五相永磁同步電機改進型無差拍直接轉(zhuǎn)矩和磁鏈控制
2023-12-26 03:30:30劉國海孫汶超周華偉劉正蒙
電工技術(shù)學報 2023年24期
關(guān)鍵詞:策略
劉國海 孫汶超 周華偉 劉正蒙
五相永磁同步電機改進型無差拍直接轉(zhuǎn)矩和磁鏈控制
劉國海 孫汶超 周華偉 劉正蒙
(江蘇大學電氣信息工程學院 鎮(zhèn)江 212013)
傳統(tǒng)無差拍直接轉(zhuǎn)矩磁鏈控制(DB-DTFC)策略應(yīng)用于五相永磁同步電機(PMSM)時存在穩(wěn)態(tài)性能差、轉(zhuǎn)矩和磁鏈耦合、諧波電流大等問題,該文提出一種改進型DB-DTFC策略。首先,為實現(xiàn)轉(zhuǎn)矩和磁鏈的解耦控制,在兩相靜止坐標系中對定子電壓與轉(zhuǎn)矩和磁鏈之間的關(guān)系進行分析,求解滿足控制要求的電壓矢量。其次,設(shè)計電流和磁鏈觀測器補償數(shù)字控制系統(tǒng)的延時。再次,采用基于4個非零電壓矢量的空間矢量脈寬調(diào)制(SVPWM)技術(shù),抑制相電流的3次諧波分量。實驗結(jié)果表明,該策略計算簡便,抑制了轉(zhuǎn)矩和磁鏈脈動,降低了3次諧波電流,提升了控制系統(tǒng)動穩(wěn)態(tài)性能。
無差拍控制 直接轉(zhuǎn)矩和磁鏈控制 永磁同步電機(PMSM) 延時補償 空間矢量脈寬調(diào)制(SVPWM)
0 引言
與三相永磁同步電機(Permanent Magnet Syn- chronous Motor, PMSM)相比,以五相PMSM為代表的多相電機驅(qū)動系統(tǒng)由于擁有更多的控制自由度、較小的母線電流紋波、更高的母線電壓利用率等優(yōu)點,在電動汽車、艦船驅(qū)動等領(lǐng)域得到廣泛關(guān)注[1-3]。
直接轉(zhuǎn)矩控制(Direct Torque Control, DTC)和矢量控制(Vector Control, VC)是工業(yè)生產(chǎn)中最常用的PMSM控制策略。相比于VC[4-5],DTC以轉(zhuǎn)矩和磁鏈作為控制變量,采用滯環(huán)比較器和開關(guān)表相結(jié)合的方式實現(xiàn)對電機的控制,具有結(jié)構(gòu)簡單、動態(tài)響應(yīng)速度快等特點[6-8]。然而,傳統(tǒng)DTC無法精確識別轉(zhuǎn)矩和磁鏈誤差的大小,在單一控制周期內(nèi)輸出單一電壓矢量,因此存在轉(zhuǎn)矩和磁鏈脈動大、電流諧波含量高等缺點。模型預測轉(zhuǎn)矩控制(Model Predictive Torque Control, MPTC)依據(jù)價值函數(shù)最小化原則,從有限控制集中選擇最優(yōu)電壓矢量[9-11],提升了轉(zhuǎn)矩和磁鏈動態(tài)響應(yīng)能力。然而,MPTC存在迭代計算復雜、權(quán)重系數(shù)調(diào)整困難等缺點。無差拍直接轉(zhuǎn)矩和磁鏈控制(Deadbeat Direct Torque and Flux Control, DB-DTFC)策略以電機模型為基礎(chǔ),在一個控制周期內(nèi)以消除轉(zhuǎn)矩和磁鏈誤差為目標求解電壓矢量,控制系統(tǒng)結(jié)構(gòu)簡單、無需多余參數(shù)整定,因此受到廣泛關(guān)注。文獻[12]基于定子磁鏈差分法和PMSM復功率提出了兩種簡化的DB-DTFC策略,提高了穩(wěn)態(tài)性能、降低了計算量,但動態(tài)性能有待提升。文獻[13]提出一種用于三相PMSM的基于兩相同步旋轉(zhuǎn)坐標系(dq)的傳統(tǒng)DB-DTFC策略,提升了轉(zhuǎn)矩和磁鏈的穩(wěn)態(tài)性能。然而其無差拍模型不理想、定子電壓求解復雜。另外,其未考慮大誤差情況下電壓限制帶來的長調(diào)節(jié)時間問題。文獻[14]將文獻[13]策略與最小時間斜坡軌跡法相結(jié)合,充分利用逆變器電壓求解轉(zhuǎn)矩變化率最大的定子電壓,以提高響應(yīng)的快速性和穩(wěn)定性。然而該策略運算繁瑣,計算量會隨著誤差值的增大而增加。文獻[15-16]提出了一種基于定子磁鏈定向的DB- DTFC策略,該策略根據(jù)轉(zhuǎn)矩誤差控制負載角的變化實現(xiàn)無差拍控制,實現(xiàn)了轉(zhuǎn)矩和磁鏈的獨立調(diào)節(jié),提高了穩(wěn)態(tài)和動態(tài)性能。然而,不合適的參考磁鏈會對磁鏈控制精度產(chǎn)生較大影響,嚴重時可能導致控制系統(tǒng)不穩(wěn)定。另外,在設(shè)計無差拍系統(tǒng)時通常假設(shè)控制變量的采樣和計算同時發(fā)生。然而,由于數(shù)字控制系統(tǒng)存在時間延遲,會引起振蕩現(xiàn)象。此外,電機運行過程中存在參數(shù)攝動和外部擾動,需要對這些擾動進行估計以提高系統(tǒng)魯棒性能[17-19]。
為實現(xiàn)對轉(zhuǎn)矩和磁鏈的精確控制,提高電機的穩(wěn)態(tài)和動態(tài)性能。本文針對五相PMSM,提出一種改進型DB-DTFC策略。首先,為解決轉(zhuǎn)矩和磁鏈之間的耦合問題,根據(jù)ab坐標系上的PMSM數(shù)學模型,分析電壓矢量對轉(zhuǎn)矩和磁鏈變化的影響,求解合適的定子電壓矢量。其次,為解決數(shù)字系統(tǒng)的延時問題,設(shè)計觀測器對電流、磁鏈和轉(zhuǎn)矩進行預測。最后,采用空間矢量脈寬調(diào)制(Space Vector Pulse Width Modulation, SVPWM)合成目標電壓矢量以抑制3次諧波電流。
1 五相PMSM數(shù)學模型
假設(shè)五相PMSM僅含基波反電動勢,忽略定子繞組間互感和漏感,則該電機在ab坐標系上的數(shù)學模型可表示為


式中,s=[sasb]T、s=[sasb]T、s=[sasb]T、r= [fcosrfsinr]T分別為定子電壓、磁鏈、電流和永磁磁鏈;sa,sb、sa,sb、sa,sb、fcosr,fsinr分別為s、s、s、r在a、b軸上的分量;s為定子電阻;f為永磁磁鏈的幅值;e為電磁轉(zhuǎn)矩;為極對數(shù);s為電感;r為轉(zhuǎn)子位置角。
定子磁鏈s的幅值及相位可分別表示為

2 改進型DB-DTFC策略
2.1 DB-DTFC原理
為了分析電壓矢量對電機轉(zhuǎn)矩的影響,由式(3)求得轉(zhuǎn)矩變化率為
將式(1)和式(2)代入式(5),可得

假設(shè):①每個控制周期內(nèi)非零電壓矢量的作用時間為k,其取值范圍為0≤k≤s;②在剩余的控制周期s-k中作用零矢量。根據(jù)該假設(shè),一個控制周期內(nèi)轉(zhuǎn)矩變化量可表示為


其中


式中,為電壓矢量和永磁磁鏈矢量的夾角;r為轉(zhuǎn)子電角速度。假設(shè)所有變量在每個控制周期內(nèi)保持恒定,則在一個控制周期內(nèi)轉(zhuǎn)矩誤差可表示為

為了精確控制定子磁鏈,使其在每個控制周期結(jié)束時達到給定值。對式(1)進行離散化,可得

忽略定子電阻,由于零電壓矢量對定子磁鏈基本無影響,定子磁鏈的變化取決于非零電壓矢量及其作用時間。因此,式(12)可進一步表示為

在此基礎(chǔ)上,根據(jù)圖1定子磁鏈增量計算,在一個控制周期內(nèi)定子磁鏈誤差可表示為

式中,為電壓矢量和定子磁鏈矢量的夾角。相比于其他項,|s()k|2很小,可忽略不計。因此,在一個控制周期內(nèi)磁鏈的誤差可進一步表示為

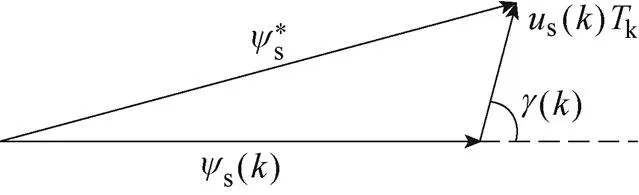
圖1 定子磁鏈增量計算
基于上述分析,為了實現(xiàn)轉(zhuǎn)矩和磁鏈的無差拍控制,時刻所作用電壓矢量應(yīng)同時消除式(11)和式(15)所表示的轉(zhuǎn)矩和磁鏈誤差值,電壓矢量選擇如圖2所示。圖中,正多邊形表示逆變器的輸出電壓極限,由于五相PMSM需考慮諧波抑制,采用SVPWM所能調(diào)制電壓的最大值max為正多邊形的內(nèi)切圓半徑。
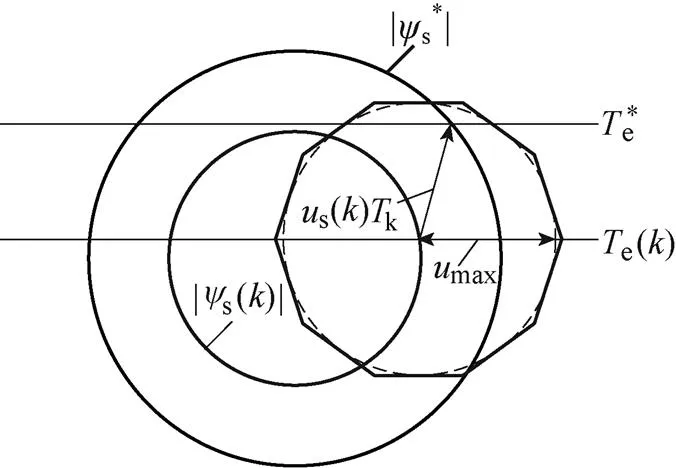
圖2 電壓矢量選擇
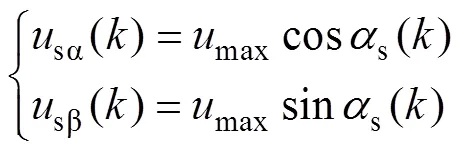
因此,聯(lián)立式(11)和式(15)求解參考電壓矢量。為了改善系統(tǒng)的動態(tài)響應(yīng)能力,將|s()|設(shè)置為max。最終解得參考電壓矢量相位s及每個控制周期的作用時間k分別為


其中

由此,時刻定子電壓可表示為
根據(jù)上述分析,為消除轉(zhuǎn)矩誤差,電壓矢量的最小作用時間需要k。電機運行時磁鏈會有微小變化,通過修正s可保證磁鏈控制精度,進而實現(xiàn)轉(zhuǎn)矩和定子磁鏈控制的獨立性。相較于傳統(tǒng)DB- DTFC,所提策略計算更為簡便,電壓矢量對轉(zhuǎn)矩和磁鏈實現(xiàn)了解耦控制,提升了轉(zhuǎn)矩和磁鏈的跟蹤性能,進而保證電機優(yōu)越的穩(wěn)態(tài)和動態(tài)性能。
2.2 定子電流觀測
在數(shù)字控制系統(tǒng)中,控制變量的采樣周期超前控制周期會造成一拍延時問題。因此,通過設(shè)計觀測器預測下一控制周期的定子電流和磁鏈,以實現(xiàn)無差拍控制。
定子電壓和磁鏈在d、q軸上的分量可表示為
式中,sd,sq、sd,sq、sd,sq分別為s、s、s在d、q軸上的分量。在電機運行時,s、s、f等參數(shù)發(fā)生變化會產(chǎn)生擾動電壓Ddq。設(shè)計如圖3所示的PI控制器對這部分電壓進行補償。根據(jù)式(20),+1時刻的定子電流可表示為
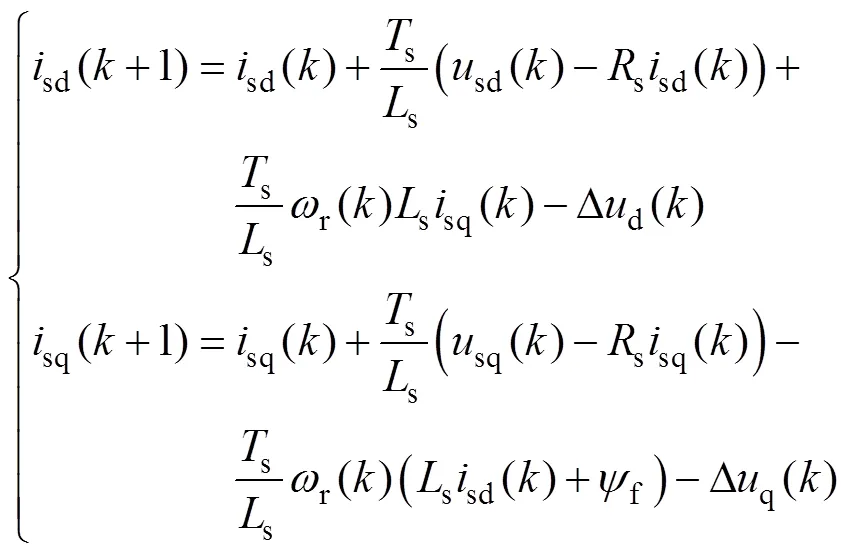

圖3 定子電流觀測器
+1時刻的轉(zhuǎn)子位置角可根據(jù)其與轉(zhuǎn)子電角速度之間的關(guān)系求得,有

經(jīng)坐標變換將dq中+1時刻電流轉(zhuǎn)換到ab中,有

2.3 定子磁鏈和轉(zhuǎn)矩觀測
定子磁鏈估計采用電壓模型和電流模型兩者相結(jié)合的觀測器。采用式(2)表示的電流模型計算時刻的定子磁鏈為

由于零矢量對磁鏈幾乎沒有影響,結(jié)合式(1)的電壓模型,+1時刻的定子磁鏈可表示為
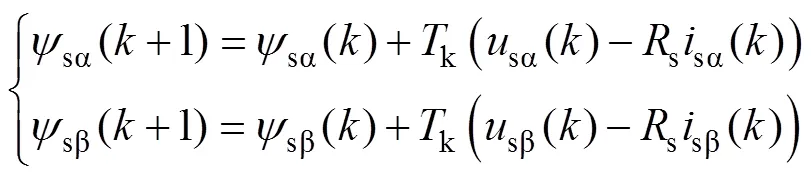
由此,可得+1時刻的電磁轉(zhuǎn)矩為

2.4 3次諧波抑制
五相PMSM運行時,根據(jù)電壓源逆變器中功率器件的開關(guān)狀態(tài),可獲得如圖4所示的30個非零矢量和2個零矢量,其中非零矢量根據(jù)幅值不同分為大、中、小矢量,其幅值分別為0.647 2dc、0.4dc、0.247 2dc。其中,dc為直流母線電壓[20-22]。

圖4 五相PMSM空間電壓矢量
為抑制3次諧波電流,在基波空間中每個扇區(qū)內(nèi)選取2個大矢量和中矢量合成參考電壓矢量。根據(jù)空間電壓矢量分布特點,在基波空間中當同相位的大矢量作用時間為中矢量作用時間的1.618倍時,對應(yīng)3次諧波空間內(nèi)合成電壓矢量為零。由此,在ab空間合成的電壓矢量幅值最大為

以第一扇區(qū)為例,選取非零矢量25、16、24、29和零矢量0參與矢量合成。根據(jù)伏秒平衡原理,如圖5所示合成參考電壓矢量為

其中

式中,ref1為基波空間中參考電壓矢量;25、16、24、29、0分別為一個PWM周期內(nèi)上述各電壓矢量的作用時間。
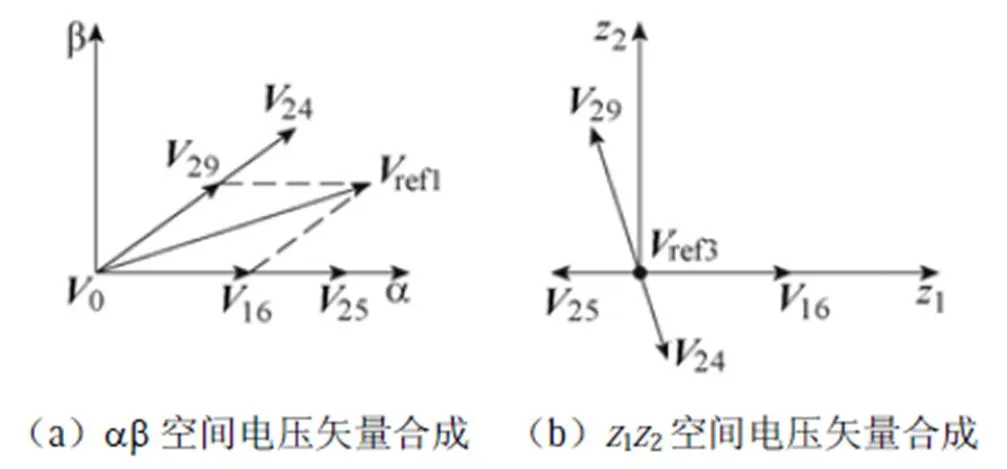
圖5 第一扇區(qū)相鄰4個非零電壓矢量合成
根據(jù)上述分析,提出用于五相PMSM驅(qū)動系統(tǒng)的改進型DB-DTFC策略,該系統(tǒng)控制框圖如圖6所示。
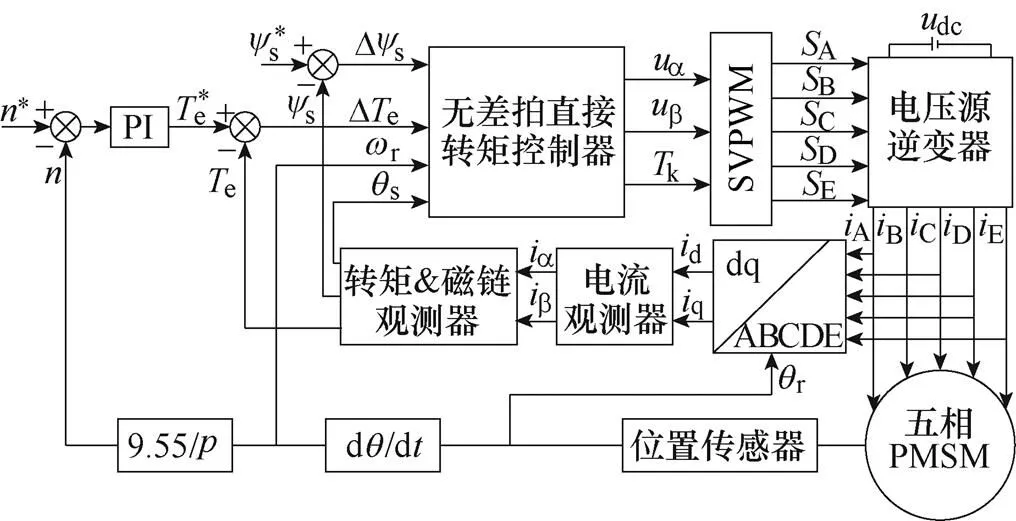
圖6 改進型DB-DTFC控制框圖
3 實驗驗證
搭建如圖7所示的實驗平臺,驗證本文所提出的改進型DB-DTFC策略的可行性,并與文獻[13]中傳統(tǒng)DB-DTFC策略進行對比。五相PMSM參數(shù)見表1。控制器以TMS320F2812芯片和PM100CVA120功率模塊為核心,轉(zhuǎn)矩傳感器型號為YH502,永磁直流電機連接功率電阻作為負載。
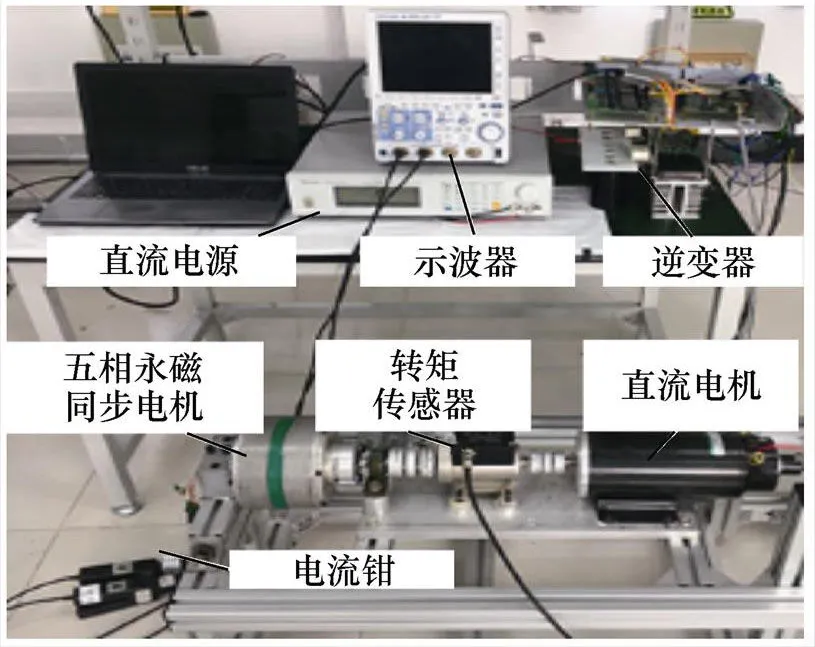
圖7 實驗平臺
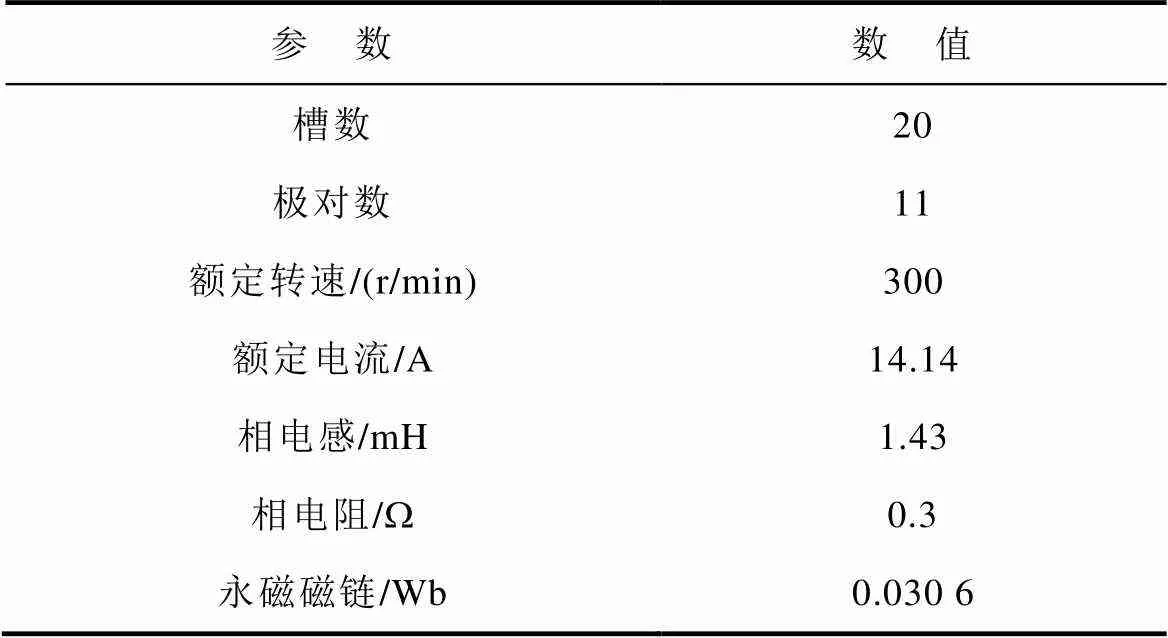
表1 電機參數(shù)
為了保證對比實驗的公平性和合理性,傳統(tǒng)DB-DTFC策略和所提出的改進型DB-DTFC策略都采用本文所設(shè)計的基于相鄰4個非零電壓矢量的SVPWM技術(shù)。電機轉(zhuǎn)速設(shè)置為300 r/min,負載轉(zhuǎn)矩給定為4 N·m。電機穩(wěn)態(tài)實驗波形及定子磁鏈矢量在ab平面的軌跡分別如圖8、圖9所示。可見,傳統(tǒng)DB-DTFC和改進型DB-DTFC的轉(zhuǎn)矩脈動分別為11.1%和7.8%。在兩種策略控制下,均能較好地控制定子磁鏈,其在ab平面上的軌跡接近圓形。傳統(tǒng)DB-DTFC的相電流波形一定程度上發(fā)生了畸變,而改進型DB-DTFC的相電流波形較為光滑。因此,所提出的改進型DB-DTFC策略能在保持磁鏈控制精度的基礎(chǔ)上更好地抑制轉(zhuǎn)矩脈動。圖10為兩種策略控制下A相電流的快速傅里葉變換(Fast Fourier Transformation, FFT)。可見,傳統(tǒng)DB-DTFC和改進型DB-DTFC下的A相電流總諧波畸變率(Total Harmonic Distortion, THD)分別為10.48%和5.46%。因此,改進型DB-DTFC具有更好的電流諧波抑制能力。主要原因是改進型DB-DTFC策略所求解電壓矢量更符合無差拍控制目標,對定子磁鏈和轉(zhuǎn)矩控制精度較高,因此電流諧波較小。圖11為兩種策略控制下基波空間和3次諧波空間的電流波形。可見,相比傳統(tǒng)DB-DTFC策略,改進型DB-DTFC策略的基波空間電流波形呈現(xiàn)較好的正弦度,且3次諧波空間中的電流幾乎被抑制為零。兩種控制策略的穩(wěn)態(tài)性能對比見表2。可見,相比傳統(tǒng)DB-DTFC策略,所提出的改進型DB-DTFC策略不但減少了計算量,而且能更好地抑制轉(zhuǎn)矩和磁鏈脈動,降低相電流諧波,具有更好的穩(wěn)態(tài)性能。
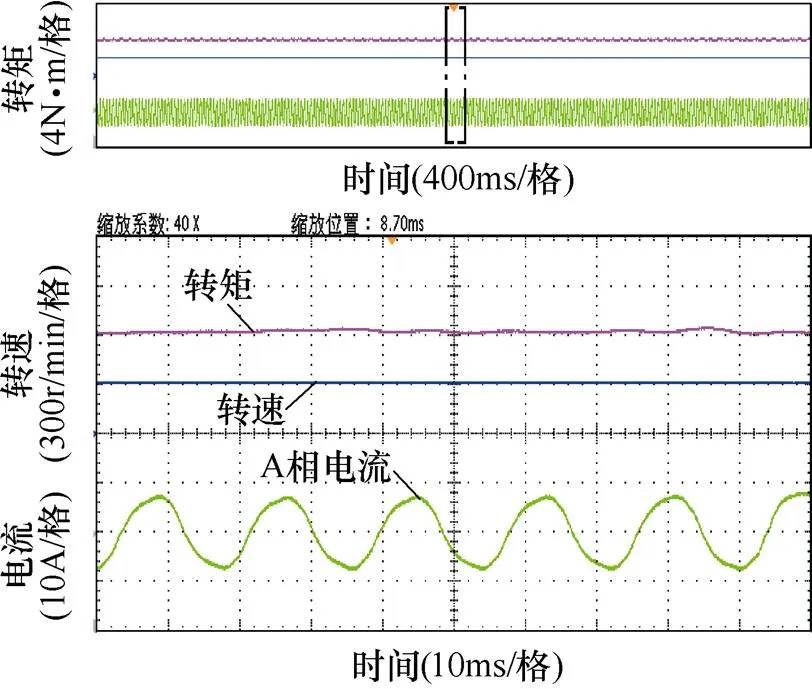
(a)傳統(tǒng)DB-DTFC

(b)改進型DB-DTFC
圖8 穩(wěn)態(tài)實驗結(jié)果對比
Fig.8 Comparison of steady-state experimental results

(a)傳統(tǒng)DB-DTFC (b)改進型DB-DTFC
圖9 定子磁鏈矢量在ab平面上的軌跡對比
Fig.9 Trajectory comparison of stator flux vector inabsubspace

圖10 A相電流FFT對比分析
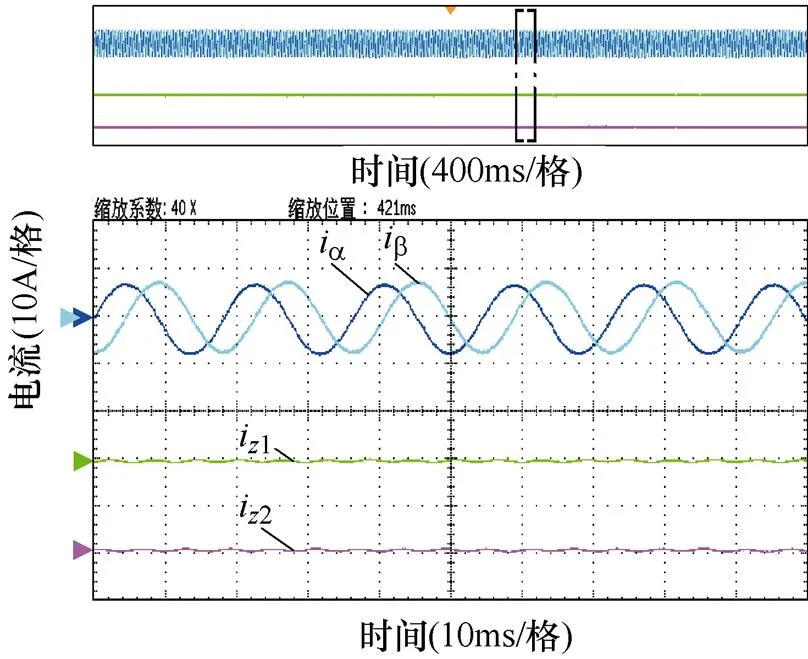
(a)傳統(tǒng)DB-DTFC
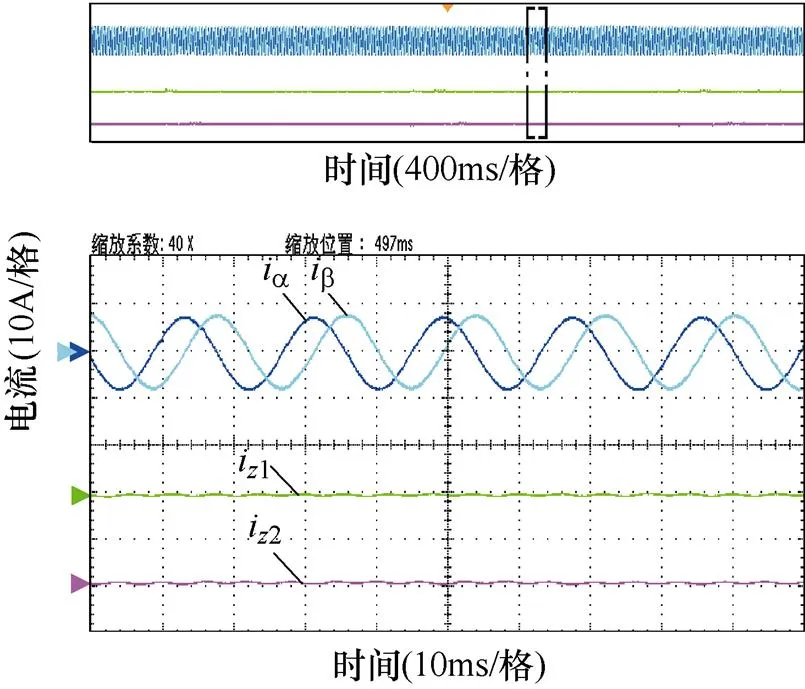
(b)改進型DB-DTFC
圖11ab和12坐標系下的電流波形
Fig.11 Current waveforms inaband12subspaces

表2 穩(wěn)態(tài)性能對比
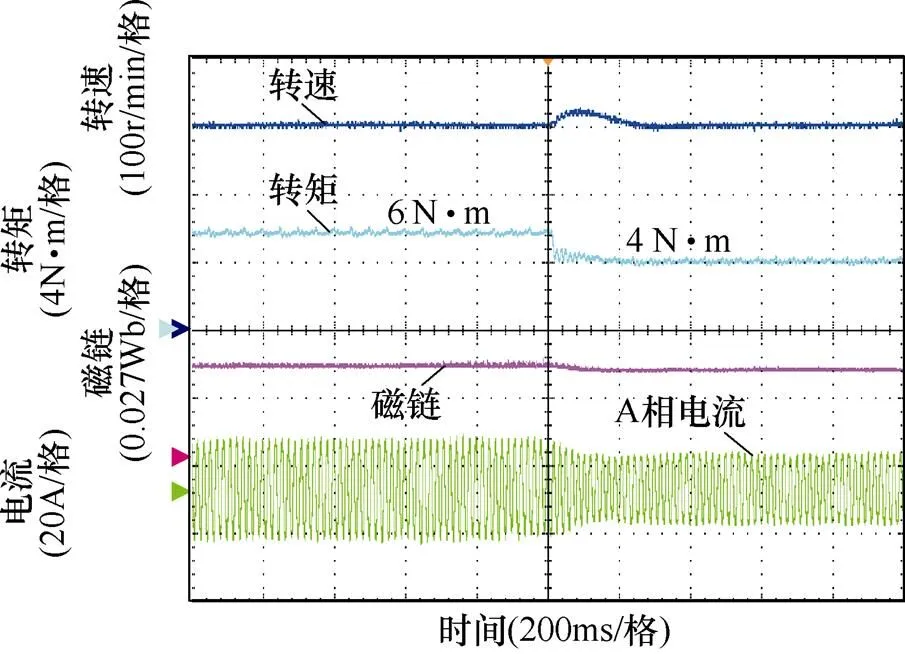
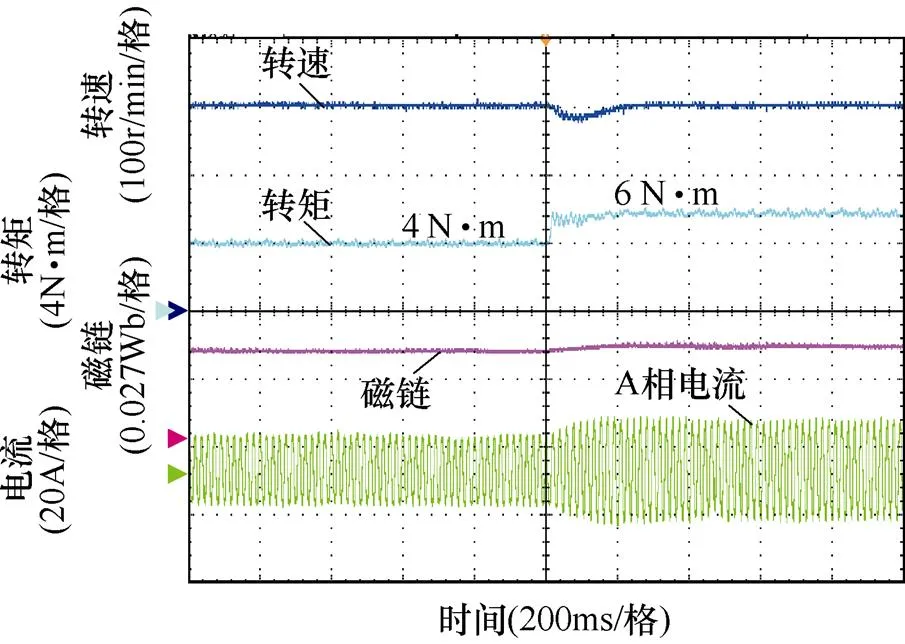
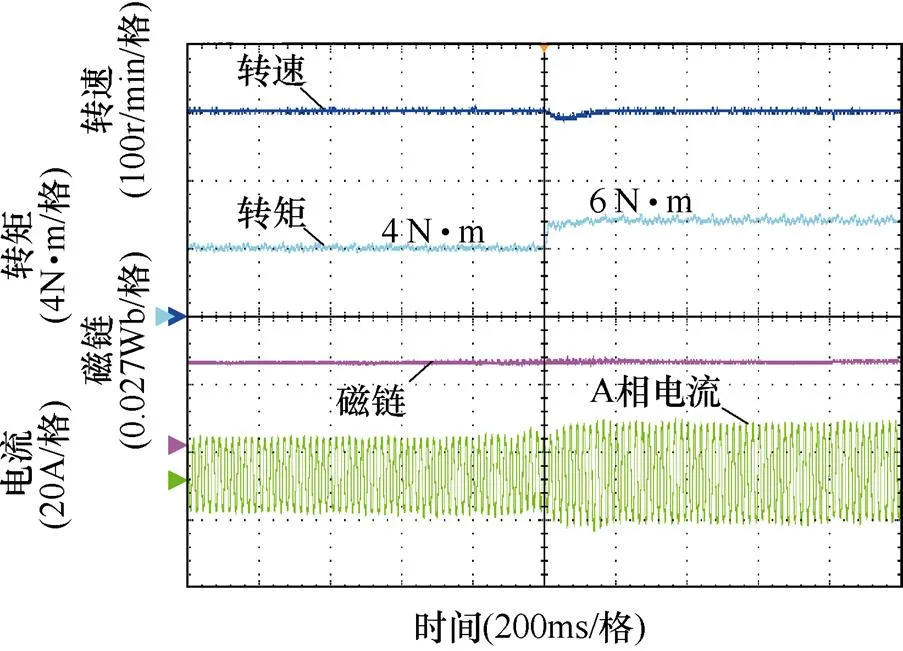
為了進一步驗證在改進型DB-DTFC策略下PMSM的動態(tài)性能,電機進行了負載階躍和轉(zhuǎn)速階躍實驗。電機參考轉(zhuǎn)速為300 r/min,負載轉(zhuǎn)矩在4 N·m和6 N·m之間發(fā)生階躍。圖12、圖13分別為傳統(tǒng)DB-DTFC和改進型DB-DTFC轉(zhuǎn)速、轉(zhuǎn)矩、磁鏈和電流的動態(tài)響應(yīng)波形。負載階躍變化時的響應(yīng)時間和最大轉(zhuǎn)速波動見表3。可見,在兩種策略控制下電機均能在較短時間內(nèi)對負載變化做出響應(yīng),且改進型DB-DTFC響應(yīng)更迅速。傳統(tǒng)DB-DTFC由于磁鏈和轉(zhuǎn)矩存在耦合,在負載階躍變化過程中,轉(zhuǎn)速產(chǎn)生較大波動、調(diào)節(jié)時間較長,且轉(zhuǎn)矩在此過程出現(xiàn)振蕩,定子磁鏈誤差增大,極大地影響了轉(zhuǎn)矩變化后的穩(wěn)態(tài)性能。相比之下,由于改進型DB- DTFC實現(xiàn)了轉(zhuǎn)矩和磁鏈的解耦,在負載變化過程中,轉(zhuǎn)速波動較小,調(diào)節(jié)時間較短,且轉(zhuǎn)矩響應(yīng)更為平穩(wěn)、迅速,磁鏈幅值在此過程中基本保持不變,控制精度不因負載變化而降低。
(a)負載向下階躍
(b)負載向上階躍
圖12 傳統(tǒng)DB-DTFC負載階躍實驗結(jié)果
Fig.12 Experimental results of traditional DB-DTFC when load step changes
圖14、圖15分別為電機參考轉(zhuǎn)速在200 r/min和300 r/min之間階躍時,傳統(tǒng)DB-DTFC和改進型DB-DTFC轉(zhuǎn)矩、轉(zhuǎn)速和電流的動態(tài)響應(yīng)波形。可見,當參考轉(zhuǎn)速向下和向上階躍時,若采用傳統(tǒng)DB- DTFC策略,電機轉(zhuǎn)速響應(yīng)時間分別為182 ms和195 ms;當采用改進型DB-DTFC時,電機轉(zhuǎn)速響應(yīng)時間分別為162 ms和165 ms。因此,所提出的改進型DB-DTFC策略對于轉(zhuǎn)速變化的響應(yīng)更為迅速。
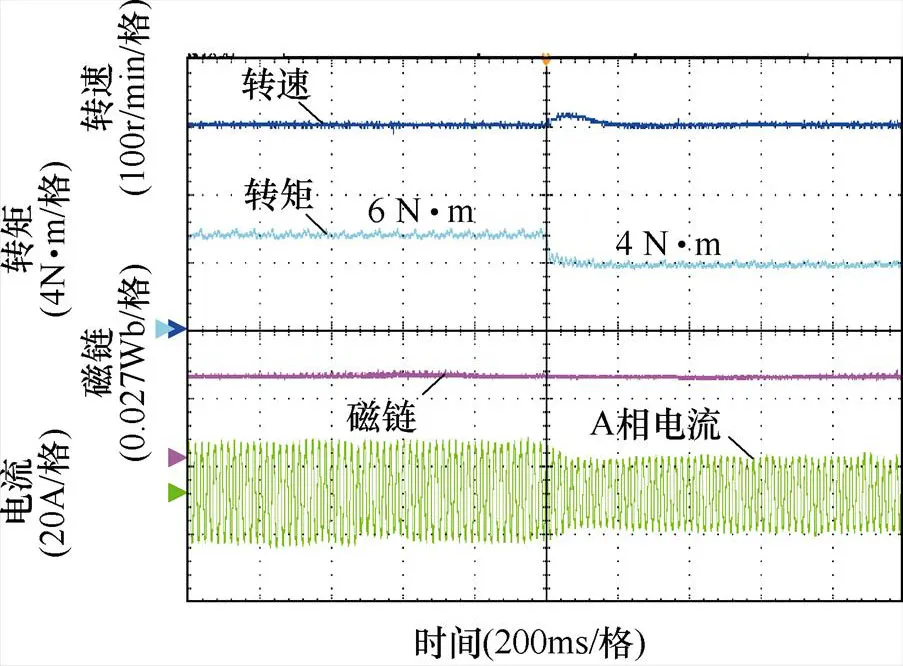
(a)負載向下階躍
(b)負載向上階躍
圖13 改進型DB-DTFC負載階躍實驗結(jié)果
Fig.13 Experimental results of improved DB-DTFC when load step changes
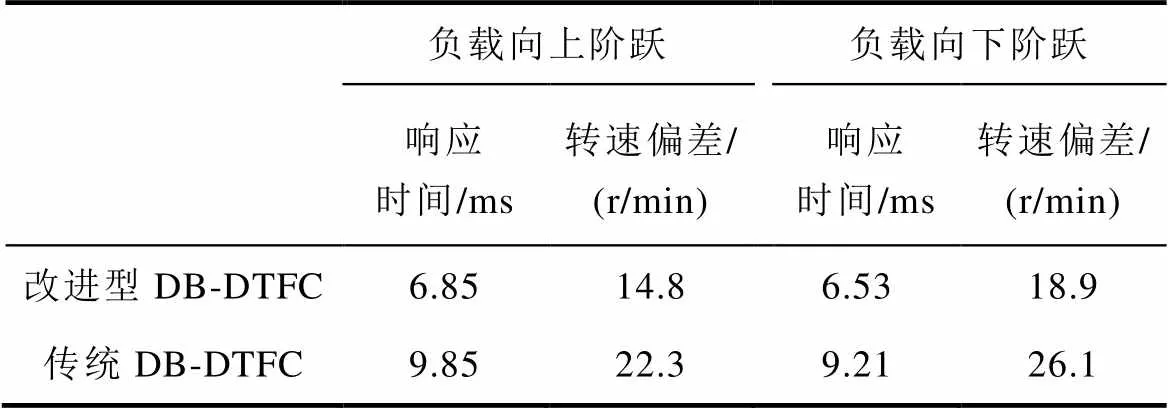
表3 動態(tài)性能對比

(a)轉(zhuǎn)速向下階躍

(b)轉(zhuǎn)速向上階躍
圖14 傳統(tǒng)DB-DTFC轉(zhuǎn)速階躍實驗結(jié)果
Fig.14 Experimental results of traditional DB-DTFC when speed step changes
(a)轉(zhuǎn)速向下階躍

(b)轉(zhuǎn)速向上階躍
圖15 改進型DB-DTFC轉(zhuǎn)速階躍實驗結(jié)果
Fig.15 Experimental results of improved DB-DTFC when speed step changes
通過上述對比實驗,相較于傳統(tǒng)DB-DTFC,改進型DB-DTFC在穩(wěn)態(tài)時可更好地控制轉(zhuǎn)矩、磁鏈和電流,減小穩(wěn)態(tài)誤差;在動態(tài)過程中,實現(xiàn)了轉(zhuǎn)矩和磁鏈的解耦控制,對電機運行狀態(tài)變化具備更好的跟蹤性能,對負載擾動和參數(shù)擾動具有更快的響應(yīng)速度,提高了系統(tǒng)穩(wěn)定性。綜上所述,本文所提出改進型DB-DTFC策略具有更為優(yōu)越的動態(tài)性能。
4 結(jié)論
本文針對五相PMSM提出一種改進型DB- DTFC策略。所提策略具有如下優(yōu)點:
1)相較于傳統(tǒng)DB-DTFC策略,該策略定子電壓求解更為簡單,降低了CPU計算負擔。
2)該策略建立的轉(zhuǎn)矩和磁鏈控制模型更為精確,實現(xiàn)了轉(zhuǎn)矩和磁鏈的解耦控制,在穩(wěn)態(tài)時產(chǎn)生更小的轉(zhuǎn)矩和磁鏈脈動,提高了控制精度,改善了系統(tǒng)的穩(wěn)態(tài)和動態(tài)性能。
3)設(shè)計觀測器解決數(shù)字控制的延時問題,且一定程度上提升了系統(tǒng)的參數(shù)魯棒性。
4)采用基于相鄰4個非零電壓矢量的SVPWM有效抑制了3次諧波電流,降低了相電流的畸變率。
[1] Zhou Huawei, Xu Jinhui, Chen Cheng, et al. Disturbance-observer-based direct torque control of five-phase permanent magnet motor under open- circuit and short-circuit faults[J]. IEEE Transactions on Industrial Electronics, 2021, 68(12): 11907-11917.
[2] 王震宇, 孫偉, 蔣棟. 基于虛擬電壓注入的閉環(huán)磁鏈觀測器的感應(yīng)電機無速度傳感器矢量控制系統(tǒng)[J]. 電工技術(shù)學報, 2022, 37(2): 332-343.
Wang Zhenyu, Sun Wei, Jiang Dong. Induction motor speed sensorless vector control system based on closed-loop flux observer with virtual voltage injection[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 332-343.
[3] 李修東, 鄭曉欽, 王海峰, 等. 最大轉(zhuǎn)矩范圍內(nèi)九相永磁同步電機缺相容錯運行銅耗優(yōu)化策略[J]. 電工技術(shù)學報, 2022, 37(17): 4355-4363.
Li Xiudong, Zheng Xiaoqin, Wang Haifeng, et al. Copper consumption optimization strategy of nine- phase permanent magnet synchronous motor under fault-tolerant operation in the maximum torque range[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4355-4363.
[4] 高宏偉, 楊貴杰, 劉劍. 3次諧波注入式五相永磁同步電機矢量控制策略[J]. 中國電機工程學報, 2014, 34(24): 4101-4108.
Gao Hongwei, Yang Guijie, Liu Jian. A vector control strategy for five-phase PMSM with third harmonic injection[J]. Proceedings of the CSEE, 2014, 34(24): 4101-4108.
[5] Li Jianhua, Du Bochao, Zhao Tianxu, et al. Current sensor fault-tolerant control for five-phase PMSM drives based on third-harmonic space[J]. IEEE Transactions on Industrial Electronics, 2022, 69(10): 9827-9837.
[6] 黃林森, 趙文祥, 吉敬華, 等. 穩(wěn)態(tài)性能改善的雙三相永磁電機直接轉(zhuǎn)矩控制[J]. 電工技術(shù)學報, 2022, 37(2): 355-367.
Huang Linsen, Zhao Wenxiang, Ji Jinghua, et al. Direct torque control for dual three-phase permanent- magnet machine with improved steady-state perfor- mance[J]. Transactions of China Electrotechnical Society, 2022, 37(2): 355-367.
[7] 陳浩, 和陽, 趙文祥, 等. 基于占空比調(diào)制的五相容錯永磁游標電機直接轉(zhuǎn)矩控制[J]. 電工技術(shù)學報, 2020, 35(5): 1055-1064.
Chen Hao, He Yang, Zhao Wenxiang, et al. Direct torque control of five-phase fault-tolerant permanent magnet vernier motor based on duty cycle modu- lation[J]. Transactions of China Electrotechnical Society, 2020, 35(5): 1055-1064.
[8] Choi Y S, Choi H H, Jung J W. Feedback lineari- zation direct torque control with reduced torque and flux ripples for IPMSM drives[J]. IEEE Transactions on Power Electronics, 2016, 31(5): 3728-3737.
[9] 李祥林, 薛志偉, 閻學雨, 等. 基于電壓矢量快速篩選的永磁同步電機三矢量模型預測轉(zhuǎn)矩控制[J]. 電工技術(shù)學報, 2022, 37(7): 1666-1678.
Li Xianglin, Xue Zhiwei, Yan Xueyu, et al. Voltage vector rapid screening-based three-vector model predictive torque control for permanent magnet synchronous motor[J]. Transactions of China Elec- trotechnical Society, 2022, 37(7): 1666-1678.
[10] 趙勇, 黃文新, 林曉剛, 等. 基于權(quán)重系數(shù)消除和有限控制集優(yōu)化的雙三相永磁容錯電機快速預測直接轉(zhuǎn)矩控制[J]. 電工技術(shù)學報, 2021, 36(1): 3-14.
Zhao Yong, Huang Wenxin, Lin Xiaogang, et al. Fast predictive direct torque control of dual three-phase permanent magnet fault tolerant machine based on weighting factor elimination and finite control set optimization[J]. Transactions of China Electro- technical Society, 2021, 36(1): 3-14.
[11] Huang Wentao, Hua Wei, Fan Qigao. Performance analysis and comparison of two fault-tolerant model predictive control methods for five-phase PMSM drives[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(4): 311-320.
[12] Wang Wusen, Liu Chunhua, Zhao Hang, et al. Improved deadbeat-direct torque and flux control for PMSM with less computation and enhanced robustness[J]. IEEE Transactions on Industrial Electronics, 2023, 70(3): 2254-2263.
[13] Lee J S, Choi C H, Seok J K, et al. Deadbeat-direct torque and flux control of interior permanent magnet synchronous machines with discrete time stator current and stator flux linkage observer[J]. IEEE Transactions on Industry Applications, 2011, 47(4): 1749-1758.
[14] Lee J S, Lorenz R D. Deadbeat-direct torque and flux control of IPMSM drives using a minimum time ramp trajectory method at voltage and current limits[C]// 2013 IEEE Energy Conversion Congress and Expo- sition, Denver, CO, USA, 2013: 1778-1785.
[15] Lin Xiaogang, Huang Wenxin, Jiang Wen, et al. Deadbeat direct torque and flux control for permanent magnet synchronous motor based on stator flux oriented[J]. IEEE Transactions on Power Electronics, 2020, 35(5): 5078-5092.
[16] 劉國海, 劉凱旋, 周華偉, 等. 基于定子磁鏈定向的五相PMSM新型無差拍直接轉(zhuǎn)矩和磁鏈控制[J]. 中國電機工程學報, 2022, 42(16): 6073-6082, 6181.
Liu Guohai, Liu Kaixuan, Zhou Huawei, et al. Novel deadbeat direct torque and flux control of five-phase PMSM based on stator flux orientation[J]. Pro- ceedings of the CSEE, 2022, 42(16): 6073-6082, 6181.
[17] 秦艷忠, 閻彥, 陳煒, 等. 永磁同步電機參數(shù)誤差補償-三矢量模型預測電流控制[J]. 電工技術(shù)學報, 2020, 35(2): 255-265.
Qin Yanzhong, Yan Yan, Chen Wei, et al. Three- vector model predictive current control strategy for permanent magnet synchronous motor drives with parameter error compensation[J]. Transactions of China Electrotechnical Society, 2020, 35(2): 255-265.
[18] 章回炫, 范濤, 邊元均, 等. 永磁同步電機高性能電流預測控制[J]. 電工技術(shù)學報, 2022, 37(17): 4335-4345.
Zhang Huixuan, Fan Tao, Bian Yuanjun, et al. Predictive current control strategy of permanent magnet synchronous motors with high performance[J]. Transactions of China Electrotechnical Society, 2022, 37(17): 4335-4345.
[19] Zuo Yuefei, Mei Jie, Jiang Chaoqiang, et al. Digital implementation of deadbeat-direct torque and flux control for permanent magnet synchronous machines in the M-T reference frame[J]. IEEE Transactions on Power Electronics, 2021, 36(4): 4610-4621.
[20] 薛誠, 宋文勝, 馮曉云. 五相永磁同步電機多目標優(yōu)化直接轉(zhuǎn)矩控制算法[J]. 中國電機工程學報, 2016, 36(6): 1695-1704.
Xue Cheng, Song Wensheng, Feng Xiaoyun. A direct torque control algorithm of five-phase permanent- magnet machines with multi-objective optimization[J]. Proceedings of the CSEE, 2016, 36(6): 1695-1704.
[21] Suhel S M, Maurya R. A new switching sequences of SVPWM for six-phase induction motor with features of reduced switching losses[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(2): 100- 107.
[22] 朱琳, 卜飛飛, 黃文新, 等. 五相逆變器非正弦雙隨機空間矢量脈寬調(diào)制策略[J]. 電工技術(shù)學報, 2018, 33(20): 4824-4833.
Zhu Lin, Bu Feifei, Huang Wenxin, et al. Non- sinusoidal dual random space vector pulse width modulation strategy for five-phase inverter[J]. Transactions of China Electrotechnical Society, 2018, 33(20): 4824-4833.
An Improved Deadbeat Direct Torque and Flux Control Strategy of Five-Phase Permanent Magnet Synchronous Motor
(School of Electrical and Information Engineering Jiangsu University Zhenjiang 212013 China)
With the advantages of higher bus voltage utilization and more degrees of control freedom, multiphase permanent magnet synchronous motors (PMSMs) are widely used in electric vehicles, ship propulsion, and other fields. Direct torque control (DTC) and vector control (VC) are the most popular methods. Compared with VC, DTC needs two hysteresis comparators of stator flux linkage and torque and a switching table, which has a simple structure and fast dynamic response. However, traditional DTC has the disadvantages of large torque, flux linkage ripples, and high current harmonics. Model predictive torque control (MPTC) selects the optimal voltage vector from a control set according to the cost function to improve the torque and flux dynamic response. It has heavy computational burden and difficulty in tuning the weighting factor. Deadbeat direct torque and flux control (DB-DTFC) can eliminate the errors of torque and flux linkage within one sampling period by a voltage vector, which is obtained by discretizing the mathematical model. In addition, its control structure is simple, and it is unnecessary to adjust redundant parameters. However, there is a coupled relationship between torque and stator flux linkage. The traditional DB-DTFC has poor dynamic and steady-state performance. Therefore, an improved DB-DTFC strategy is proposed for five-phase PMSM.
Firstly, the PMSM model is discretized in the two-stationary frame, and a voltage vector is obtained from the relationship among stator voltage, torque, and stator flux linkage. Thus, the decoupling control of torque and stator flux linkage can be achieved. Secondly, current and flux linkage observers are built to compensate for delay and parameter disturbance in the digital control system. Finally, due to harmonic space in the five-phase PMSM, the space vector pulse width modulation (SVPWM) based on four non-zero vectors is designed to restrain the third harmonic current.
Experimental results of the traditional and improved DB-DTFC were tested at rated speed to evaluate the steady-state performance. Compared with the traditional DB-DTFC, the improved DB-DTFC can better suppress the torque and flux linkage ripples, the waveform of phase current is more sinusoidal, and the CPU execution time is shorter. Therefore, the voltage vector obtained by the improved DB-DTFC is more consistent with the deadbeat control goal, improving the stator flux and torque control accuracy and restraining current harmonics. Moreover, during dynamic experiments, the improved DB-DTFC has faster torque and speed responses, shorter adjustment time, and more dynamic response than the traditional DB-DTFC, ensuring the control accuracy of flux linkage.
The effectiveness of the proposed strategy is verified through theoretical analysis and experiments, and the following conclusions can be drawn. (1) Compared with the traditional DB-DTFC, the stator voltage of the method is much easier to obtain, thus requiring less computation. (2) The model of torque and flux linkage is accurate to achieve the decoupling control. The ripples are less at steady-state operation, thus improving the steady-state and dynamic performance. (3) Current and flux linkage observers are designed to eliminate the delay of digital control and to improve the parameter robustness. (4) SVPWM based on four non-zero vectors can effectively restrain the third harmonic current and reduce the distortion of phase current.
Deadbeat control, direct torque and flux control (DTFC), permanent magnet synchronous motor (PMSM), delay compensation, space vector pulse width modulation (SVPWM)
TM351
10.19595/j.cnki.1000-6753.tces.221730
國家自然科學基金(52277052)和江蘇高校“青藍工程”資助項目。
2022-09-13
2022-11-09
劉國海 男,1964年生,教授,博士生導師,研究方向為電機控制、復雜系統(tǒng)控制及非線性智能控制等。E-mail: ghliu@ujs.edu.cn
周華偉 男,1980年生,教授,博士生導師,研究方向為電動汽車和電磁懸架用特種永磁電機驅(qū)動控制、容錯控制等。E-mail: zhouhuawei@ujs.edu.cn(通信作者)
(編輯 崔文靜)
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:42
中學生數(shù)理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
小學生作文(低年級適用)(2018年9期)2018-10-08 02:29:48
中學生數(shù)理化·七年級數(shù)學人教版(2018年6期)2018-06-26 08:36:10
數(shù)學大世界(2018年1期)2018-04-12 05:39:14
幸福(2017年18期)2018-01-03 06:34:53
中國衛(wèi)生(2016年8期)2016-11-12 13:26:50