基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法
2023-12-27 12:59:36李文偉朱龍陳子文
計算技術(shù)與自動化 2023年4期
李文偉,朱龍,陳子文
(1.廣西電網(wǎng)有限責任公司欽州供電局,廣西 欽州 535000;2.南京南瑞繼保電氣有限公司,江蘇 南京 530023)
由于我國城市化進程速度較快,人們需求量較大,變電站也因此加重自身負荷,影響了變電站的工作運行效率[1-2],且易出現(xiàn)變電站故障。如果有些故障沒有被及時監(jiān)測到,又位于變電站空間毫米級區(qū)域,對變電站進行檢修時就容易出現(xiàn)漏檢。為了改善這一問題,需要對變電站空間毫米級區(qū)域故障三維場域開展以下監(jiān)測研究。
王競等人[3]提出牽引變電站直流斷路器機械狀態(tài)監(jiān)測與故障診斷研究方法,為了監(jiān)測出變電站故障,該方法以直流斷路器為對象,采集該設(shè)備的信號,從中確定變電站傳感器的主要型號,再通過提取信號特征模擬出常見的故障,在監(jiān)測出變電站故障的同時還判斷出故障類型,該方法采集的振動信號不夠全面,存有監(jiān)測效果差的問題。王鳴譽等[4]提出利用Apriori算法實現(xiàn)變電站二次系統(tǒng)故障診斷方法,該方法優(yōu)先對SCD文件開展了解析,然后從中構(gòu)建出變電站物理回路的映射關(guān)系,根據(jù)以往的歷史故障數(shù)據(jù)對變電站二次系統(tǒng)回路開展故障監(jiān)測,并采用Apriori算法對監(jiān)測到的故障信息關(guān)聯(lián)規(guī)則進行計算,從中判斷出變電站故障類型,在監(jiān)測到變電站故障的同時還診斷出變電站故障,該方法的計算結(jié)果存有誤差,存在監(jiān)測精度低的問題。陳軍等人[5]提出Petri網(wǎng)智能變電站保護控制故障診斷與定位方法研究,該方法優(yōu)先獲取了變電站數(shù)據(jù),根據(jù)獲取結(jié)果構(gòu)建變電站Petri模型,利用該模型對變電站設(shè)備狀態(tài)進行故障監(jiān)測,并將監(jiān)測結(jié)果輸送到Petri子網(wǎng)中,以此取得變電站故障信息狀態(tài),最終依據(jù)獲取結(jié)果利用Petri網(wǎng)模型對變電站故障狀態(tài)進行故障定位,實現(xiàn)變電站故障監(jiān)測診斷與定位,該方法獲取的故障狀態(tài)存有欠缺,存在監(jiān)測有效性低的問題。
因此,提出基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法。
1 三維區(qū)域圖像校正
1.1 雙目立體視覺模型建立
雙目立體視覺[6]可以模擬人眼利用設(shè)置的雙攝像頭對想要獲取的目標定位,通過對比圖像與成像之間的差異性,從中獲取目標的三維位置數(shù)據(jù),實現(xiàn)目標體的標定,完成目標體的圖像獲取。
針對雙目立體視覺的工作原理,采用雙目立體視覺對變電站空間毫米級區(qū)域故障三維場域的三維位置信息進行標定,從而實現(xiàn)變電站三維空間毫米級區(qū)域故障三維區(qū)域圖像采集。為此基于雙目立體視覺建立采集模型,如圖1所示。
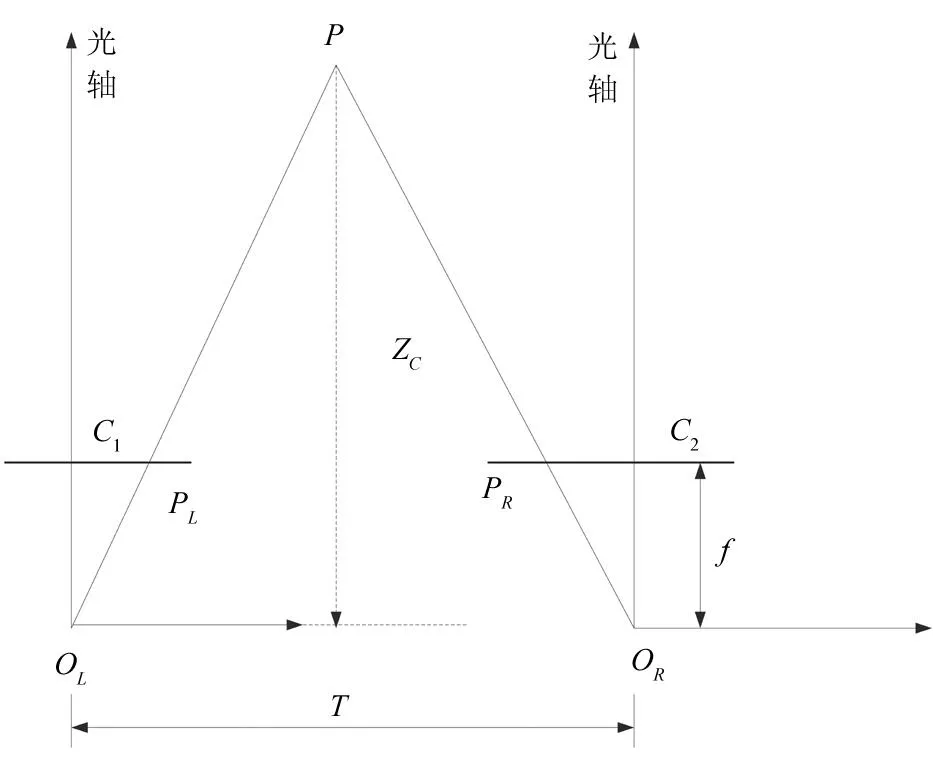
圖1 構(gòu)建的雙目立體視覺模型示意圖
圖1中,(C1,C2)表示雙目立體視覺的相機,其焦距與光軸相互平行且具有一致性,C1坐標系中,P屬于空間位置坐標,即(XC,YC,ZC);模型中圖像像素左坐標系定義為(uL,vL),右坐標系定義為(uR,vR)。
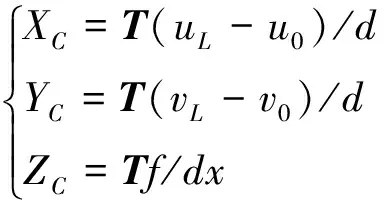
按照設(shè)計結(jié)果,采用幾何知識對特征點P及C1做相機投影點位置關(guān)系獲取,表示為:

(1)
式中,(u0,v0)表示實際坐標點,焦距則由f定義,d表示視差,(x,y)表示像素位置,T表示平移向量。
獲取特征點P坐標系:
(2)
雙目立體視覺系統(tǒng)獲取成像后與實際圖像存在偏差,因此要及時糾正相機位置,令其滿足正常的成像要求。
1.2 雙目立體視覺相機標定
為了能夠更好地實現(xiàn)變電站空間毫米級區(qū)域故障三維場域圖像的采集,需要標定建立的雙目立體視覺模型相機,因而采用二維棋盤格圖像校準板對相機視覺進行標定,具體步驟如下:
(1)令棋盤圖像屬于標定板,將其放置在平面中,并從多個角度對其進行拍攝;
(2)提取圖像特征點,取得關(guān)鍵的坐標位置信息;
(3)獲取相機內(nèi)外參數(shù);
(4)優(yōu)化相機內(nèi)外部參數(shù),取得全部參數(shù)。
按照以上四個步驟,采用MATLAB標定雙目立體視覺相機,由于相機有兩個攝像頭,所以從多種角度拍攝后會獲取20幅雙圖像組,再進行標定。依據(jù)標定結(jié)果獲取雙目立體視覺相機的平移向量,定義為:T=[-70.215,1.06498,-0.18542],而相機之間的間距標定為70 mm,平移參數(shù)為70.52315 mm,兩者相差較小,屬于校正后的參數(shù)。
最終利用校正后的雙目立體視覺模型獲取變電站空間毫米級區(qū)域故障三維場域圖像,實現(xiàn)圖像采集。
1.3 變電站空間毫米級區(qū)域故障三維場域圖像濾波
雙目立體視覺模型采集到變電站空間毫米級區(qū)域故障三維場域圖像后,會將圖像成像在探測器中,成像過程中會因為環(huán)境光線的影響導致圖像遭受噪聲污染,影響后續(xù)操作。所以為了提升監(jiān)測效果,采用均值濾波方法對采集的圖像開展去噪處理[7-8]。
采用均值濾波方法將采集圖像的噪聲進行分配,分配位置為圖像像素中,達到抑制噪聲的目的。
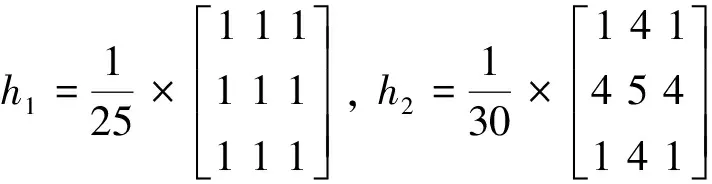
設(shè)置圖像像素由(p,q)定義,并設(shè)定一個以像素作為中心的模板,令模板大小尺寸為5×5,因而模板的設(shè)定模式為:
(3)
式中,h定義為模板類型。
采用加權(quán)平均方法計算出各個模板的像素灰度值,結(jié)合計算結(jié)果,對其進行均值濾波,定義如下:
(4)
式中,g(p,q)表示處理后的去噪圖像,f(r,c)表示采集的變電站空間區(qū)域故障圖像,(r,c)表示像素坐標,mn表示尺寸,hpq表示類型。
通過以上操作,實現(xiàn)基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域圖像的濾波處理。
2 變電站空間毫米級區(qū)域故障三維場域監(jiān)測
2.1 基于改進Hu不變矩的故障特征向量
根據(jù)圖像濾波處理結(jié)果,消除了圖像噪聲數(shù)據(jù),以此采用改進Hu不變矩提取變電站空間毫米級區(qū)域故障三維場域特征[9]。
采用Hu不變矩提取濾波處理后的變電站空間毫米級區(qū)域故障三維區(qū)域特征,從中取得由7個不變矩提取的故障特征向量,表示為:
I=(φ1,φ2,φ3,φ4,φ5,φ6,φ7)
(5)
式中,φn表述故障特征子向量,I表述故障特征向量。
由于采用傳統(tǒng)的Hu不變矩提取變電站空間圖像故障特征存有缺陷,為避免這種問題,需要對Hu不變矩進行改進,因而設(shè)置縮放比例因子λ的坐標表述為(i′,j′),未加入λ前的坐標系則表示為(i,j),令其滿足下述關(guān)系:
(6)

(j′-j′)q+f′(i,j)
(7)
歸一化中心矩,定義為:
(8)

(8)
式中,φ表示不變矩提取的故障特征向量。
把λ引入到Hu矩提取的故障特征向量中,其故障特征向量轉(zhuǎn)換成:
I=(λ2φ1,λ4φ2,λ6φ3,λ6φ4,λ12φ5,λ8φ6,λ12φ7)
(9)
因此基于改進的Hu不變矩提取的變電站空間毫米級區(qū)域故障三維場域特征向量表示如下:
I=(I1,I2,I3,I4,I5,I6,I7)=φ1R2(φ2)
R3(φ3)R3(φ4)R6(φ5)R4(φ6)R6(φ7)
(10)
式中,R定義為改進算子,(I1,I2,I3,I4,I5,I6,I7)表示改進Hu矩獲取的故障特征向量。
2.2 變電站空間毫米級區(qū)域故障三維場域監(jiān)測
基于改進Hu矩獲取的故障特征向量,將故障特征向量數(shù)據(jù)劃分成訓練樣本及測試樣本,并輸送到建立的正則化極限學習機中訓練,利用該模型監(jiān)測變電站空間毫米級區(qū)域故障三維場域,實現(xiàn)變電站空間毫米級區(qū)域故障三維場域的監(jiān)測。
獲取極限學習機ELM數(shù)學模型[10]方程表達式:
(11)
式中,x表示故障特征向量輸入變量,WL(x)表示故障特征向量輸出變量,L表示神經(jīng)元數(shù)量,βi表示系數(shù),ai表示輸入權(quán)重,bi定義為偏置,其輸出函數(shù)定義為G(ai,bi,x)。
G(ai,bi,x)也可以定義為:
G(ai,bi,x)=g(ai·x+bi)
(12)
式中,g(·)表述激活函數(shù)。

(13)
式中,l表示組數(shù)。
轉(zhuǎn)換方程(13),形成矩陣形式,表示為:
(14)
式中,v(xi)表示優(yōu)化后的輸出函數(shù),可以有效提升極限學習機ELM的監(jiān)測精度,m表示樣本集。
將正則化因子κ引入到ELM模型中,形成RELM正規(guī)則極限學習機,以此對β求解:

(15)
式中,εl表示訓練偏差,MELM表示引入κ后的ELM模型。
優(yōu)化方程(15),優(yōu)化結(jié)果定義為:
al,j(βj-yl,j+εl,j)
(16)
式中,al,j表示Lagrange乘數(shù),εl,j表示偏置,l表示層數(shù),j定義為單元數(shù)量,yl,j表示期望輸出值。
根據(jù)以上流程,將故障特征訓練樣本數(shù)據(jù)用作正則化極限學習機RELM模型的輸入、輸出,利用該模型對故障特征向量訓練樣本數(shù)據(jù)實施訓練操作,最終依據(jù)輸出結(jié)果實現(xiàn)變電站空間毫米級區(qū)域故障三維場域監(jiān)測。
3 實例實驗與結(jié)果分析
為了驗證基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法的整體有效性,需要對該方法開展實驗對比測試。
采用基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法(方法1)、利用Apriori算法實現(xiàn)變電站二次系統(tǒng)故障診斷方法(方法2)和Petri網(wǎng)智能變電站保護控制故障診斷與定位方法研究(方法3)實行對比測試。
(1)針對采集的變電站空間毫米區(qū)域故障三維場域圖像,設(shè)置該圖像尺寸大小為256×256×8bit。由于獲取的原始圖像中存有不同類型及密度的噪聲,所以以客觀標準衡量變電站空間圖像的濾波質(zhì)量數(shù)值指標,其衡量標準通過下述方程定義:
(17)
式中,PSNR表示峰值信噪比,ISNR表示信噪比改善因子,fy(i,j)表示初始圖像像素值,o(i,j)表示濾波處理后的圖像輸出像素值,f(i,j)定義為受污染圖像,MSE表示均方誤差,i、j表示像素值,M、N定義為圖像系數(shù)。
根據(jù)方程(17)確立結(jié)果,采用方法1、方法2和方法3對具有噪聲數(shù)據(jù)的變電站空間圖像進行濾波處理,并將處理結(jié)果與原始圖像對比,從而驗證了三種方法的去噪效果,測試結(jié)果如圖2所示。
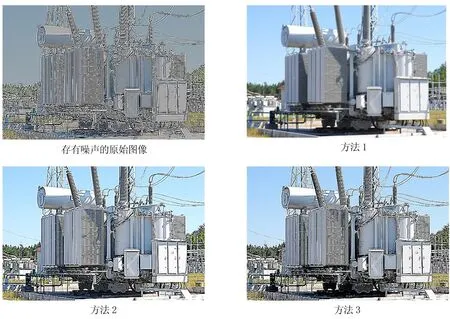
圖2 變電站空間圖像濾波處理對比測試
由圖2可知,由于原始圖像中存有大量噪聲數(shù)據(jù),所以采用三種方法消除噪聲數(shù)據(jù)。經(jīng)對比發(fā)現(xiàn),方法1對原始圖像噪聲數(shù)據(jù)開展濾波處理后,其處理結(jié)果明顯要優(yōu)于其余兩種方法,其圖像清晰度、質(zhì)量最高,說明方法1的濾波處理結(jié)果最好。
而方法2和方法3在處理圖像時,可以消除大量噪聲數(shù)據(jù),圖像內(nèi)還存有少量噪聲數(shù)據(jù),導致方法2和方法3所處理的圖像清晰度較低,所以可知方法1的濾波處理結(jié)果最佳,而其余兩種方法的濾波處理結(jié)果較差。
(2)為了能夠更好地對變電站空間毫米級區(qū)域故障三維場域監(jiān)測,本次實驗在變電站空間毫米級區(qū)域中設(shè)置了六種斷路器機械故障狀態(tài),監(jiān)測前優(yōu)先獲取變電站空間斷路器的能量譜特征值,并對六種故障狀態(tài)進行劃分,前五種狀態(tài)數(shù)據(jù)為訓練樣本,后一種狀態(tài)數(shù)據(jù)為測試樣本。
設(shè)置變電站空間斷路器的合閘為1、分閘為3、180 V欠壓合閘為2、160 V欠壓合閘為5、合閘線圈老化為4、合閘卡滯為6。按照設(shè)置結(jié)果,采用三種方法對六種故障狀態(tài)下的變電站空間斷路器監(jiān)測,根據(jù)監(jiān)測結(jié)果判斷出三種方法是否合理地監(jiān)測出變電站空間斷路器故障,測試結(jié)果如圖3所示。
由圖3可知,在樣本數(shù)據(jù)量逐漸提升的情況下,三種方法的監(jiān)測精度都有所提高,而在設(shè)置的六組故障狀態(tài)下,方法1的監(jiān)測效果明顯優(yōu)于其余兩種方法。這是因為方法1對變電站空間毫米級區(qū)域故障三維區(qū)域圖像開展了濾波處理,從中消除了環(huán)境光線等多種因素對圖像造成的噪聲污染,以此大大提升了該方法對變電站空間故障監(jiān)測的監(jiān)測效率及監(jiān)測精度。
4 結(jié) 論
本文提出了基于雙目立體視覺的變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法。該方法利用雙目立體視覺采集的變電站空間圖像,并對該圖像開展預(yù)處理,然后提取了變電站故障特征向量數(shù)據(jù),最終將特征向量輸送到建立的監(jiān)測模型中訓練,獲取的圖像清晰度、質(zhì)量最高。對六種故障狀態(tài)進行檢測后,表現(xiàn)出的準確率最高,維持在80%以上,最高接近100%,在濾波處理方面效果較優(yōu)越,日后在變電站空間毫米級區(qū)域故障三維場域監(jiān)測方法中有著長遠的發(fā)展前景。
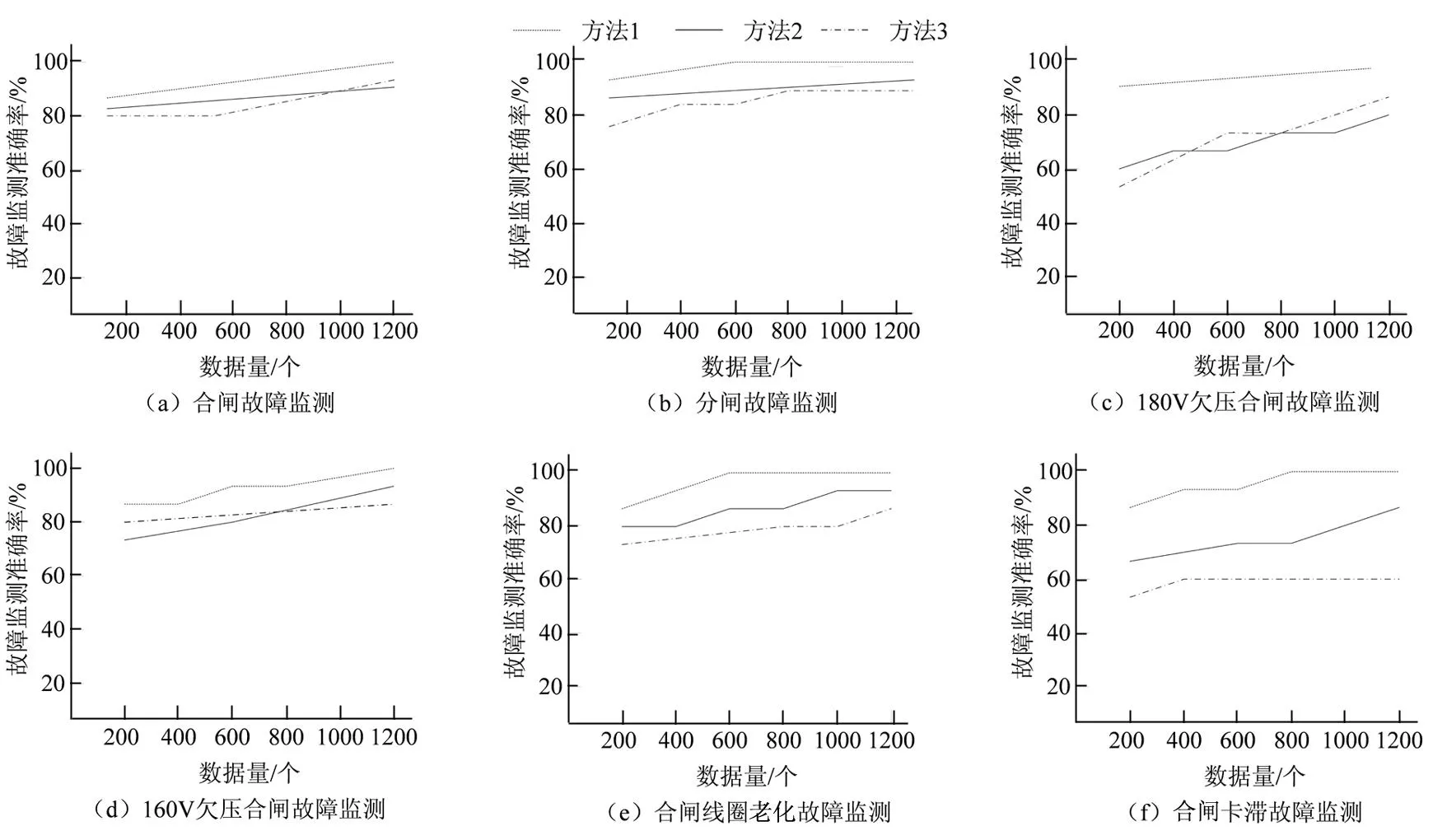
圖3 六種故障狀態(tài)下的變電站空間監(jiān)測對比測試
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
汽車維護與修理(2016年10期)2016-07-10 08:17:41
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年5期)2016-05-17 05:35:57
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
河南電力(2015年5期)2015-06-08 06:01:45
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
電測與儀表(2015年5期)2015-04-09 11:30:52