基于信息化的修船移泊管理系統構建
2023-12-28 12:18:28朱安慶唐海鑫
造船技術 2023年6期
朱安慶, 唐海鑫*, 朱 海, 陳 婷
(1.江蘇科技大學 船舶與海洋工程學院,江蘇 鎮江 212100;2.江蘇現代造船技術有限公司,江蘇 鎮江 212003)
0 引 言
近年來中國修船行業在國際市場的份額不斷擴大,但修船企業經營接單存在較大的不確定性,放大修船量在年周期分布上的波動,會出現集中修理的高峰時段,對修船企業承修能力的關鍵資源如塢位和泊位的利用產生較大的挑戰。修造船一體化企業通過造轉修的內部轉型,或租用閑置塢位和泊位等方式擴大修船產能,不僅加大修船市場產能過剩的情況,而且不利于行業整體的良性發展。從修船企業自身管理來看,如何高效利用有限的關鍵性資源如塢位和泊位成為亟待解決的問題。
通過分析修船移泊管理業務流程,運用矢量化地圖引擎、自動識別系統(Automatic Identification System,AIS)船舶動態定位、區域智能識別等信息化技術,在移泊的高效協同、計劃編排、可視化管理和信息及時反饋等方面開展研究,構建基于信息化的修船移泊管理系統[1]。
1 修船移泊管理現狀分析
國內修船企業修船移泊管理現狀如下:在經營部門接單后,工程部根據塢表計劃、航道信息、潮汐信息、天氣信息和工程實際進展情況等編寫每天的移泊計劃,由工程部通過Word和計算機輔助設計(Computer Aided Design,CAD)的文件形式進行發布,修船各部門接收發布的移泊計劃,由總管根據現場反饋的人力資源、場地資源和設備資源等信息進行調度安排,由服務車間派遣拖船對泊位中的船舶進行拖運。
分析修船移泊管理現狀,主要存在如下問題:
(1)移泊信息傳達不到位、不及時,信息追蹤困難。現有的移泊信息傳遞通常是工程部通過郵件、口頭、電話、紙質單和微信群等方式傳達至各部門,出現有些部門的員工接收移泊信息不及時的情況;信息傳遞至各部門存在時間差,導致在移泊開始時各部門之間的協調和準備工作不到位的情況;傳遞的紙質版信息文件易丟失,存在企業內部共享文件夾中的文件版本多,難以進行較好的分類處理,導致對歷史數據不能進行有效的分析利用。
(2)移泊計劃的編排較為粗放、容錯率低、缺乏業務數據聯動。現有的移泊計劃通常由工程部管理人員通過收集現場人員工程信息的反饋和現場實際查看的情況制定,一旦現場人員信息反饋不及時,則會影響計劃執行的準確性;在計劃制定后,移泊現場往往出現特殊情況而影響后續計劃的順利執行,這種缺乏數據聯動支撐的粗放式計劃制定方式較易造成計劃的實現效果不佳。
(3)線下難以模擬真實的移泊場景,計劃執行過程監控難。在計劃執行前使用文件的方式傳遞移泊策劃的結果,這樣不能對移泊的過程進行推演。在移泊計劃制定后,針對具體的計劃執行過程工程部管理人員不再參與,計劃執行的實時情況不能準確反饋,難以根據執行數據對后續計劃的編排進行調整優化。移泊計劃執行的最終狀態通過手工反饋的方式提交,不能通過定位的方式實時獲取移泊過程和移泊結果,只能在計劃執行后了解計劃的執行效果,不利于修船企業移泊管理整體效率的提升。
2 修船移泊管理需求分析
基于修船移泊管理需求的系統管理過程主要分為修船移泊計劃制定前的準備階段、修船移泊計劃制定和發布階段、修船移泊計劃制定后的反饋階段。基于信息化的修船移泊管理流程如圖1所示。

圖1 基于信息化的修船移泊管理流程
基于信息化的修船移泊管理需求分析如下:
(1)修船移泊計劃制定前的準備階段。為模擬真實的移泊環境,系統配備矢量地圖引擎和船舶模型庫。在修船移泊計劃制定前的準備階段,船舶、塢位、泊位、檔位和其他信息均可通過由遠程攝像頭和船舶定位報文采集的信息在系統中對相應的參數進行設置。
(2)修船移泊計劃制定和發布階段。前期在系統中設置的相關參數可在泊位地圖上準確呈現,通過移泊推演對移泊初級方案進行模擬仿真。通過仿真效果驗證計劃方案設計的可行性,并對方案存在的缺陷進行調整,再進行反復推演獲取最佳的移泊方案。在方案確定后通過郵件或企業微信進行自動定時發布。
(3)移泊計劃制定后的反饋階段。發布的移泊計劃自動在系統中存檔,總管和各部門在系統中及時接收發布的移泊計劃,展開移泊工作。在移泊計劃各部門的執行過程中,工程調度員可在系統上通過接入的AIS數據端準確了解船舶的移動情況,通過接入的監控系統實時觀察現場的計劃執行情況。在計劃出現偏差時,計劃編制人員可適時了解并進行計劃調整。系統自動生成船舶的拖運軌跡并保存在系統中,負責制定移泊計劃的人員可事后進行查看。
3 基于信息化的修船移泊管理系統設計
3.1 系統架構
系統基于瀏覽器-服務器結構(Browser-Server,B/S結構)和客戶機-服務器結構(Client-Server,C/S結構)混合架構[2],兼容移動端。系統架構如圖2所示,其中,PC為個人計算機。
3.2 系統角色
修船移泊管理系統是一個多部門、多人員實現協同操作、信息共享的平臺,不同部門的角色擁有不同的職責與權限[3]。修船移泊管理系統角色分配如圖3所示。
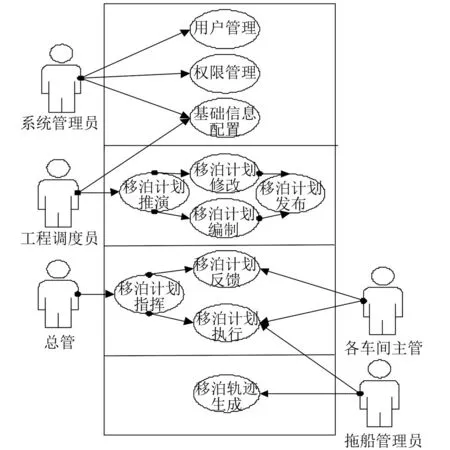
圖3 修船移泊管理系統角色分配
(1)系統管理員:負責對使用系統的人員進行日常的管理,對不同職位的人員進行對應的權限授予;可對移泊計劃在制定前需要的一些基礎信息進行合理配置。
(2)工程調度員:在系統中需要對移泊計劃制定前所需要的基礎信息進行相應配置;在計劃發布前應在系統中對制定的移泊計劃進行推演和修改,最終通過系統進行發布。
(3)總管:在系統中接收發布的移泊計劃,在計劃執行時對各部門進行統一指揮,并及時將計劃執行過程和效果反饋至系統。
(4)各車間主管:在系統中接收發布的移泊計劃,在計劃執行時及時將執行過程和效果反饋至系統。
(5)拖船管理員:在系統中接收發布的移泊計劃,在計劃執行時將船舶移泊軌跡同步上傳至系統。
3.3 系統功能模塊
通過對修船移泊管理系統的需求和業務流程分析[4],進行該系統的模塊設計。修船移泊管理系統功能結構如圖4所示。

圖4 修船移泊管理系統功能結構
(1)人員配置模塊:用戶管理和權限管理,對使用系統的人員進行權限授予和監督管理。
(2)資源配置模塊:碼頭基礎信息配置、船塢基礎信息配置和泊位基礎信息配置。對移泊計劃編制前涉及的各類現場資源進行基礎配置,保證計劃編寫的合理性和精確性。
(3)可視化界面配置模塊:移泊地圖基礎配置和船舶模型庫基本配置。通過由矢量地圖引擎建立的移泊地圖模擬現場的移泊過程,對制定的計劃進行可行性驗證,并可通過對移泊仿真模擬參數的調整獲取更佳的移泊計劃方案。
(4)計劃編制模塊:移泊計劃推演、移泊計劃編寫和移泊計劃發布。通過遠程調用現場數據、船舶位置信息,對需要發布的計劃進行推演和優化,并將驗證和優化后的移泊計劃通過郵件或企業微信端進行定時發布。
(5)計劃反饋模塊:泊位狀態反饋和日移泊計劃反饋。每日收集的泊位狀態及時反饋至系統,使工程調度員可準確監控計劃的執行情況,在必要時進行調整。
(6)計劃版本管理模塊:移泊計劃版本查看、移泊軌跡查看和移泊計劃存檔。可及時保存每次發布的移泊計劃,并可自動記載移泊船舶的移動軌跡。
4 基于信息化的修船移泊管理系統實現
4.1 技術支持
修船移泊管理系統的實現主要基于矢量化地圖引擎、AIS船舶動態定位和智能區域識別等3項技術。
4.1.1 矢量化地圖引擎
為滿足廠區地圖自定義的使用場景,采用ArcGIS軟件制作廠區矢量化地圖,并基于DevExpress Map組件封裝系統使用的矢量化地圖引擎。通過解析shp文件,獲取點、線、面對象的坐標信息并存儲,實現多圖層的地圖快速配置和多端展示[5]。B/S架構的可視化展示端接收地圖基礎圖元信息,采用Canvas繪制呈現。
一般來說,在地理信息系統(Geographic Information System,GIS)中直接繪制廠區地圖,相對復雜、操作難度大,可采用CAD格式的廠區地圖作為GIS軟件的輸入,并添加地理信息坐標,輸出標準的shp文件。船舶作為地圖上展示的動態元素,可按船型/工程制作矢量化船舶模型圖。
4.1.2 AIS船舶動態定位
調用第三方AIS定位接口服務,定時獲取設定范圍接收區域內的船舶AIS信息[6],包括靜態信息[水上移動通信業務標識碼(Maritime Mobile Service Identity,MMSI)、船名、國際海事組織編碼(IMO Number)、長度、寬度和船舶類型等]和動態信息(經緯度、航行狀態、航首向和航速等)。在系統修理工程初始化中預設船舶的IMO Number,根據IMO Number可匹配船舶的具體定位信息。
4.1.3 智能區域識別
移泊管理存在兩種區域識別場景:①識別修理船舶當前的具體船塢、碼頭或泊位;②在多艘修理船舶進入某具體區域時,判斷具體的停靠檔位次序。采用定位設備獲取區域輪廓點和檔位方向識別點的經緯度信息,并預設在系統中。船舶中心點通過調用AIS船舶動態定位接口服務實時獲取。
(1)識別場景①:選擇合適的區域輪廓點對某一具體區域標識,即將區域采用閉合的凸多邊形空間表示,將船舶中心點位置標識為P,船舶位于具體區域位置問題可簡化為判定點P是否位于凸多邊形空間內,具體如圖5所示。根據向量叉積法,按照逆時針(順時針)取向量進行叉乘,所得值同號則說明點在多邊形內部,即取向量AB和AP、BC和BP、CD和CP、DE和DP、EA和EP進行叉乘,判斷所得值是否同號。

圖5 移泊區域識別
(2)識別場景②:移泊檔位識別如圖6所示。若約定A號泊位1號檔位為內,2號檔位向外,由內向外取2點構建方向向量U,取相鄰2艘修理船舶中心點P1和P2構建向量V,通過向量V和U同向或反向判定船舶的停靠次序,同向即1號船為01檔,2號船為02檔,反之2號船為01檔,1號船為02檔。

圖6 移泊檔位識別
4.2 實現流程
移泊管理系統實現流程如圖7所示。根據船廠閉合的地理經緯度坐標點集和區域方向向量建立智能識別區域,利用矢量化地圖引擎模擬船廠的實際移泊環境,通過AIS船舶動態定位技術獲取船舶的相關數據信息。通過對上述3項技術的整合,在系統可視化界面中對移泊管理流程進行相應的展示,根據在廠船舶和計劃進廠船舶在地圖界面進行移泊操作,推演合適的移泊路徑,自動生成移泊計劃,并發布現場使用。
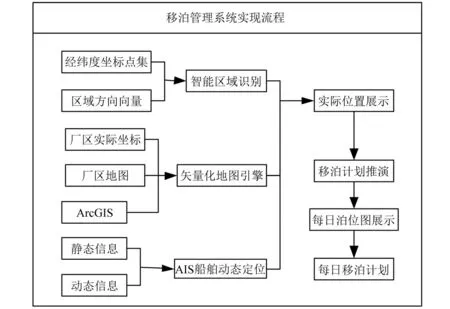
圖7 移泊管理系統實現流程
4.3 界面應用
移泊識別區界面如圖8所示。在系統界面上可看到建立的識別區內泊位、塢位和檔位的實時狀態,根據獲取的泊位、塢位和檔位的實時狀態對第二天的移泊計劃進行制定和推演。

圖8 移泊識別區界面
移泊計劃編制與發布界面如圖9所示。系統的使用人員可在該界面上進行移泊計劃的推演、制定、修改和發布。

圖9 移泊可視化編制和發布界面
5 結 語
通過對修船企業現有移泊管理現狀和業務需求的分析,針對當前修船企業移泊管理存在線下協同不夠高效、計劃編排較粗放和信息反饋不及時等問題,運用信息化手段,將矢量化地圖引擎、AIS船舶動態定位和區域智能識別等技術融入修船移泊管理系統,實現修船移泊流程的信息化管理,為企業提高泊位使用效率提供技術支撐,為逐步實現數字化修船邁出堅實的一步。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
航海(2005年4期)2005-04-29 00:00:00