不同海況條件下艦載無人機(jī)著艦安全分析
2024-01-15 05:57:26張子軍張山王衍洋
哈爾濱工程大學(xué)學(xué)報(bào) 2024年1期
張子軍, 張山, 王衍洋,3
(1.中國(guó)航空工業(yè)集團(tuán)公司 沈陽飛機(jī)設(shè)計(jì)研究所, 遼寧 沈陽 110035; 2.北京航空航天大學(xué) 航空科學(xué)與工程學(xué)院, 北京 100083; 3.北京航空航天大學(xué) 江西研究院, 江西 南昌 330096)
艦載機(jī)是航母戰(zhàn)斗力的主要來源,隨著技術(shù)的發(fā)展和現(xiàn)代戰(zhàn)爭(zhēng)任務(wù)的需要,無人機(jī)上艦成為未來海軍發(fā)展的必然趨勢(shì)。1991年“先鋒”艦載無人機(jī)成功用于海灣戰(zhàn)爭(zhēng)中,幫助美海軍掌握戰(zhàn)場(chǎng)主動(dòng)權(quán),在戰(zhàn)爭(zhēng)中大放異彩[1]。隨著雷達(dá)探測(cè)技術(shù)的發(fā)展,隱身性能成為無人機(jī)設(shè)計(jì)中的重要指標(biāo),飛翼布局的艦載機(jī)隱身性能好、氣動(dòng)效率高的優(yōu)點(diǎn)成為當(dāng)前各國(guó)研究的重點(diǎn)和難點(diǎn)[2]。2013年7月10日X-47B艦載無人機(jī)于“布什”號(hào)航母上成功進(jìn)行了海上阻攔著艦試驗(yàn),雖然后續(xù)X-47B無人機(jī)的研發(fā)被腰斬,但其為美海軍MQ-25黃貂魚艦載無人機(jī)的研制以及世界艦載無人機(jī)的發(fā)展起到了極大的推動(dòng)和借鑒作用,不難預(yù)測(cè),飛翼無人機(jī)必將成為艦載無人機(jī)的發(fā)展趨勢(shì)[3]。
相比有人艦載機(jī),無人艦載機(jī)在操縱過程中雖然可以不受駕駛員的情緒影響,但同樣需要解決有人艦載機(jī)遇到的問題,而且由于缺少了駕駛員的主動(dòng)操縱,實(shí)際著艦時(shí)可能面對(duì)各種突發(fā)的情況[1]。經(jīng)過多年的研究,飛翼無人機(jī)著艦控制技術(shù)取得了一些成果[4]。在控制系統(tǒng)設(shè)計(jì)方面,模型預(yù)測(cè)控制[5]、非線性動(dòng)態(tài)逆控制[6-7]、自適應(yīng)控制[8]、最優(yōu)預(yù)見控制[9]、總能量控制[10]、積分滑模控制[11]、反演控制[12]等多種控制方法以及強(qiáng)化學(xué)習(xí)等智能控制算法[13]被用于無人機(jī)的著艦控制系統(tǒng)設(shè)計(jì)中。
目前,各國(guó)對(duì)飛翼艦載無人機(jī)的研究還處在技術(shù)驗(yàn)證階段,研究大多只是針對(duì)引導(dǎo)系統(tǒng)進(jìn)行仿真研究,或?qū)刂葡到y(tǒng)進(jìn)行單獨(dú)設(shè)計(jì),缺少對(duì)無人機(jī)著艦安全方面系統(tǒng)性的研究[14]。為滿足艦載無人機(jī)實(shí)際上艦需要,本文針對(duì)無人機(jī)安全著艦問題研究的需要,建立了機(jī)-艦-環(huán)境-控制閉環(huán)綜合仿真系統(tǒng),定量研究不同海況下艦載無人機(jī)著艦安全變化趨勢(shì),并給出相應(yīng)著艦建議,為艦載機(jī)著艦決策提供參考。
1 機(jī)-艦-環(huán)境綜合模型
1.1 艦載無人機(jī)模型
美國(guó)空軍研究實(shí)驗(yàn)室為了實(shí)現(xiàn)未來艦載無人加油機(jī)的協(xié)同開發(fā),研發(fā)出了一款飛翼無人艦載機(jī)的等效模型“Equivalent Model Ⅱ (EQⅡ)”,該模型融合了ICE、X-45C和X-47B無人機(jī)的外形特點(diǎn),具有飛翼飛機(jī)的典型操穩(wěn)特性,以該等效模型為基礎(chǔ),進(jìn)行飛行動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)建模,該飛機(jī)的基本結(jié)構(gòu)數(shù)據(jù)如表1所示[15-16]。

表1 EQⅡ飛機(jī)基本參數(shù)Table 1 Basic data of EQ Ⅱ aircraft
飛機(jī)的操縱結(jié)構(gòu)如圖1,其共有3組操縱舵面,由外向內(nèi)分別為:阻力方向舵、外升降副翼、內(nèi)升降副翼,在縱向著艦的研究中,主要操縱舵面為內(nèi)升降副翼。

圖1 算例飛機(jī)結(jié)構(gòu)Fig.1 Example aircraft structure
按照飛行力學(xué)基本原理,以航跡角γ=-3°的定常下滑為基準(zhǔn)狀態(tài),建立該艦載無人機(jī)的縱向小擾動(dòng)線化模型,代入飛機(jī)參數(shù)可得狀態(tài)空間矩陣:


1.2 基于Conolly線性理論的甲板運(yùn)動(dòng)模型
目前對(duì)航母甲板運(yùn)動(dòng)建模多采用基于大量海上實(shí)驗(yàn)觀測(cè)擬合形成的正弦波法或功率譜法。其可以表征航母在某一特定海況下的甲板運(yùn)動(dòng)特性,但是一旦工況改變,運(yùn)動(dòng)模型將不再適用。為了討論不同因素(航速、航向、海況)對(duì)甲板運(yùn)動(dòng)的影響,本文采用Conolly線性理論建立通用甲板運(yùn)動(dòng)模型,其對(duì)于大型艦船低幅值運(yùn)動(dòng)具有較高的精度。
基于Conolly線性理論艦船橫搖運(yùn)動(dòng)的傳遞函數(shù)[17]:
式中:φ為艦船的橫搖角;ΔJφ為橫搖的附加轉(zhuǎn)動(dòng)慣量;D為艦船的排水量;hφ為橫穩(wěn)心高度;ωφ為艦船橫搖運(yùn)動(dòng)固有頻率;ζφ為橫搖阻尼因子。
縱搖運(yùn)動(dòng)的傳遞函數(shù):
式中:θ為艦船的縱搖角;ωθ為縱搖固有頻率;ζθ為縱搖阻尼因子;ΔJθ為縱搖的附加轉(zhuǎn)動(dòng)慣量;hθ為縱穩(wěn)心高度。
垂蕩運(yùn)動(dòng)的傳遞函數(shù):
式中:z為垂蕩運(yùn)動(dòng)位移;ωz為垂蕩固有頻率;ζz為垂蕩阻尼因子;λz為垂蕩運(yùn)動(dòng)附加質(zhì)量;Sw為水線面面積。
以尼米茲級(jí)重型航母為例,航母在航速Vship,遭遇角β=45°時(shí),分別于3級(jí)海況和5級(jí)海況下進(jìn)行仿真,結(jié)果如圖2。

圖2 基于Conolly理論的甲板運(yùn)動(dòng)仿真結(jié)果Fig.2 Simulation results of deck motion based on Conolly
1.3 艦尾流工程化模型
航母的幾何外形極不規(guī)則,造成的艦艉流場(chǎng)也很復(fù)雜,很難建立簡(jiǎn)單可靠的數(shù)學(xué)模型。為研究艦艉流對(duì)艦載機(jī)著艦的影響,對(duì)艦艉流的建模有CFD法、數(shù)據(jù)庫(kù)法和工程化方法等。目前實(shí)際應(yīng)用中效果較好、運(yùn)用較多的是美軍標(biāo)MIL-STD-1797A中規(guī)定的工程化建模方法。
在美軍標(biāo)MIL-STD-1797A中,艦艉氣流擾動(dòng)包括4部分[18-19]:自由大氣紊流分量(u1,v1,w1)、穩(wěn)態(tài)擾動(dòng)分量(u2,v2,w2)、周期性擾動(dòng)分量(u3,v3,w3)和隨機(jī)擾動(dòng)分量(u4,v4,w4),計(jì)算表達(dá)式為:
uw=u1+u2+u4
vw=v1+v4
ww=w1+w2+w3+w4
式中:u、v、w別為艦艉流在航母坐標(biāo)系x、y、z方向上的分量,在研究艦載機(jī)縱向著艦時(shí),只需對(duì)艦艉流x、z方向上的分量進(jìn)行建模。
按照美軍標(biāo)中艦艉流的建模方法,建立艦艉流綜合模型,5級(jí)海況下,艦載機(jī)進(jìn)近速度取70 m/s,甲板風(fēng)速Vwod=10.29 m/s(即20 kn),艦艉流仿真結(jié)果如圖3。

圖3 艦艉流綜合仿真結(jié)果Fig.3 simulation results of carrier air wake
2 全自動(dòng)著艦控制系統(tǒng)
無人艦載機(jī)不同于有人艦載機(jī),整個(gè)著艦過程需要依靠全自動(dòng)著艦系統(tǒng)(ACLS)自主完成。ACLS中的控制器可分為2類,1)自動(dòng)飛控系統(tǒng)(AFCS),2)自動(dòng)著艦的航跡引導(dǎo)系統(tǒng)。艦載無人機(jī)的全自動(dòng)著艦引導(dǎo)控制系統(tǒng)結(jié)構(gòu)如圖4所示。

圖4 ACLS系統(tǒng)結(jié)構(gòu)示意Fig.4 ACLS system structure
2.1 內(nèi)環(huán)增穩(wěn)器
優(yōu)秀的內(nèi)環(huán)品質(zhì)能使控制系統(tǒng)更好地發(fā)揮作用,為了使算例飛機(jī)達(dá)到飛行品質(zhì)要求,需要設(shè)計(jì)增穩(wěn)系統(tǒng),通過反饋迎角α和俯仰角速率q來改善飛機(jī)的短周期模態(tài)特性,其結(jié)構(gòu)如圖5所示。

圖5 增穩(wěn)系統(tǒng)結(jié)構(gòu)Fig.5 Structure of stabilizing controller
采用極點(diǎn)配置法對(duì)反饋增益Kα和Kq進(jìn)行求解,選擇目標(biāo)阻尼比0.707,短周期頻率3 rad/s,因此需要配置的目標(biāo)極點(diǎn)為-2.121 0±2.121 6 i,求得對(duì)應(yīng)的反饋增益Kα=-3.711 4,Kq=-1.500 2。
2.2 二階指令濾波
在飛行控制中,由于舵面偏轉(zhuǎn)的速率和幅值限制,指令信號(hào)會(huì)出現(xiàn)輸入飽和,在建模過程中需建立二階非線性指令濾波器,對(duì)指令信號(hào)加以大小、速率和帶寬的限制來生成平滑的指令信號(hào)[20]。
二階非線性指令濾波器的結(jié)構(gòu)如圖6所示,其狀態(tài)空間方程可表示為:

圖6 二階非線性指令濾波器結(jié)構(gòu)Fig.6 Second order nonlinear instruction filter structure
式中SM(·)和SR(·)分別代表幅值限制和速率限制。
2.3 自動(dòng)駕駛儀
自動(dòng)駕駛儀的功能是將飛機(jī)控制在指令姿態(tài)[21],其結(jié)構(gòu)如圖7所示。其工作原理是通過控制內(nèi)升降副翼偏角,減小指令信號(hào)與反饋的飛機(jī)狀態(tài)量的偏差,最終實(shí)現(xiàn)對(duì)飛機(jī)姿態(tài)的控制。

圖7 自動(dòng)駕駛儀結(jié)構(gòu)Fig.7 Autopilot structure
采用PID控制器(比例-積分-微分控制器)進(jìn)行飛機(jī)姿態(tài)控制,PID控制器的傳遞函數(shù)為:
搭建控制器模型,輸入指令姿態(tài)角,根據(jù)飛機(jī)的響應(yīng)曲線,調(diào)整相應(yīng)的PID參數(shù),使其滿足調(diào)節(jié)時(shí)間小于5 s,超調(diào)量不大于5%的時(shí)域準(zhǔn)則要求。
2.4 進(jìn)近動(dòng)力補(bǔ)償系統(tǒng)
艦載著艦時(shí)處于低動(dòng)壓狀態(tài),航跡角與速度的強(qiáng)烈耦合導(dǎo)致飛機(jī)處于不可控狀態(tài),因此需加入進(jìn)近動(dòng)力補(bǔ)償系統(tǒng)(APCS),改善飛機(jī)低動(dòng)壓狀態(tài)下的操縱性能。進(jìn)近動(dòng)力補(bǔ)償?shù)姆椒ㄖ饕斜3炙俣萔恒定和保持迎角a恒定2種方式,由于保持速度V恒定的動(dòng)力補(bǔ)償系統(tǒng)存在跟蹤靜差,目前大多采用的是保持迎角a恒定的方法,同時(shí)可以證明,保持迎角a恒定的動(dòng)力補(bǔ)償系統(tǒng)兼具保持速度V恒定的功能[22]。迎角a恒定APCS的結(jié)構(gòu)如圖8所示。
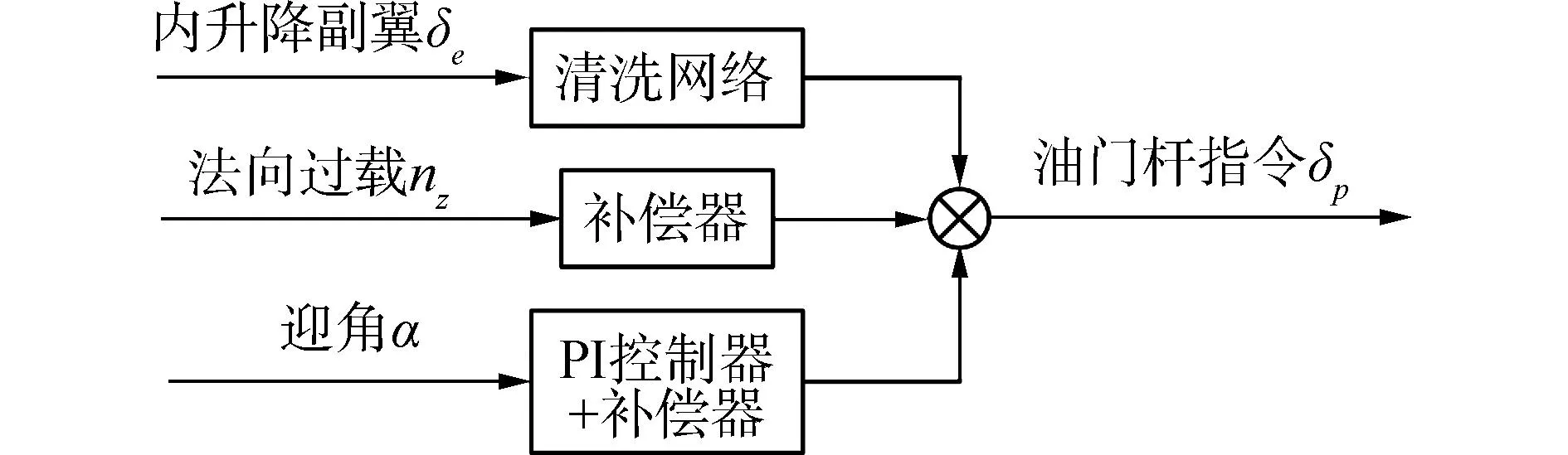
圖8 迎角恒定的APCS結(jié)構(gòu)Fig.8 APCS structure with constant angle of attack
其控制律可表示為:
式中:Tα為補(bǔ)償器時(shí)間常數(shù);Kα、Kαi分別為迎角PI控制器的比例系數(shù)和積分系數(shù);τ為清洗網(wǎng)絡(luò)的時(shí)間常數(shù);Kδ、Kn分別為內(nèi)升降副翼和法向過載的反饋系數(shù)。
2.5 引導(dǎo)控制律
著艦過程中,引導(dǎo)控制器需要根據(jù)離艦距離L(t)自動(dòng)計(jì)算出當(dāng)前位置對(duì)應(yīng)的理想高度,并與實(shí)際高度比較,生成高度指令信號(hào)Hc作為高度控制器的輸入,引導(dǎo)飛機(jī)減小與理想下滑軌跡的高度偏差。
在理想狀態(tài)下,艦載無人機(jī)相對(duì)母艦的水平速度為V0cosγ-Vship,則艦載無人機(jī)對(duì)艦下滑道斜率為tan(V0sinγ-Vship)),因此,在離艦距離L(t)處,對(duì)應(yīng)的理想高度H0為:
H0=L(t)×tan(V0sinγ/(V0cosγ-Vship))
相應(yīng)的高度指令信號(hào)Hc為:
Hc=H0-H+HDMC
式中:H為實(shí)際高度;HDMC為甲板運(yùn)動(dòng)補(bǔ)償高度。
3 不同海況條件下著艦安全分析
3.1 著艦性能指標(biāo)
航母甲板運(yùn)動(dòng)模型得到的是航母“搖蕩”中心(航母重心)的縱搖角、橫搖角和垂蕩高度,需要根據(jù)甲板幾何尺寸轉(zhuǎn)化為理想著艦點(diǎn)的位置變化。本文以CVN-68號(hào)尼米茲級(jí)航母為基礎(chǔ),建立甲板幾何模型,航母甲板的幾何尺寸以及航母重心、理想著艦點(diǎn)和攔阻索的位置關(guān)系如圖9所示。

圖9 CVN-68號(hào)航母甲板幾何尺寸示意Fig.9 Geometric size of CVN-68 aircraft carrier deck
航母甲板共有4道攔阻索,相鄰攔阻索間距為12 m,理想著艦點(diǎn)位于第2道攔阻索與第3道攔阻索中間。根據(jù)美海軍自動(dòng)著艦系統(tǒng)指導(dǎo)手冊(cè),結(jié)合其他相關(guān)文獻(xiàn),艦載機(jī)著艦安全條件整理為[23-25]:
1)著艦點(diǎn)縱向偏差:其范圍為理想值-6 m~6 m,允許值-12 m~12 m;
2)最大下沉速度:受艦載機(jī)起落架強(qiáng)度限制,觸艦時(shí)沖擊載荷不能過大,最大下沉速度限制為4~5 m/s;
3)凈空安全高度:為保障母艦與艦載機(jī)的安全,在艦載機(jī)飛至母艦艦艉時(shí),要求飛機(jī)與甲板之間至少有3~3.66 m的凈空安全高度,且超過6 m時(shí)應(yīng)執(zhí)行逃逸復(fù)飛;
4)下滑航跡偏差:艦載機(jī)在沿下滑道進(jìn)近的過程中會(huì)受到艦艉流的擾動(dòng),造成艦載機(jī)偏離理想下滑軌跡,根據(jù)文獻(xiàn)[25]中提出的評(píng)價(jià)指標(biāo),采用“理想值”和“允許值”2級(jí)指標(biāo),理想值小于2 m,允許值小于4 m;
5)著艦成功率:美海軍自動(dòng)著艦系統(tǒng)指導(dǎo)手冊(cè)中對(duì)著艦成功率的要求為:“理想值”應(yīng)大于80%,“允許值”為65%~85%。
3.2 艦載機(jī)著艦過程仿真
基于建立的機(jī)-艦環(huán)境綜合模型和全自動(dòng)著艦控制系統(tǒng),設(shè)定海況等級(jí)5級(jí),艦船航速10 kn,艦船遭遇角45°,在進(jìn)艦前12.5 s接入甲板運(yùn)動(dòng)補(bǔ)償指令,艦載機(jī)進(jìn)近著艦軌跡如圖10和圖11所示。
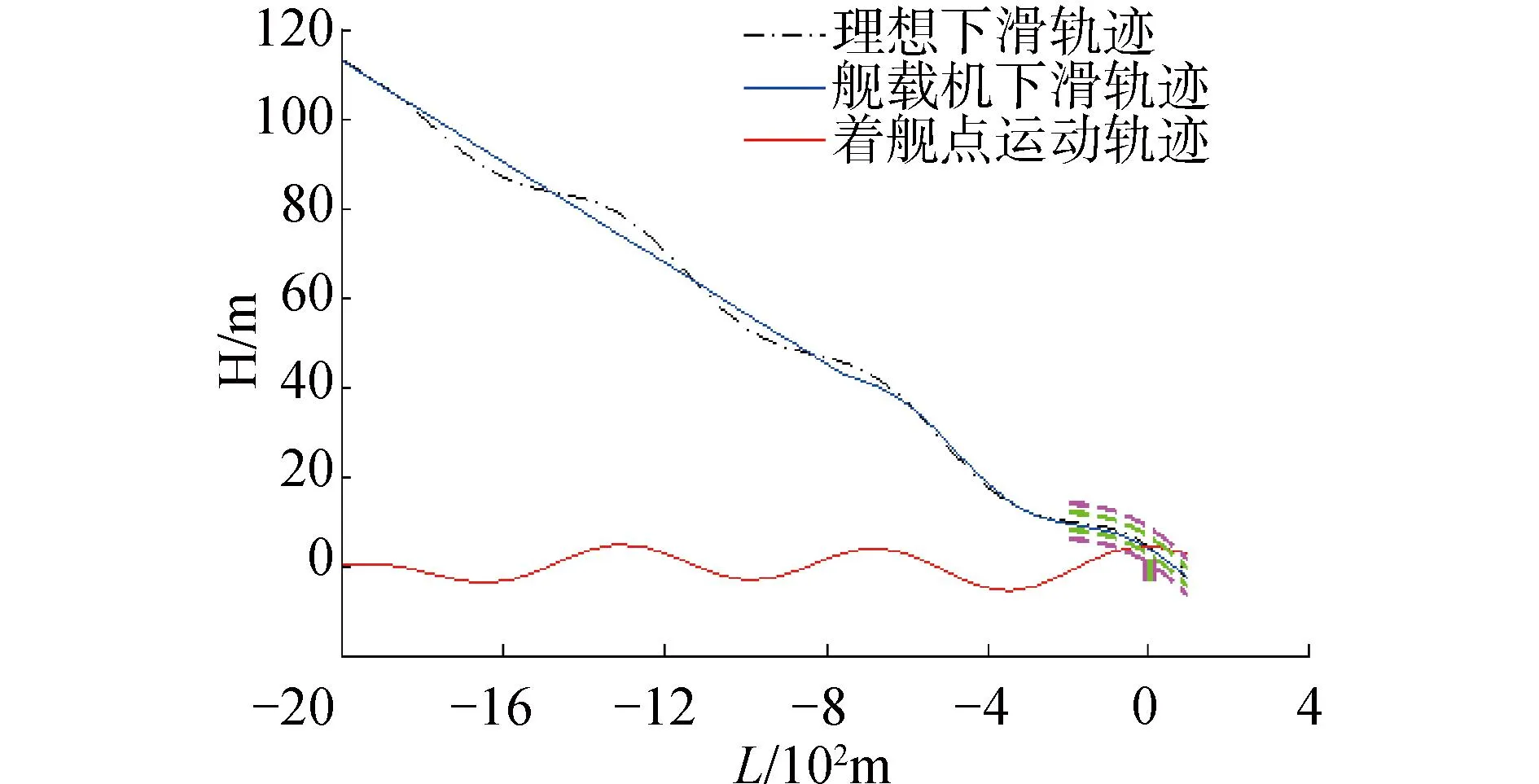
圖10 艦載機(jī)對(duì)理想下滑軌跡跟蹤情況Fig.10 Tracking of target glide trajectory for UAV

圖11 艦載機(jī)著艦點(diǎn)位置放大圖Fig.11 Enlarged view of landing point of UAV
甲板運(yùn)動(dòng)補(bǔ)償系統(tǒng)在離艦距離約900 m時(shí)開始工作,在著艦前艦載機(jī)能準(zhǔn)確跟蹤著艦點(diǎn)的高度變化,從圖11中可以看出,艦載機(jī)下滑航跡始終位于理想邊界內(nèi),著艦點(diǎn)位于理想著艦點(diǎn)之前約8 m,在允許范圍內(nèi)。
由于航母甲板運(yùn)動(dòng)和艦艉流擾動(dòng)的隨機(jī)性,即使在相同條件下每次著艦仿真的結(jié)果也不盡相同,圖12是相同條件下仿真1 000次的著艦點(diǎn)散布圖,其中成功著艦671次,失敗329次,著艦成功率67.1%。
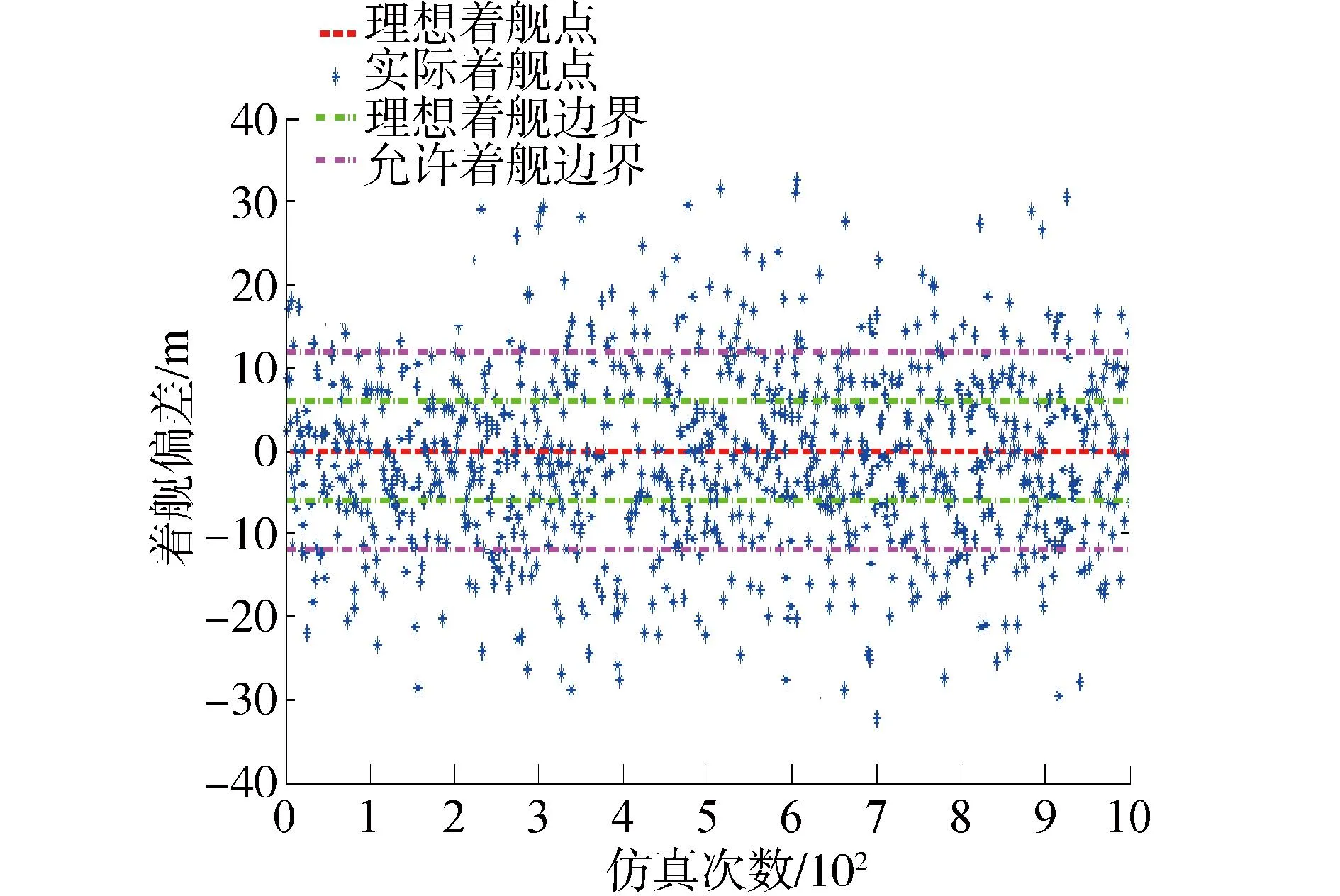
圖12 仿真1 000次著艦偏差散布Fig.12 Dispersion chart of simulated 1 000 landing errors
3.3 不同海況條件下安全著艦范圍
3.3.1 5級(jí)海況下的著艦限制范圍
艦載機(jī)在進(jìn)近著艦時(shí)為了縮短著艦距離,一般采用“逆風(fēng)著艦”的方式。在進(jìn)行甲板著艦作業(yè)時(shí),航母要根據(jù)海上風(fēng)向,適時(shí)調(diào)整艦船的行駛速度和角度,以滿足甲板風(fēng)的要求,因此艦船狀態(tài)仿真范圍選擇如表2 所示。

表2 仿真船速和遭遇角范圍Table 2 Range of ship speed and angle of encounter
以5級(jí)海況為例,取仿真1 000次結(jié)果計(jì)算著艦成功率,所得結(jié)果如圖13所示。

圖13 5級(jí)海況下艦載無人機(jī)著艦仿真結(jié)果Fig.13 Landing simulation results of carrier based UAV under level 5 sea condition
圖中,根據(jù)海況風(fēng)浪對(duì)照表,5級(jí)海況屬于高浪級(jí)別的較高海況,海面伴有6級(jí)強(qiáng)風(fēng),平均波高2.1~3.0 m。從圖13中著艦安全仿真結(jié)果可以看出,在該海況條件下,為最大程度上提高著艦成功率,航母航行速度應(yīng)大于13 kn,這是因?yàn)楹侥傅暮剿僭黾?艦載無人機(jī)相對(duì)母艦的速度越小,更有利于航跡控制,并且在相同海況和遭遇角下,航速越快,艦船的橫搖、縱搖和沉浮運(yùn)動(dòng)越弱[17],理想著艦點(diǎn)高度變化幅值更小,著艦精度較高。
但與此同時(shí),如圖14所示,隨著航母行駛速度的提高,艦艉流擾動(dòng)更加強(qiáng)烈,不利于著艦控制,因此在圖中當(dāng)速度超過20 kn后,著艦成功率反而開始下降。綜合考慮各因素對(duì)著艦安全的影響,5級(jí)海況下,最佳著艦的航速限制范圍為13 kn≤Vship≤20 kn。

圖14 不同航速下艦艉流對(duì)著艦過程的擾動(dòng)效果Fig.14 Effect of airwake disturbance on carrier landing at different speeds
3.3.2 不同海況下的著艦限制范圍
分別取1~9級(jí)海況,船速和遭遇角仿真范圍參照表2,所得結(jié)果如圖15所示。
1級(jí)海況時(shí),全航速均滿足“理想值”著艦成功率大于80%的要求。
2級(jí)海況時(shí),雖然全航速均滿足“理想值”著艦成功率要求,但相較于 1 級(jí)海況,著艦成功率顯著降低,建議著艦作業(yè)航速取8 kn≤Vship≤26 kn,能達(dá)到85%以上著艦成功率。
3級(jí)海況時(shí),在航速Vship≤20 kn時(shí)能滿足著艦成功率大于80%的要求,但在航速小于10 kn著艦成功率較低。
隨著海況等級(jí)的提高,安全航速范圍逐漸減小,當(dāng)海況達(dá)到6級(jí)及以上時(shí)全航速均不滿足安全著艦要求,不建議進(jìn)行著艦作業(yè)。
綜上,根據(jù)圖15中仿真結(jié)果可整理得到不同海況下艦載無人機(jī)的安全著艦范圍,如表3所示,需要說明的是受模型限制,本文只研究艦載無人機(jī)進(jìn)近和著艦過程的安全,在實(shí)際著艦作業(yè)尤其是高海況作業(yè)時(shí),需要綜合考慮人員安全、設(shè)備工作條件等限制。

表3 不同海況下艦載無人機(jī)安全著艦范圍Table 3 Safe landing range of carrier based UAV under different sea conditions
4 結(jié)論
1) 采用Conolly線性理論建立的甲板運(yùn)動(dòng)模型能夠給出甲板運(yùn)動(dòng)與海況的關(guān)聯(lián)參數(shù),方便進(jìn)行不同海況條件艦載無人機(jī)著艦仿真計(jì)算,模型精度較高;
2)在高海況條件下,航母可通過適當(dāng)加快航速以提高著艦成功率,但高航速會(huì)加劇艦艉流擾動(dòng),不利于飛機(jī)著艦,在著艦時(shí)應(yīng)綜合考慮甲板運(yùn)動(dòng)與艦艉流的影響以確定航母運(yùn)動(dòng)狀態(tài)。本文給出的不同海況下艦載無人機(jī)的安全著艦范圍,為無人機(jī)著艦決策提供了參考;
3)后續(xù)可以開展無人機(jī)著艦橫側(cè)向控制律設(shè)計(jì)研究,擴(kuò)大航母遭遇角的研究范圍。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
