基于激光雷達的散貨裝船機智能防撞系統*
2023-11-02 10:41:10歐陽興東張春光劉洪傳黃開萍周智恒鄧永裕董美蓉
港口裝卸 2023年5期
歐陽興東 張春光 劉洪傳 黃開萍 周智恒鄧永裕 陳 煒 董美蓉
1 廣州發展燃料港口有限公司 2 華南理工大學電力學院
1 引言
散貨裝船機是用于裝載煤炭、礦石、谷物等散裝貨物的專用設備,在港口物流中發揮重要的作用。傳統散貨裝船機通常依靠人工操作進行貨物裝載,存在一些由主客觀因素導致的安全隱患;由于裝船機操作空間狹小、工作環境復雜,人工操作容易受到影響,從而增加事故發生的風險;裝船機在裝載過程中需要與船舶緊密對接,如果操作不慎可能會引發意外事故,導致人員傷害和設備損壞等問題[1]。
為了解決上述問題,已有研究者提出一些優化方案。楊文博提出一種基于編碼器的溜筒防碰撞限位策略,通過設置裝船機整機行走及臂架伸縮極限限位的方法,為溜筒限定安全作業區。這種機械限位的方法只有當溜筒運動到極限位置才能觸發響應,而無法應對諸如船體漂移引發的碰撞等突發狀況[2]。閆超結合裝船機工作實際情況,通過在溜筒平臺安裝雷達傳感器的形式設計出一套保護裝置,使得溜筒防碰撞響應更加靈活,可提高設備安全性[3]。實際上,裝船機在裝料作業和移艙過程中涉及到整機行走、懸臂回轉、懸臂俯仰和溜筒伸縮等不同的機構運動,除了溜筒可能與船艙、雨傘架等發生碰撞外,大車及懸臂也存在一定的碰撞隱患,特別是在無人化智能裝船系統中,需要整體考慮各部件的潛在碰撞風險。如何根據不同的碰撞情景,作出正確及時的安全預警和動作響應,合理設計碰撞情形下各運動機構的聯鎖控制機制,對于提高裝船機安全性能和工作效率具有重要意義。
激光雷達是一種先進感知硬件,具有探測范圍廣、分辨率高和抗干擾能力強等優勢,被廣泛應用于自動(輔助)駕駛、智能機器人和地形測繪等領域。因此提出基于激光雷達和智能數據處理技術的自動化裝船機防撞方案,可以實現裝船機工作時的全方位安全監控和防撞預警,旨在提高散貨裝船機的安全性和港口的運營水平。
2 設計方案
該移動可回轉式裝船機主要用于裝煤,裝船能力為1 500 t/h。有效工作運行距離約為±70 m,最大行走速度30 m/min;回轉范圍為-90°~90°,最大回轉速度0.5 r/min;俯仰角度0~30°,最大俯仰速度3.6 m/min;溜筒伸縮行程4.5 m,最大伸縮速度5 m/min。裝船機工作中,大車沿軌道方向行走,懸臂沿旋轉中心軸回轉或在鋼索牽引下小角度俯仰,溜筒則沿豎直方向伸縮。根據不同機構的運動特點,需要采取不同的雷達安裝方案,分別在大車4根立柱、懸臂兩側和溜筒上方共安裝7個半固態棱鏡架構激光雷達。
所安裝的激光雷達能以自身為頂點,向前方錐形空間內發射探測信號(激光束),接收目標反射回來的回波信號后,分析目標物體表面的反射能量大小、反射波譜的幅度、頻率和相位等信息,輸出3D點云數據。對于大車,安裝在前后4根立柱上的激光雷達能夠獲取行走軌道及其附近空間點云,可確保大車前進、后退路線附近空間的全方面監控;安裝在回轉平臺懸臂兩側的激光雷達能夠探測懸臂回轉及俯仰時附近空間點云,實現探測信號在懸臂運動維度內全覆蓋;安裝在溜筒上方平臺的激光雷達,可獲取溜筒筒身周圍及出口下方空間點云數據。該方案所采用的激光雷達及其安裝方案,具有根據特定防撞場景分機構停機的自適應功能,可以實現裝船機工作過程中所有運動機構的監控,避免無關機構停機影響機構壽命及生產運行效率,確保在所有潛在的碰撞風險中進行合理高效的安全預警、動作響應和多機構聯鎖控制。
3 智能防撞系統
3.1 大車防撞模塊
大車的防撞由點云數據獲取與重構、智能預警邏輯判斷、動作指令分發三大模塊組成,其基本實現邏輯見圖1。
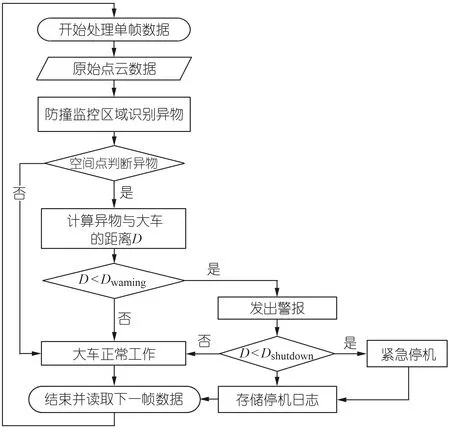
圖1 大車防撞功能實現邏輯
原始點云的獲取將根據實際運行需求調整識別區域,以剔除點云重構過程中的無效點云數據,從而減小點云數據量。應用濾波算法和法向量規則摳除背景,劃分出異物點云數據。為避免個別點云噪點對異物識別的判斷,將密度分簇算法用于處理異物點云數據,從而劃分出異物,如果識別存在異物則進入安全邏輯判斷。在安全邏輯判斷處理過程中,異物與大車之間的最小距離D被計算,用于判斷安全狀態,安全狀態包含正常、預警、緊急停機3種情況。
其對應的判斷規則為:D值將作為判別障礙物是否侵入到大車安全工作范圍的依據,若D大于預警距離Dwarning,則大車正常工作;若D小于Dwarning,預警系統發出響應指令,設備相應地發出警報和/或亮警報燈。
預警系統發出響應指令后會同步進行下一步判別:若D大于等于停機距離Dshutdown,則保持警報和警燈閃爍,大車仍正常工作;若D小于Dshutdown,則系統進入緊急停機狀態,機器緊急停機,并將程序識別的結果儲存,以便于工作人員快速排查障礙物。至此,一幀點云數據的處理分析與識別完成,程序自動調取下一幀原始點云數據,進入新一輪的循環并覆蓋上一幀指令,從而實現防撞模塊的連續運行。
3.2 懸臂防撞模塊
為實現懸臂防撞功能,需要對激光雷達掃描得到的原始數據進行逐步處理與分析,并在相應情況下實現障礙物識別,以及后續的預警響應。防撞功能基本實現邏輯見圖2。
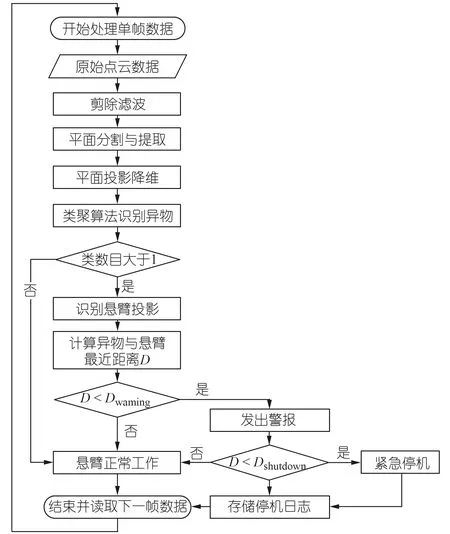
圖2 懸臂防撞功能實現邏輯
首先讀取雷達掃描得到的原始點云數據,再根據懸臂實際安全工作范圍對點云數據進行剪除濾波、扣除背景、劃分出防撞監控區域。由于懸臂工作時圍繞回轉基準軸轉動或小角度俯仰運動,即僅在接近與懸臂下平面平行的平面內運動,故對懸臂進行幾何特征識別,采用隨機抽樣一致算法實現下平面的分割與提取;隨后,將整個監控區域向該平面投影降維,此時懸臂應具有明顯完整輪廓,可采用類聚算法將其與障礙物的點云簇進行識別和區分。根據類聚算法結果,若返回類數目為1,表明只有懸臂投影存在,懸臂正常工作;若返回類數目大于1(即存在有不同于懸臂的其他障礙物的投影),則需根據與原點(激光雷達安裝位置)之間的特征關聯性識別出屬于懸臂投影的聚類。以距離特征為例,根據激光雷達安裝方案,懸臂應與雷達相距最近,從點云投影上看,懸臂點云簇與原點距離接近0,借此可以簡單識別出屬于懸臂本身的點云簇;再以懸臂投影為基準,計算其他障礙物投影到懸臂投影的最小距離D。
D值將作為判別障礙物是否侵入到懸臂安全工作范圍的依據:若D大于二級預警距離Dwarning,則懸臂正常工作;若D小于Dwarning,預警系統發出響應指令,設備相應地發出警報或亮警報燈。
防撞系統發出二級預警響應時,還需進行下一步判別:若D大于等于一級預警距離Dshutdown,則保持警報和警燈閃爍,但懸臂仍正常工作;若D小于Dshutdown,則系統進入一級預警狀態,機器緊急停機,并將程序識別的結果儲存,以便于工作人員快速排查障礙物。至此,一幀點云數據的處理分析與識別完成,程序自動調取下一幀原始點云數據,進入新一輪的循環并覆蓋上一幀指令,從而實現防撞模塊的連續運行。
3.3 溜筒防撞模塊
溜筒防撞功能目的是完成對船壁面、雨傘架等障礙物的識別,必要情況下對溜筒運動機構發出停機指令。基本實現邏輯見圖3。
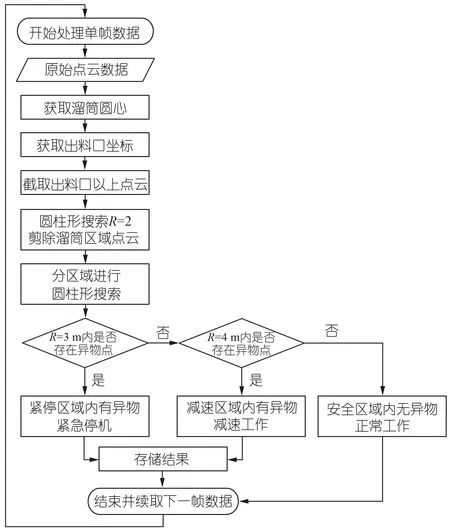
圖3 溜筒防撞功能實現邏輯
第一步,讀取雷達掃描得到的原始點云數據,通過對初始點云坐標變換以及編碼器數據完成溜筒出料口位置的實時定位;第二步,考慮到現場環境存在大量煤灰,原始點云數據中有大量噪點干擾,通過點云數據自帶的強度信息完成煤灰噪點的濾除;第三步,在已定位好的出料口圓心及已獲得溜筒工作區域的干凈點云基礎上,通過圓柱形搜索算法配合歐式聚類算法搜索溜筒周邊區域的點云,對于聚類成功的點云計算其位置及到溜筒的平面距離;第四步,根據異物點到溜筒的距離和位置,判斷是否發出對應機構的停機指令。
周邊點云的位置,以出料口圓心和半徑作為搜索依據,可分為3部分區域:安全區域(R>5 m)、減速區域(R=3~5 m)、急停區域(R<3 m)。如果急停區域存在異物的歐式類,則認為有異物進入溜筒工作區域,需要緊急停機;同時根據異物的歐式類平均坐標判斷異物方向。區域劃分見圖4,以溜筒中心為原點,平行懸臂方向作為y軸、垂直懸臂方向作為x軸共劃分為4個區域,檢測到不同區域的異物則停止對應的運動機構;例如異物平均坐標位于雷達坐標的象限1,則發出懸臂右擺及大車右行的停機指令。如果急停區域內沒有異物類,則繼續判斷異物類的位置;如果異物類在減速區域內,則發出減速提醒信號;如果異物類在安全區域則判斷當前溜筒可正常作業。
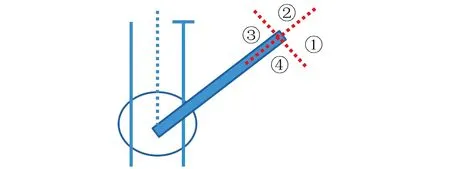
圖4 溜筒異物方向判斷示意圖
4 功能驗證
基于激光雷達的散貨裝船機智能防撞系統搭建分為硬件與軟件部分。硬件部分主要實現點云數據獲取和傳輸,軟件部分主要實現點云數據處理分析、防撞限位控制和信息顯示。數據處理分析和限位控制主要由數據處理服務器完成,防撞信息顯示主要由客戶端電腦完成。對硬件感知、數據處理、防撞判別響應、界面顯示的完整流程進行實際效果驗證,確保裝船機防撞功能穩定可靠運行。
大車根據行使方向調用行使方向上的2個激光雷達,激光雷達自主獲得點云數據進行判斷。監控范圍內出現障礙物時的點云數據和防撞識別結果見圖5,(a) 為監控范圍出現障礙物的點云圖;(b)為濾波、裁剪后的重構圖像;(c) 為經大車防撞程序處理后識別到障礙物。分別設置Dwarning和Dshutdown值為5 m和3 m,在大車作業過程中與模擬障礙物間距離達到相應預警值時,均能準確發出警報或者停機響應。
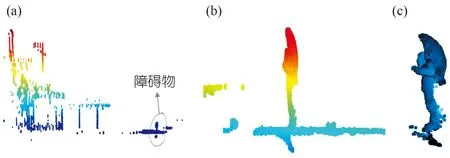
圖5 大車防撞效果(以前進為例)
懸臂總長度約21 m,寬度約4 m,高度約2.1 m(不包括溜筒),尾端與回轉機構連接處約3 m,故根據實際情況設置懸臂單側監控范圍為長18 m×寬9 m×高6 m,左右兩側激光雷達實現兩側監控范圍的覆蓋。監控范圍內出現障礙物時點云數據和防撞識別結果見圖6,(a) 為監控范圍出現障礙物的點云圖;(b) 為經懸臂防撞程序處理后識別到障礙物。分別設置Dwarning和Dshutdown值為4 m和2 m,在懸臂作業過程中與模擬障礙物間距離達到相應預警值時,均能準確發出警報或者停機響應。
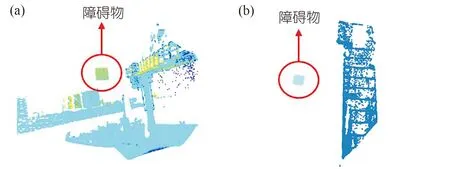
圖6 懸臂(左側)防撞效果
實時運行過程中,溜筒防撞某時間段在同一監控區域的識別結果見圖7(深色部分為識別的到點云)。對比以下3幅圖片,可以發現異物(船艙壁面)只有在搜索半徑5 m區域內能被搜索到,判定溜筒此時無碰撞風險,可以照常工作。
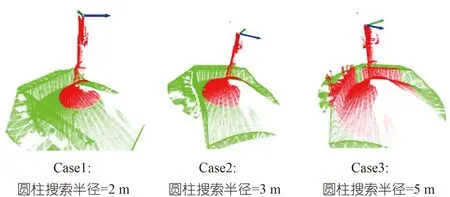
圖7 溜筒防撞程序識別的不同區域障礙物
客戶端界面主要由裝船機信息模塊、裝船泊位俯視模塊、船舶三維點云模塊和各機構防撞信息模塊組成。各機構防撞信息模塊劃分為大車左右行、懸臂左右擺和溜筒防撞,3類運動機構不同方向的防撞預警信息實時顯示;船舶三維點云模塊顯示裝船過程的實時三維點云圖;裝船泊位俯視模塊以俯視視角顯示溜筒與船艙的相對位置;裝船機信息模塊顯示裝船機位置的相關參數。此外,運行人員可自定義3類運動機構的防撞范圍、報警和限位停機距離。根據不同運動機構的防撞測試,主界面均能顯示相應的預警結果,界面顯示功能穩定可靠,該智能防撞系統取得了良好的實施效果。
5 結語
港口智能化是港口行業發展方向。基于激光雷達的散貨裝船機智能防撞系統綜合考慮大車、懸臂、溜筒等運動機構的潛在碰撞風險,借助先進激光雷達的高精度感知能力和智能數據處理程序的高效性,可為裝船機的安全可靠運行提供保障。