轉軸多維動態參數端面視覺測量方法
2024-01-12 13:55:14鄭育江鐘舜聰鐘劍鋒劉東明伏喜斌陳新偉
測控技術 2023年12期
鄭育江, 鐘舜聰, 鐘劍鋒*, 劉東明, 伏喜斌, 陳新偉
(1.福州大學 機械工程及自動化學院,福建 福州 350108; 2.廈門市特種設備檢驗檢測院,福建 廈門 361004;3.閩江學院 計算機與控制工程學院,福建 福州 350121)
轉子系統是旋轉機械的重要組成部分,轉子的狀態參數監測是實現旋轉機械可靠性和安全性評估的重要技術之一。其中轉速和振動信息是反映旋轉設備運行狀態的關鍵參數[1]。目前,主要通過接觸式和非接觸式測量方法來獲取轉子的振動和轉速信息。接觸式傳感器(如加速度傳感器、位移傳感器、接觸式的轉速計等)都需要安裝于待測結構上,不可避免地會對被測結構的動態特性產生影響。非接觸測量方法可在不直接與振動結構接觸的情況下獲取結構的動態參數,可提高測量準確性[2],應用場景更加廣泛。
轉軸轉速測量技術已較為成熟,如現在已有精度較高的電磁式、光電式轉速計等[3]。但磁性轉速計需在待測物體上安裝磁體,光電式轉速計在多塵的環境中測量效果不佳[4]。而視覺轉速測量技術作為一種新型的非接觸測量方法,能夠通過相應的圖像處理技術獲取被測對象的多種動態參數,具有測量精度高、系統結構簡單等優勢,因此得到許多研究者的關注。張曉川等[5]通過像素點的位移搜索和亞像素位移擬合方法實現電機轉速參數的測量。Kim等[6]通過檢測RGB圖案連續2幀之間的顏色變換速度獲取高分辨率的旋轉角信息。Guo等[7]基于模板Lucas-Kanade算法,對視頻序列中的模板圖像進行對齊來實現旋轉角的精確提取。
針對轉軸三維振動位移的測量,目前大多數研究者常采用非接觸式測量裝置,例如電渦流傳感器、激光位移傳感器等。邊忠國等[8]在轉子回轉表面加工臺階,實現了轉子軸向位移的測量。朱永生等[9]利用激光傳感器從轉子的徑向監測條碼位置,實現了轉子軸向位移的測量。隨著圖像處理技術和成像設備的快速發展,越來越多的研究者將其應用于結構的振動測量[10-11]。這種方法通過相機捕捉結構的自然特征,或將預先設定的目標圖案貼在結構表面,通過相機對其連續成像再利用圖像處理技術獲取結構的振動、形變、三維形貌等信息[12-13]。其中,圖像對比追蹤算法[14]、數字圖像相關算法[15]、特征匹配算法[16]是視覺檢測常用的技術。Ye等[17]利用灰度模式匹配、彩色模式匹配和均值漂移跟蹤等圖像處理算法測量拱橋的振動位移。陳忠等[18]搭建雙目視覺系統并結合三維數字散斑圖像相關方法,實現了結構的全場振動測量。徐超等[19]利用數字圖像相關方法實現了大柔性結構振動位移測量。
以上通過視覺測量方法檢測轉子的動態信息大多只針對轉子某一維度動態信號進行單獨測量,而大多數單目視覺系統只能獲取轉子某一維度的信息,要想獲取轉子多維參數信號則需采用多目視覺系統和相關的圖像匹配算法進行分析處理,這樣便大幅增加了算法的復雜度和設備成本。Zhong等[20]設計了一系列非干涉式位感條紋作為特征標靶圖案,并將條紋粘貼于轉軸圓周表面,采用單目視覺系統實現了轉軸的三維振動位移和轉速的測量。該測量方法需要將位感條紋粘貼于轉軸的圓周表面,但在一些場合,轉軸的圓周表面不便于粘貼上述條紋。因此,本文結合位感條紋的相關理論研究,提出一種轉軸三維振動位移和轉動參數端面視覺同步測量新方法,為具有平整端面的旋轉零部件三維振動位移和轉速測量提供了一種新思路。
1 系統組成及原理
1.1 系統組成
基于端面特征圖案的轉軸三維振動位移和轉速測量系統如圖1所示。該測量系統主要由標靶圖案、高速相機和電腦組成。將標靶圖案粘貼于轉軸端面,用于感知轉軸的三維振動和轉速信息;高速相機對標靶圖案連續成像;電腦通過數據傳輸線控制高速相機并處理拍攝得到的圖像序列。
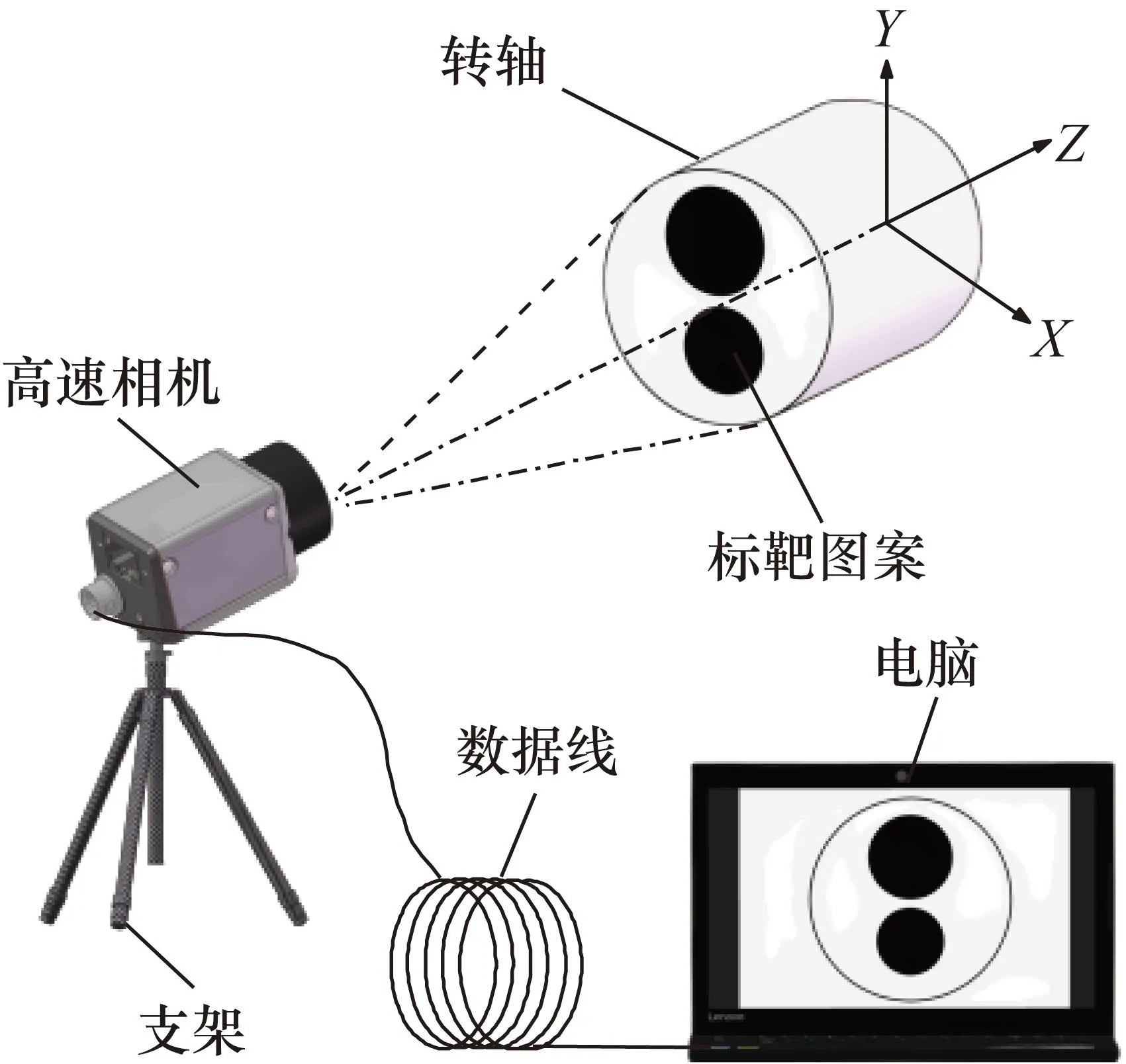
圖1 轉軸三維振動位移和轉速測量系統
該測量系統的三維測量坐標定義為:Z軸為沿成像光軸方向,Y軸為豎直方向,X軸為水平方向。標靶圖案由MATLAB軟件代碼生成,樣式如圖1所示,白色背景圓形圖案內部有2個半徑大小不一的黑色圓,各圓形圖案直徑可根據實際待測轉軸的軸徑大小進行調整。生成的標靶圖案通過打印機打印至背膠紙上,并將其粘貼且完全覆蓋于轉軸的端面。最后調整相機焦距、物距等參數,使標靶圖案清晰成像。
1.2 轉軸端面標靶圖案圖像處理
本文獲取轉軸動態信息的關鍵是通過圖像處理技術擬合出標靶圖案上的特征圓,進而得到特征圓的圓心坐標和半徑參數,結合系統的成像關系計算轉軸的三維振動位移和轉速。而拍攝得到的目標圖案不可避免地會混雜周圍環境的信息,當背景信息復雜且與目標區域的灰度差異不明顯時,不利于后續圖像特征信息識別和提取。因此本文通過以下方法對特征區域信息進行加強:① 通過功率10 W的環形LED光源直接照射轉軸端面標靶圖案來提高目標區域與環境的對比度,同時通過視覺相機調節成像對比度和亮度,初步減少背景信息,圖2(a)所示的自然光下的圖片經過對比度優化后如圖2(b)所示;② 對采集的標靶圖案進行降噪、二值化等操作進一步增強圖像的對比度,從而過濾掉與轉子區域無關的背景信息,經圖像處理后的二值化圖像如圖2(c)所示,可見經預處理后的圖像邊緣特征明顯,并有效地去除了圖像的背景信息。
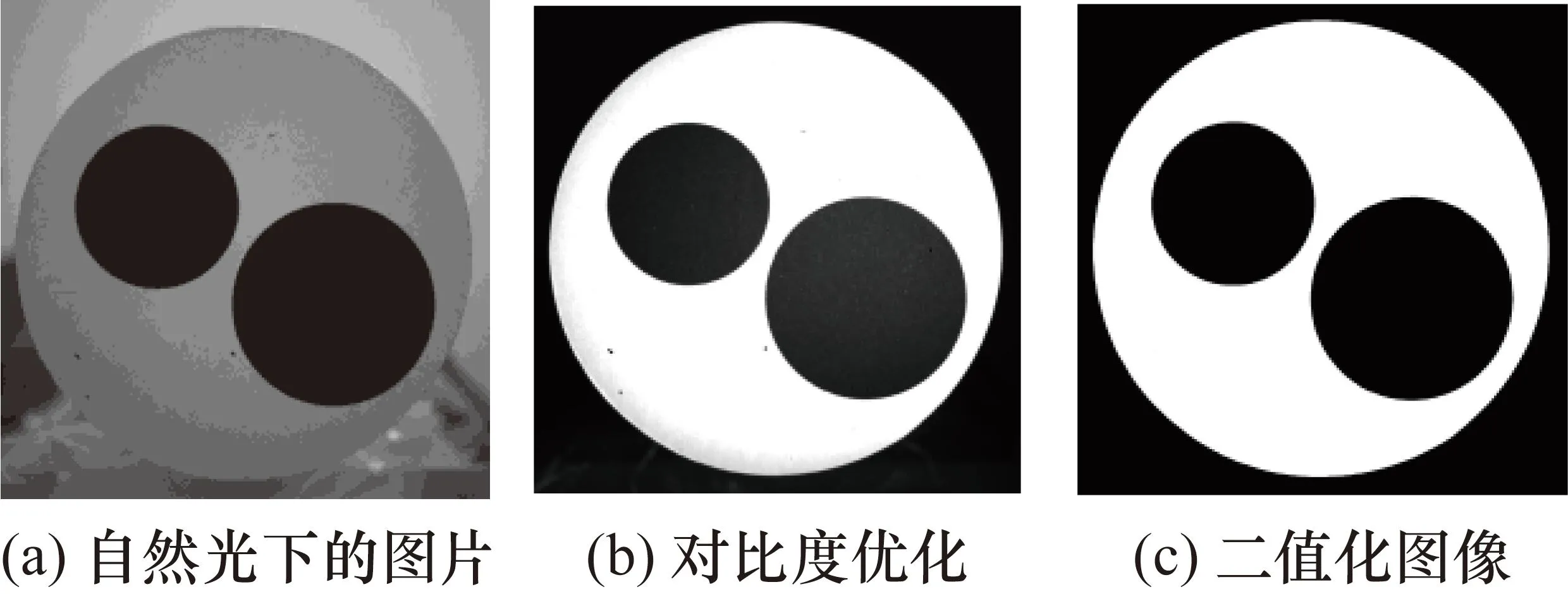
圖2 標靶圖案對比度優化及圖像預處理
最小二乘法是一種數學優化技術,它通過最小化誤差的平方和找到一組數據的最佳函數匹配。若被測對象邊緣輪廓清晰,最小二乘法可實現亞像素級別的精確擬合定位。
為了從圖3(a)所示的原始圖案中獲取圖3(b)所示的高精度的圖像邊緣輪廓,本文采用基于Zernike矩的亞像素邊緣檢測算法對特征圖案的輪廓進行亞像素邊緣檢測,從而得到特征圖案輪廓的亞像素坐標集。最后采用最小二乘法對像素坐標集進行擬合,從而獲得特征參數。擬合得到3個圓如圖3(c)所示,3個圓的半徑從小到大為r1、r2和r3,對應的圓分別為O1、O2和O3。其中,O3對應的即為轉軸端面的輪廓圓,r3為轉軸半徑。通過這些輪廓圓的圓心坐標和半徑變化信息結合所提出的位移計算公式即可計算出真實的轉軸三維振動位移和轉速。
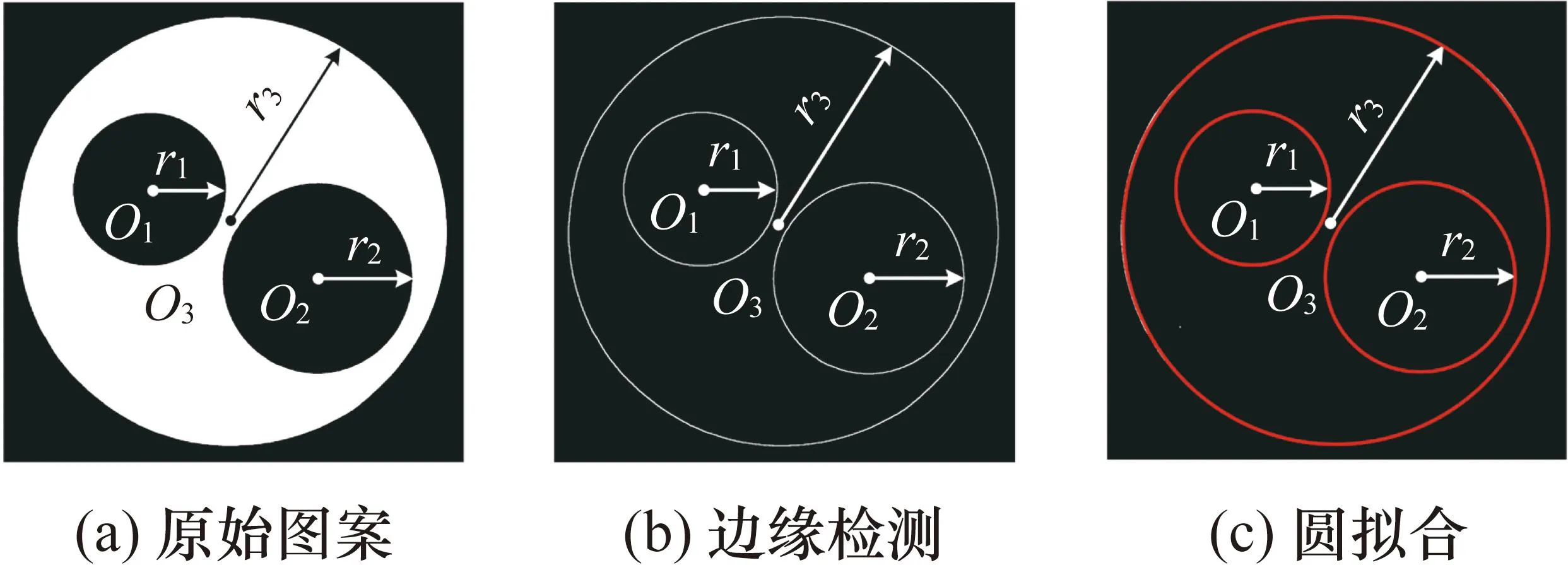
圖3 標靶圖案特征參數獲取
1.3 Z方向的位移測量原理
當轉軸沿Z方向有位移時,成像傳感器上O3的半徑大小也會發生變化,轉軸Z方向位移測量原理圖如圖4所示,根據圖4中的三角關系可知,在t時刻,物距D、像距F、位移Δz、轉軸實際半徑R、成像輪廓圓的半徑r(t)之間的關系為
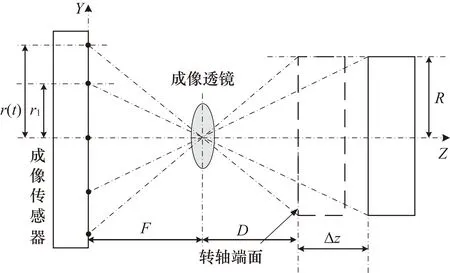
圖4 轉軸Z方向位移測量原理
(1)
(2)
將第一幀作為參考幀,r1為參考幀圓O3的半徑,r(t)為t時刻O3的半徑,將式(1)代入式(2)化簡得Z方向的位移計算公式,即
(3)
1.4 X和Y方向的位移測量原理
由于X和Y方向位移測量是利用標靶圖案圓心參數的變化獲得的,下面介紹X方向測量原理,Y方向測量原理可類比推得。當轉軸沿X方向有位移時,可通過求取O3圓心橫坐標的變化信息獲得該位移,其測量原理如圖5所示,由成像關系可得:
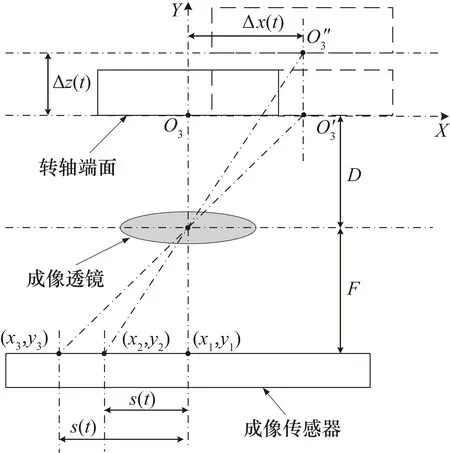
圖5 轉軸沿X方向位移測量原理
(4)

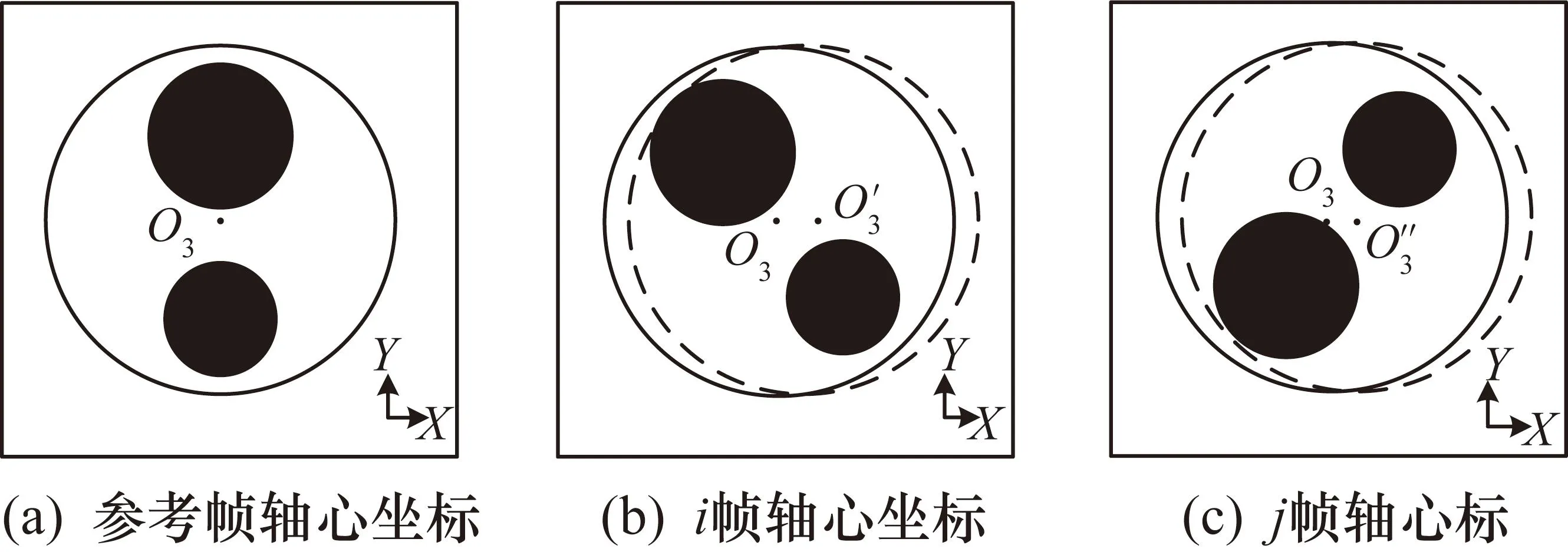
圖6 不同時刻轉軸軸心位置變化
(5)
又根據該測量系統的成像比例關系可知,D和F之間的關系為
(6)
式中:R為轉軸的實際半徑長度;a為單個像素點的寬度;NR為O3的半徑在圖像傳感器上所覆蓋的像素點個數,將式(6)代入式(5)得
(7)
(8)
將式(7)代入式(8)化簡得:
(9)
式(9)即是轉軸在X和Z方向同時運動時,X方向位移的最終表達式。
1.5 轉軸端面轉速測量原理
轉軸在旋轉過程中,標靶圖案中2個特征圓的圓心連線斜率將發生變化,如圖7所示,通過求取兩坐標連線斜率的反正切值,可得到每一時刻的傾斜角。設t時刻,成像傳感器上O1和O2的圓心坐標分別為(xt1,yt1)和(xt2,yt2),則t時刻O3圓心橫、縱坐標與參考時刻的差值為
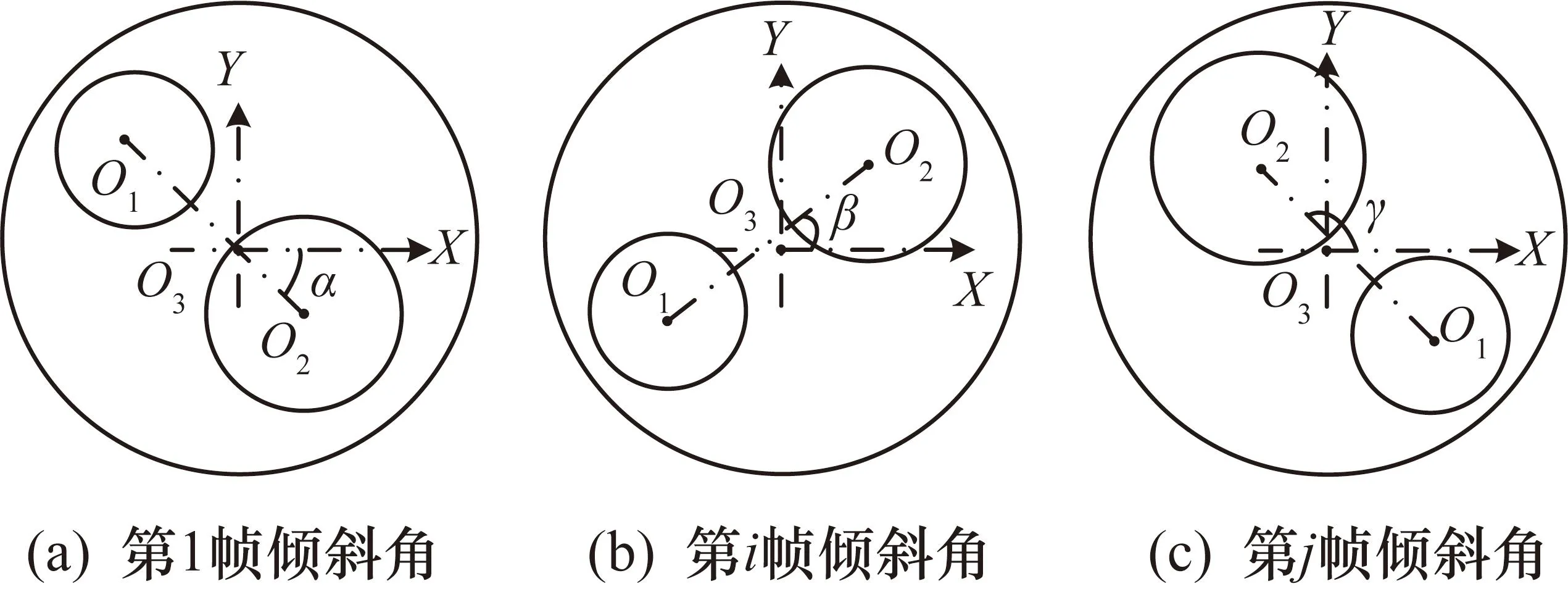
圖7 轉軸旋轉時傾斜角變化示意圖
(10)
式中:Xt和Yt為t時刻O1和O2的橫、縱坐標差。為避免斜率不存在的情況,定義t時刻傾斜角θ(t)為
(11)
通過式(11)即可獲取相鄰兩幀之間的角位移,進而可求取兩幀之間的角速度w(t):
(12)
式中:Fs為高速相機的采樣幀率,此時轉軸的轉速表達式為
(13)
本文角位移曲線是通過傾斜角的反正切值得到的,使得轉角角位移曲線將包裹在π和-π之間,此時角位移曲線將存在突變情況。為解釋這一現象,通過用SolidWorks軟件的成像模塊模擬采集轉軸轉速在300 r/min的端面標靶圖案,模擬中相機的采樣幀率為100 f/s。經圖像處理后,得到順時針和逆時針旋轉下的角位移曲線如圖8(a)所示。因轉速通過角速度求得,通過未解包裹的角位移曲線求得的角速度曲線存在圖8(b)所示的突變。因此需要對采集到的角位移曲線進行解裹,解裹后的角位移曲線得到的角速度曲線如圖8(c)所示,最后結合式(13)即可得到轉軸轉速變化時域曲線。
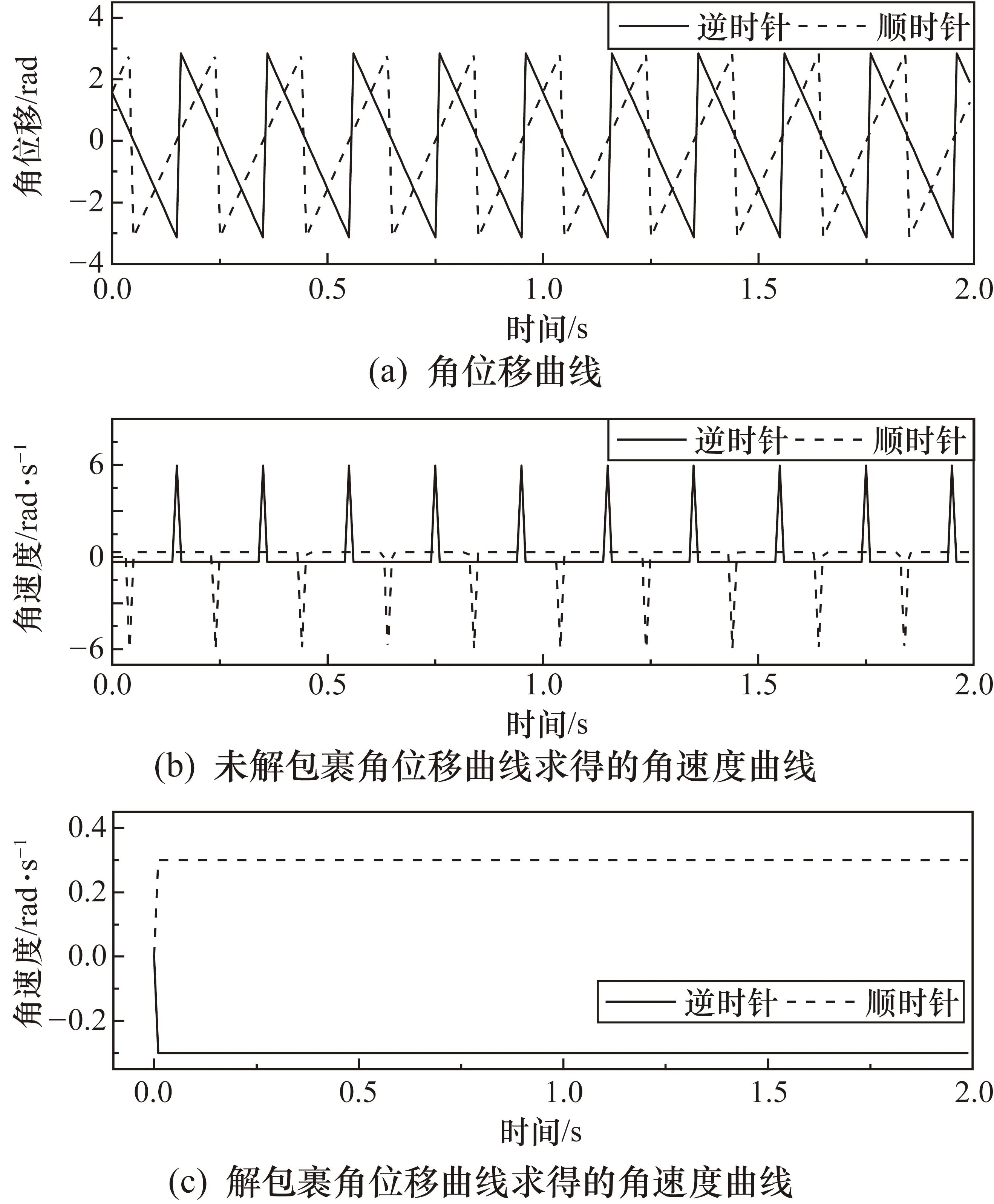
圖8 轉速為 300 r/min模擬測量結果
2 測量系統性能分析
2.1 轉軸三維振動位移和轉速測量性能模擬
為了探究所提出的測量系統位移和轉速測量性能,采用SolidWorks軟件建立轉軸三維模型,并在轉軸端面設置標靶圖案,通過成像模塊對轉軸的三維振動和轉動進行模擬。在轉軸三維振動位移模擬實驗中,相機的幀率為50 f/s,圖像的分辨率為960 px×960 px,軸的三維方向設置振幅為20 μm、頻率5 Hz的往復振動位移,轉軸轉速為500 r/min,采樣時間設置為6 s,并用模擬測量得到的位移與標準位移的平均絕對誤差(Mean Absolute Error,MAE)對測量結果進行評價。根據三維振動位移測量理論得到的轉軸三維振動位移模擬結果如圖9(a)所示,從模擬結果可以看出X和Y方向的計算位移測量精度高于Z方向,X、Y和Z方向測量的位移與標準位移之間的平均絕對誤差分別為0.12%、0.13%和0.19%。
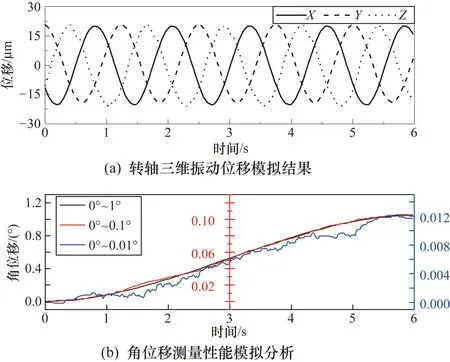
圖9 轉軸三維振動位移和轉速測量性能模擬分析
在轉速測量實驗中,角位移分辨率是衡量系統轉速測量性能的評價標準,因此采用上述三維振動位移模擬實驗建立的模型和成像模塊模擬測量轉軸從0°~1°、0°~0.1°和0°~0.01°的角位移,相機的采樣幀率為50 f/s,測量結果如圖9(b)所示,可以看出本文測量系統的角度測量分辨率優于0.1°。
2.2 標靶圖案成像偏差對測量精度的影響
由視覺系統成像特性可知,當相機平面與轉軸端面在X或Y平面不平行時,成像傳感器上的圓形特征圖案將呈現橢圓特征,下面就針對相機成像鏡頭在X和Y平面偏轉對三維振動位移和轉速測量精度的影響進行分析。
模擬實驗中,通過SolidWorks軟件對轉軸端面模擬成像,將相機的成像鏡頭分別在X和Y平面偏移1°~10°,每一組模擬采集端面標靶圖案250幅圖片;相機的采集幀率為50 f/s、圖像分辨率為960 px×960 px,轉軸轉速為500 r/min,計算相機鏡頭在不同偏轉角下轉軸的位移和轉速同步測量結果與標準值的平均絕對誤差。位移標準差模擬結果如圖10(a)和圖10(b)所示,可以看出X、Y和Z方向的位移測量誤差隨著相機偏轉角的增大而增大,Z方向的位移測量精度受相機鏡頭偏差的影響大于X和Y方向。而根據圖10(c)轉速標準差模擬結果可知,隨著相機鏡頭偏轉角度的增大,轉速測量誤差也隨之增大,在鏡頭偏轉為1°和2°時,Y平面偏轉造成的轉速測量誤差分別為0.09%和0.113%,而X平面偏轉造成的誤差為0.059 2%和0.186%,因此小角度的相機偏轉對系統測量誤差影響較小,實際測量中應盡可能保持相機成像平面和端面平行,以減小測量誤差。
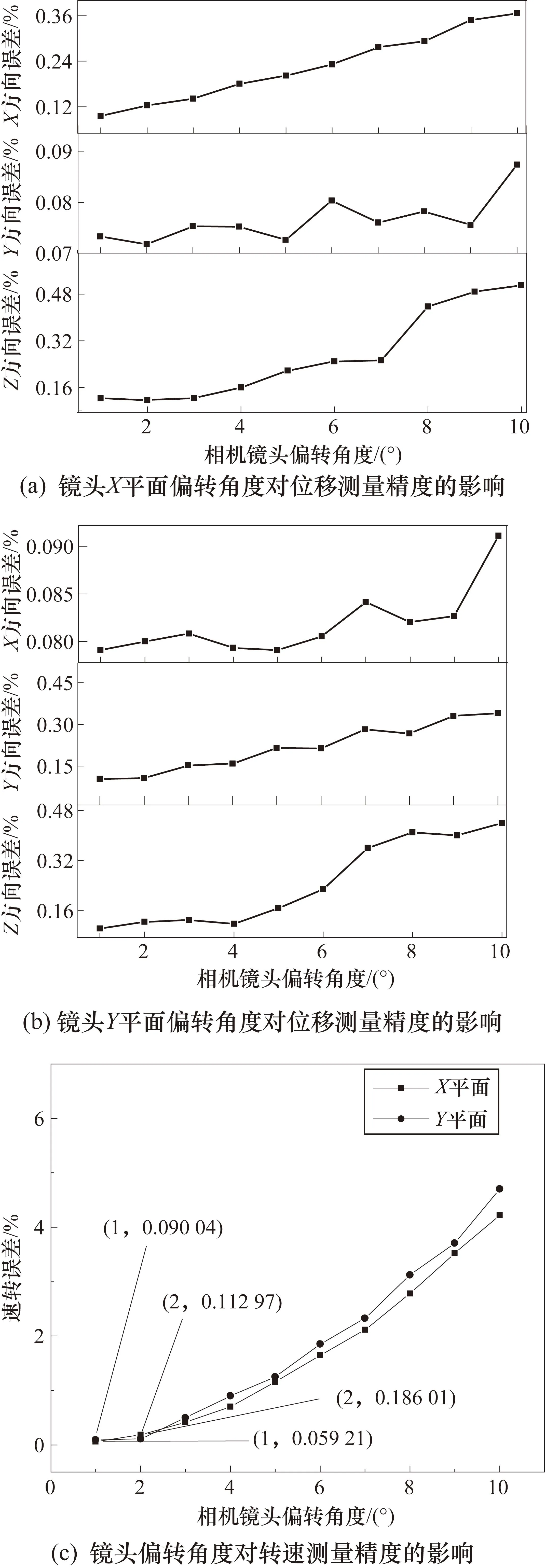
圖10 相機鏡頭偏轉角度對系統測量精度的影響分析
2.3 圖像質量和曝光時間對測量精度的影響
標靶圖案是否清晰將直接影響系統的測量精度。高速相機捕捉到的目標圖案質量由目標圖案本身的打印質量和系統的成像質量決定。標靶圖案的打印質量可通過采用高質量的打印機來保證,系統的成像質量的影響因素有相機拍攝幀率、成像的分辨率、曝光時間和周圍光照環境等。為分析圖像的分辨率和信噪比對轉軸的三維振動位移測量的影響,在轉軸仿真模型端面設置標靶圖案,分別采集分辨率為480 px×480 px和1 280 px×1 280 px的2組轉軸端面標靶圖案序列,每組200幅。向2組圖像序列中加入10~90 dB量級的高斯白噪聲,然后根據所提出的轉軸三維振動位移和轉速測量算法計算不同噪聲量級下的標準偏差來計算測量的不確定度,其位移和轉速的標準差模擬結果如圖11所示。在分辨率相同的情況下,測量系統在3個方向上的位移不確定度會隨著所獲取圖像信噪比的增加而降低。同時對比圖11(a)和圖11(b),可知增加圖像的分辨率也可減小各個方向位移測量的不確定度。從3個方向位移的不確定度來看,Z方向位移的不確定度相比于X和Y方向受圖像質量的影響更大。而從圖11(c)可知,當圖像分辨率一定時,隨著信噪比的增加轉速測量的不確度減小,且增加圖像分辨率也可減小轉速測量的不確定度。因此,提高圖像質量可提高測量性能。
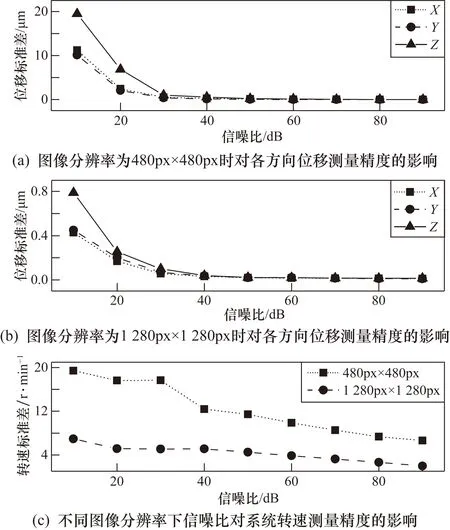
圖11 圖像分辨率和信噪比對系統位移和轉速測量精度的影響
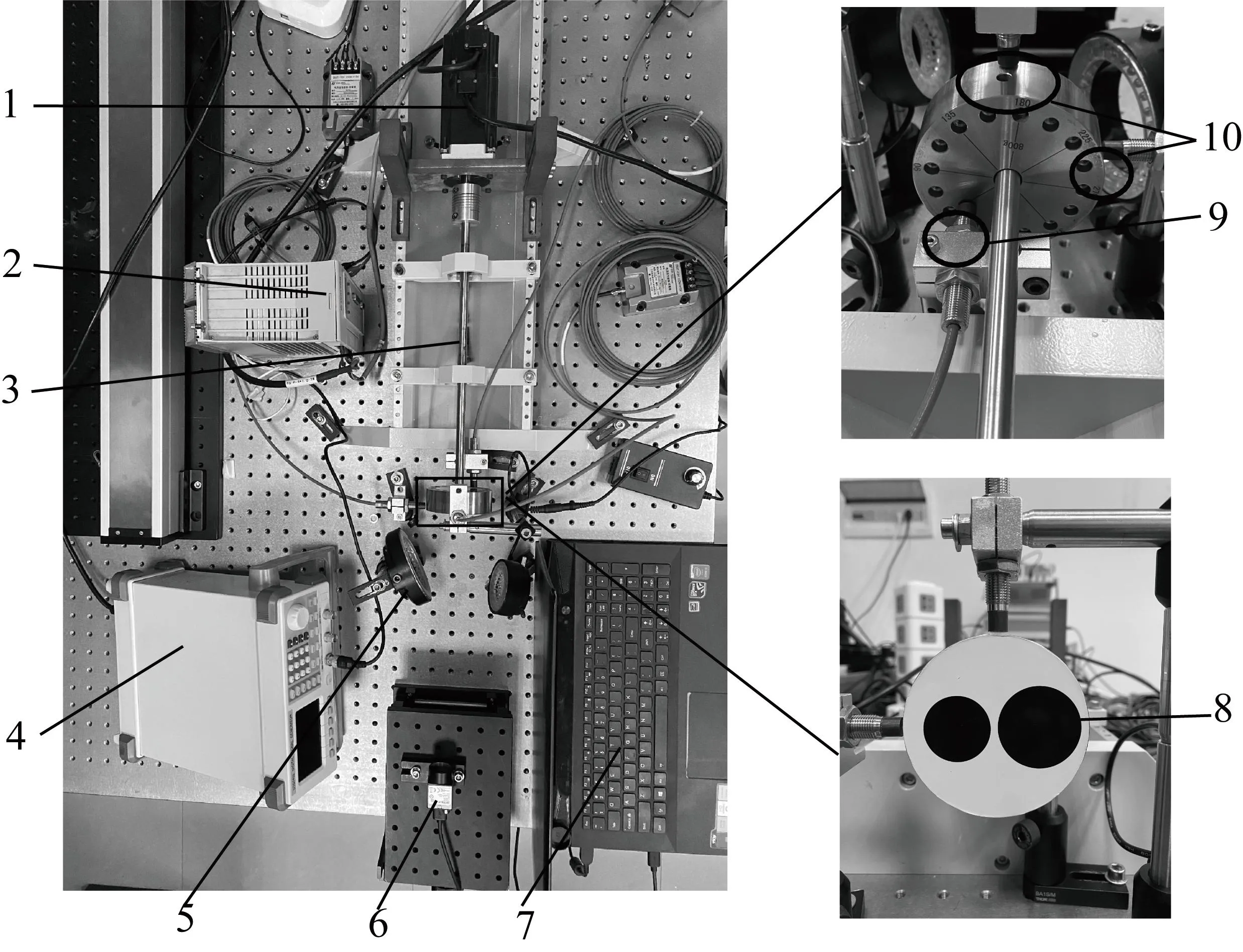
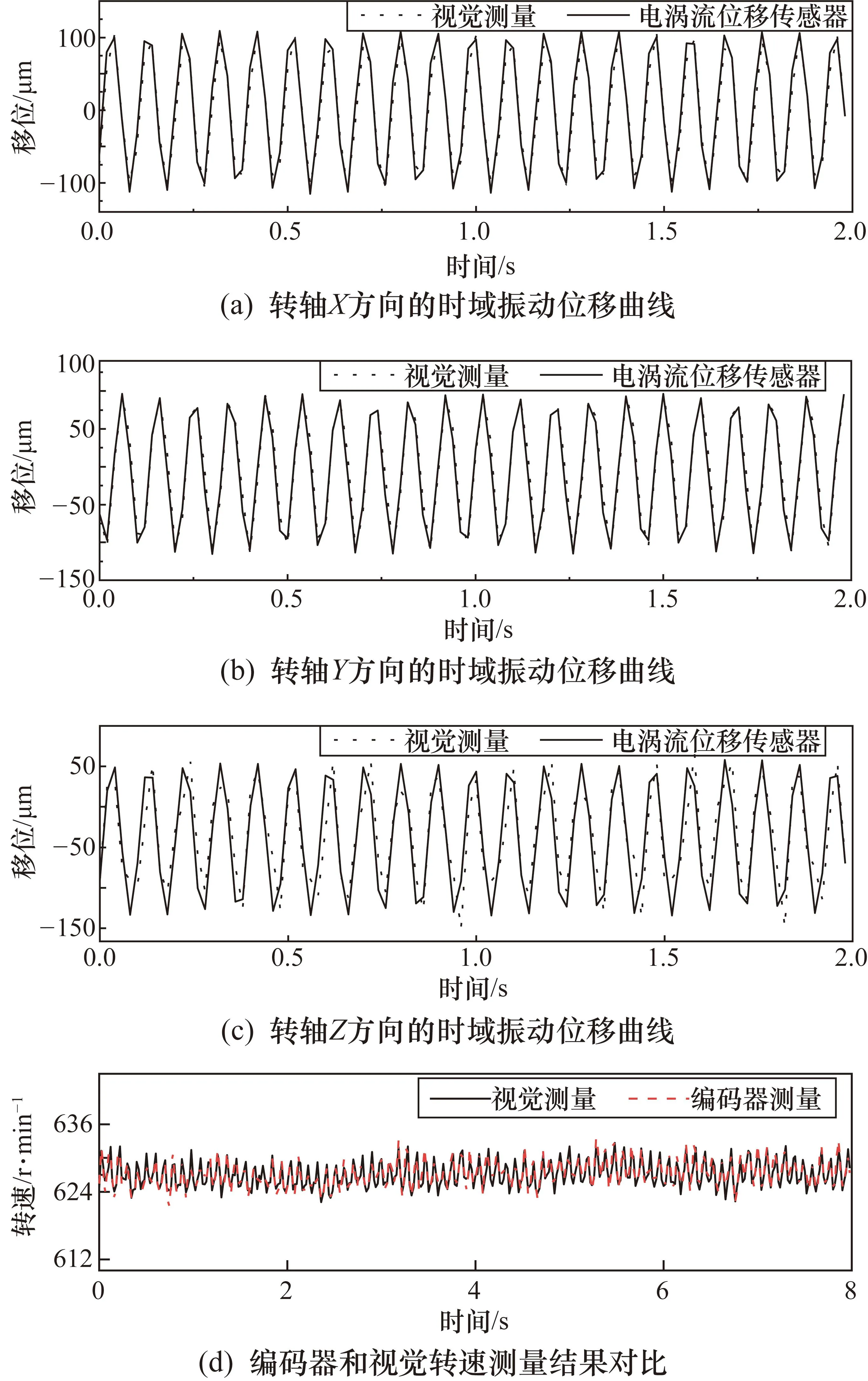
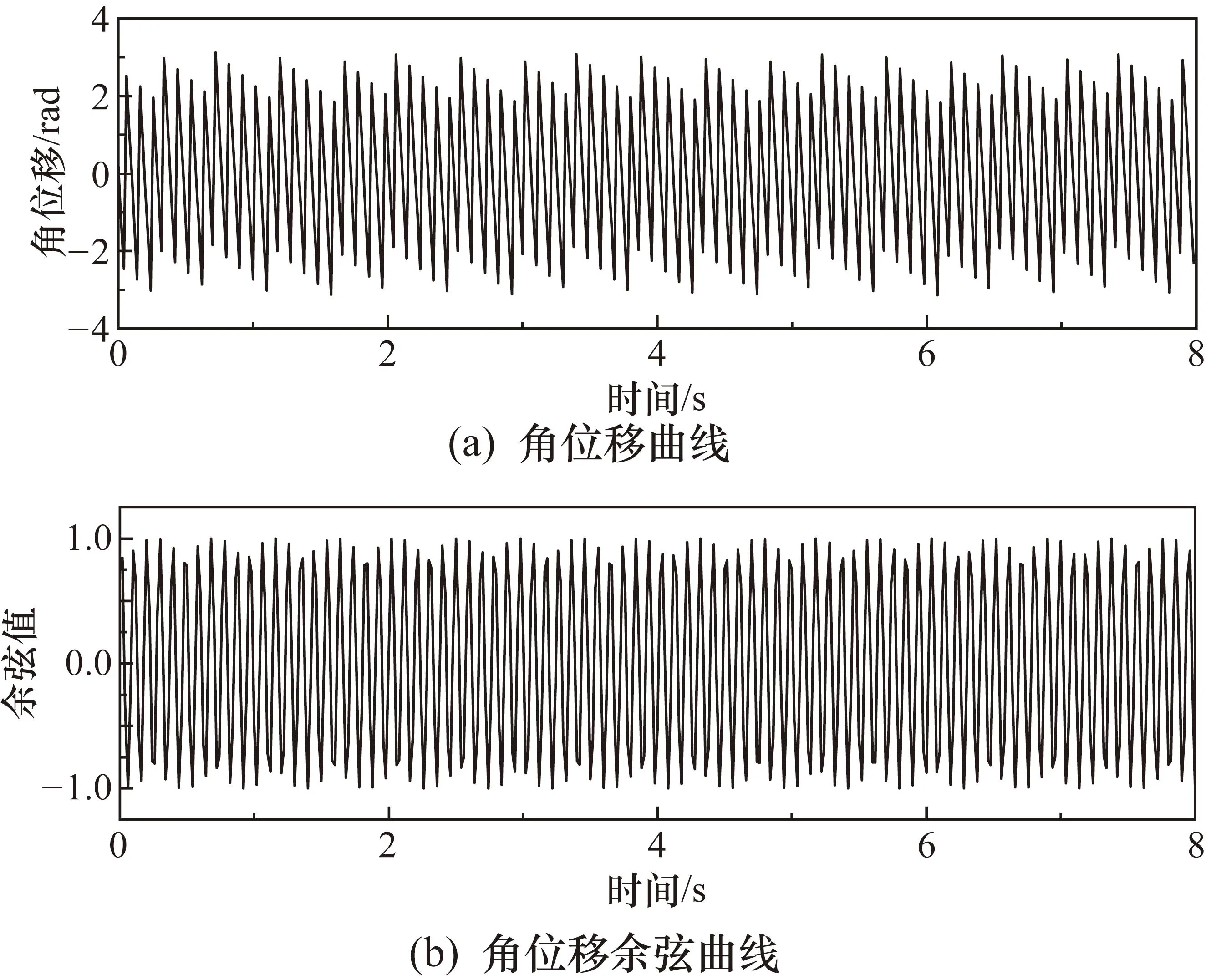
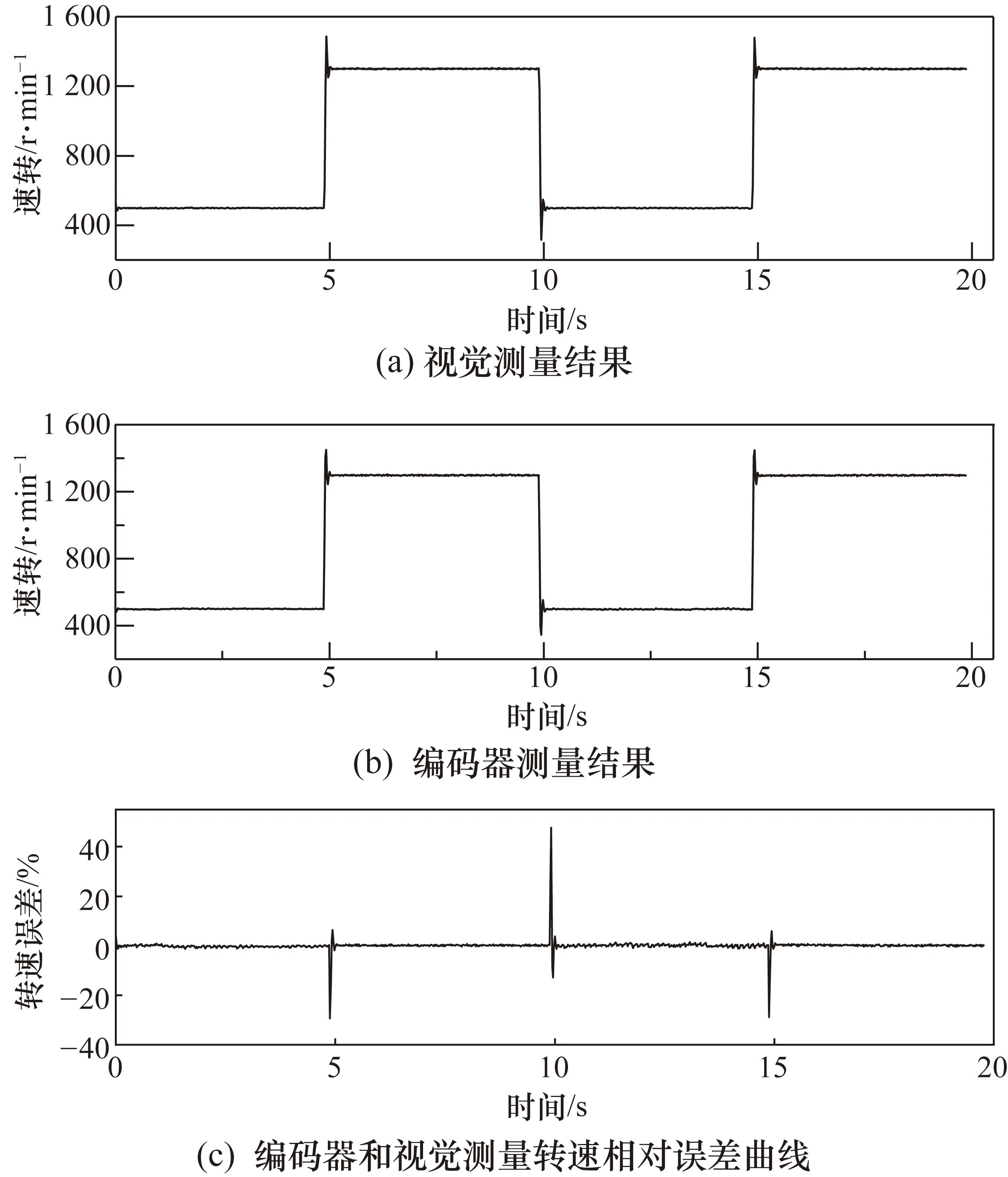
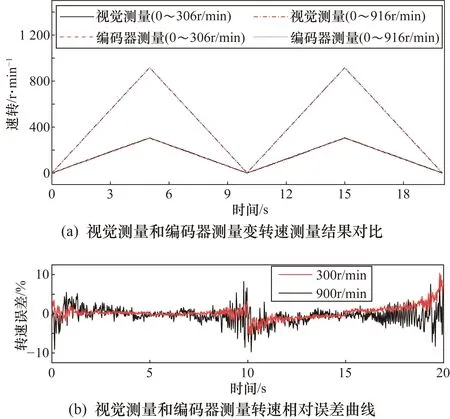
標靶圖案采集的過程中,相機不恰當的曝光時間會使采集的標靶圖案出現拖影,導致邊緣特征丟失,無法識別特征圓信息。運動速度和曝光時間是成像過程是否產生拖影的2個因素,當被測對象的運動速度一定時,要求曝光時間內物體運動的距離對應到工業相機傳感器不應超過1 px,所以為使拍攝對象不產生拖影,物體的運動速度v、曝光時間t、像素尺寸e應滿足:v×t 為了驗證所提出的基于轉軸端面特征圖案的轉軸動態參數同步測量方法的可行性,搭建了一套轉子軸承實驗臺分別用于轉軸的三維振動位移和轉速測量,實驗裝置如圖12所示。該測量系統的成像設備采用大華高速相機(A3138MU000),最大成像分辨率為1 280 px×1 024 px。為使相機盡可能與轉軸端面平行,首先將相機與兩端U形的壓板固定,調節相機底部邊線與壓板邊線垂直。然后將壓板和相機構成的組合件固定于帶定位螺栓孔的Z軸位移臺上,再將位移臺和轉子實驗臺(DHENT-2)分別安裝定位于連勝光學實驗平臺的平行定位孔上。通過上述步驟可最大程度減少相機與轉軸端面的偏移。最后調整相機位置和鏡頭焦距,使標靶圖案清晰地成像于相機視野之中。實驗中,轉軸采用伺服電機(Syntron TS0040A22)驅動并采用柔性聯軸器進行連接。待測轉軸直徑為10 mm,軸端安裝有配重轉盤,直徑為75 mm,配重轉盤上粘貼有標靶圖案。同時在配重轉盤的三維方向安裝電渦流位移傳感器(東華測試5E101-2)對轉軸三維振動位移進行測量以與視覺測量方法進行對比,該電渦流傳感器靈敏度為10 V/mm,在轉速測量實驗中,通過信號發生器(Agilent 33220A)的輸出電壓對轉軸轉速進行控制,通過伺服電機的轉速編碼器(分辨率為每轉2 500個脈沖)測量轉速并與視覺測量結果進行對比。相機的采樣幀率50 f/s,采集圖案的分辨率為960 px×960 px,待測轉軸轉速為627 r/min,為不產生拖影條件,選擇相機的曝光時間為0.4 ms,同時 3個電渦流位移傳感器分別布置于配重盤的三維方向。 1-電機;2-電機控制器;3-轉軸;4-信號發生器;5-外加光源;6-相機;7-電腦;8-標靶圖案;9-Z方向電渦流傳感器;10-X和Y方向電渦流傳感器。圖12 轉軸轉速和三維振動位移測量實驗裝置 測量環境設置完成后,分別對轉軸的三維振動位移和轉速進行測量。圖13(a)~圖13(c)分別為視覺測量方法和電渦流位移傳感器在X、Y和Z方向的測量結果對比。由圖13可知,在X和Y方向兩種測量方法得到的三維位移信號相較于Z方向吻合度較高,在X和Y方向上兩位移信號的相關系數分別為0.986 9和0.987 1,而Z方向位移信號的相關度為0.885 6。這是由于Z方向的位移測量精度受成像分辨率和信噪比影響較大,導致位移測量精度小于另外2個方向,符合上文對該測量系統的位移測量精度模擬分析結果,且通過與電渦流位移傳感器測量進行對比,驗證了所提出的三維方向位移計算原理和圖像處理算法的正確性。因此該系統可實現轉軸微米量級三維振動位移測量。 圖13 轉軸三維振動位移和轉速測量結果對比 為驗證所提出的測量方法可實現對轉軸三維振動位移和轉速的同步測量,對上述振動測量實驗中獲取的標靶圖案序列進行轉速提取,得到轉軸轉速曲線如圖13(d)所示,以編碼器輸出轉速作為參考轉速,其與視覺方法測得的轉速平均絕對誤差為1.012 r/min。并且通過視覺測量和編碼器測量測得的平均瞬時轉速分別為627.063 4 r/min和627.249 r/min,驗證了所提出的方法可實現轉軸轉速和位移參數的同步提取。 另外,所提出的測量方法得到的轉軸的角位移曲線為恒定周期的鋸齒波,對此角位移信號進行傅里葉變換可以得到轉軸的旋轉頻率,通過此方法就可以將求解轉軸轉速估計問題轉換為角位移信號頻率的求解問題。為驗證此種方法求瞬時轉速的可行性,對上述振動和轉速實驗中獲取的標靶圖案序列進行轉軸的旋轉頻率提取。圖14(a)為8 s內轉軸的角位移,對其求取余弦值,將其轉換為單一頻率余弦曲線信號,結果如圖14(b)所示,再利用能量中心頻譜矯正算法[19]對余弦曲線的頻率值進行精確校正,即可得到更加準確的頻率值,求得轉軸在627 r/min恒轉速條件下的旋轉頻率分別為10.459 1 Hz,由此頻率計算得到的轉軸瞬時轉速為627.546 3 r/min。 圖14 轉軸在627 r/min恒轉速工況的轉速測量結果 為了驗證所提出的方法能夠實現高低速轉子的轉速跟蹤,通過信號發生器產生一方波轉速信號,轉速信號從500 r/min 階躍至1 300 r/min,周期為10 s,相機的采集幀率設置為50 f/s(滿足采樣定理),圖像分辨率為952 px×912 px。 測量結果如圖15(a)和圖15(b)所示,在t=5 s、t=10 s和t=15 s處都產生了階躍信號,表明所提出的方法對階躍轉速信號有較好的響應能力。為了驗證系統在高、低速下的轉速測量性能,以編碼器測量的轉速為參考轉速,求取視覺測量和編碼器測量結果相對誤差,結果如圖15(c)所示,可知轉速切換處產生的誤差較大,在t=9.94 s產生的最大誤差為47.73%,而在轉速平穩階段內平均誤差為0.28%,且本文視覺測量方法和編碼器同時測量的轉速曲線基本一致,因此基于轉軸端面標靶圖案可高效、精確和穩定地對轉速信號進行測量。 圖15 高低轉速切換測量結果 同時所提出的轉速測量方法也可用于轉軸變轉速工況測量,采用一種對稱性為50%的三角波轉速變化曲線對系統性能進行驗證,速度變化頻率為0.5 Hz;變轉速實驗的轉軸轉速變化范圍分別為0~306 r/min和0~916 r/min。 實驗結果如圖16(a)所示,為更加直觀地顯示視覺測量和編碼器測量的誤差,將編碼器測得轉速作為參考轉速,分別求取兩種不同三角波變速工況下,視覺測量和編碼器測量的變轉速相對誤差,結果如圖16(b)所示。可知在升降速臨界處產生較大的誤差,但隨著轉速的穩定其測量誤差逐漸減小,這是由于轉軸在轉速切換時,慣性使速度響應與輸入的變速電壓信號不同步,因此產生了一定誤差。但本文視覺測量方法和編碼器同時測量的變轉速曲線基本吻合,并且通過該測量系統,由轉速曲線的正負斜率變化可間接獲得轉軸的旋轉方向。 圖16 變轉速測量結果 本文提出的基于轉軸端面標靶圖案的三維振動位移和轉速同步測量系統,只需將設計的標靶圖案粘貼于轉軸的端面,通過高速相機、計算機等構成的成像系統對轉軸端面的特征圖案進行連續采集,運用所提出三維振動位移和轉速測量算法原理,并結合光學成像關系,即可實現轉軸的三維振動位移和轉速的同步測量。相較于傳統的接觸和非接觸的測量裝置,以標靶圖案作為表征轉軸動態參數的傳感器,不會因引入附加質量而影響振動特性;同時不需要改變待測物體的結構特征即可獲得轉軸的三維振動位移和轉速信息。實際應用中,還可將其應用于旋轉機械中具有平整端面的零部件振動位移和轉速的測量,如齒輪端面、大型轉子軸承端面等。最后,通過該系統所獲得的轉軸的動態參數,可對轉軸健康狀態進行測量與評估,實現結構狀態監測或故障診斷等。 本文提出一種基于轉軸的三維振動位移和轉速參數同步測量的新方法,采用高速相機作為探測器,端面標靶圖案作為傳感器,結合光學成像原理即可實現轉軸真實振動位移和轉速的測量。 針對所提出的測量方法分析了影響測量精度的因素。模擬分析了系統的位移測量分辨率和角位移分辨率,實驗表明X和Y方向上的位移分辨率優于Z方向,角位移分辨率優于0.1°。同時模擬分析了相機鏡頭偏轉角度以及對圖片成像質量有影響的信噪比和圖像分辨率等因素的影響。結果表明,測量誤差隨著相機鏡頭偏轉角度的增大而增大,X、Y和Z方向的測量精度不同,且測量精度差異隨著圖像信噪比和分辨率的提高而減小,測量精度隨圖像信噪比和圖像分辨率的提高而提高。 通過搭建轉子軸承實驗臺對轉軸的三維振動位移和轉速參數進行同步測量,并將轉軸的三維振動位移和電渦流位移傳感器,以及轉軸在恒速和變速工況下的測量結果與編碼器轉速測量方法進行對比分析。實驗表明,該位移測量系統可實現微米量級的位移測量,對于變轉速工況,該方法測量性能和響應能力較好,可實現轉軸的轉速和振動位移的同步測量。3 實驗分析
4 結束語
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年1期)2021-01-21 03:22:38
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21