基于線性自抗擾控制的單相電力電子變壓器整流級控制策略
2024-01-19 08:16:58宋平崗連加巍鄭雅芝龍日起楊長欖
電測與儀表 2024年1期
宋平崗,連加巍,鄭雅芝,龍日起,楊長欖
(華東交通大學(xué) 電氣與自動化工程學(xué)院, 南昌 330000)
0 引 言
電力電子變壓器(power electronic transformer,PET)作為一種將電力電子變流技術(shù)與高頻變壓技術(shù)結(jié)合起來的新型能量轉(zhuǎn)換系統(tǒng),近年來廣泛應(yīng)用于電力系統(tǒng)的課題研究中,發(fā)展?jié)摿薮蟆F洳粌H可以實(shí)現(xiàn)傳統(tǒng)電力變壓器電壓轉(zhuǎn)換和能量傳輸?shù)墓δ?還具有體積小、無污染、電壓穩(wěn)定可調(diào)、高低側(cè)故障隔離以及功率可控等優(yōu)點(diǎn)[1]。級聯(lián)H橋整流器(cascaded H-bridge rectifier,CHBR)作為PET的前級系統(tǒng),調(diào)制算法簡單、模塊化、維護(hù)簡單,在工業(yè)中已取得廣泛應(yīng)用[2-3]。
近年來,眾多學(xué)者對于CHBR型整流器的控制算法進(jìn)行了深入研究,文獻(xiàn)[4]將滑模變結(jié)構(gòu)控制策略應(yīng)用到PET的整流級,但滑模自身固有的高頻抖振問題是實(shí)際應(yīng)用中的主要障礙。文獻(xiàn)[5]采用了一種非線性PID控制方法,該方法雖然簡單通用,但對非線性函數(shù)的選取要求高,當(dāng)系統(tǒng)的工況發(fā)生改變時(shí),系統(tǒng)很容易失去穩(wěn)定性。文獻(xiàn)[6]采用了一種準(zhǔn)PR控制技術(shù),雖然提高了系統(tǒng)穩(wěn)定性,抑制了網(wǎng)側(cè)電流諧波,但對系統(tǒng)中參數(shù)的設(shè)計(jì)精度要求高。
工程控制中的被控對象大都是非線性的,并且干擾和不確定性廣泛存在于被控對象和控制系統(tǒng)中。傳統(tǒng)PID控制動態(tài)響應(yīng)慢,當(dāng)受到外部的劇烈干擾后,波動大,抗擾能力差。而自抗擾控制(active disturbance rejection control, ADRC)作為一種非線性控制系統(tǒng)是文獻(xiàn)[7]中提出的,其具有響應(yīng)速度快,魯棒性強(qiáng)、控制精度高等優(yōu)點(diǎn)。其核心思想是將系統(tǒng)轉(zhuǎn)換為簡單的積分串聯(lián)形式,從而把實(shí)際對象和標(biāo)準(zhǔn)型的差作為廣義擾動(系統(tǒng)的內(nèi)部擾動和外部擾動)通過估計(jì)而相消,極具創(chuàng)造性地解決了系統(tǒng)的不確定性問題[8]。ADRC包括三個(gè)核心組成部分:跟蹤微分器(TD)、擴(kuò)張狀態(tài)觀測器(ESO)、非線性誤差反饋控制率(SEF)[9]。因其采用的非線性函數(shù)參數(shù)數(shù)目多,調(diào)節(jié)復(fù)雜,文獻(xiàn)[10]中通過頻率尺度的概念,提出了線性自抗擾控制器結(jié)構(gòu),利用帶寬整定控制器參數(shù),提供了易于實(shí)現(xiàn)簡化的公式,進(jìn)一步推動了ADRC控制理論的發(fā)展[11]。文獻(xiàn)[12-13]對LADRC的穩(wěn)定性進(jìn)行了理論分析證明。
ADRC作為一種新型的非線性控制策略,已經(jīng)在眾多的領(lǐng)域中得到應(yīng)用。文獻(xiàn)[14]將ADRC應(yīng)用到光伏并網(wǎng)逆變器中,提高了系統(tǒng)的動靜態(tài)性能;文獻(xiàn)[15]提出將ADRC應(yīng)用到風(fēng)力發(fā)電無功補(bǔ)償當(dāng)中,有效抑制了系統(tǒng)的低頻震蕩;文獻(xiàn)[16]將LADRC應(yīng)用到四旋翼無人機(jī)中,提高了系統(tǒng)的魯棒性。
雖然ADRC控制策略在很多領(lǐng)域得到應(yīng)用,但尚未有相關(guān)文獻(xiàn)將ADRC控制應(yīng)用到電力電子變壓器中。因此,文章以電力電子變壓器的前級系統(tǒng)單相CHBR為研究對象,在電壓環(huán)采用LADRC控制策略,通過分析單相CHBR的數(shù)學(xué)模型對控制器進(jìn)行設(shè)計(jì)。結(jié)合負(fù)載平衡,負(fù)載不平衡以及負(fù)載突變時(shí)的仿真波形與傳統(tǒng)PI控制相對比。對比分析得出:采用LADRC控制器時(shí),系統(tǒng)能夠取得更好的控制效果。
1 單相級聯(lián)H橋整流器拓?fù)?/h2>1.1 單相級聯(lián)H橋整流器拓?fù)浣Y(jié)構(gòu)
以單相三級聯(lián)H橋整流器為例,其拓?fù)浣Y(jié)構(gòu)如圖1所示。開關(guān)管由帶反并聯(lián)二極管的全功率型半導(dǎo)體開關(guān)器件構(gòu)成。直流側(cè)采用電容儲能,網(wǎng)側(cè)電感用于濾除交流側(cè)電流諧波成分。其中L和Rs為網(wǎng)側(cè)電感和等效電阻;Ti1、Ti2、Ti3、Ti4(i= 1,2,3)為第i個(gè)H橋的開關(guān)器件;us為網(wǎng)側(cè)電壓;is為網(wǎng)側(cè)電流;uab為交流側(cè)輸入電壓;uC1、uC2、uC3為各H橋直流側(cè)懸浮電容C1、C2、C3的電壓;R1、R2、R3為各H橋等效電阻。
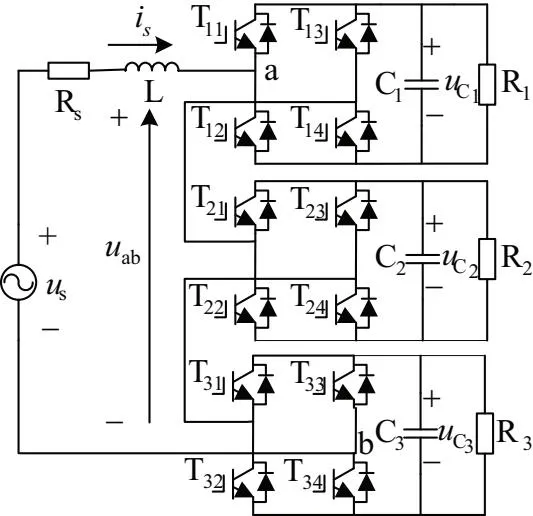
圖1 單相三級聯(lián)H橋整流器拓?fù)浣Y(jié)構(gòu)
1.2 單相級聯(lián)H橋整流器數(shù)學(xué)模型
首先定義開關(guān)管的開關(guān)函數(shù),定義第i個(gè)H橋的開關(guān)管工作狀態(tài)為Si;Si一共有三種工作狀態(tài),分別為1、 0、-1。

(1)
(2)
(3)
采用二階廣義積分(SOGI)構(gòu)造網(wǎng)側(cè)輸入電壓us,電流is的虛擬正交分量[17],再經(jīng)由αβ/dq坐標(biāo)變換后將式(3)轉(zhuǎn)化為式(4)的形式。
(4)
2 LADRC工作原理
LADRC由線性擴(kuò)張狀態(tài)觀測器(LESO),線性誤差反饋控制率(LSEF)以及擾動補(bǔ)償項(xiàng)組成。
2.1 線性擴(kuò)張狀態(tài)觀測器(LESO)
考慮單輸入單輸出的一階系統(tǒng):
式中f為系統(tǒng)的總擾動;u為系統(tǒng)控制量;b為控制器增益;ω為內(nèi)部擾動;d為外部擾動;x為系統(tǒng)的狀態(tài)變量;y為系統(tǒng)的輸出值,假設(shè)f可微,將系統(tǒng)擴(kuò)展為一個(gè)新的狀態(tài)變量。即:
(5)
其中x1=y,x2=f;由龍貝格提出的狀態(tài)觀測器理論,LESO狀態(tài)方程如下:
(6)

(7)
參數(shù)l1,l2可以通過系數(shù)矩陣A的特征根求得:
|sE-A| =s2+l1s+l2= (s+ω0)2
(8)
2.2 線性誤差反饋控制率(LSEF)
(9)
式中b0為b的估計(jì)值。
(10)
其中x*為系統(tǒng)的給定參考值,Kp為比例系數(shù)。
則系統(tǒng)的傳遞函數(shù)可以寫為:
因此將Kp配置到控制器的極點(diǎn),即Kp=ωc;其中ωc為控制器的帶寬。
一階系統(tǒng)的LADRC控制框圖如圖2所示。
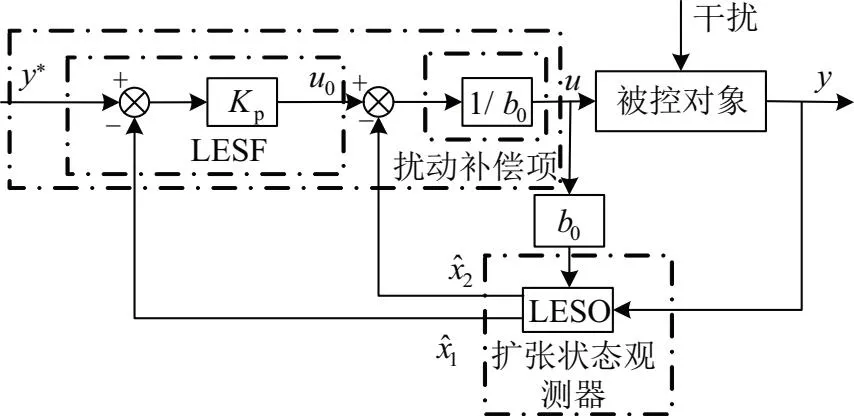
圖2 一階LADRC控制器框圖
3 級聯(lián)H橋整流器控制策略
3.1 LADRC控制器設(shè)計(jì)
由式(4)中的直流側(cè)電壓狀態(tài)方程設(shè)計(jì)LADRC控制器。方程如下:
(11)
由式(11)可知單相級聯(lián)H橋整流器為一階被控對象,因此按照一階LADRC進(jìn)行控制器的設(shè)計(jì)。因此將式(11)改寫為:
(12)
設(shè)狀態(tài)變量x1=udc,x2=f,其中x2是擴(kuò)展的狀態(tài)變量。將式(12)按照式(5)的形式進(jìn)行改寫,形式如下:
(13)
則LESO的狀態(tài)方程為:
(14)

控制率和LSEF按照式(9)、式(10)進(jìn)行設(shè)計(jì),此處不在過多描述。
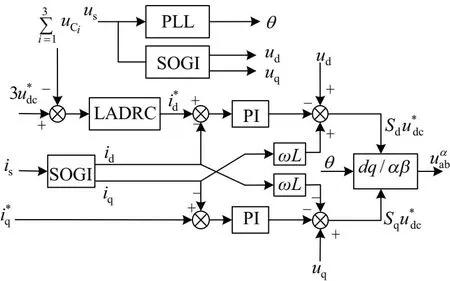
圖3 dq軸電流解耦控制圖
(15)
3.2 直流電容電壓平衡控制
電力電子變壓器中級聯(lián)H橋整流級中各H橋直流側(cè)懸浮電容電壓的均衡是電力電子變壓器安全穩(wěn)定運(yùn)行的前提;直流側(cè)電壓的不平衡很容易導(dǎo)致器件損壞,更嚴(yán)重地將造成整個(gè)系統(tǒng)的崩潰。因此制定相應(yīng)的控制策略對級聯(lián)H橋整流器至關(guān)重要。

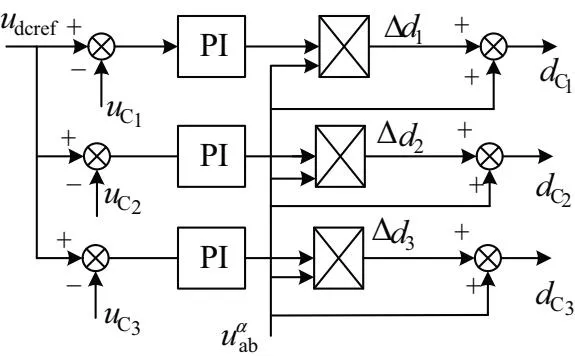
圖4 電容電壓平衡控制圖
4 仿真結(jié)果分析
為驗(yàn)證LADRC控制策略的有效性,通過Matlab/Simulink仿真軟件搭建單相三級聯(lián)H橋整流器仿真模型。系統(tǒng)仿真參數(shù)如表1所示。
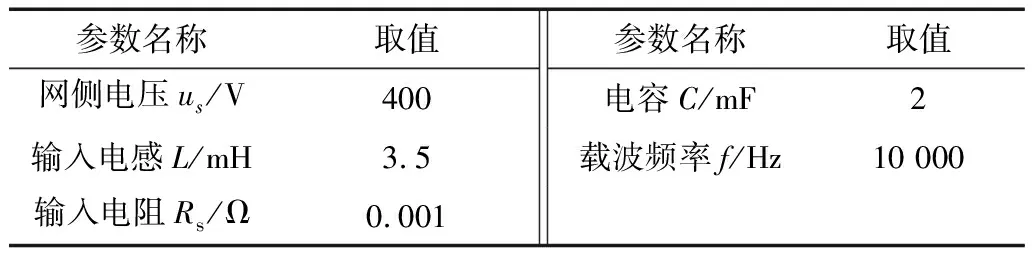
表1 三級聯(lián)H橋整流器系統(tǒng)參數(shù)

圖5為LADRC控制下系統(tǒng)穩(wěn)態(tài)運(yùn)行時(shí)網(wǎng)側(cè)電流電壓波形。可以看出,在該控制策略下系統(tǒng)網(wǎng)側(cè)電流電壓波形能保持同相位,即系統(tǒng)可以實(shí)現(xiàn)單位功率因數(shù)運(yùn)行。圖6為電壓環(huán)采用LADRC控制時(shí)的網(wǎng)側(cè)電流的傅里葉分析圖,THD值為4.58%;圖7為采用傳統(tǒng)PI控制時(shí)網(wǎng)側(cè)電流的傅里葉分析圖,THD值為6.13%。經(jīng)過對比可知,采用LADRC控制時(shí),系統(tǒng)的THD減小1.55%,具有更好的諧波特性。
為驗(yàn)證LADRC的優(yōu)越性,分別對直流側(cè)負(fù)載平衡時(shí)、負(fù)載不平衡時(shí)、負(fù)載突變時(shí)的仿真結(jié)果進(jìn)行分析。
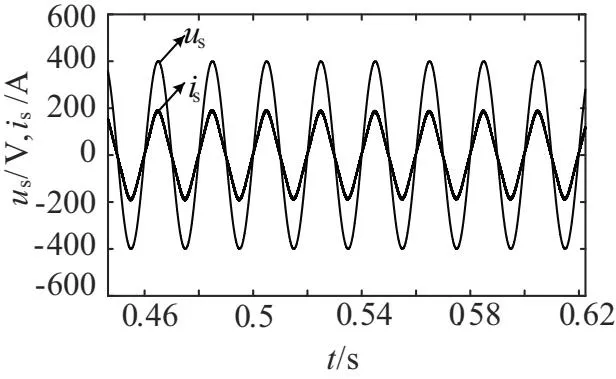
圖5 穩(wěn)態(tài)時(shí)網(wǎng)側(cè)電流電壓波形圖
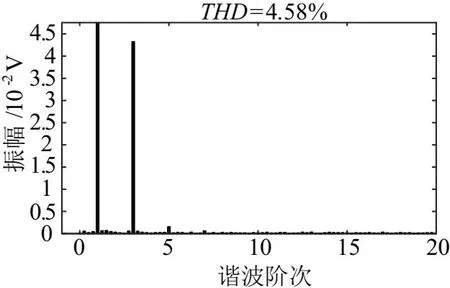
圖6 LADRC控制時(shí)網(wǎng)側(cè)電流傅里葉分析圖
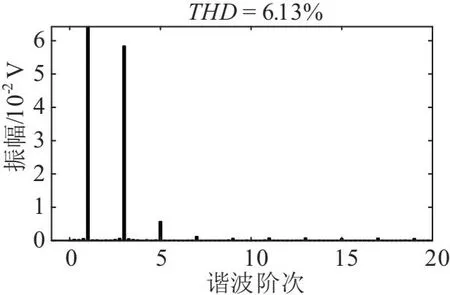
圖7 PI控制時(shí)網(wǎng)側(cè)電流傅里葉分析圖
圖8為三個(gè)H橋直流側(cè)負(fù)載R1、R2、R3都為100 Ω時(shí)采用LADRC控制和PI控制時(shí)電容電壓波形圖。可知采用LADRC控制時(shí)電容電壓在0.2 s時(shí)快速無超調(diào)地達(dá)到給定值。采用PI控制時(shí)電容電壓在0.8 s時(shí)達(dá)到給定值。由此可以得出,采用LADRC控制時(shí)系統(tǒng)達(dá)到穩(wěn)態(tài)的響應(yīng)時(shí)間優(yōu)于PI控制。

圖8 負(fù)載平衡時(shí)兩種控制策略對比圖
圖9和圖10分別為直流側(cè)負(fù)載不平衡時(shí)LADRC控制以及PI控制時(shí)電容電壓仿真波形圖。各H橋直流側(cè)負(fù)載參數(shù)為:R1=100 Ω、R2=110 Ω、R3=115 Ω。可以看出采用LADRC控制策略時(shí)各直流側(cè)電容電壓能夠在0.25 s內(nèi)快速達(dá)到平衡并跟蹤給定電壓值。采用PI控制時(shí)各電容電壓在0.5 s左右達(dá)到平衡,在0.7 s左右才能達(dá)到跟蹤給定值。通過對比可知負(fù)載不平衡時(shí)采用LADRC控制策略系統(tǒng)的響應(yīng)速度更快,抗擾動能力更強(qiáng)。
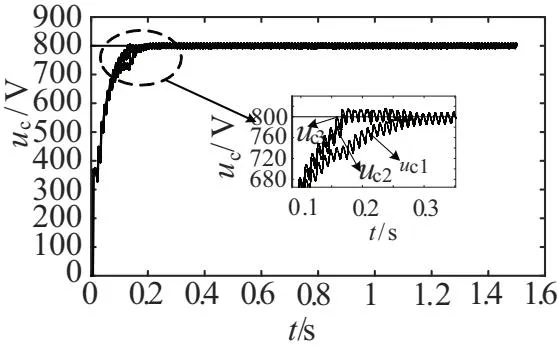
圖9 LADRC控制負(fù)載不平衡電容電壓波形圖
圖11和圖12為直流側(cè)負(fù)載在1 s時(shí)發(fā)生突變時(shí)采用LADRC控制和PI控制各H橋電容電壓波形圖。各單元模塊負(fù)載在100 Ω的基礎(chǔ)上突變值為R1= 120 Ω、R2=180 Ω、R3= 220 Ω,從圖中可知采用LADRC控制策略當(dāng)負(fù)載突變時(shí),各直流側(cè)電容電壓能夠在1.2 s恢復(fù)平衡,突變后的電壓幅值和相位波動很小。采用PI控制時(shí)各電容電壓在1.42 s秒左右才恢復(fù)平衡,突變后的電壓相位和幅值波動較大。通過對比可知負(fù)載突變時(shí)采用LADRC控制策略系統(tǒng)的擾動能力更強(qiáng),性能更優(yōu)越。
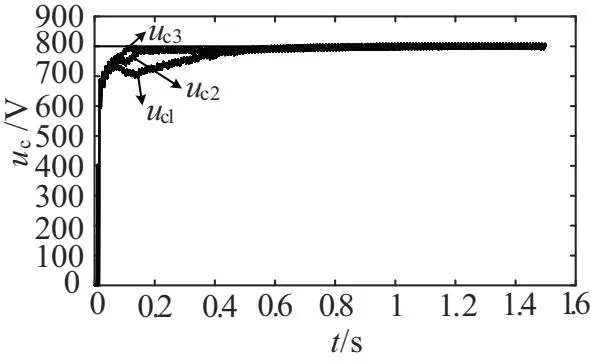
圖10 PI控制負(fù)載不平衡電容電壓波形圖
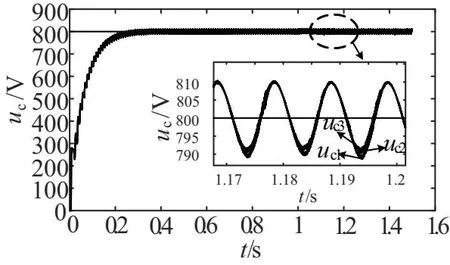
圖11 LADRC控制負(fù)載突變電容電壓波形圖
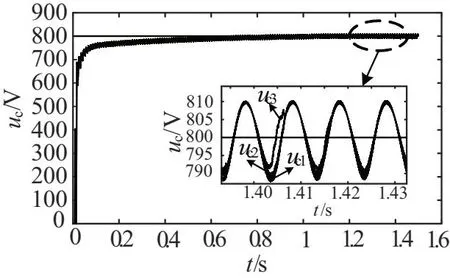
圖12 PI控制負(fù)載突變電容電壓波形圖
5 結(jié)束語
文章通過建立分析電力電子變壓器整流級的拓?fù)浣Y(jié)構(gòu)和數(shù)學(xué)模型,提出了一種基于線性自抗擾控制的電壓環(huán)控制策略,并與傳統(tǒng)PI控制策略相對比。對比仿真得出如下結(jié)論:
1) 采用LADRC控制的電力電子變壓器整流級系統(tǒng)網(wǎng)側(cè)電流具有更小的THD值;
2)該控制策略在負(fù)載平衡運(yùn)行狀態(tài)下,能夠快速達(dá)到平衡并跟蹤系統(tǒng)給定值,響應(yīng)速度更快;
3)在負(fù)載不平衡和突變時(shí)具有良好的抗擾動能力,能夠使電力電子變壓器更高效、更穩(wěn)定地運(yùn)行。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
