水平軸風(fēng)力機偏航與俯仰尾流特性
2024-01-09 13:19:28田堯,高超,劉亞
空氣動力學(xué)學(xué)報 2023年11期
田 堯,高 超,劉 亞
(西北工業(yè)大學(xué) 航空學(xué)院,西安 710072)
0 引言
當(dāng)風(fēng)吹過風(fēng)力機時帶動葉片旋轉(zhuǎn),此時葉片對流體的作用導(dǎo)致風(fēng)力機下游風(fēng)速減小、湍流度增大、風(fēng)剪切加劇等流動特征產(chǎn)生,而流體在下游傳播一段時間后,在外圍流體的作用下,逐漸恢復(fù)風(fēng)速,這種現(xiàn)象被稱為風(fēng)力機的尾流效應(yīng)[1]。尾流效應(yīng)產(chǎn)生的風(fēng)速虧損會使得下游的風(fēng)力機輸出功率降低,并且強湍流和風(fēng)剪切作用會影響下游風(fēng)力機的疲勞載荷、結(jié)構(gòu)性能。瑞典航空研究所在風(fēng)電場的測量結(jié)果表明,在風(fēng)速為12 m/s 的情況下,兩臺風(fēng)力機串列相距5 倍葉輪直徑時,處于尾流區(qū)內(nèi)的風(fēng)力機功率輸出僅為無干擾時的60%左右,而當(dāng)相距9.5 倍葉輪直徑時,則約為80%[2]。由此可以看出,尾流效應(yīng)對處于下游的風(fēng)力機的影響很大,尾流效應(yīng)的模擬精度直接決定著風(fēng)電場出力的評估精度,而風(fēng)電場所能提供的總出力是風(fēng)電場運營指標(biāo)的一個重要參數(shù)。
針對風(fēng)力機尾流的數(shù)值研究主要有三類:1)計算流體力學(xué)(Computational Fluid Dynamics,CFD);2)尾流數(shù)學(xué)模型;3)渦方法。CFD可以單獨求解風(fēng)力機上的氣動力以及風(fēng)力機的尾流場,但此種仿真方式所需的計算資源龐大。通常CFD 與葉素動量理論(blade element momentum,BEM)或致動系列算法結(jié)合,后者獲得風(fēng)輪后的誘導(dǎo)速度等信息,其結(jié)果以體積力源項的形式加入到Navier-Stokes(N-S)方程中,通過CFD 對風(fēng)力機的尾流場進行求解。Naderi 等[3]采用基于BEM 和CFD的混合方法,利用代表風(fēng)力機的致動盤模型對尾流的實際形狀進行了研究,并研究了不同的湍流模型對尾流形狀的影響。通過與現(xiàn)有分析模型的比較表明,由于考慮了湍流的影響,該方法顯著降低了用致動盤進行尾流仿真的誤差。Gajardo 等[4]針對海上多機組風(fēng)電平臺提出了一種耦合分離渦模擬和BEM 的方法,模擬渦輪陣列來研究尾跡的流體動力學(xué)特征及其相互作用,并與實驗進行了比較。張建等[5]在氣動方面采用致動線與大渦模擬、在結(jié)構(gòu)方面采用柔性多體動力學(xué)模型,建立了一種新型雙向流固耦合模型,考慮了結(jié)構(gòu)和氣動彈性對風(fēng)力機性能的影響,可用于動態(tài)結(jié)構(gòu)載荷預(yù)測及流固耦合分析。尾流數(shù)學(xué)模型是基于一定的實驗基礎(chǔ)和仿真經(jīng)驗,通過數(shù)學(xué)模型的形式來描述尾流發(fā)展的情況。Brusca 等[6]對Jensen、Larsen 以及Frandsen 尾流模型進行了研究,并通過風(fēng)洞實驗進行了實驗驗證。在這些模型的基礎(chǔ)上,還有人開發(fā)出新的解析模型。Tian 等[7]提出并驗證了可以估計任意流向位置尾流寬度和最大尾流湍流水平的一維解析模型;在此基礎(chǔ)上,提出了一種高效的三維余弦形狀模型,可以有效地估算尾流湍流強度。此外,考慮風(fēng)切變和地面效應(yīng),該模型能夠描述三維尾流場的各向異性特性。Sun 等[8]提出了一種新型的三維解析型風(fēng)力機尾流模型,與現(xiàn)有的解析尾流模型相比,Sun 提出的尾流模型考慮了風(fēng)向在高度方向上的變化,這種變化更加精確,更接近實際情況。Lopez 等[9]等基于不可壓RANS 方程,提出了一種針對水平軸風(fēng)力機偏航狀態(tài)的尾流模型,該模型能在很短的時間內(nèi)獲得與CFD 相近的仿真結(jié)果。渦方法模型從構(gòu)造風(fēng)力機葉片表面渦量出發(fā),利用不同程度的渦量分布來模擬葉片與三維流場之間的相互作用。Su 等[10]為了探究風(fēng)力機偏轉(zhuǎn)產(chǎn)生的尾流傾斜對下游風(fēng)力機的尾流屏蔽效應(yīng)是否有積極作用,提出了渦格-等環(huán)量輪廓法。Liu 等[11]提出了一種基于BEM 與渦絲法混合的數(shù)值尾跡模型,用于預(yù)測水平軸風(fēng)力機尾跡的速度虧損。通過求解風(fēng)力機下游渦系的演化過程,間接計算了下游速度分布,計算成本非常低。許波峰等[12]建立了一種全自由渦尾跡模型,當(dāng)線渦從葉片后緣脫落時,其隨當(dāng)?shù)亓鲃铀俣茸杂梢苿樱辉跇?gòu)建模型時,引入“虛擬周期”的概念,并發(fā)展一種自適應(yīng)松弛因子法,從而改善了自由尾跡迭代的穩(wěn)定性,提高了迭代收斂速度。曹九發(fā)等[13-14]基于非定常自由渦尾跡法和模態(tài)法研究了葉片非線性變形對葉片氣動特性和尾跡形狀產(chǎn)生的影響。周文平等[15]采用Weissinger-L 升力面模型和畸變的自由渦尾跡模型,通過五點中心差分松弛迭代法建立了適用于風(fēng)力機氣動性能計算的仿真模型。通過將自由渦尾跡方法與其他修正模型相結(jié)合,可以進一步接近真實物理情況,如三維旋轉(zhuǎn)效應(yīng)[16]、風(fēng)切變模型[17-18]等。
為減少風(fēng)力機尾流干擾效應(yīng)對下游風(fēng)力機入流的影響,最有效的解決策略是增大機組間距,但受風(fēng)場尺寸和地形的影響該策略很難實現(xiàn),因此對上游風(fēng)力機采用偏航和俯仰控制以使得尾流的作用區(qū)域發(fā)生偏轉(zhuǎn),有效地降低其產(chǎn)生的速度虧損。此外,風(fēng)力機常年運行在風(fēng)速與風(fēng)向隨機變化的復(fù)雜大氣環(huán)境中,其中風(fēng)向的變化可能使得風(fēng)力機處于偏航或俯仰的工作狀態(tài)。宗豪華等[19]從無偏航風(fēng)力機尾流模型、偏航風(fēng)力機尾流模型、多風(fēng)力機尾流疊加方法和風(fēng)電場產(chǎn)能優(yōu)化四個角度,闡述了主動尾流控制技術(shù);發(fā)現(xiàn)在應(yīng)用主動尾流控制技術(shù)后,全尾流干擾風(fēng)向上的風(fēng)電場產(chǎn)能可提高約5%~15%,各個風(fēng)向平均后的年均收益約1%~3%。楊慶山等[20]考慮了偏航控制失效后,風(fēng)力機在不同停機位置的結(jié)構(gòu)動力響應(yīng),同時分析了風(fēng)力機葉片、塔筒及下部結(jié)構(gòu)響應(yīng)隨偏航角的變化規(guī)律及停機位置對響應(yīng)結(jié)果的影響。
針對風(fēng)力機尾流進行仿真時,使用CFD 可以獲得非常精確的結(jié)果。然而,在現(xiàn)有計算模型下,CFD需要大量的計算資源和時間,因此難以在工程中廣泛應(yīng)用。相比之下,尾流數(shù)學(xué)模型計算效率高、耗費資源少,更適合工程應(yīng)用,但這些尾流模型通常都有很大的局限性,僅適用于較為簡單的工況,如無偏航、定常來流等。而升力線自由渦尾跡方法較尾流數(shù)學(xué)模型更加接近真實物理情況,同時較CFD 方法具有更高的計算效率,可以在一定程度上實現(xiàn)計算精度和計算效率之間的平衡。
本文基于升力線模型和自由渦尾跡模型建立了風(fēng)力機氣動仿真模型,以Nibe 風(fēng)力機為基準(zhǔn)算例驗證了模型對尾流仿真的可行性和準(zhǔn)確性。同時以NREL 5MW 風(fēng)力機為研究對象,探究了不同風(fēng)速下風(fēng)力機偏航/俯仰狀態(tài)下的尾流結(jié)構(gòu),對尾流結(jié)構(gòu)、失穩(wěn)特性進行了深入分析。為了研究風(fēng)力機在風(fēng)電場中工作時的真實尾流狀態(tài),考察了風(fēng)切變和塔架對風(fēng)力機偏航和俯仰工況時尾流的干擾作用。
1 數(shù)值模型
1.1 升力線自由渦尾跡模型
升力線自由渦尾跡模型(lifting line-free vortex wake,LLFVW)是由升力線模型和自由渦尾跡模型構(gòu)成,如圖1 所示。升力線模型是將風(fēng)力機的葉片以一根強度沿著展向變化的線渦來代替,從而表征來流與風(fēng)力機葉片的相互作用,該線渦稱為附著渦。根據(jù)Helmholtz 第二定律可知,在無黏環(huán)境下,渦不能在流場中終止,只能延伸到流場邊界或構(gòu)成環(huán),因此附著渦沿展向的變化量會形成尾流渦。同時,在非定常來流條件下,附著渦隨時間的變化量也會脫落至尾流中,形成脫落渦。
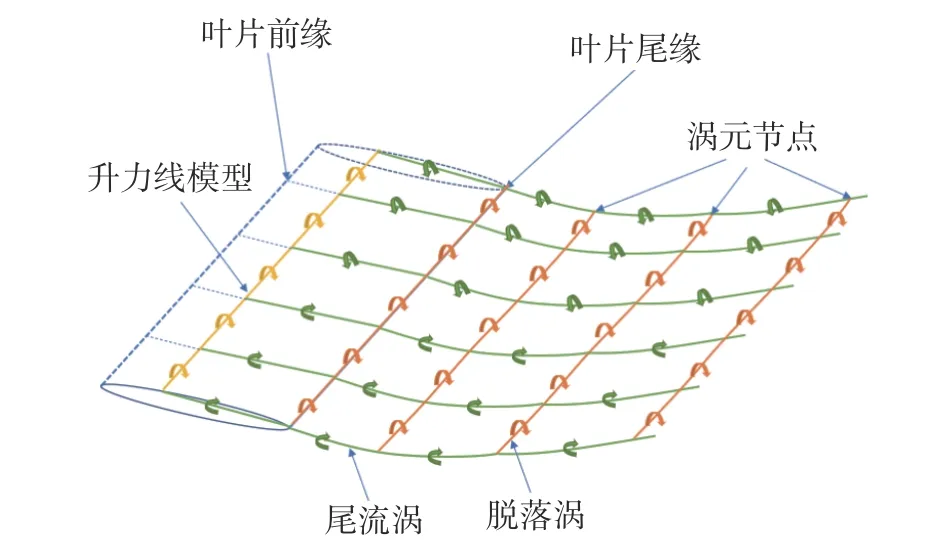
圖1 升力線自由渦尾跡模型Fig.1 Lift line model
基于不可壓縮的三維假設(shè),用來描述渦量場的N-S 方程為:
式中:ω為渦量,V為渦元速度,?為哈密頓算子,υ為動力學(xué)黏性系數(shù)。方程的右側(cè)依次是對流項、拉伸項和擴散項。
有研究表明[21],相比勢流流動,黏性作用局限于更小的長度尺度。因此采用基于拉格朗日描述法的自由渦尾跡模型對尾流場中的線渦運動進行描述。在無旋不可壓假設(shè)下,描述這些離散渦絲運動的控制方程可簡化為簡單的對流方程:
式中:r為渦元節(jié)點的位置矢量,r0為初始位置,V(r,t)為r處流體的速度矢量。方程(2)看似簡單,但由于局部流體速度V(r,t)具有較強的非線性特性,需要進一步處理才能保證方程求解的魯棒性。
如圖2 所示,根據(jù)風(fēng)力機尾流特性,方程(2)可以通過風(fēng)力機葉片的方位角和尾流的壽命角進行離散:

圖2 葉尖渦離散示意圖Fig.2 Schematic of tip vortex dispersion
式中:ψ為葉片方位角,ζ為尾流壽命角。葉片方位角和尾流壽命角對時間的導(dǎo)數(shù)都是葉輪轉(zhuǎn)速Ω,根據(jù)鏈?zhǔn)椒▌t,式(3)可以轉(zhuǎn)化為:
對于偏微分方程(4)采用有限差分法進行數(shù)值求解,方程(4)的左邊是一維尾跡方程。對于葉片方位角的離散采用由Bagai 和Leishiman[22]提出的五點中心差分方法(PCC)進行離散。如圖3 所示,該方法通過網(wǎng)格中點附近的值來計算 ψ 和 ζ在網(wǎng)格中點的導(dǎo)數(shù)。方程(4)左側(cè)的方位角導(dǎo)數(shù)差分形式可轉(zhuǎn)化為:
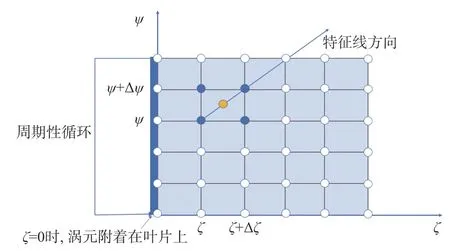
圖3 PCC 差分方法Fig.3 Schematic of PCC difference method
對于尾流壽命角的離散采用Bhagwat 和Leishman[23]提出的二階后向差分算法(PC2B)。如圖4 所示,該方法使用前三個時間步的信息來進行當(dāng)前時間步的有限差分近似計算。方程(4)左側(cè)的壽命角導(dǎo)數(shù)差分形式可轉(zhuǎn)化為:
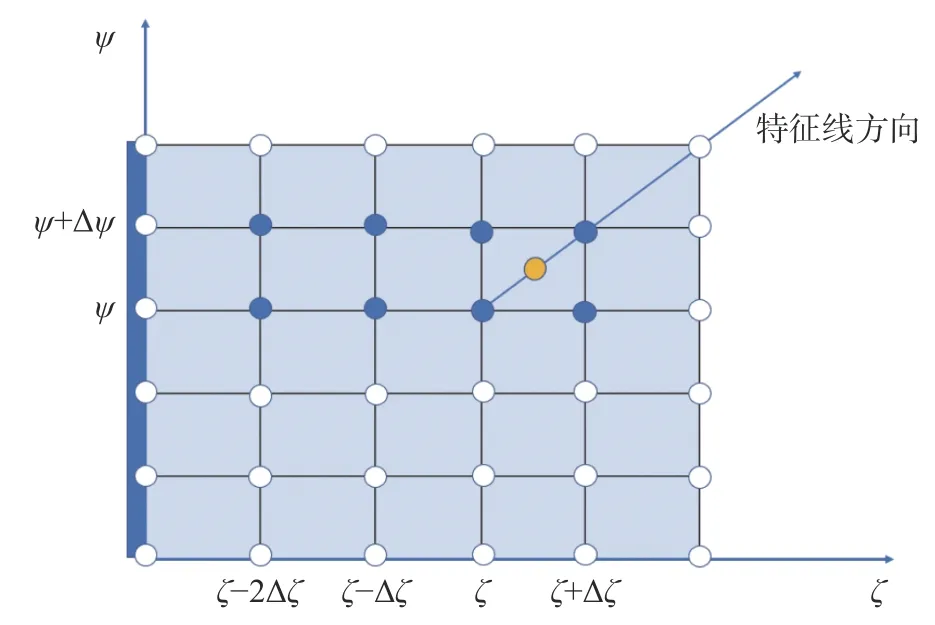
圖4 PC2B 差分方法Fig.4 Schematic of PC2B difference method
方程(4)右側(cè)的速度包括來流速度、尾流場中渦誘導(dǎo)速度以及旋轉(zhuǎn)速度:
誘導(dǎo)速度通過Biot-Savart 定理求解,其離散形式表示為:
式中:Γ為渦元強度,r1和r2表示當(dāng)前離散渦絲的兩個端點到目標(biāo)點P 的矢量。
當(dāng)目標(biāo)點P 在渦絲上或無限接近渦絲,誘導(dǎo)速度趨于無窮大,顯然不符合物理實際。為消除這一奇性,引入Vatistas 渦核模型作為誘導(dǎo)速度計算式系數(shù):
式中:h為目標(biāo)點到渦絲的垂直距離;n是一個經(jīng)驗參數(shù),取不同的值代表不同的經(jīng)驗?zāi)P停疚牡姆抡婢捎胣=2;rc為瞬時渦核半徑,其有經(jīng)驗公式:
式中:k為經(jīng)驗參數(shù),其值為1.254 6;t為時間。
1.2 三維效應(yīng)修正
采用升力線模型來代替葉片對于入流風(fēng)的作用需要利用葉片截面翼型的實驗升阻力參數(shù),雖然不需要再去考慮黏性的作用,但是需要對旋轉(zhuǎn)帶來的三維效應(yīng)作進一步處理。在葉片旋轉(zhuǎn)過程中,主要是離心力和科氏力會帶來三維效應(yīng),離心力會使得葉片表面產(chǎn)生徑向的流動,科氏力會使得葉片逆壓梯度減小,推遲表面流動分離。目前常用的三維旋轉(zhuǎn)修正模型多采用基于實驗的半經(jīng)驗?zāi)P停疚倪x取Du-Selig 修正模型[24]來修正升阻力系數(shù),其形式如下:
式中:CL,p=2π(α-α0),其中α是當(dāng)前迎角,α0是零升迎角;CD,0是迎角為0°時的二維阻力系數(shù)CD,2D。升阻力修正系數(shù)為:
其中:
式中:c是當(dāng)前翼型的弦長;r是當(dāng)前葉元的半徑,也即當(dāng)前葉元的徑向距離;R是葉片半徑;a、b、d、Λ均為經(jīng)驗參數(shù)。
1.3 葉尖損失修正
風(fēng)力機葉片在真實流場中工作時,由于吸力面和壓力面存在壓差,因此會有從壓力面到吸力面的繞流運動,此時葉尖的升力應(yīng)為0。但是升力線方法直接采用二位翼型的氣動特性曲線,在迎角不為0°的情況下,由升力線獲得的葉尖升力不為0,這與真實情況相矛盾,因此需要對葉尖的二維升阻力系數(shù)進行修正。
多數(shù)葉尖損失修正模型需要計算葉元的誘導(dǎo)系數(shù),但采用升力線自由渦尾跡方法時,誘導(dǎo)系數(shù)計算復(fù)雜,因此本文采用可以直接對二維翼型升阻力系數(shù)修正的Shen 模型[25],其格式如下:
式中:ΦR為當(dāng)前截面處相對風(fēng)速和葉輪平面的夾角;g是經(jīng)驗參數(shù),其值如下:
式中,c1、c2均為經(jīng)驗參數(shù),分別取值0.125、21;λ為葉尖速比。
1.4 風(fēng)切變和塔影模型
風(fēng)切變模型是指風(fēng)速大小和方向在空間上的變化,針對風(fēng)力機通常采用指數(shù)模型來描述風(fēng)速在豎直方向上的變化:
式中,V(z) 為高度z處的風(fēng)速,Vhub為輪轂高度的風(fēng)速,zhub為輪轂高度,γ為風(fēng)切變系數(shù),本文中取值0.2。
針對渦絲的離散中采用了葉片的方位角,為了方便計算,在計算葉片上的風(fēng)速時,針對式(24)中的z也采用方位角和葉片的徑向距離進行描述:
式中θ是葉片的方位角。
塔影模型是描述風(fēng)速受塔架干擾、塔架正前方風(fēng)速減小、兩側(cè)氣流加速的模型。本文采用Powles[26]塔影模型,其表達式如下:
2 模型驗證
本文以丹麥Nibe 風(fēng)力機[27]作為數(shù)值模型的驗證算例,其主要參數(shù)如表1 所示。
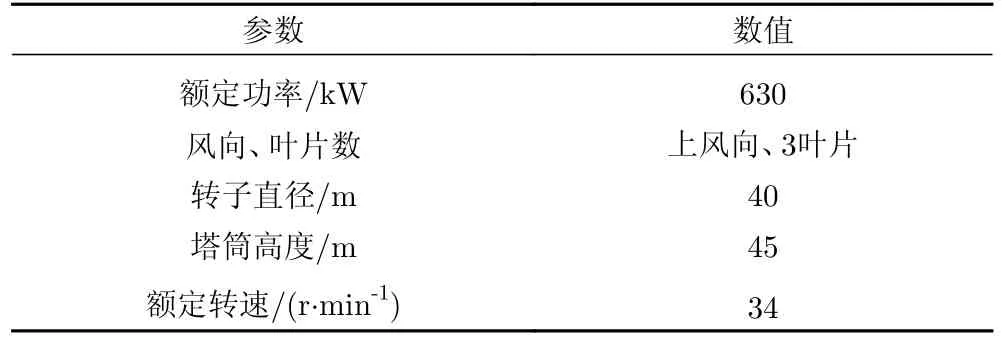
表1 Nibe 風(fēng)力機特性Table 1 Nibe turbine characteristics
圖5 為Nibe 風(fēng)力機在軸向上不同位置處的速度剖面圖,以實驗結(jié)果為基準(zhǔn),對比了LLFVW 模型和Jensen 模型以及修正的2D_Jensen 模型[28]的結(jié)果。從圖中可以看出風(fēng)力機尾流速度在輪轂中間位置存在速度最低點,并且隨著軸向位置的增加,風(fēng)力機尾流速度不斷恢復(fù)。在近尾流區(qū),LLFVW 模型獲得速度分布與實驗值趨勢相同,并且能夠獲得速度虧損最大值,而Jensen 模型低估了速度虧損,2D_Jensen 模型高估了速度虧損。在遠尾流區(qū),Jensen 模型能夠獲得速度虧損的最大值,但其速度分布與實際尾流結(jié)果相差較大,而2D_Jensen 模型仍然高估了遠尾流區(qū)的速度虧損,相比之下LLFVW 模型能得到與實驗結(jié)果接近的速度虧損分布情況。因此,采用LLFVW 模型不僅具有較高的計算效率,而且具有良好的計算精度。
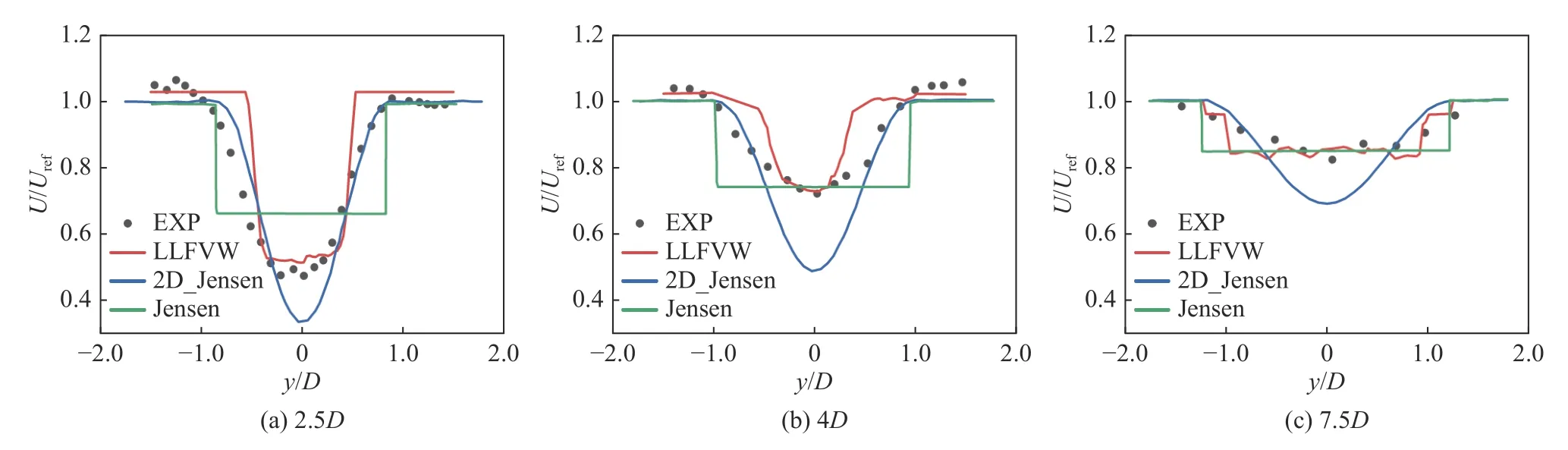
圖5 Nibe 風(fēng)力機下游不同位置處速度剖面對比圖Fig.5 Comparison of downstream velocity profiles bewtween different locations of the Nibe wind turbine wake
3 NREL 5MW 偏航和俯仰仿真
本文以NREL 5MW 風(fēng)力機[29]為研究對象,其詳細參數(shù)如表2。
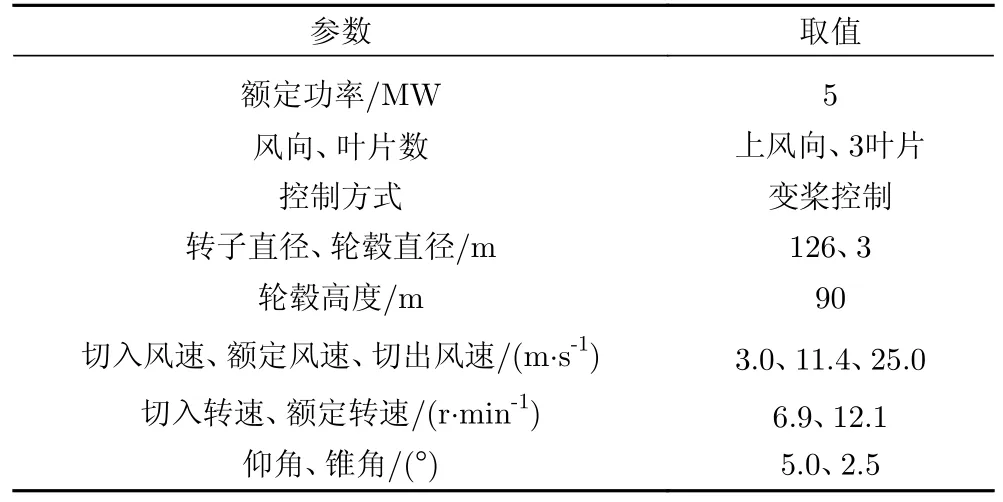
表2 NREL 5MW 風(fēng)力機特性Table 2 NREL 5MW turbine characteristics
3.1 氣動特性驗證
圖6 給出了不同風(fēng)速下計算獲得的風(fēng)輪氣動功率和推力結(jié)果,并以近年來不同CFD 方法[30-33]的仿真結(jié)果作為對比。NREL 開發(fā)的FAST 程序包含BEM 模塊,并且為了提高BEM 的計算精度加入了各種修正模型。雖然仍不能獲得風(fēng)機尾流場的流動特性,但在計算上游風(fēng)機的氣動特性時,可獲得精度可接受的結(jié)果。從圖中可以看出,采用LLFVW 模型獲得的氣動功率和推力與其他仿真模型的結(jié)果變化規(guī)律相同,各個風(fēng)速下都能獲得與CFD結(jié)果接近的值。推力結(jié)果顯示,當(dāng)風(fēng)速大于13 m/s 時,CFD 獲得的結(jié)果小于升力線自由渦尾跡方法。由于上述研究人員采用了不同的結(jié)構(gòu)仿真模塊、考慮了葉片變形的結(jié)果,因此在高速來流情況下,葉片變形改變了風(fēng)輪的掃掠面積,降低了轉(zhuǎn)子的整體推力;并且在風(fēng)速高于額定風(fēng)速時,需要采用變槳控制等方式實現(xiàn)功率的穩(wěn)定。各種仿真手段采用不同的控制策略也可能導(dǎo)致高速來流條件下氣動結(jié)果的差異。
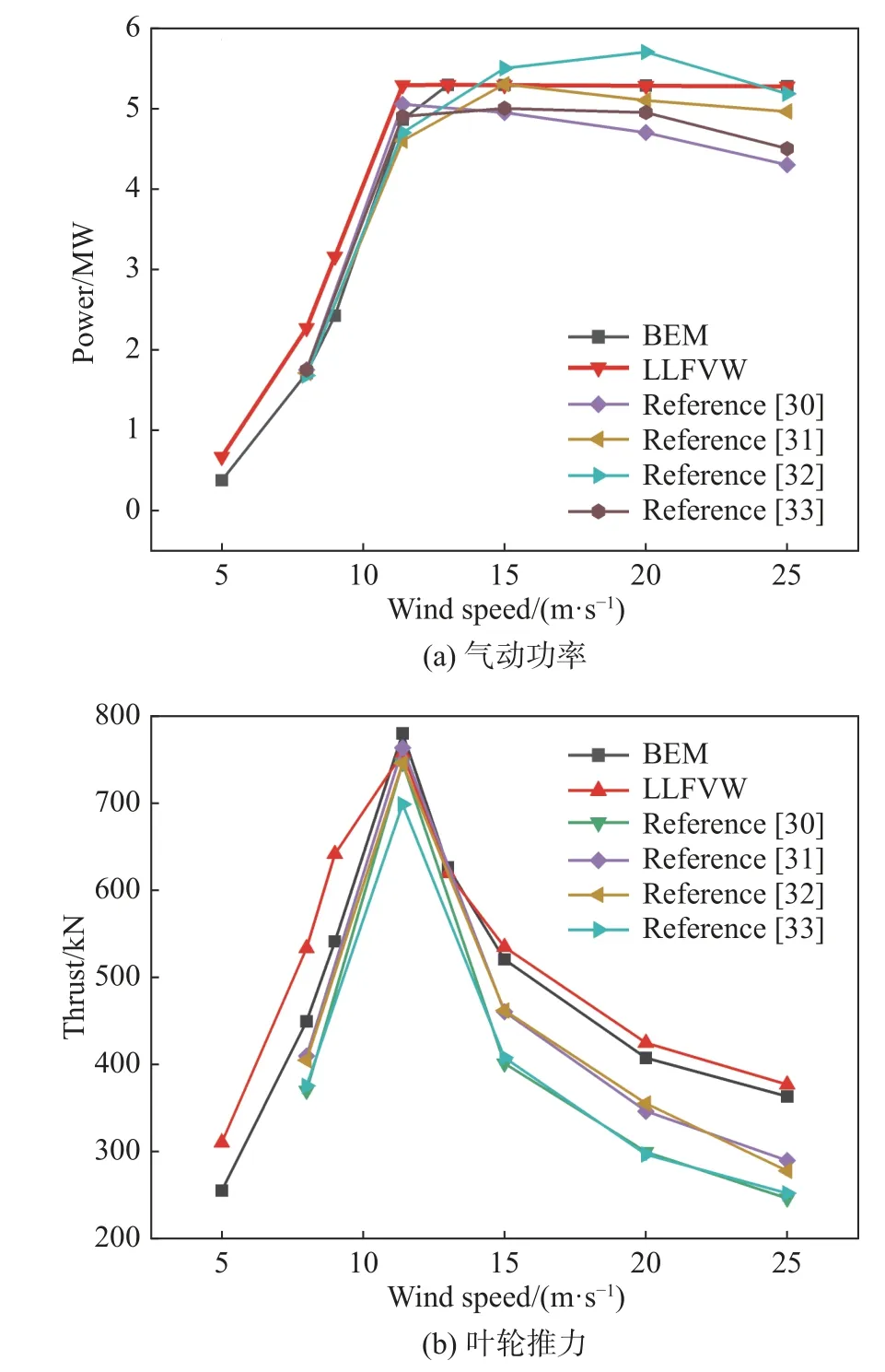
圖6 不同風(fēng)速下的氣動特性Fig.6 Aerodynamic characteristics at different wind speeds
3.2 不同偏航角尾流特性
在風(fēng)電場中,上游風(fēng)力機與來流相互作用會產(chǎn)生螺旋狀的渦尾跡,這種尾流結(jié)構(gòu)會導(dǎo)致下游風(fēng)速減小、湍流度增大、風(fēng)剪切加劇,從而降低下游風(fēng)力機的產(chǎn)出。對于大型風(fēng)電場而言,由尾流干擾所引起的產(chǎn)能損失最高可達30%~40%。為了減少尾流干擾所帶來的不利影響,常見的尾流控制方法有靜態(tài)偏航控制、周期性變槳距、風(fēng)輪仰角控制等[34]。其中,靜態(tài)偏航控制工程實現(xiàn)難度較低,尾流偏轉(zhuǎn)效率較高,同時可避免葉片動載荷的增大[35]。因此,本文針對NREL 5MW 風(fēng)力機研究了不同偏航角工況下的尾流特性。
圖7 給出了NREL 5MW 風(fēng)力機在偏航角βyaw=0°~30°的尾流結(jié)構(gòu)。從圖中可以看出附著渦脫離葉片后形成的尾流渦和脫落渦在近尾流區(qū)能保持穩(wěn)定的渦結(jié)構(gòu),隨著與外圍流體的相互作用,穩(wěn)定的渦結(jié)構(gòu)被破壞,尾流場中湍流度增大,尾流區(qū)內(nèi)的速度逐漸恢復(fù)。同時,隨著偏航角的增大,渦結(jié)構(gòu)的失穩(wěn)更早發(fā)生,且相同位置的遠尾流區(qū)湍流度更大。
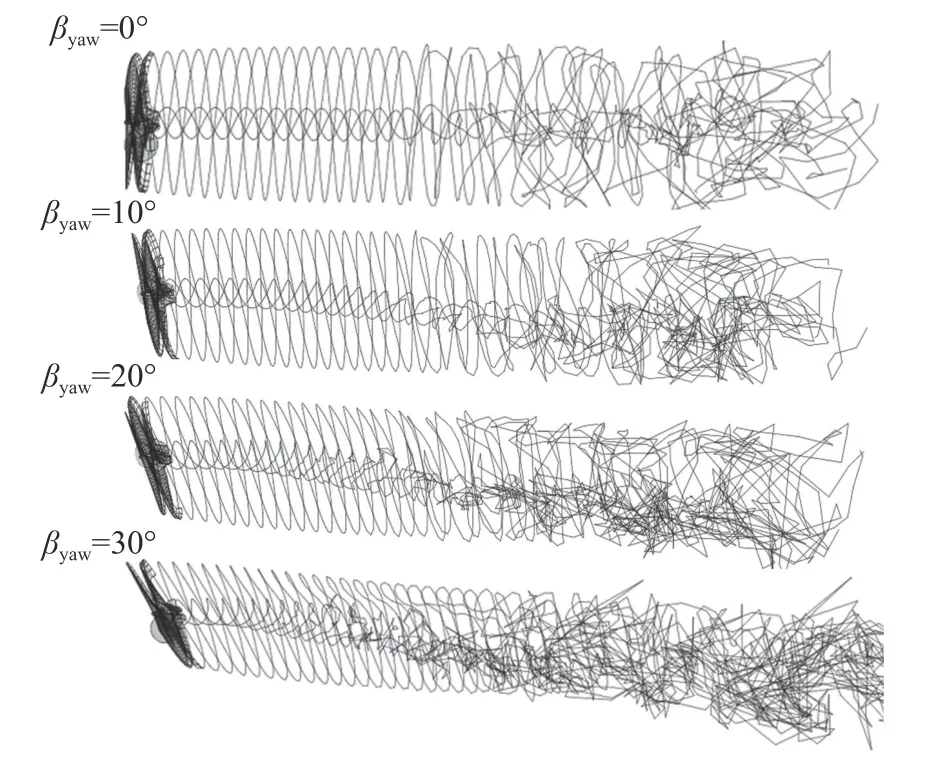
圖7 不同偏航角尾流渦結(jié)構(gòu)Fig.7 Wake vortex structure at different yaw angles
圖8 是輪轂高度處額定風(fēng)速11m/s、βyaw=0°~30°的尾流速度分布。相比軸流風(fēng)力機尾流,在偏航誘導(dǎo)產(chǎn)生的非零側(cè)向力和展向速度作用下,風(fēng)力機的尾流中心線隨著流動向下游傳播而發(fā)生偏移,且偏航角度越大偏移越明顯。由于尾流的擴張效應(yīng),偏航產(chǎn)生的展向速度沿流向會逐漸減小,偏航角30°時風(fēng)力機尾流在下游8D處后的中心線偏轉(zhuǎn)量基本保持0.5D不變。除了改變尾流方向外,偏航降低了尾流干擾對下游的影響,尾流作用區(qū)域隨著偏航角的增大而減小,同時在尾流作用區(qū)域內(nèi),偏航角越大速度虧損越小。
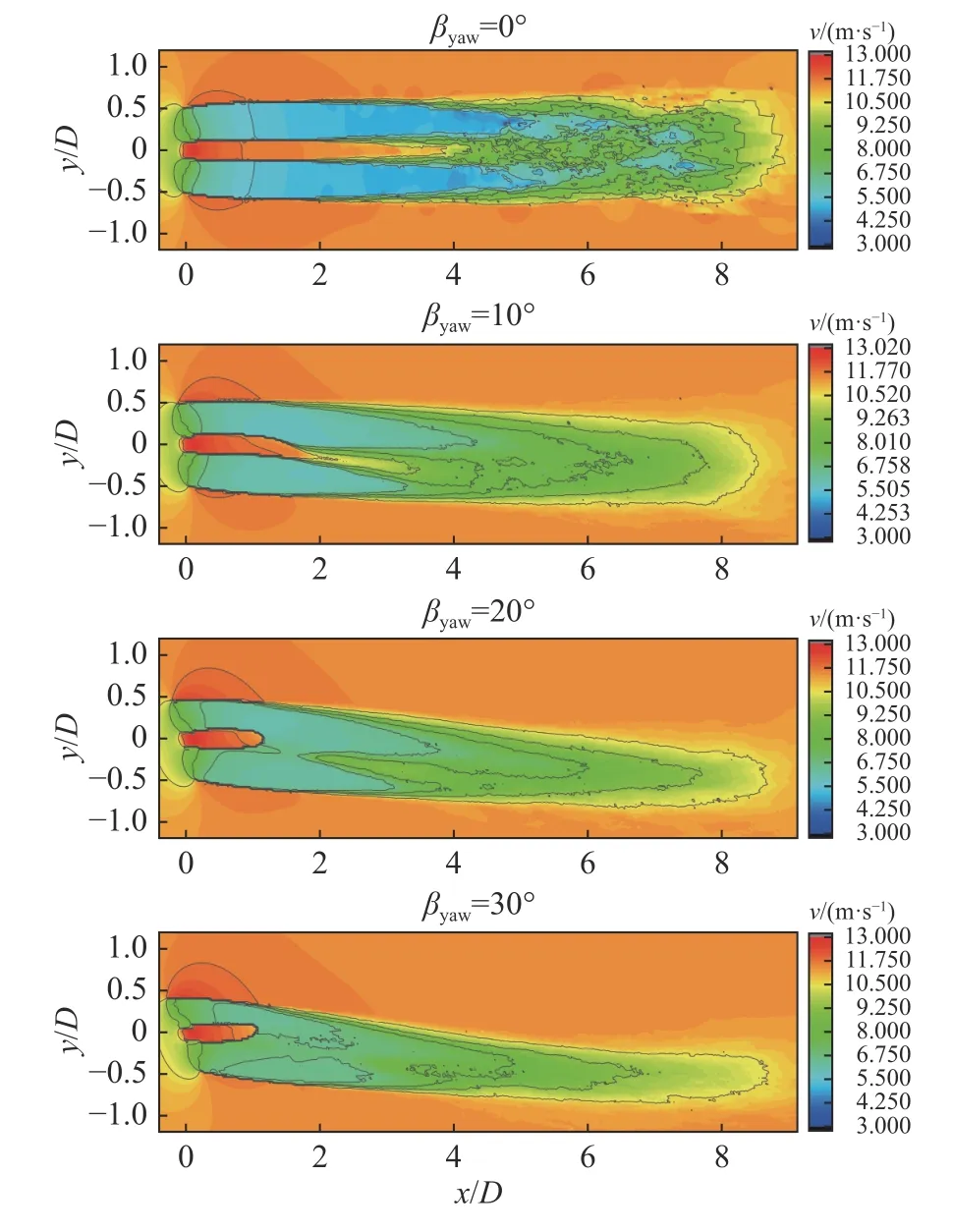
圖8 不同偏航角輪轂高度處速度云圖Fig.8 Velocity contours of hub height at different yaw angles
圖9 給出了偏航條件下的速度云圖。偏航風(fēng)力機的尾流速度剖面與軸流風(fēng)力機尾流明顯不同,表現(xiàn)為上下不對稱的“腎”形。結(jié)合尾流渦結(jié)構(gòu)的發(fā)展,分析認為導(dǎo)致該尾流結(jié)構(gòu)產(chǎn)生的原因是輪轂渦和葉尖渦的流向渦量相互誘導(dǎo)融合,形成一個對轉(zhuǎn)渦包,該渦包誘導(dǎo)產(chǎn)生橫向速度,橫向速度的運輸導(dǎo)致了非對稱“腎”形尾流速度剖面。
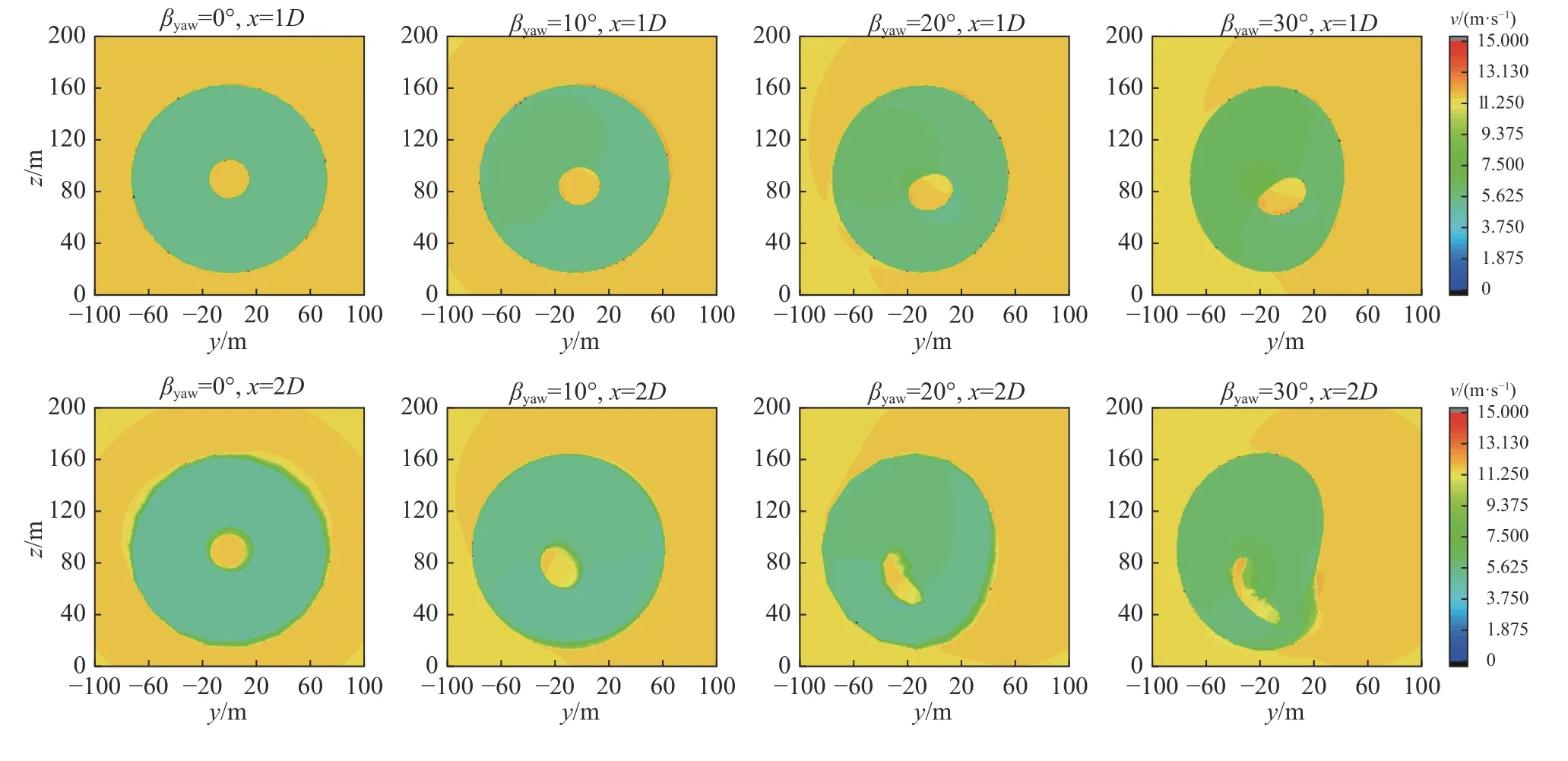
圖9 偏航條件下不同尾流位置處速度剖面Fig.9 Velocity profiles at different wake positions under yawed conditions
圖10 是風(fēng)輪下游不同位置輪轂高度處的速度型。在1D處,各個偏航角的尾流速度分布呈“高帽”形,偏航導(dǎo)致的尾流中心線偏轉(zhuǎn)現(xiàn)象并不明顯,但中心線左右速度虧損不對稱,偏轉(zhuǎn)側(cè)的作用區(qū)域更小。隨著流動向下游發(fā)展,偏航尾流的中心偏轉(zhuǎn)明顯,在外圍流體的作用下,速度虧損恢復(fù)較快。3D處渦結(jié)構(gòu)開始失穩(wěn),其誘導(dǎo)產(chǎn)生的速度使得尾流速度分布不再規(guī)律,各偏轉(zhuǎn)狀態(tài)的風(fēng)力機尾流不再保持對稱結(jié)構(gòu)。
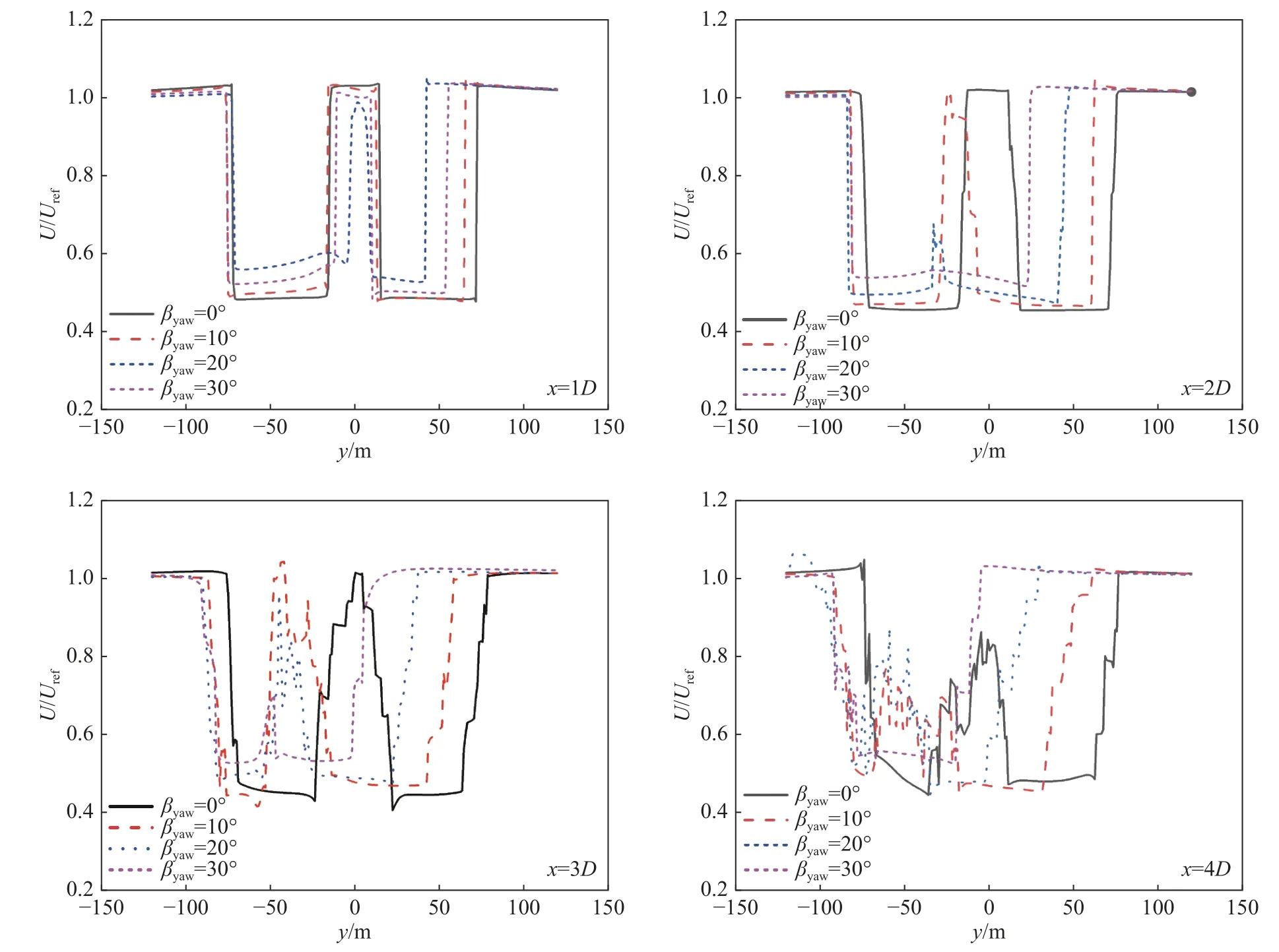
圖10 偏航條件下不同位置處輪轂高度速度型Fig.10 Hub height velocity at different positions under yaw conditions
3.3 不同俯仰角尾流特性
風(fēng)輪的俯仰可以改變風(fēng)力機尾流在豎直方向的分布,使得尾流發(fā)生豎直偏轉(zhuǎn),從而達到控制尾流干擾效應(yīng)的目的。圖11 給出了NREL 5MW 風(fēng)力機在俯仰角βtilt=0°~30°下的尾流結(jié)構(gòu),從圖中可以看出,與偏航情況類似,隨著俯仰角的增大,渦結(jié)構(gòu)的失穩(wěn)更早發(fā)生,且相同位置的遠尾流區(qū)湍流度更大。
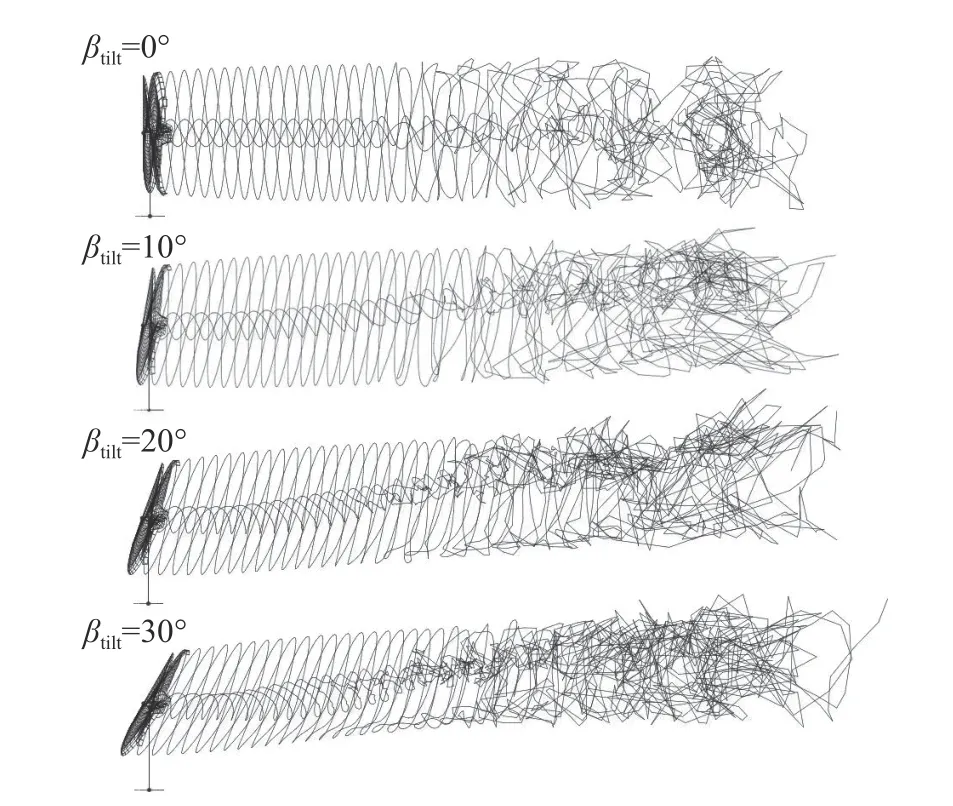
圖11 不同俯仰角尾流渦結(jié)構(gòu)Fig.11 Wake vortex structure at different tilt angles
圖12 是額定風(fēng)速11 m/s、俯仰角0°~30°、風(fēng)力機中心截面的尾流速度分布。俯仰會使得尾流中心線發(fā)生偏移,同時也存在一個偏移極限。在尾流作用區(qū)域內(nèi),尾流作用半徑減小,速度虧損減弱。
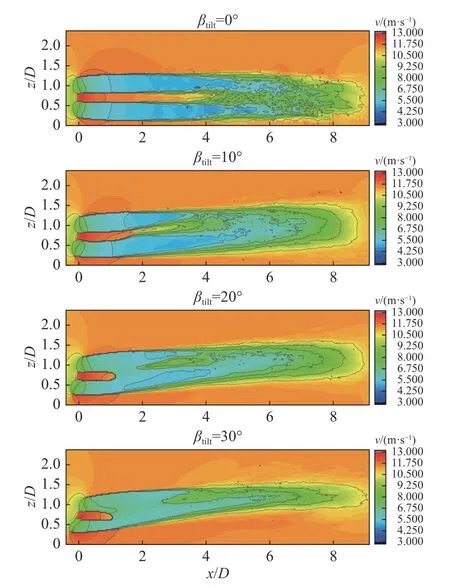
圖12 不同俯仰角風(fēng)輪中心截面速度云圖Fig.12 Velocity contours of turbine center section at different tilt angles
圖13 給出了風(fēng)輪俯仰情況下不同下游位置的速度云圖。從圖中可以看出,與偏航類似,俯仰也會導(dǎo)致尾流速度剖面呈水平不對稱“腎”形結(jié)構(gòu);并且俯仰角的風(fēng)輪會對來流產(chǎn)生抬升作用,使得尾流作用區(qū)域上升,作用區(qū)域減小。目前在部分陸上風(fēng)電場中,風(fēng)電機組布局在豎直方向存在高度差,采用風(fēng)輪俯仰控制可以使上游風(fēng)力機的尾流發(fā)生豎直方向的偏轉(zhuǎn),有效降低上游風(fēng)力機尾流對下游風(fēng)力機入流的干擾,實現(xiàn)尾流干擾的控制。
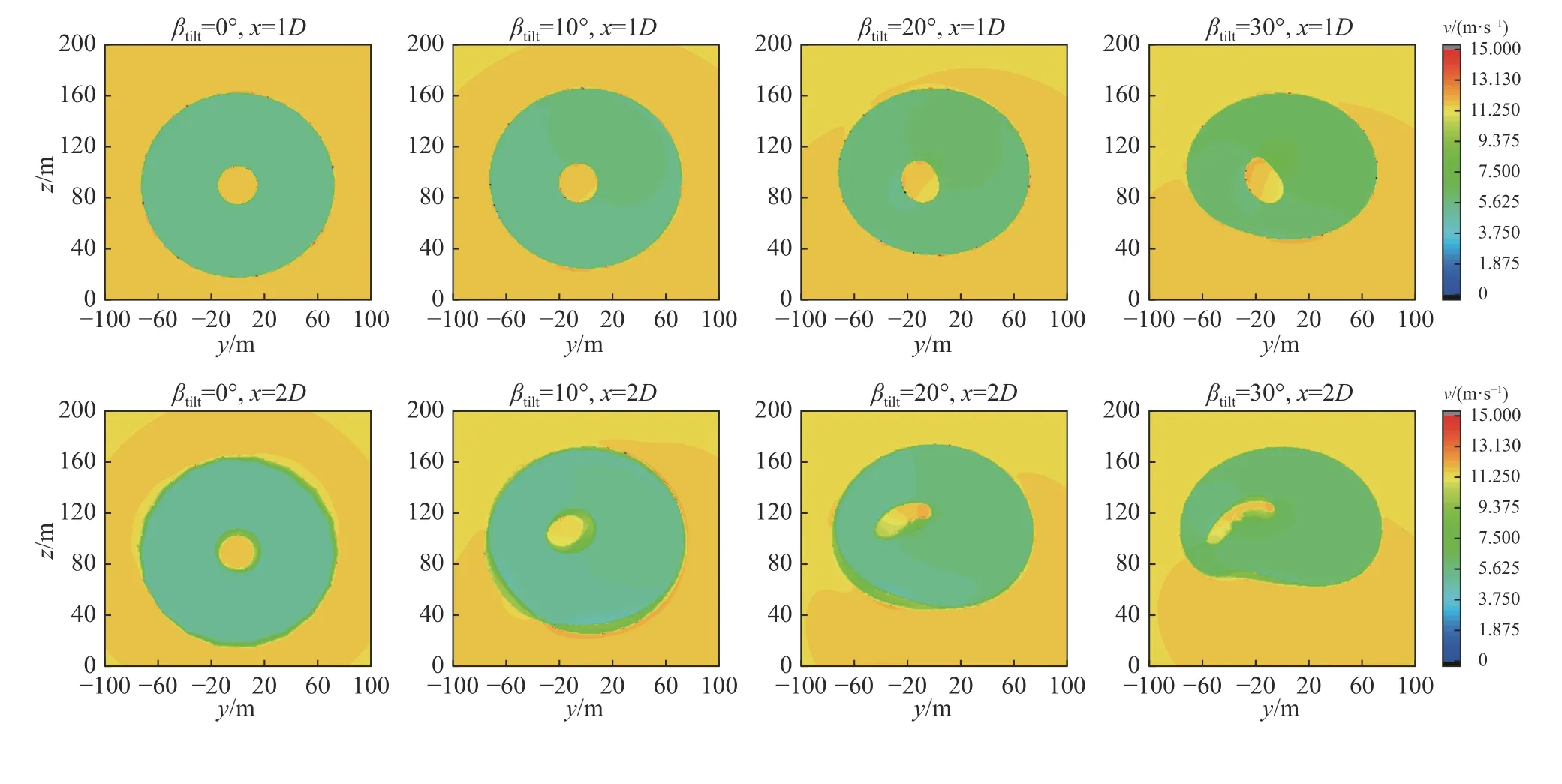
圖13 俯仰條件下不同尾流位置處速度剖面Fig.13 Velocity profiles at different wake positions under tilted conditions
圖14 是俯仰條件下不同位置處輪轂高度速度分布。與偏航不同的是,在下游1D位置處俯仰工況的尾流速度虧損基本保持對稱結(jié)構(gòu)。隨著流動向下游發(fā)展,俯仰工況的尾流作用區(qū)域上移,輪轂高度的尾流虧損小于軸流工況的結(jié)果。在4D位置處時,與軸流工況相比,俯仰角30°時速度虧損顯著恢復(fù)。
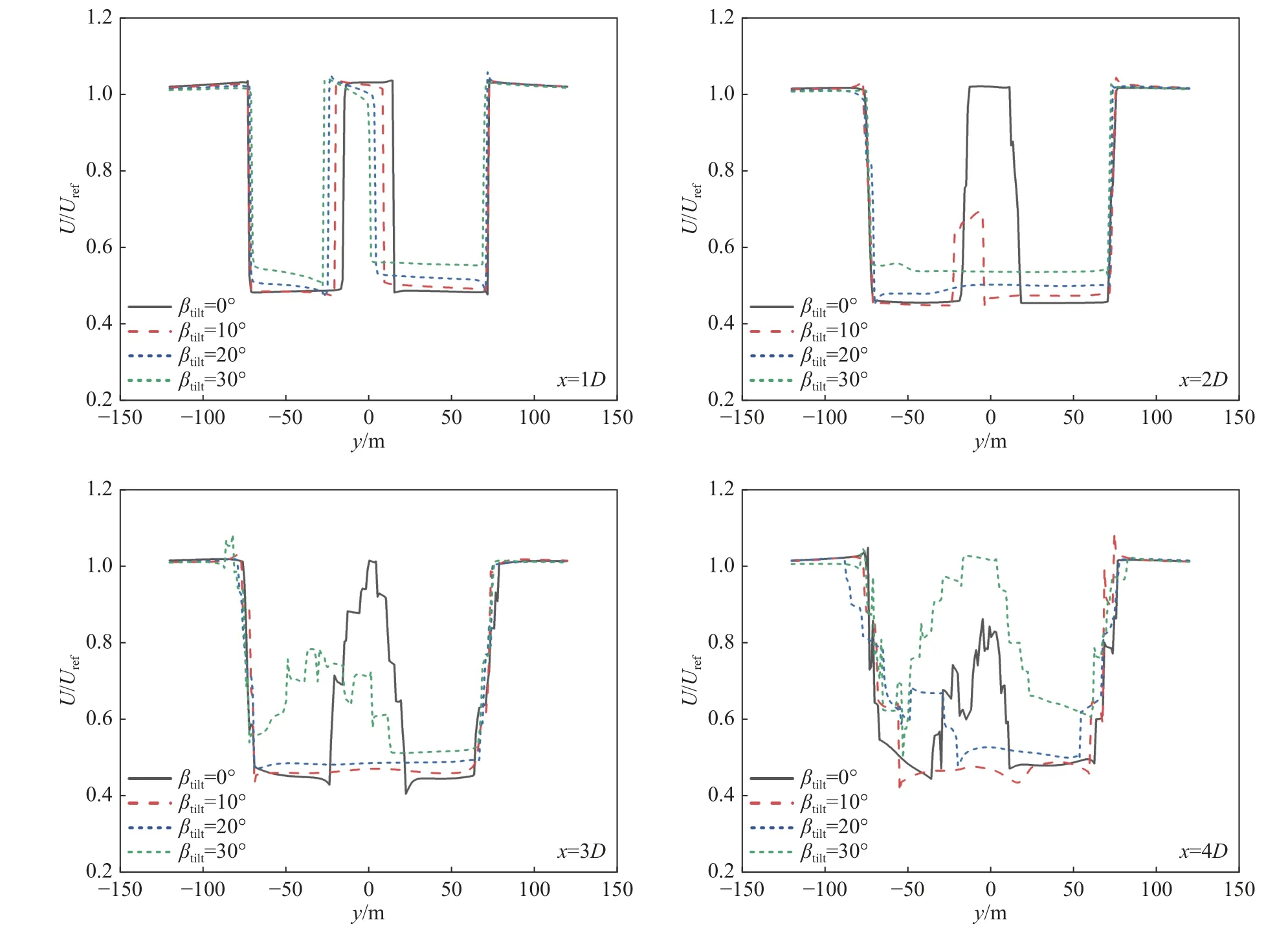
圖14 俯仰條件下不同尾流位置處輪轂高度速度型Fig.14 Hub height velocity at different wake positions under tilt condition
3.4 考慮風(fēng)切變/塔架的尾流特性
風(fēng)力機在實際運行過程中,風(fēng)切變和塔架是非常典型的干擾因素,兩者都會導(dǎo)致風(fēng)力機氣動功率發(fā)生波動和損失,同時也會改變風(fēng)力機的尾流結(jié)構(gòu),使其發(fā)生畸變,而這種畸變會反作用于風(fēng)輪平面,進一步影響風(fēng)力機葉片的氣動性能。因此探究風(fēng)切變和塔架干擾條件下風(fēng)力機偏航和俯仰的尾流意義重大。
圖15 是考慮風(fēng)切變和塔架后風(fēng)力機偏航角0°~30°的輪轂高度速度云圖。從圖中可以看出,在考慮風(fēng)切變和塔架后,軸流工況的尾流作用區(qū)域不再保持對稱結(jié)構(gòu),且作用區(qū)域顯著減少。同時在考慮兩種干擾條件下,偏航仍可以減小上游風(fēng)力機的尾流效應(yīng)對下游區(qū)域的影響,在尾流作用區(qū)域內(nèi)速度虧損更小。
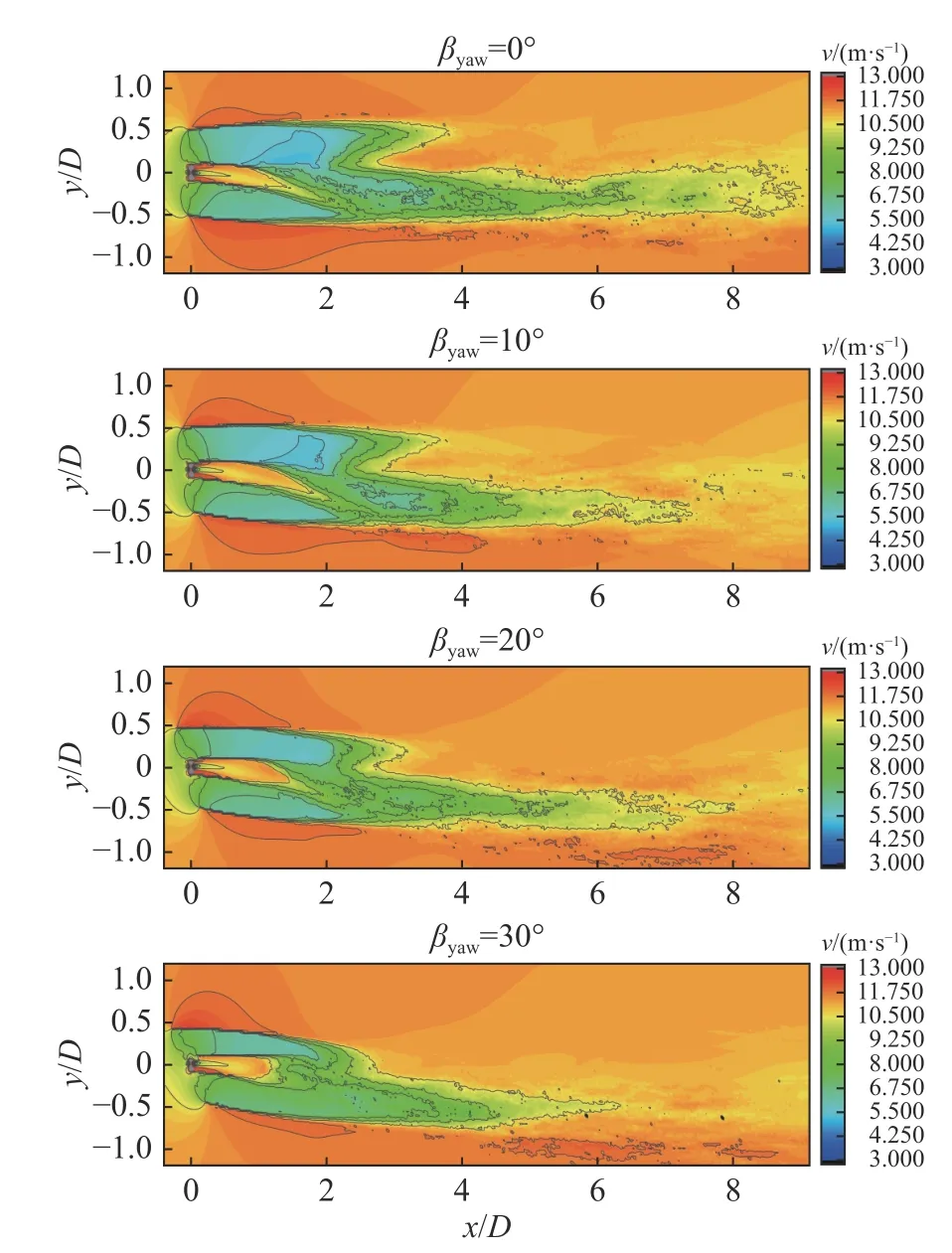
圖15 風(fēng)切變和塔架干擾下不同偏航角的輪轂高度速度云圖Fig.15 Hub height velocity contours at different yaw angles under wind shear and tower interference
圖16 是考慮風(fēng)切變和塔架后,偏航工況不同下游位置截面的速度云圖。從圖中可以看出風(fēng)切變模型會產(chǎn)生類似風(fēng)輪俯仰的效果,使得風(fēng)力機的尾流中心在豎直方向發(fā)生偏轉(zhuǎn),同時在偏航的作用下,尾流中心發(fā)生水平方向的偏轉(zhuǎn)。由于塔架的作用,在近尾流區(qū)下半部分的風(fēng)速低于上半部分,但在2D位置之后塔架作用效果減弱。
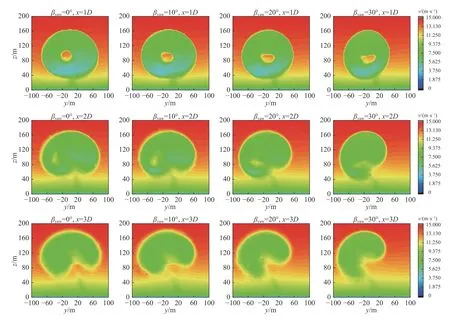
圖16 風(fēng)切變和塔架干擾下不同偏航角下游位置速度剖面Fig.16 Velocity profiles of downstream positions at different yaw angles under wind shear and tower interference
圖17 給出了考慮風(fēng)切變和塔架后風(fēng)力機俯仰0°~30°的風(fēng)力機中心截面速度云圖。當(dāng)俯仰角為0°時,直觀地反映了風(fēng)切變對尾流的抬升作用,且速度虧損恢復(fù)加快。塔架對尾流的顯著干擾效果在3D處之前較為明顯,而俯仰會降低塔架對近尾流區(qū)的干擾作用。
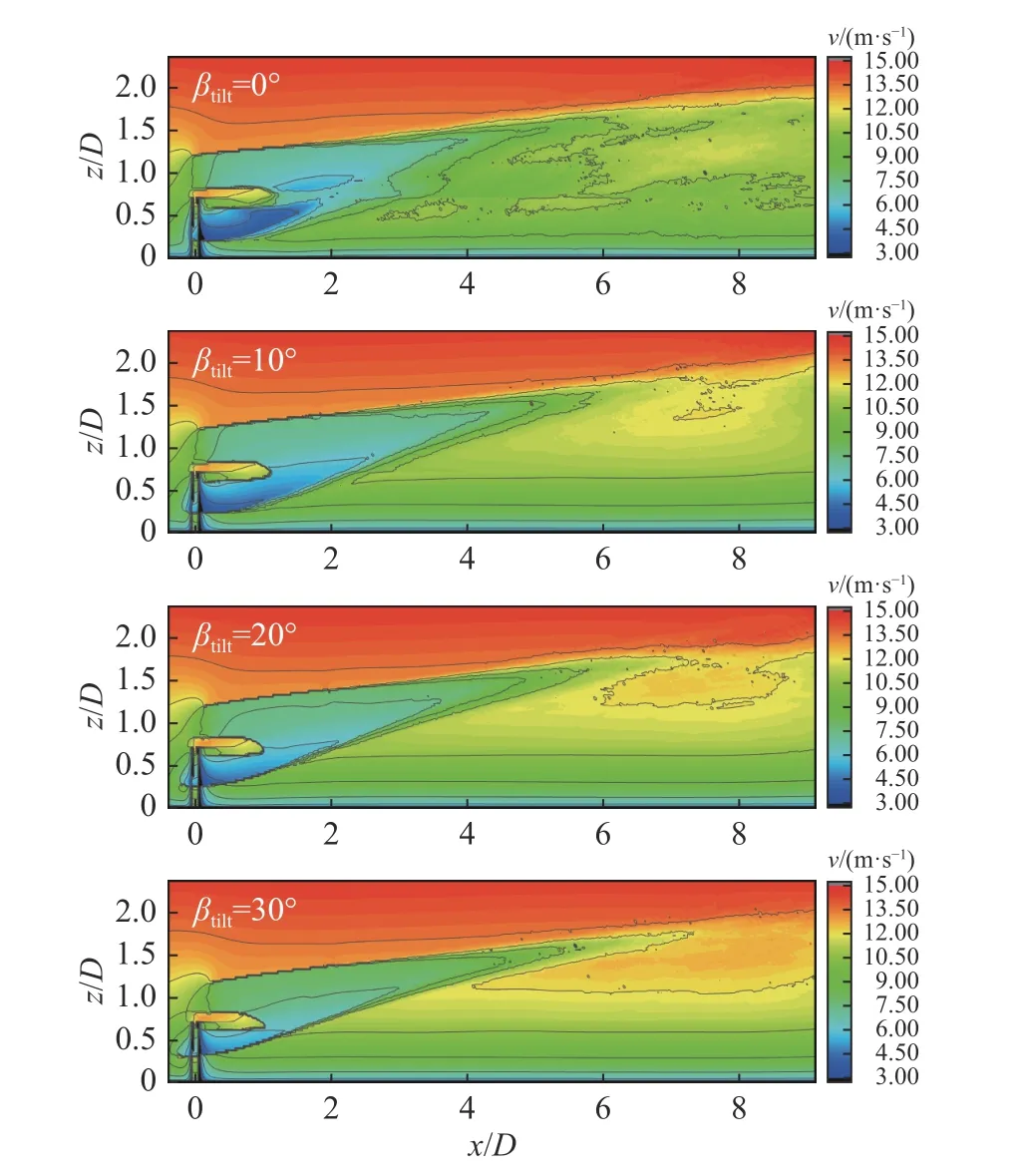
圖17 風(fēng)切變和塔架干擾下不同俯仰角的風(fēng)輪中心截面速度云圖Fig.17 Turbine center section velocity contours at different yaw angles under wind shear and tower interference
圖18 是考慮風(fēng)切變和塔架時,俯仰工況不同下游位置截面的速度云圖。從圖中可以看出,相比理想狀態(tài),風(fēng)切變和塔架的作用會進一步提高風(fēng)力機俯仰對尾流干擾的控制效果,加快速度虧損恢復(fù)。在風(fēng)力機未俯仰時,塔架對近尾流區(qū)下半部分擾動明顯,隨著俯仰角的增大,干擾效果逐漸降低。
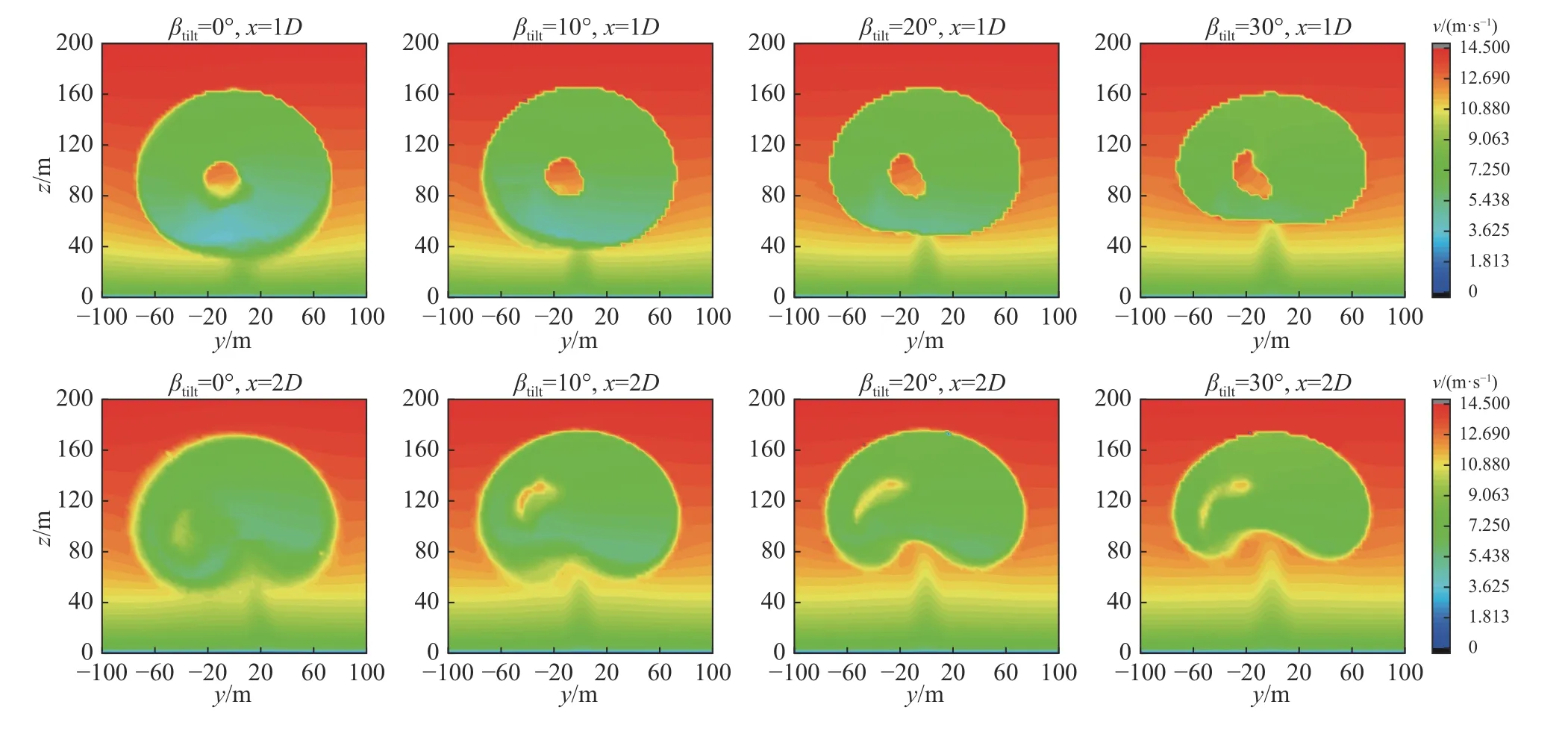
圖18 風(fēng)切變和塔架干擾下不同俯仰角下游位置速度剖面Fig.18 Velocity profiles of downstream positions at different tilt angles under wind shear and tower interference
圖19 給出了額定風(fēng)速11.4 m/s 下,各個控制策略的功率隨角度的變化。從圖中可以看出,在不考慮風(fēng)切變和塔架影響時,風(fēng)力機氣動功率隨偏航或俯仰的角度增大而近似呈線性減小;相較軸流工況,偏轉(zhuǎn)30°時兩種控制方式的功率降低約18%。在相同偏轉(zhuǎn)角度下,俯仰導(dǎo)致的功率降低小于偏航的結(jié)果,在偏轉(zhuǎn)30°時,俯仰較偏航功率高2%。考慮風(fēng)切變和塔架影響時,氣動功率隨偏航或俯仰角度的增大呈非線性降低,偏轉(zhuǎn)角度較小時,功率降低小;但在偏轉(zhuǎn)30°時,偏航的功率降低約20%,俯仰的功率降低約19%。偏航和俯仰在相同偏轉(zhuǎn)角度下的氣動功率差值更大,在偏轉(zhuǎn)30°時兩者的氣動功率相差3.8%。
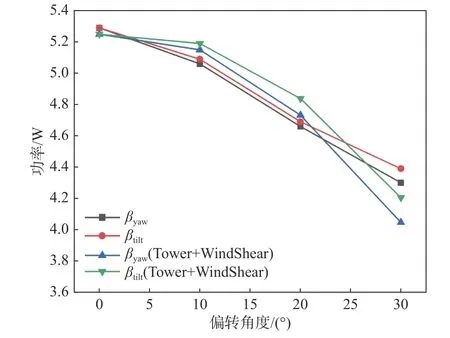
圖19 氣動功率隨偏轉(zhuǎn)角度的變化Fig.19 Aerodynamic power with different deflection angles
4 結(jié)論
基于升力線自由渦尾跡模型建立了風(fēng)力機氣動及尾流仿真模型,以NREL 5MW 風(fēng)力機為研究對象,進行了氣動特性仿真驗證,研究了理想狀態(tài)以及考慮風(fēng)切變、塔架干擾條件下,偏航和俯仰尾流結(jié)構(gòu)特性,結(jié)果表明:
1)通過Nibe 風(fēng)機的結(jié)果對比可以看出,采用升力線和自由渦尾跡方法對風(fēng)力機尾流進行仿真,其結(jié)果的精度要高于尾流數(shù)學(xué)模型的結(jié)果。
2)風(fēng)力機處于偏航或俯仰狀態(tài)時,尾流會發(fā)生偏轉(zhuǎn),并且隨著葉輪偏轉(zhuǎn)角度的增大,尾流渦結(jié)構(gòu)失穩(wěn)提前。在遠尾流區(qū)內(nèi),偏航角或俯仰角越大,相同位置處的湍流度越高,尾流摻混程度越高,從而加快尾流速度虧損的恢復(fù)。
3)風(fēng)切變對尾流會產(chǎn)生類似俯仰控制的效果,使得尾流抬升,并且豎直方向的速度差會促使速度虧損加快恢復(fù)。塔架會加重近尾流區(qū)內(nèi)的下半部分區(qū)域的速度虧損,風(fēng)輪俯仰可以減弱塔架的干擾,對提升風(fēng)電場總輸出具有重要意義。
4)偏航和俯仰會顯著改變尾流速度剖面形狀,形成不對稱的“腎”形尾流結(jié)構(gòu)。對于產(chǎn)生此種形狀的尾流結(jié)構(gòu)的物理機理需要進一步探究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學(xué)學(xué)報(2016年4期)2016-06-15 20:29:37
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應(yīng)用(2015年7期)2015-03-01 03:50:15