響應(yīng)性能。圖17(a)驗(yàn)證了實(shí)時(shí)電流補(bǔ)償環(huán)節(jié)和轉(zhuǎn)速環(huán)自適應(yīng)PI和位置前饋環(huán)節(jié)可以較好地減小機(jī)電作動(dòng)器到達(dá)給定位置后的位置波動(dòng)。圖17(b)轉(zhuǎn)速響應(yīng)曲線與圖14相似,同樣表明前饋?zhàn)赃m應(yīng)PI和所提控制器可以使機(jī)電作動(dòng)器具有更快的響應(yīng)速度,且使作動(dòng)器在到達(dá)給定位置后的轉(zhuǎn)速波動(dòng)更小,這有利于降低開關(guān)磁阻式機(jī)電作動(dòng)器的穩(wěn)態(tài)跟蹤誤差,降低工作時(shí)的振動(dòng)與噪聲,這一現(xiàn)象可以在實(shí)驗(yàn)時(shí)明顯發(fā)現(xiàn)。 (a)位置跟蹤曲線 (b)階躍響應(yīng)轉(zhuǎn)速曲線 3.2.2 頻率響應(yīng)實(shí)驗(yàn) 4種控制器頻率響應(yīng)的實(shí)驗(yàn)結(jié)果如圖18所示。 (a)位置跟蹤曲線 (c)頻率響應(yīng)轉(zhuǎn)速曲線 與仿真結(jié)果相似,圖18(a)表明:PI控制器和自適應(yīng)控制器對(duì)機(jī)電作動(dòng)器的控制效果較差,相位滯后相比于前饋?zhàn)赃m應(yīng)PI控制器和所提控制器更為明顯;而且PI控制器控制下的位置跟蹤波形在波谷位置的畸變較自適應(yīng)PI控制器更為嚴(yán)重,這表明轉(zhuǎn)速環(huán)自適應(yīng)PI調(diào)整環(huán)節(jié)具有較好的轉(zhuǎn)速調(diào)整性能,可以使開關(guān)磁阻式機(jī)電作動(dòng)器的動(dòng)態(tài)響應(yīng)性能更好。圖18(b)表明,4種控制器的位置跟蹤誤差呈依次遞減現(xiàn)象。其中所提控制器具有最小的跟蹤誤差和最好的正弦信號(hào)跟蹤性能,而PI控制器的位置跟蹤誤差最大,不過相比于仿真結(jié)果要小,其主要原因是實(shí)驗(yàn)系統(tǒng)與仿真模型的存在差異,尤其是實(shí)驗(yàn)系統(tǒng)在低速時(shí)的摩擦力要明顯高于仿真模型。從圖18(c)可以看出,PI控制器和自適應(yīng)PI控制器的轉(zhuǎn)速響應(yīng)相比于前饋?zhàn)赃m應(yīng)PI控制器和所提控制器要滯后,且在波峰波谷位置的轉(zhuǎn)速波動(dòng)幅值也更大。這與仿真結(jié)果一致,均表明了位置前饋環(huán)節(jié)有利于增強(qiáng)開關(guān)磁阻式機(jī)電作動(dòng)器的動(dòng)態(tài)調(diào)整性能,使作動(dòng)器的運(yùn)行更加平穩(wěn)。 仿真分析和實(shí)驗(yàn)結(jié)果的對(duì)比如表4、表5所示。根據(jù)表4中上升時(shí)間和表5中平均誤差的實(shí)驗(yàn)數(shù)據(jù)可知:相比于前3種控制器,所提控制器的響應(yīng)速度分別提高了49.3%、44.4%和30.0%,位置跟蹤精度分別提高了54.8%、49.2%和2.9%,表明所提控制器具有最優(yōu)的位置跟蹤性能。這是因?yàn)樽赃m應(yīng)PI控制器考慮了開關(guān)磁阻電機(jī)的非線性特點(diǎn),可以使機(jī)電作動(dòng)器根據(jù)開關(guān)磁阻電機(jī)的磁飽和狀態(tài)選擇最優(yōu)的參數(shù)對(duì)轉(zhuǎn)速進(jìn)行調(diào)節(jié),故使得自適應(yīng)PI控制器的響應(yīng)速度相比于PI控制器更快。相比于自適應(yīng)PI控制器,前饋?zhàn)赃m應(yīng)PI控制器增加了位置前饋環(huán)節(jié),可以根據(jù)給定位置信號(hào)的變化趨勢(shì)提前做出補(bǔ)償然后進(jìn)行轉(zhuǎn)速調(diào)節(jié),因此該控制器進(jìn)一步提高了機(jī)電作動(dòng)器的響應(yīng)速度并有效減小了開關(guān)磁阻電機(jī)的轉(zhuǎn)速波動(dòng)。相比于前3種控制器,所提控制器還考慮了負(fù)載擾動(dòng)的影響,通過引入基于負(fù)載觀測(cè)器的實(shí)時(shí)電流補(bǔ)償環(huán)節(jié),所提控制器使開關(guān)磁阻式機(jī)電作動(dòng)器較好地克服負(fù)載擾動(dòng)的不利影響,使開關(guān)磁阻式機(jī)電作動(dòng)器的動(dòng)態(tài)響應(yīng)性能更好,位置跟蹤精度更高。這證明了所提控制器中基于負(fù)載觀測(cè)器的實(shí)時(shí)電流補(bǔ)償環(huán)節(jié),轉(zhuǎn)速環(huán)自適應(yīng) PI 和位置前饋環(huán)節(jié)的有效性。 表4 機(jī)電作動(dòng)器階躍響應(yīng)的仿真實(shí)驗(yàn)結(jié)果 表5 機(jī)電作動(dòng)器頻率響應(yīng)的仿真實(shí)驗(yàn)結(jié)果 為了使轉(zhuǎn)向葉片系統(tǒng)中開關(guān)磁阻式機(jī)電作動(dòng)器獲得較好的位置跟蹤性能,從而增強(qiáng)氣墊登陸艇的機(jī)動(dòng)性,提出了一種含實(shí)時(shí)電流補(bǔ)償和的自適應(yīng)PI控制策略,并給出了其設(shè)計(jì)和參數(shù)整定方法。基于仿真和實(shí)驗(yàn)結(jié)果,得到以下結(jié)論。 (1)基于機(jī)電作動(dòng)器中開關(guān)磁阻電機(jī)的非線性特性,通過對(duì)控制器轉(zhuǎn)速環(huán)的PI參數(shù)進(jìn)行自適應(yīng)最優(yōu)調(diào)節(jié),可有效提高機(jī)電作動(dòng)器的響應(yīng)速度。 (2)通過在控制器引入位置前饋環(huán)節(jié)和實(shí)時(shí)電流補(bǔ)償環(huán)節(jié),可以進(jìn)一步提高開關(guān)磁阻式機(jī)電作動(dòng)器的響應(yīng)速度并減小其轉(zhuǎn)速波動(dòng),從而有效提高機(jī)電作動(dòng)器的位置跟蹤精度。 (3)所提含實(shí)時(shí)電流補(bǔ)償?shù)淖赃m應(yīng)PI控制器可以有效控制開關(guān)磁阻式機(jī)電作動(dòng)器以較快的速度和較高的精度跟蹤恒定位置信號(hào)和正弦位置信號(hào),滿足轉(zhuǎn)葉片系統(tǒng)的動(dòng)態(tài)性能要求。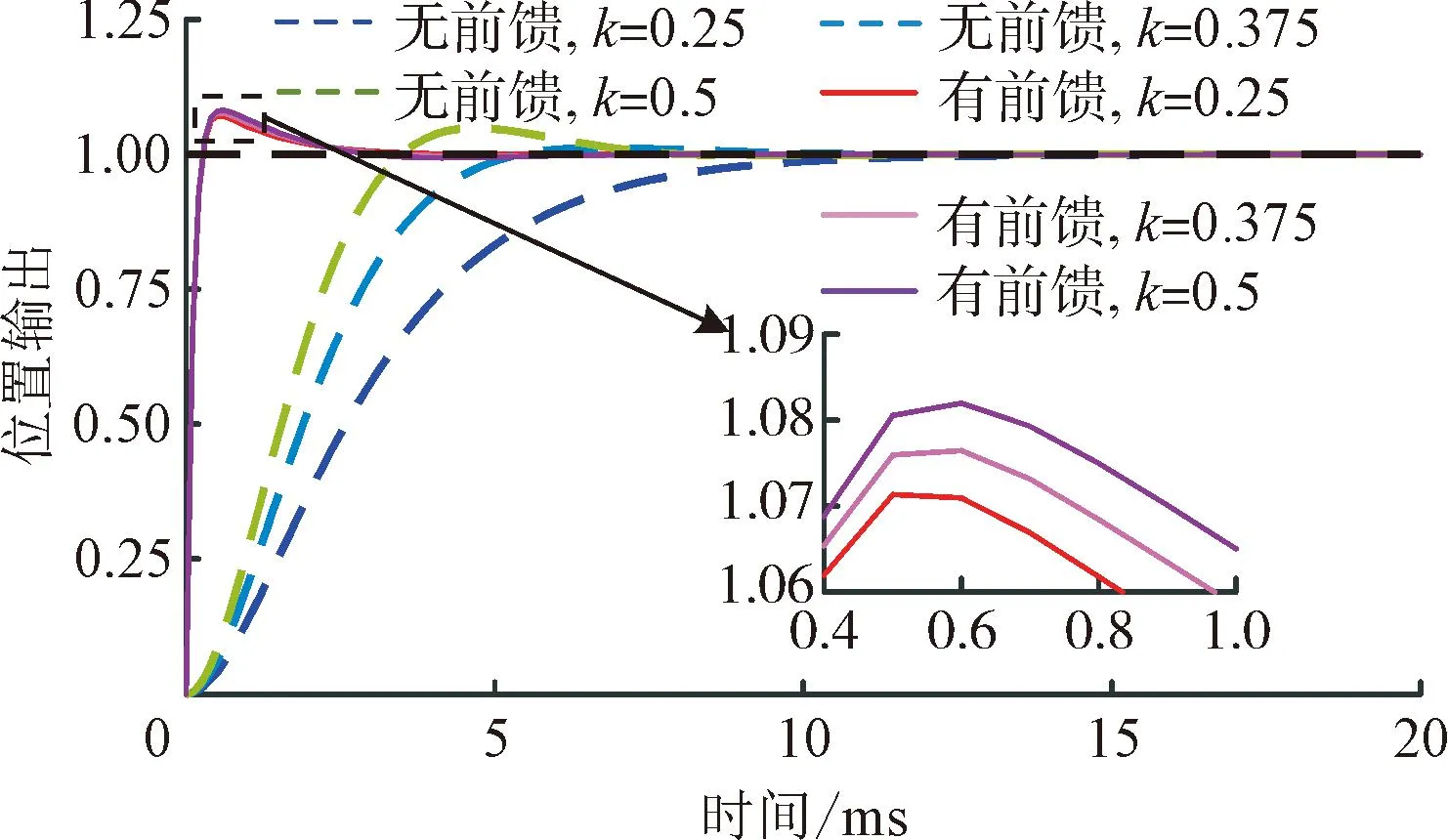

3 仿真分析與實(shí)驗(yàn)驗(yàn)證
3.1 仿真分析



3.2 實(shí)驗(yàn)驗(yàn)證



3.3 仿真與實(shí)驗(yàn)結(jié)果的比較分析

4 結(jié) 論