基于元學(xué)習(xí)技術(shù)的變工況齒輪故障診斷方法*
2023-11-27 02:12:10鄭成基胡國(guó)賓范青榮朱小紅
機(jī)電工程 2023年11期
郭 敏,周 超,鄭成基,陳 鵬,胡國(guó)賓,范青榮*,朱小紅
(1.武漢理工大學(xué) 機(jī)電工程學(xué)院,湖北 武漢 430070;2.中國(guó)輕工業(yè)長(zhǎng)沙工程有限公司,湖南 長(zhǎng)沙 410114)
0 引 言
齒輪是機(jī)械設(shè)備中應(yīng)用比較廣泛的傳動(dòng)部件之一,其健康狀態(tài)的好壞關(guān)系到設(shè)備能否高效穩(wěn)定地工作,因此,對(duì)齒輪進(jìn)行故障診斷具有重要的意義。
隨著智能故障診斷技術(shù)的發(fā)展,許多基于傳統(tǒng)機(jī)器學(xué)習(xí)(machine learning,ML)和深度學(xué)習(xí)(deep learn-ing,DL)的技術(shù)被應(yīng)用到了齒輪故障診斷中[1-2]。其中,基于深度學(xué)習(xí)的故障診斷方法是否成功在很大程度上取決于2個(gè)條件:1)足夠數(shù)量的訓(xùn)練樣本;2)訓(xùn)練集與測(cè)試集遵循相同的數(shù)據(jù)分布和故障類別[3]。
在實(shí)際工程中,由于齒輪運(yùn)行工況的多變,采集的故障數(shù)據(jù)存在分布性差異大和數(shù)據(jù)非均衡性等問(wèn)題,用一個(gè)原本診斷精度良好的故障診斷模型去診斷另一工況下的故障,其診斷精度將大幅下降。因此,在運(yùn)行工況多變的情況下,如何能夠訓(xùn)練出一個(gè)診斷精度良好的故障診斷模型仍是當(dāng)今的相關(guān)研究熱點(diǎn)之一。
隨著計(jì)算機(jī)技術(shù)的高速發(fā)展,越來(lái)越多的學(xué)者將深度學(xué)習(xí)技術(shù)運(yùn)用于機(jī)械產(chǎn)品的故障診斷中。深度學(xué)習(xí)模型對(duì)數(shù)據(jù)特征比較敏感,其能夠提取原始數(shù)據(jù)中更深層次的特征。元學(xué)習(xí)(meta-learning)[4]作為深度學(xué)習(xí)中一個(gè)前沿的技術(shù),其具體思想是從大量的先驗(yàn)任務(wù)中學(xué)習(xí)到元知識(shí),利用以往的先驗(yàn)知識(shí),指導(dǎo)模型更快地學(xué)習(xí)(在新的任務(wù)中);因此,可以將元學(xué)習(xí)技術(shù)用于變工況齒輪故障診斷中。
目前,元學(xué)習(xí)的研究方向主要有基于優(yōu)化、基于度量和基于模型[5]這3類。在已有的基于元學(xué)習(xí)的故障診斷方法中,ZHANG Shen等人[6]提出了一種基于模型不可知元學(xué)習(xí)(model agnostic meta learning,MAML)的軸承故障診斷方法,其目的是利用有限的故障數(shù)據(jù),訓(xùn)練出良好的故障分類器。
基于模型的元學(xué)習(xí)的基本思想是尋找最優(yōu)初始超參數(shù),在初始超參數(shù)良好的情況下,模型能以較少步驟的梯度快速地學(xué)習(xí)新任務(wù)。然而,最優(yōu)初始超參數(shù)的尋找是困難的,模型參數(shù)設(shè)置不當(dāng)不僅會(huì)影響MAML的收斂速度[7],而且對(duì)于特定任務(wù)的調(diào)整參數(shù)通常還會(huì)費(fèi)時(shí)費(fèi)力,且計(jì)算成本較大。此外,WANG Si-han等人[8-9]分別提出了基于度量元學(xué)習(xí)的增強(qiáng)關(guān)系網(wǎng)絡(luò),以及基于特征空間度量的元學(xué)習(xí)模型,并將其用于軸承的故障診斷。
采用上述方法雖能在故障診斷中獲得較高的診斷精度,但由于故障振動(dòng)信號(hào)頻率成分復(fù)雜且多樣,在運(yùn)行工況變化較大的情況下,這些模型不能很好地提取到更深層次的故障特征,并將其聯(lián)系起來(lái),容易忽略掉故障信號(hào)之間的相關(guān)性。
筆者基于元學(xué)習(xí)技術(shù)中的原型網(wǎng)絡(luò),構(gòu)建一種故障診斷模型,以期實(shí)現(xiàn)變工況下的齒輪故障診斷目的。
首先,筆者對(duì)原始齒輪故障信號(hào)進(jìn)行重采樣,以增加故障樣本的數(shù)量,并對(duì)其進(jìn)行短時(shí)傅里葉變換,將其轉(zhuǎn)化成更符合模型輸入的二維時(shí)頻特征圖;然后,基于元學(xué)習(xí)技術(shù)中的原型網(wǎng)絡(luò)[10],將初始模塊(Inception模塊)[11]引入到模型的特征提取模塊中,以增加特征提取網(wǎng)絡(luò)的寬度,獲得多通道信息交互的特征數(shù)據(jù),提高其特征的提取能力(便于后續(xù)網(wǎng)絡(luò)生成更準(zhǔn)確的故障類原型);最后,采用度量分類器,在變工況條件下進(jìn)行齒輪的故障診斷。
1 理論基礎(chǔ)
1.1 元學(xué)習(xí)
元學(xué)習(xí)即學(xué)會(huì)學(xué)習(xí),是利用之前學(xué)習(xí)過(guò)的知識(shí)或經(jīng)驗(yàn),在學(xué)習(xí)新任務(wù)時(shí)使模型能快速適應(yīng)。且其模型所需訓(xùn)練樣本較少,一般用于提高模型的泛化能力,將模型更好地泛化到差別較大的任務(wù)中。
元學(xué)習(xí)的訓(xùn)練機(jī)制為階段式訓(xùn)練機(jī)制[12],即模型訓(xùn)練時(shí)有很多個(gè)不同的任務(wù)(task),每個(gè)task中都包含一個(gè)用于獲取特定知識(shí)并提供反饋的支持集(support set)和一個(gè)用于評(píng)估模型泛化性能的查詢集(query set),task中的支持集和查詢集隨機(jī)從數(shù)據(jù)集中抽取。
在進(jìn)行訓(xùn)練時(shí),元學(xué)習(xí)需要保證訓(xùn)練集、驗(yàn)證集和測(cè)試集中的數(shù)據(jù)類別完全不同,但是每個(gè)task下的支持集和查詢集中的數(shù)據(jù)類別要保持一致。模型經(jīng)過(guò)多個(gè)task訓(xùn)練后,將學(xué)會(huì)從較小且數(shù)據(jù)分布差異較大的數(shù)據(jù)集上學(xué)習(xí)。
上述數(shù)據(jù)集的劃分通常用N-way K-shot表示,即task中的支持集和查詢集都采用N-way K-shot的方法進(jìn)行設(shè)置。每個(gè)task中的支持集和查詢集都有N個(gè)不同類別的數(shù)據(jù),每個(gè)類別中有K個(gè)數(shù)據(jù)樣本。據(jù)文獻(xiàn)[12]1-7可知,當(dāng)模型在訓(xùn)練和測(cè)試時(shí),采用相同數(shù)量的way和shot可以獲得更好的效果。
元學(xué)習(xí)訓(xùn)練集劃分的詳細(xì)規(guī)則如圖1所示。
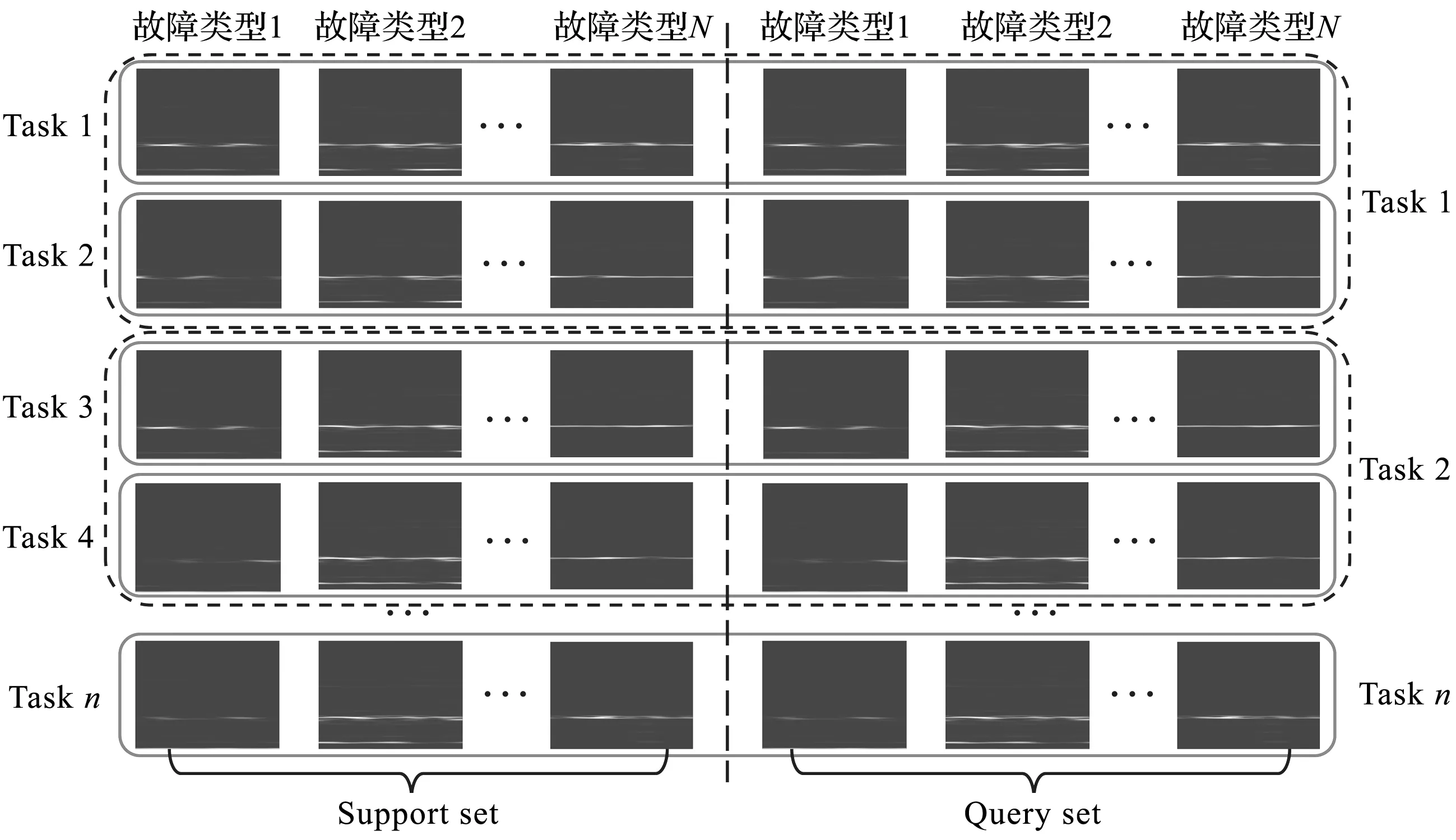
圖1 數(shù)據(jù)集的劃分
同理,驗(yàn)證集和測(cè)試集也采用相同的劃分規(guī)則。
圖1中,數(shù)據(jù)集分為支持集和查詢集,每個(gè)數(shù)據(jù)集分為n個(gè)Task,每個(gè)任務(wù)包含N類故障類型,每類故障的支持集和查詢集各有K個(gè)樣本。其中,實(shí)線部分為N-way 1-shot,即支持集和查詢集中含有相同的N個(gè)故障類型,且每類故障含有有1個(gè)樣本;黑色虛線所框起來(lái)的部分為N-way 2-shot。
當(dāng)每類故障樣本為K時(shí),即N-wayK-shot。
1.2 原型網(wǎng)絡(luò)
原型網(wǎng)絡(luò)[10]1-12(PN)是一種簡(jiǎn)單、高效的小樣本學(xué)習(xí)方法,其基本思想是創(chuàng)建各類的類原型表示,并根據(jù)類原型與查詢點(diǎn)(新點(diǎn))之間的距離,對(duì)查詢點(diǎn)進(jìn)行分類。因此,故障分類問(wèn)題就轉(zhuǎn)化為特征空間中最近鄰問(wèn)題。
筆者采用歐式距離進(jìn)行相似性度量。
原型網(wǎng)絡(luò)示意圖如圖2所示。
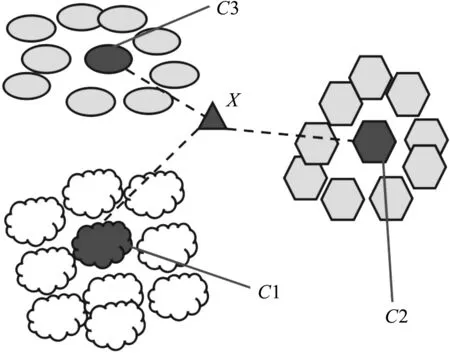
圖2 原型網(wǎng)絡(luò)示意圖
圖2中,C1、C2和C3分別代表3個(gè)種類的類原型;X表示待分類樣本點(diǎn)。
假設(shè)數(shù)據(jù)集D={(x1,y1),(x2,y2),(x3,y3),…,(xn,yn)},在階段性訓(xùn)練時(shí),筆者從D中隨機(jī)抽取n個(gè)樣本點(diǎn)用于組成支持集S。同理,筆者選擇與支持集不同的n個(gè)樣本點(diǎn),將其組成查詢集Q。
原型網(wǎng)絡(luò)計(jì)算流程圖如圖3所示[13]。
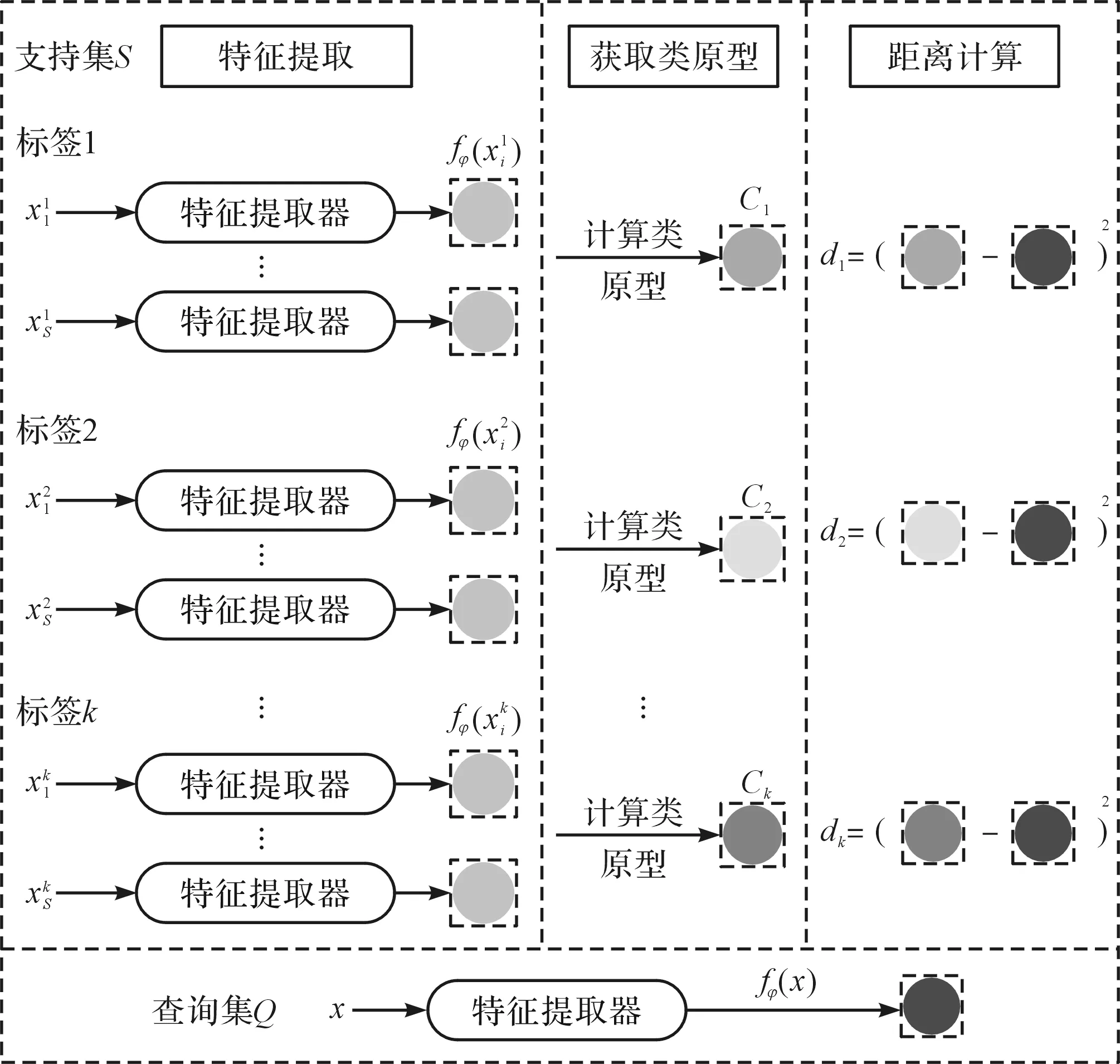
圖3 原型網(wǎng)絡(luò)計(jì)算流程圖
圖3中,原型網(wǎng)絡(luò)的結(jié)構(gòu)主要分為3個(gè)模塊,即特征提取、獲得類原型和距離計(jì)算。
圖中fφ(·)為特征提取器,特征提取器通常是三層卷積神經(jīng)網(wǎng)絡(luò),卷積層1參數(shù)為[3,64,3](輸入通道為3,輸出通道為64,卷積核大小為3×3);卷積層2參數(shù)為[64,64,3];卷積層3參數(shù)為[64,64,3]。其中,每層卷積輸出時(shí)都通過(guò)了批正則化、激活層和最大池化層。
首先,筆者將支持集中各故障類別數(shù)據(jù)輸入特征提取器中,學(xué)習(xí)數(shù)據(jù)中的非線性特征,得到每個(gè)樣本的數(shù)據(jù)特征;然后,計(jì)算每一類數(shù)據(jù)樣本特征的平均值,得到類原型Ci。
Ci計(jì)算方法如下:
(1)
式中:S為支持集中總的樣本數(shù)量;(xi,yi)為樣本的特征和標(biāo)簽;fφ(xi)為特征提取器提取的特征。
然后,筆者將查詢集中的查詢點(diǎn)數(shù)據(jù)輸入到同一個(gè)原型網(wǎng)絡(luò)中的特征提取器,得到特征嵌入CQ;再依次計(jì)算CQ與各類原型的距離,即得到查詢集嵌入特征與各類原型的距離度量d,d越小,相似性越大;最后將d取負(fù),將其輸入SoftMax函數(shù)中,預(yù)測(cè)查詢集屬于某個(gè)類別的概率pφ(y=k|x)。
概率計(jì)算如下:
(2)
式中:d為查詢點(diǎn)與類原型之間的歐式距離,距離越小,相似性越大。
1.3 Inception模塊
筆者將Inception模塊引入原型網(wǎng)絡(luò)的特征提取層中,在保證模型原有效果的前提下,Inception可以增加網(wǎng)絡(luò)的寬度,以獲得多通道信息交互的特征數(shù)據(jù)。
Inception模塊的多分支結(jié)構(gòu)相當(dāng)于多次對(duì)輸入數(shù)據(jù)進(jìn)行提取,可以更好地提取并保留輸入圖像的細(xì)節(jié)特征,從而提高模型整體的特征表達(dá)能力。
筆者所提出的Inception模塊結(jié)構(gòu)如圖4所示。
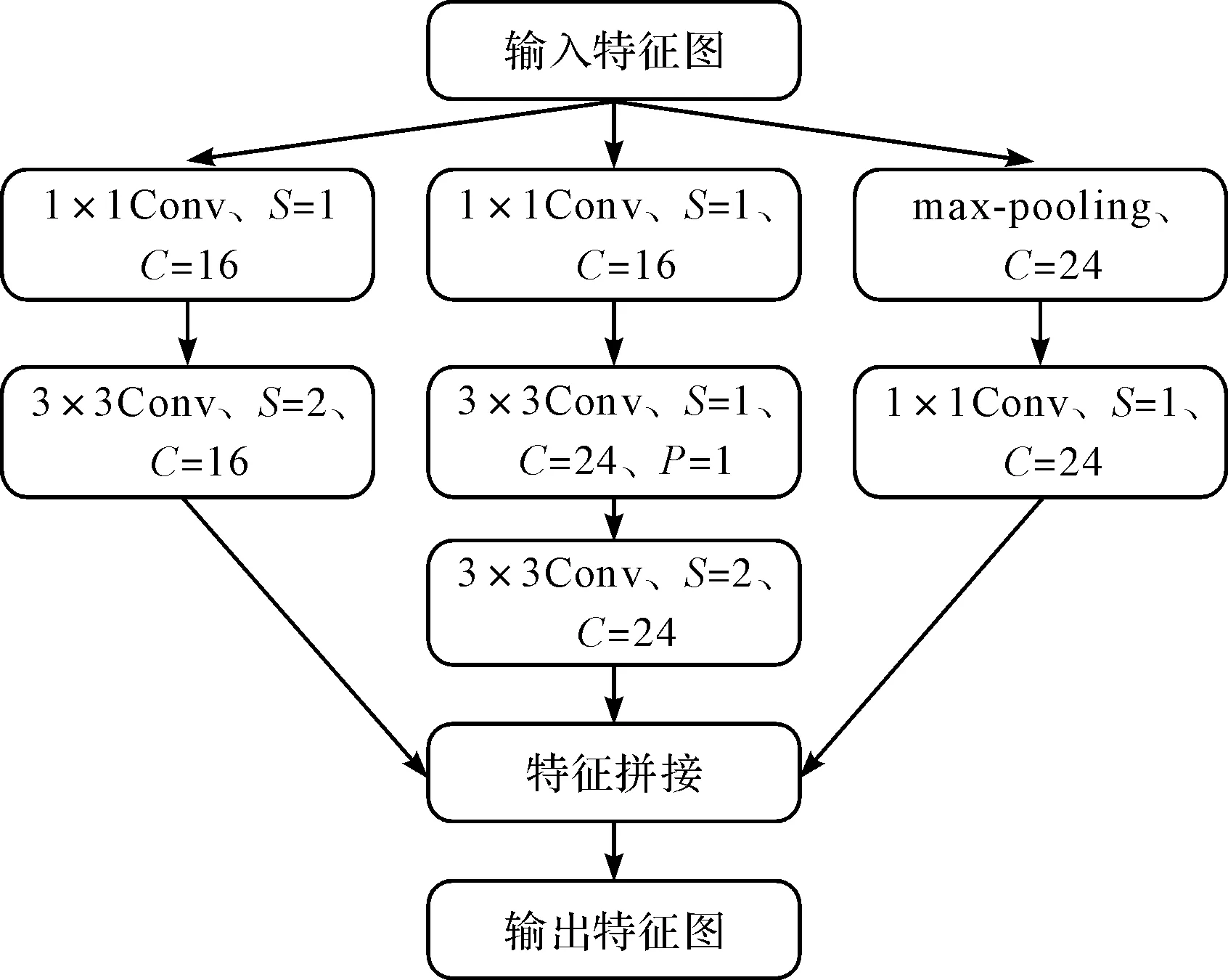
圖4 Inception模塊結(jié)構(gòu)
圖4的Inception結(jié)構(gòu)由3個(gè)不同感受野的分支組成。輸入的故障數(shù)據(jù)經(jīng)多分支處理后,能獲得含有多通道信息交互的特征圖。第一分支(從左往右)先通過(guò)步長(zhǎng)為1的1×1卷積核,以減少輸入特征參數(shù),然后通過(guò)3×3卷積層(其中步長(zhǎng)為2,填充為0);第二分支先通過(guò)1×1卷積層,再通過(guò)2個(gè)步長(zhǎng)和填充分別為1、1和2、0的3×3卷積層,以更好地提取故障數(shù)據(jù)的特征;第三分支先通過(guò)步長(zhǎng)為2,填充為0的最大池化層,對(duì)其進(jìn)行池化,以減少參數(shù)的數(shù)量,然后通過(guò)步長(zhǎng)為1,填充為0的1×1的卷積核。
筆者將經(jīng)過(guò)3個(gè)分支處理后的特征進(jìn)行拼接,得到多通道信息交互的特征數(shù)據(jù),從而提高網(wǎng)絡(luò)的特征提取能力。
2 基于改進(jìn)原型網(wǎng)絡(luò)的故障診斷方法
齒輪故障診斷是一個(gè)典型的小樣本分類問(wèn)題,因此,基于元學(xué)習(xí)技術(shù)中的原型網(wǎng)絡(luò),筆者提出了一種變工況下齒輪故障診斷方法(VWFD)。
VWFD診斷模型如圖5所示。

圖5 VWFD診斷模型
圖5中,VWFD模型主要分為數(shù)據(jù)輸入模塊、數(shù)據(jù)劃分模塊、特征提取模塊和距離計(jì)算模塊。
首先,筆者對(duì)原始故障數(shù)據(jù)進(jìn)行重采樣,并進(jìn)行STFT處理,將處理好的時(shí)頻特征圖劃分為支持集和查詢集;再采用含有Inception模塊的特征提取器,獲取更全面的故障特征,利用支持集計(jì)算各類齒輪故障的故障類原型;然后計(jì)算查詢集與各故障類原型的歐式距離,將距離結(jié)果輸入SoftMax分類器中,得到故障預(yù)測(cè)結(jié)果;采用交叉熵?fù)p失函數(shù)計(jì)算預(yù)測(cè)結(jié)果與真實(shí)結(jié)果的損失,并采用Adam算法更新模型超參數(shù),學(xué)習(xí)率設(shè)置為0.001,對(duì)模型進(jìn)行反復(fù)訓(xùn)練,直至得到最優(yōu)模型參數(shù)與齒輪故障類原型。
VWFD模型的結(jié)構(gòu)與參數(shù)如表1所示。
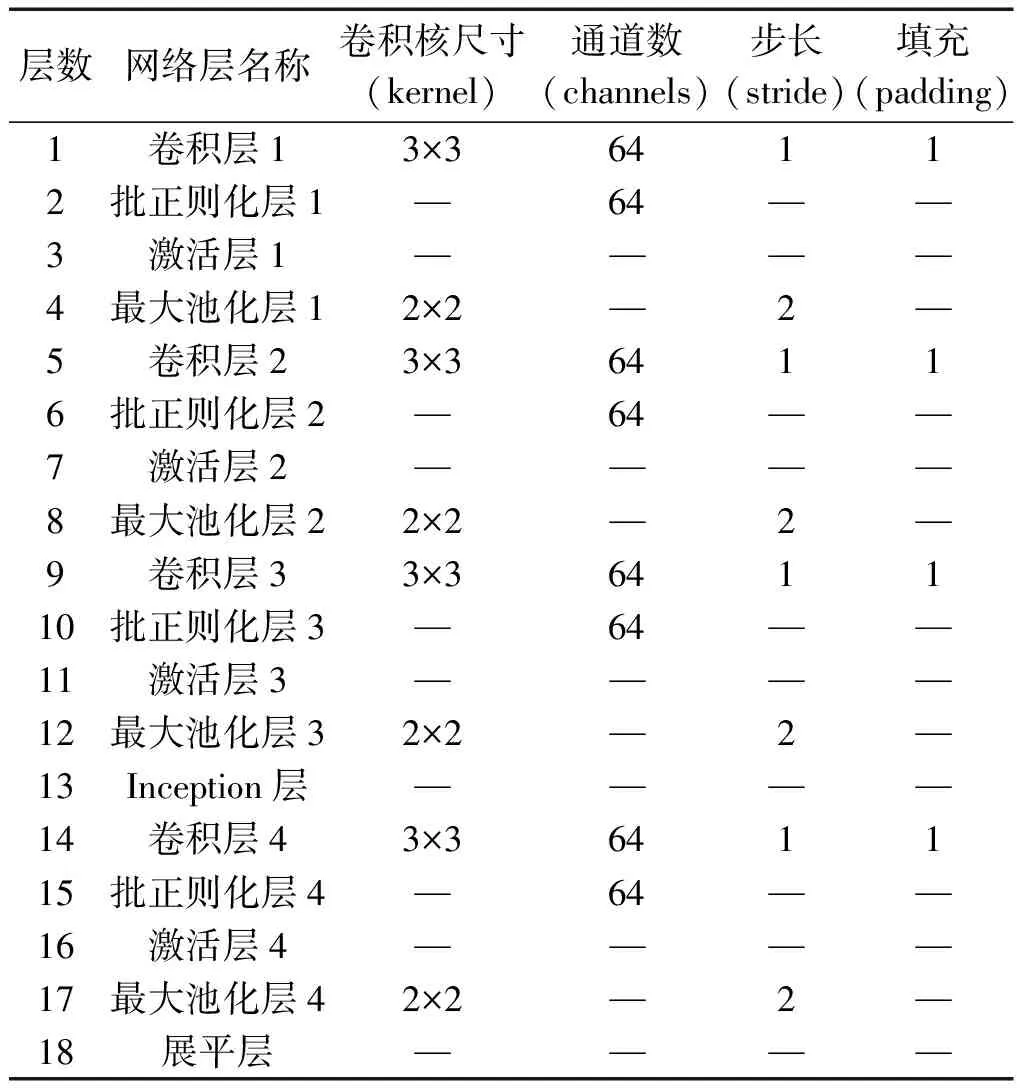
表1 模型結(jié)構(gòu)與參數(shù)
筆者在卷積層1、2、3、4的后面均添加了批正則化、激活層和最大池化層。
為了能夠使模型收斂得更快,并減弱過(guò)擬合,激活層的激活函數(shù)采用ReLU。
2.1 數(shù)據(jù)預(yù)處理
文獻(xiàn)[14]指出,振動(dòng)信號(hào)的時(shí)頻特征圖作為卷積神經(jīng)網(wǎng)絡(luò)的輸入數(shù)據(jù)非常合適。因此,筆者采用STFT將齒輪振動(dòng)信號(hào)轉(zhuǎn)化成二維時(shí)頻特征圖像。
STFT的實(shí)質(zhì)是對(duì)信號(hào)做傅里葉變換之前,引入一個(gè)時(shí)間有限的窗函數(shù)h(t),對(duì)其進(jìn)行分析,并假設(shè)非平穩(wěn)信號(hào)在分析窗的短時(shí)間隔內(nèi)是平穩(wěn)的,然后進(jìn)行傅里葉變換。
其具體的計(jì)算公式如下[15]:
(3)
式中:x(τ)為時(shí)域信號(hào);ω為頻率;t為時(shí)間;h(τ-t)為以t為中心的窗函數(shù)。
當(dāng)模型缺乏訓(xùn)練樣本,尤其是樣本之間特征變化過(guò)小時(shí),其可能會(huì)出現(xiàn)過(guò)擬合的問(wèn)題,從而降低模型的分類效果。此時(shí),可以采用重疊采樣的方法進(jìn)行數(shù)據(jù)樣本量的擴(kuò)充,以緩解模型的過(guò)擬合,提高模型的分類精度。
數(shù)據(jù)重采樣如圖6所示。
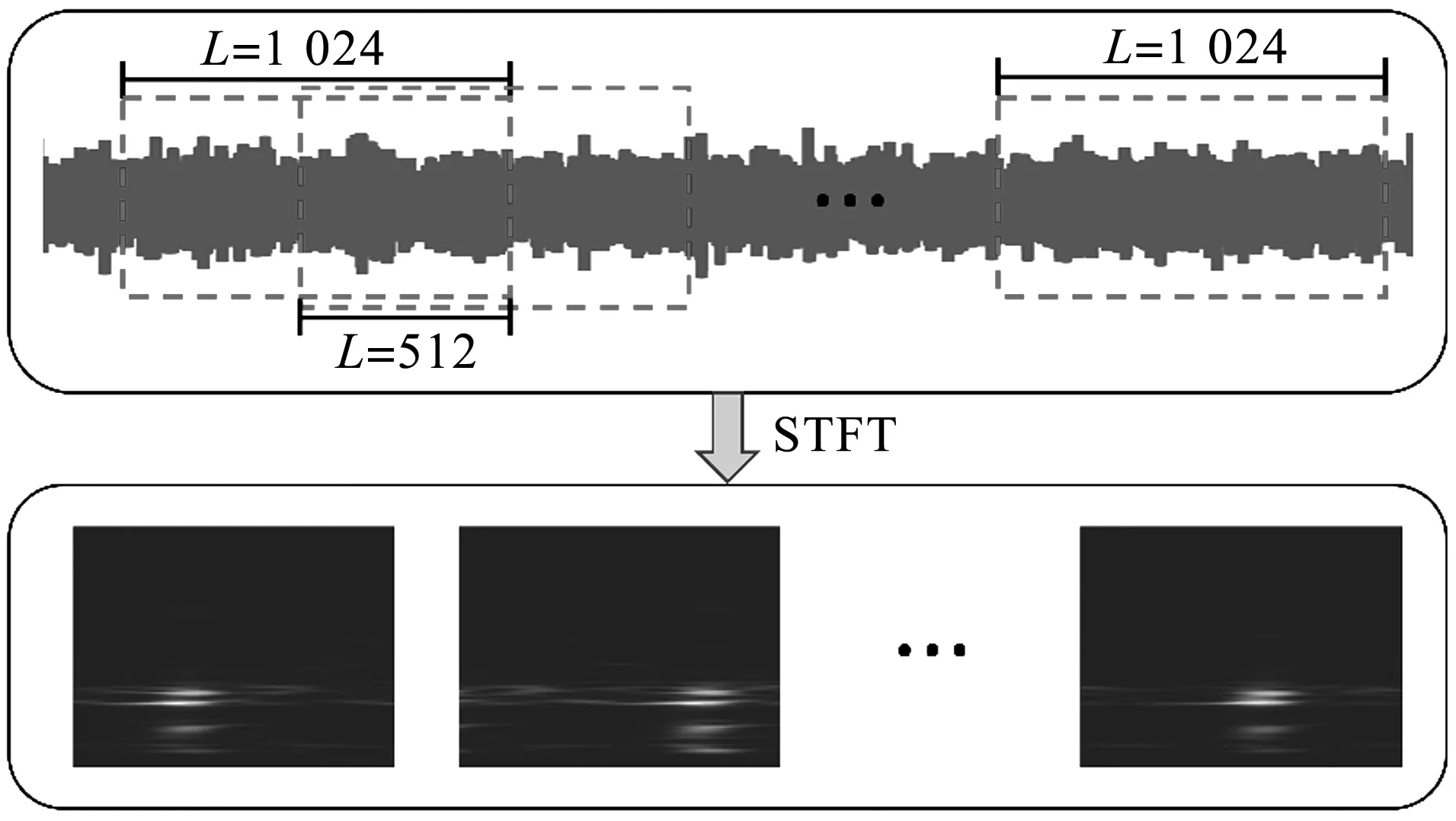
圖6 原始數(shù)據(jù)樣本擴(kuò)充
圖6中,對(duì)于原始齒輪故障時(shí)域信號(hào),采用大小為1 024的窗口(即1 024個(gè)數(shù)據(jù)點(diǎn))進(jìn)行重采樣,以擴(kuò)充數(shù)據(jù)的樣本,且信號(hào)的重疊率為0.5。
采用重疊采樣,不僅能增加樣本,還可增加樣本之間的相關(guān)性,從而增強(qiáng)訓(xùn)練模型的魯棒性。
2.2 變工況齒輪故障診斷流程
筆者提出的改進(jìn)原型網(wǎng)絡(luò)變工況齒輪故障診斷流程如圖7所示。
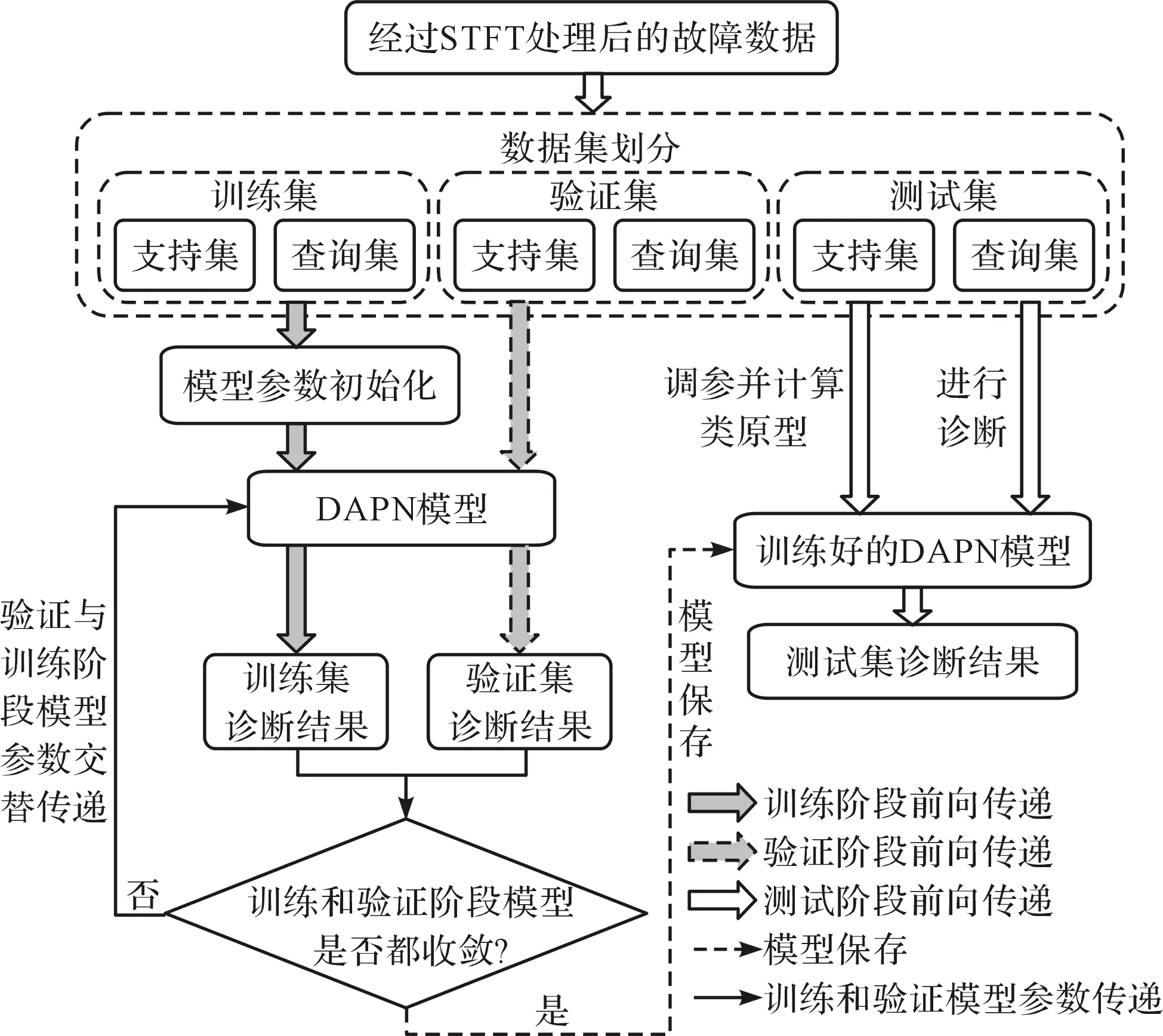
圖7 原型網(wǎng)絡(luò)齒輪故障診斷方法流程
首先,筆者將預(yù)處理好的故障數(shù)據(jù)劃分為訓(xùn)練集、驗(yàn)證集和測(cè)試集(3個(gè)數(shù)據(jù)集的齒輪故障類別完全不同),并將這3個(gè)數(shù)據(jù)集劃分為支持集和查詢集;
然后,在訓(xùn)練階段,采用訓(xùn)練集進(jìn)行模型的預(yù)訓(xùn)練,將訓(xùn)練階段模型參數(shù)傳遞給驗(yàn)證階段,進(jìn)行驗(yàn)證,并判斷訓(xùn)練和驗(yàn)證階段的模型是否收斂;若都沒(méi)收斂,將驗(yàn)證階段得到的模型參數(shù)再次傳遞給訓(xùn)練階段,即一輪訓(xùn)練一輪驗(yàn)證,直至訓(xùn)練階段和驗(yàn)證階段的模型都收斂,以該機(jī)制進(jìn)行訓(xùn)練,最終得到既含有訓(xùn)練集又含有驗(yàn)證集元知識(shí)的模型;
最后,將得到的模型參數(shù)傳遞給測(cè)試集進(jìn)行測(cè)試,即可實(shí)現(xiàn)變工況下的齒輪故障診斷目的。
3 變工況齒輪故障診斷實(shí)驗(yàn)
3.1 實(shí)驗(yàn)數(shù)據(jù)采集
為了驗(yàn)證VWFD模型的有效性,筆者采用功率開(kāi)放式齒輪傳動(dòng)裝置作為實(shí)驗(yàn)平臺(tái),對(duì)標(biāo)準(zhǔn)漸開(kāi)線圓柱直齒輪進(jìn)行齒輪故障運(yùn)行故障模擬實(shí)驗(yàn),以采集齒輪故障數(shù)據(jù)。
齒輪實(shí)驗(yàn)平臺(tái)如圖8所示。
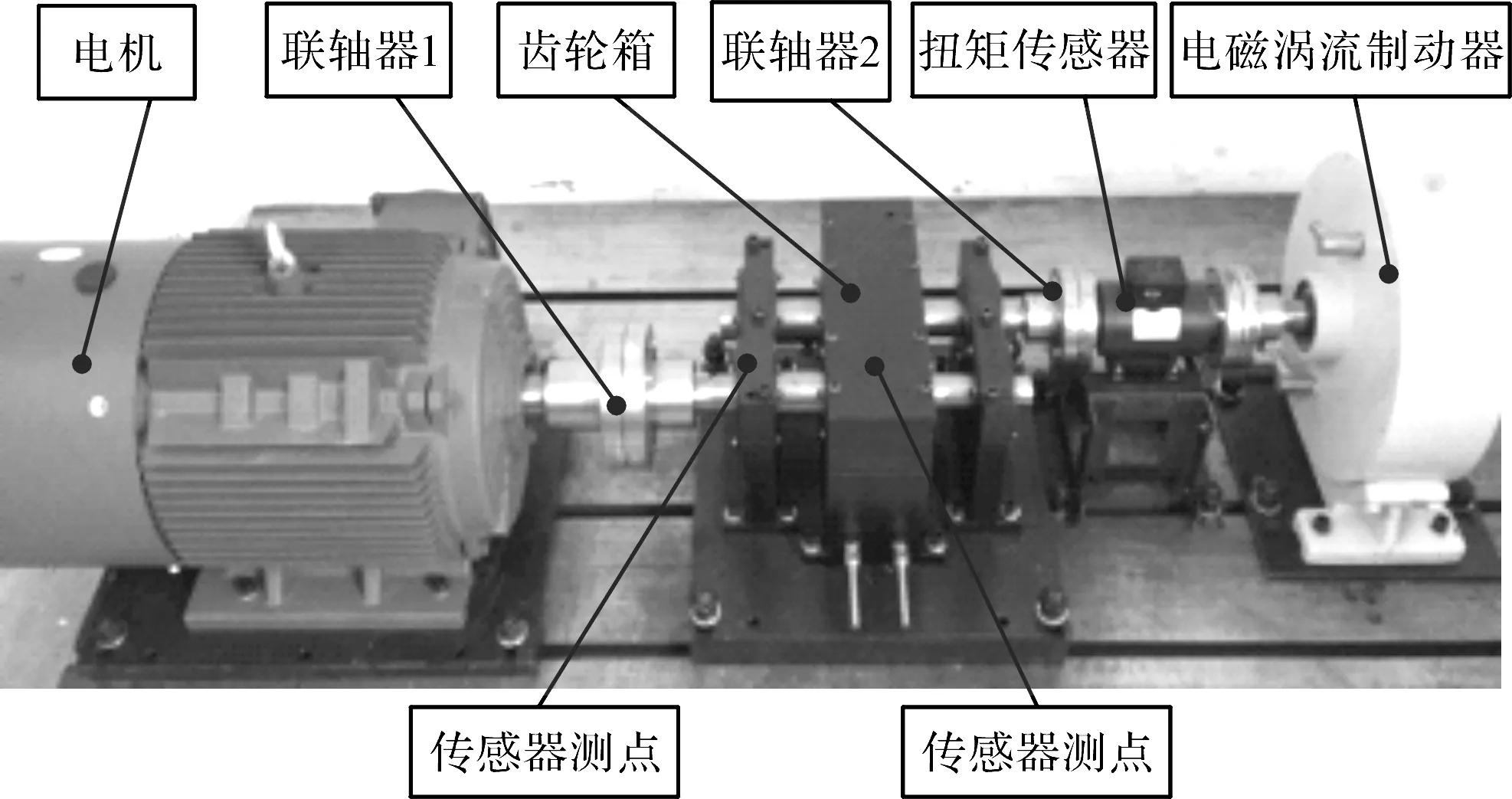
圖8 齒輪實(shí)驗(yàn)平臺(tái)
實(shí)驗(yàn)平臺(tái)主要由1個(gè)變速三相異步電機(jī)、3個(gè)聯(lián)軸器、1個(gè)齒輪箱、1個(gè)扭矩傳感器和1個(gè)電磁渦流制動(dòng)器組成。
筆者選擇點(diǎn)蝕齒輪進(jìn)行故障診斷研究,選擇5種齒輪進(jìn)行測(cè)試,即正常齒輪(Normal)、1個(gè)點(diǎn)蝕齒輪(1spot)、2個(gè)點(diǎn)蝕齒輪(2spot)、3個(gè)點(diǎn)蝕齒輪(3spot)和嚴(yán)重點(diǎn)蝕齒輪(pitting)。
正常齒輪的齒面無(wú)故障。為模擬輕微點(diǎn)蝕故障及其發(fā)展趨勢(shì),筆者在正常輪齒的齒面上人工鉆取一些點(diǎn)損傷,稱為點(diǎn)蝕齒輪。
具體齒面情況如圖9所示。

圖9 實(shí)驗(yàn)齒輪齒面
圖9(a)為齒面無(wú)故障的正常齒輪;
圖9(b)為1個(gè)點(diǎn)蝕損傷齒輪,在其1個(gè)齒面上的嚙合節(jié)線上鉆1個(gè)直徑為2 mm、深度約為0.3 mm的點(diǎn)損傷,形狀類似橢圓形;
圖9(c)和圖9(d)分別為在其嚙合節(jié)線上有2個(gè)和3個(gè)點(diǎn)蝕損傷的齒輪,點(diǎn)蝕大小和鉆孔位置與上述保持一致;
圖9(e)為實(shí)際嚴(yán)重點(diǎn)蝕齒輪。齒輪箱中主動(dòng)輪為故障齒輪,從動(dòng)輪為正常齒輪。
筆者采集了不同轉(zhuǎn)速與不同負(fù)載下的點(diǎn)蝕齒輪故障數(shù)據(jù),轉(zhuǎn)速分為1 200 r/min、1 800 r/min、2 400 r/min和3 000 r/min,負(fù)載分為40 N·m、60 N·m和70 N·m,采樣頻率為20 kHz,齒輪測(cè)試時(shí)間為2 s。因此,每種故障齒輪有12種運(yùn)行工況。
筆者采用上述重采樣技術(shù),對(duì)原始齒輪故障信號(hào)進(jìn)行切片,以擴(kuò)充故障樣本。因此,在較少原始樣本的情況下,每種工況下齒輪能獲得100個(gè)樣本,數(shù)據(jù)集總樣本數(shù)量為6 000。
3.2 變工況實(shí)驗(yàn)數(shù)據(jù)集劃分
該實(shí)驗(yàn)主要分為3種變工況類型的齒輪故障診斷:1)同負(fù)載、不同轉(zhuǎn)速;2)不同負(fù)載、相同轉(zhuǎn)速;3)不同負(fù)載、不同轉(zhuǎn)速。
具體數(shù)據(jù)集劃分如表2所示。
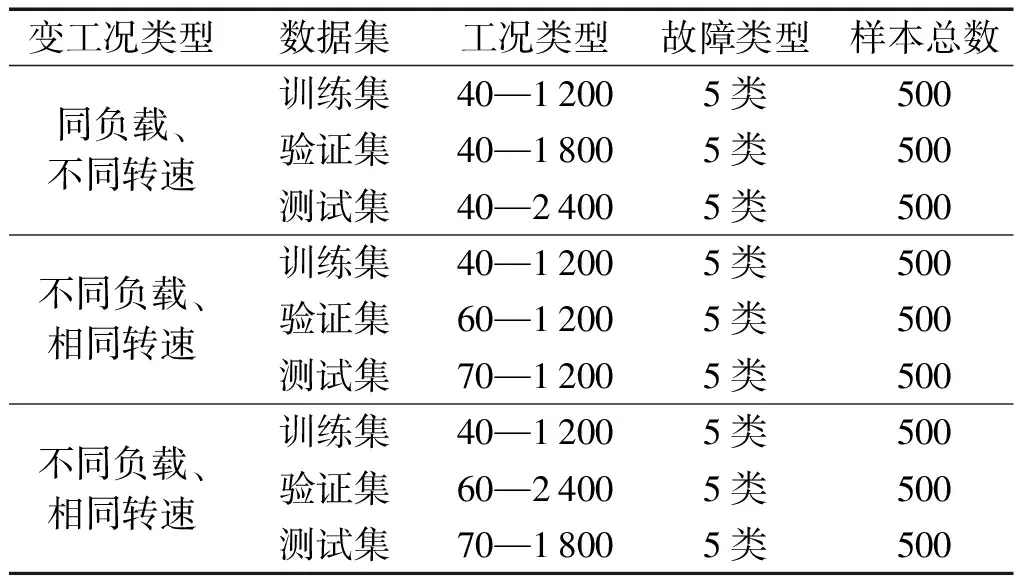
表2 數(shù)據(jù)集劃分
表2中,40~1 200代表齒輪的運(yùn)行工況為負(fù)載40 N,轉(zhuǎn)速1 200 r/min;故障類型的5類分別為Normal、1 spot、2 spot、3 spot和pitting,且每類樣本數(shù)均為100。
上述3種變工況類型的診斷實(shí)驗(yàn)都設(shè)置了3-way 1-shot、3-way 3-shot、3-way 5-shot等實(shí)驗(yàn)組,即每一個(gè)訓(xùn)練、驗(yàn)證和測(cè)試的task任務(wù)中都包含3種不同的故障類型,每個(gè)任務(wù)中的支持集分別含有1個(gè)、3個(gè)和5個(gè)故障樣本,與之對(duì)應(yīng)的查詢集中分別含有1個(gè)、3個(gè)和5個(gè)故障樣本;
同時(shí),筆者也設(shè)置了5-way 1-shot、5-way 3-shot、5-way 5-shot實(shí)驗(yàn)組,每組的task任務(wù)中包含5種不同的故障類型,每個(gè)task任務(wù)下對(duì)應(yīng)的支持集和查詢集的設(shè)置同上。
筆者按照?qǐng)D7所示的訓(xùn)練流程進(jìn)行模型的訓(xùn)練,設(shè)置模型訓(xùn)練和驗(yàn)證的迭代輪數(shù)為250。
由于不同特征對(duì)各故障的效果不同,為了減少故障診斷過(guò)程中人為操作對(duì)原始數(shù)據(jù)的影響,筆者直接使用原始齒輪振動(dòng)數(shù)據(jù)進(jìn)行短時(shí)傅里葉變換(STFT),再進(jìn)行故障的診斷。
3.3 模型驗(yàn)證
在圖5的特征提取模塊中,Inception模塊引入的位置和數(shù)量對(duì)網(wǎng)絡(luò)整體特征提取能力的改進(jìn)效果并不一樣,模塊引入的位置和數(shù)量不對(duì),反而會(huì)使模型的診斷精度下降。
為了驗(yàn)證Inception模塊的合理性,找出最優(yōu)引入數(shù)量與引入位置,筆者進(jìn)行了一系列對(duì)比實(shí)驗(yàn)。數(shù)據(jù)集選用表2中同負(fù)載、不同轉(zhuǎn)速數(shù)據(jù)集,實(shí)驗(yàn)組為5-way 5-shot。
不同數(shù)量與位置Inception模塊實(shí)驗(yàn)對(duì)比結(jié)果,如圖10所示。
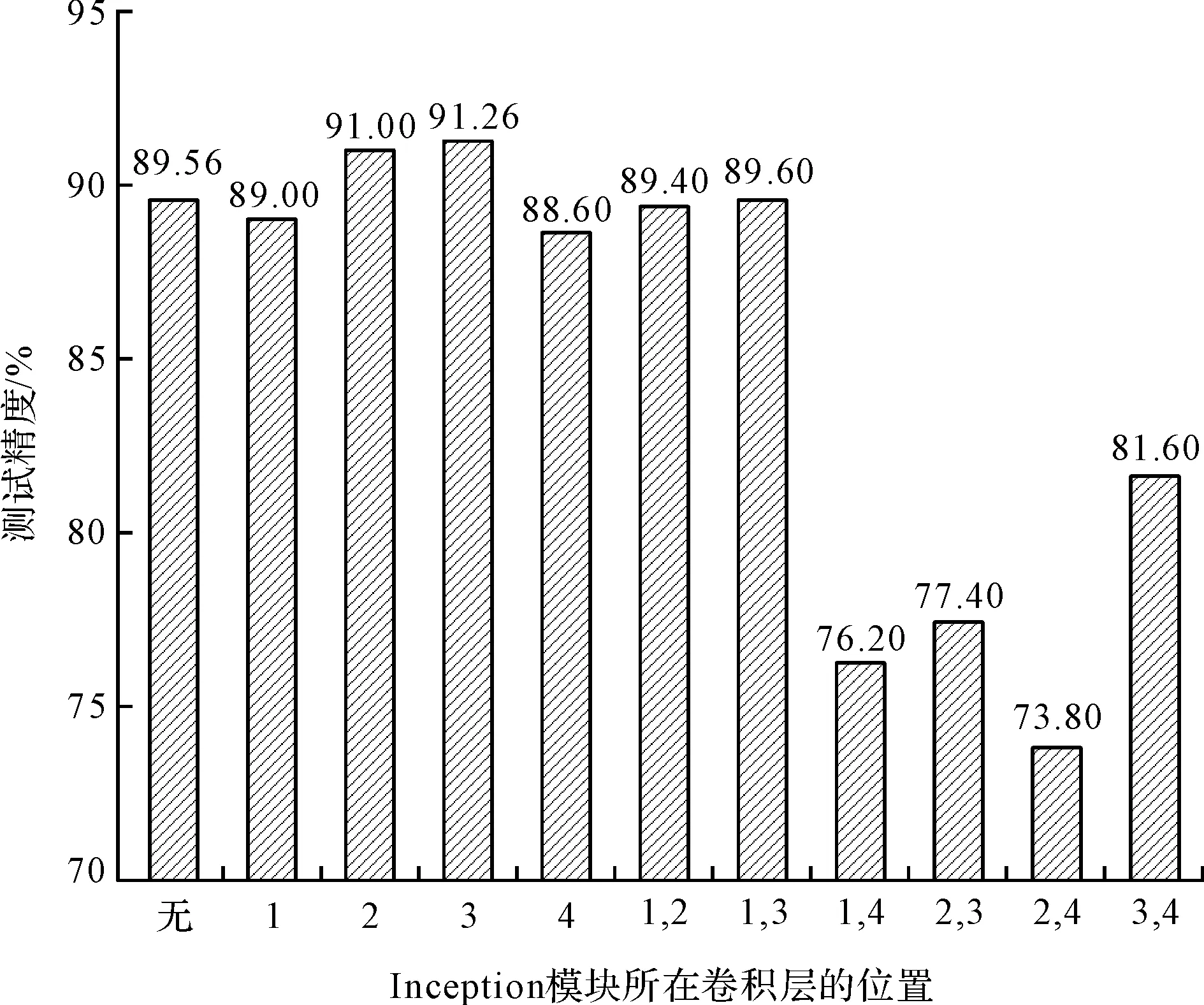
圖10 不同數(shù)量與位置Inception模塊實(shí)驗(yàn)對(duì)比結(jié)果
圖10中:實(shí)驗(yàn)結(jié)果為進(jìn)行5次實(shí)驗(yàn)的平均結(jié)果,橫坐標(biāo)中的“無(wú)”代表不引入Inception模塊的原型網(wǎng)絡(luò);“1”代表在圖5所示特征提取模塊的Conv-1后面引入一個(gè)Inception模塊;“1,3”代表在特征提取模塊的Conv-1和Conv-3后面分別引入一個(gè)Inception模塊,其他以此類推。
從圖10可知:當(dāng)不引入Inception模塊時(shí),原始模型的診斷精度為89.56%;當(dāng)Inception模塊放在特征提取模塊Conv-3后面時(shí)(引入數(shù)量為1),模型的診斷精確度高達(dá)91.26%,比不引入Inception模塊時(shí)的診斷精度提高了1.7%,并且比Inception模塊放在其他任何位置時(shí)的診斷精確度都高;此外,當(dāng)Inception模塊引入的數(shù)量為2個(gè)模塊時(shí),無(wú)論將其放在任何位置,其模型的診斷精度均遠(yuǎn)比引入一個(gè)Inception模塊的診斷精度要低,且比不引入Inception模塊的診斷精度還低。
以上結(jié)果表明,VWFD模型與Inception模塊引入的位置和數(shù)量合理有效。
3.4 實(shí)驗(yàn)與結(jié)果分析
為驗(yàn)證VWFD模型在變工況下的齒輪故障診斷性能,筆者采用表2中的3類變工況齒輪故障數(shù)據(jù)進(jìn)行實(shí)驗(yàn);同時(shí),為了避免實(shí)驗(yàn)結(jié)果具有偶然性,每類工況實(shí)驗(yàn)均進(jìn)行5次,并求取其平均值。
VWFD模型診斷實(shí)驗(yàn)結(jié)果如表3所示。
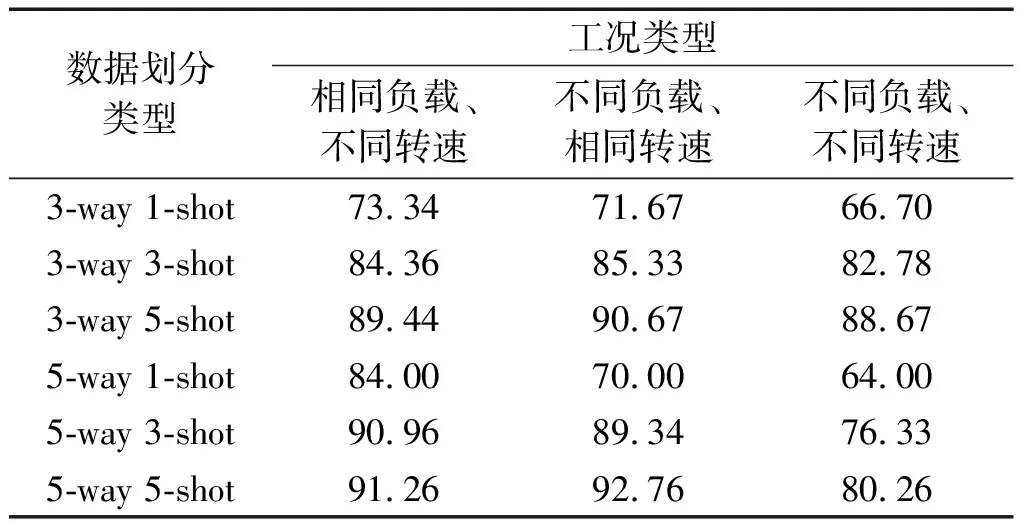
表3 VWFD模型3種變工況類型診斷實(shí)驗(yàn)結(jié)果 (%)
從表3可知:VWFD模型在故障類別數(shù)(way)一樣,支持集和查詢集的樣本數(shù)為1時(shí),模型的故障診斷精度都能達(dá)到64%以上,并隨著樣本數(shù)量的增加,模型的故障診斷精度也隨之提高;當(dāng)故障類別數(shù)為5,支持集和查詢集的樣本數(shù)為5時(shí),3種變工況類型的診斷精確度都能達(dá)到90%以上;在相同負(fù)載、不同轉(zhuǎn)速的變工況故障診斷類型中,當(dāng)樣本數(shù)量一致時(shí),隨著故障類別數(shù)的增加,模型的診斷精度也會(huì)有一定程度的提高。
為了更加直觀地展示出VWFD模型在故障診斷中的表現(xiàn),筆者將表3中的實(shí)驗(yàn)結(jié)果(診斷精度為92.76%)導(dǎo)入混淆矩陣,并繪制該模型在測(cè)試集上的診斷結(jié)果。混淆矩陣能清晰地展示每類故障被正確診斷與誤診的數(shù)量,以及被誤診為何種故障。
測(cè)試集診斷結(jié)果混淆矩陣如圖11所示。
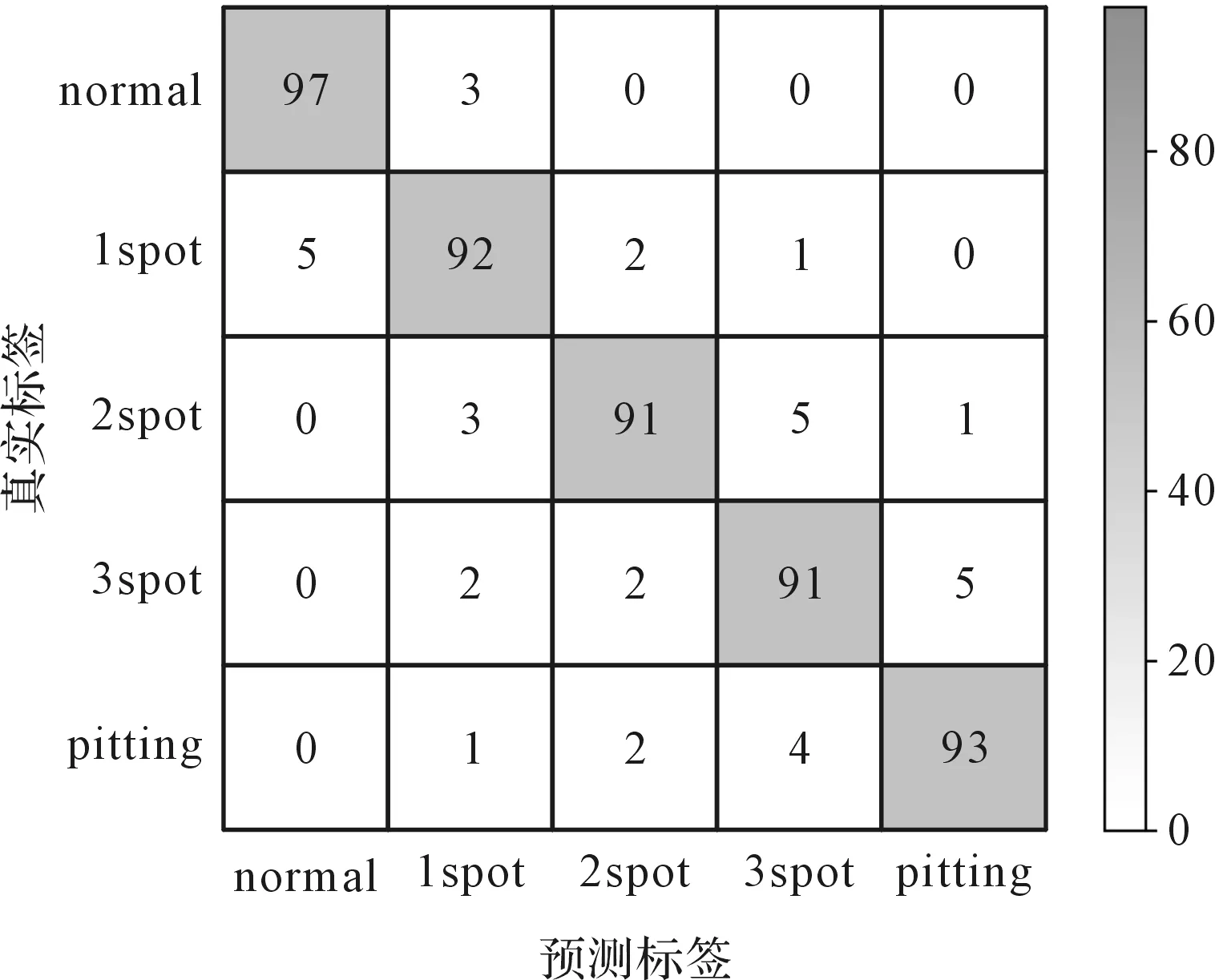
圖11 測(cè)試集診斷結(jié)果混淆矩陣
圖11中,橫坐標(biāo)為預(yù)測(cè)標(biāo)簽,縱坐標(biāo)為真實(shí)標(biāo)簽,主對(duì)角線上的數(shù)字為故障類別預(yù)測(cè)正確的數(shù)量,其余數(shù)字為被誤診的數(shù)量以及具體被誤診為何種故障。
由圖11可以看出:VWFD對(duì)于齒輪早期輕微點(diǎn)蝕故障診斷具有較高的診斷精度,由于1 spot故障齒輪是輕微的齒輪故障,其故障信號(hào)與正常齒輪信號(hào)差異不是很大,所以兩者之間相互被誤判的次數(shù)比較多。
為驗(yàn)證VWFD模型的優(yōu)越性,在數(shù)據(jù)集相同的前提下,筆者將該模型與SVM、CNN和PN這3種故障診斷模型(方法)進(jìn)行了對(duì)比。其中,CNN的特征提取模塊為3層的卷積神經(jīng)網(wǎng)絡(luò)和1層全連接層,卷積層1參數(shù)為[3,64,3](輸入通道為3,輸出通道為64,卷積核大小為3×3);卷積層2參數(shù)為[64,64,3];卷積層3參數(shù)為[64,64,3]。其中,每層卷積輸出時(shí),都通過(guò)了批正則化、激活層和最大池化層。
為避免實(shí)驗(yàn)結(jié)果的偶然性,筆者對(duì)上述幾種故障診斷方法分別進(jìn)行了5次實(shí)驗(yàn),并取其平均值。
4種故障診斷模型的對(duì)比實(shí)驗(yàn)結(jié)果,即平均準(zhǔn)確率如表4所示。
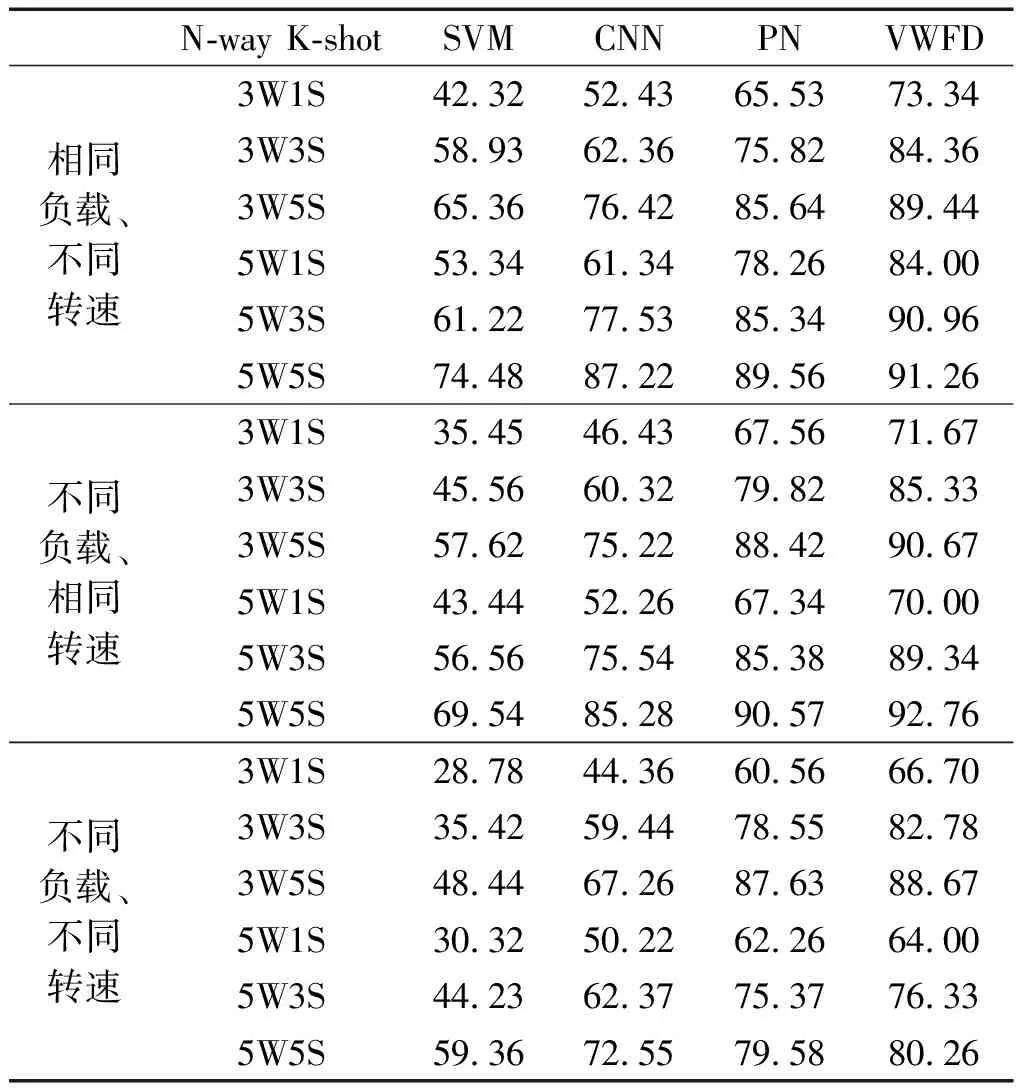
表4 4種故障診斷模型對(duì)比實(shí)驗(yàn)結(jié)果 (%)
從表4可以看出:不管是在哪種變工況類型下的故障診斷中,對(duì)比其他3種故障診斷方法,VWFD方法的測(cè)試準(zhǔn)確率是最高的。這表明VWFD模型具有較好的故障特征提取能力,有利于得到更準(zhǔn)確的故障類原型,提高模型在變工況下的診斷精度;
當(dāng)故障類別(way)一定時(shí),隨著樣本數(shù)量(shot)的增加,上面4種故障診斷方法的測(cè)試準(zhǔn)確率都得到了提高。這說(shuō)明在故障診斷中,樣本量的增加有利于提高模型的測(cè)試精度,且在一定程度上可以緩解模型過(guò)擬合。
在上述3種變工況故障診斷實(shí)驗(yàn)中,當(dāng)way和shot一定時(shí),傳統(tǒng)的機(jī)器學(xué)習(xí)方法SVM的測(cè)試診斷精度都低于其他3種基于深度學(xué)習(xí)的故障診斷方法,尤其是在不同轉(zhuǎn)速、不同負(fù)載變工況故障診斷實(shí)驗(yàn)下的3-way 3-shot實(shí)驗(yàn)組中,SVM的測(cè)試準(zhǔn)確率最低,只有35.42%;由于CNN特征提取能力的提高,測(cè)試準(zhǔn)確率相較SVM提高了24.02%;基于度量學(xué)習(xí)的PN相較于CNN的測(cè)試準(zhǔn)確率提高了19.11%,PN模型能夠很好地提取故障特征,并利用基于度量的學(xué)習(xí),計(jì)算得到各類齒輪故障的類原型,提高模型的診斷精度。
筆者提出的基于改進(jìn)原型網(wǎng)絡(luò)的VWFD模型雖然在一定程度上增加了網(wǎng)絡(luò)的復(fù)雜性,但其泛化能力和特征提取能力相較于PN都有所提升,準(zhǔn)確率也比PN提高了4.23%。
以上結(jié)果可以進(jìn)一步證明,VWFD方法在變工況下的點(diǎn)蝕齒輪故障診斷中是有效的,即在原型網(wǎng)絡(luò)中添加Inception模塊,有助于提高模型的性能,以及模型的診斷精度及其泛化能力。
4 結(jié)束語(yǔ)
在變工況齒輪故障診斷過(guò)程中,存在齒輪運(yùn)行工況多變、數(shù)據(jù)分布差異性大等問(wèn)題,導(dǎo)致傳統(tǒng)的深度學(xué)習(xí)模型通用性差和診斷精度低。為此,筆者提出了一種基于元學(xué)習(xí)技術(shù)的變工況齒輪故障診斷方法,并搭建了齒輪實(shí)驗(yàn)平臺(tái),采集不同工況下的點(diǎn)蝕齒輪故障數(shù)據(jù),對(duì)VWFD方法的適用性和有效性進(jìn)行了驗(yàn)證。
研究結(jié)果如下:
1)將元學(xué)習(xí)技術(shù)中的原型網(wǎng)絡(luò)運(yùn)用在變工況齒輪故障診斷中,基于原型網(wǎng)絡(luò)建立了各類型工況下的齒輪故障類原型,利用歐式距離來(lái)計(jì)算查詢點(diǎn)與類原型的距離,并進(jìn)行分類,這在一定程度上提高了變工況齒輪故障診斷的準(zhǔn)確率和模型的通用性;
2)在原型網(wǎng)絡(luò)的特征提取器中引入Inception模塊,可使網(wǎng)絡(luò)能夠?qū)斎霐?shù)據(jù)特征進(jìn)行多次提取,并保留更多的故障細(xì)節(jié)特征信息,提高了模型整體的特征表達(dá)能力,使原型網(wǎng)絡(luò)獲得了更加準(zhǔn)確的故障類原型,提高了模型的診斷精度;
3)在變工況點(diǎn)蝕齒輪故障數(shù)據(jù)相同的條件下,VWFD與SVM、CNN和PN方法的故障診斷結(jié)果對(duì)比表明,VWFD模型的故障診斷精度明顯優(yōu)于上述3種方法,特別是在不同負(fù)載、相同轉(zhuǎn)速變工況故障診斷實(shí)驗(yàn)下的5-way 5-shot實(shí)驗(yàn)組中,該模型的診斷精度高達(dá)92.76%。
在上述變工況的齒輪故障診斷實(shí)驗(yàn)中,筆者只選取了點(diǎn)蝕故障。因此,在后續(xù)的研究中,筆者將繼續(xù)對(duì)變工況下的其他齒輪故障類型進(jìn)行診斷實(shí)驗(yàn)。
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:00
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
機(jī)械與電子(2014年1期)2014-02-28 02:07:31