基于機(jī)器視覺的便攜式坐標(biāo)測(cè)量系統(tǒng)
2023-10-17 08:42:00王文濤孫鳳鳴
科技風(fēng) 2023年28期
關(guān)鍵詞:測(cè)量
康 新 劉 佳 王文濤 孫鳳鳴
1.中國(guó)民航大學(xué)中歐航空工程師學(xué)院 天津 300300;2.銳迪科微電子科技(天津)有限公司 天津 300300;3.上海飛機(jī)設(shè)計(jì)研究院 上海 201210
隨著機(jī)器視覺技術(shù)的飛速發(fā)展,機(jī)器視覺技術(shù)逐漸被應(yīng)用于工業(yè)生產(chǎn)的檢測(cè)環(huán)節(jié)。以光學(xué)靶標(biāo)式測(cè)量系統(tǒng)為代表的視覺測(cè)量系統(tǒng)在復(fù)雜三維場(chǎng)景的測(cè)量中逐步得到應(yīng)用,特別適用于測(cè)量異形結(jié)構(gòu)的孔間距、有間隔的幾何尺寸等復(fù)雜結(jié)構(gòu),在某些場(chǎng)合下相對(duì)于不便移動(dòng)的三坐標(biāo)測(cè)量機(jī)具有一定的優(yōu)勢(shì)[1]。國(guó)外相關(guān)機(jī)構(gòu)對(duì)該項(xiàng)技術(shù)進(jìn)行了深入研究,并開始應(yīng)用在汽車和飛機(jī)等先進(jìn)制造領(lǐng)域。目前,國(guó)外的相關(guān)產(chǎn)品價(jià)格昂貴,而國(guó)內(nèi)受限于技術(shù)水平尚未取得突破性進(jìn)展。因此,本文深入研究光學(xué)標(biāo)靶式測(cè)量系統(tǒng)的核心技術(shù),從而設(shè)計(jì)出一套測(cè)量較為準(zhǔn)確的光學(xué)靶標(biāo)式測(cè)量系統(tǒng)。
1 硬件系統(tǒng)設(shè)計(jì)
本文中的光學(xué)靶標(biāo)式測(cè)量系統(tǒng)由光學(xué)靶標(biāo)、相機(jī)以及計(jì)算機(jī)這三部分構(gòu)成。光學(xué)靶標(biāo)主要由主體、測(cè)頭探針以及二者的連接部分所組成,用于定位樣品待測(cè)部位。雙目視覺相機(jī)用于采集光學(xué)靶標(biāo)上的特征點(diǎn),計(jì)算機(jī)用于解算光學(xué)靶標(biāo)上探針與樣品接觸部位的空間坐標(biāo)。光學(xué)靶標(biāo)整體系統(tǒng)如圖1所示。

圖1 光學(xué)靶標(biāo)系統(tǒng)圖
1.1 光學(xué)靶標(biāo)設(shè)計(jì)
光學(xué)靶標(biāo)在標(biāo)定和使用過(guò)程中被認(rèn)為是一個(gè)理想的剛體結(jié)構(gòu)。我們假定靶標(biāo)上各標(biāo)志點(diǎn)間、標(biāo)志點(diǎn)與測(cè)頭探針間的相對(duì)位置恒定不變,則選擇較高剛度、較小熱膨脹系數(shù)和密度較小的碳纖維板材作為靶標(biāo)的主體材料。測(cè)頭探針既要保證工作在彈性范圍內(nèi),又要達(dá)到一定的剛度。綜合考慮后,測(cè)頭探針的頭部采用紅寶石球形探針,通過(guò)碳纖維桿與光學(xué)靶標(biāo)固連。
1.2 回光反射標(biāo)志選擇與設(shè)計(jì)
光學(xué)靶標(biāo)上的標(biāo)志點(diǎn)的中心坐標(biāo)提取,對(duì)測(cè)量精度有較大影響。目前多為發(fā)光標(biāo)志點(diǎn),可以在光照度較小時(shí)進(jìn)行工作,但對(duì)其中心坐標(biāo)提取算法有較高要求。本文采用圓形回光反射編碼標(biāo)志點(diǎn),其光照適應(yīng)度較弱,但是中心提取算法精度較高和特征點(diǎn)匹配準(zhǔn)確的特點(diǎn),可以適用于室內(nèi)測(cè)量場(chǎng)合。中心圓點(diǎn)周圍的編碼環(huán)10等分,每一個(gè)等分區(qū)域根據(jù)是否填充反光材料而形成不同的亮度區(qū)域,而得到逆時(shí)針順序的10位二進(jìn)制編碼,具有編碼的特點(diǎn)更利于其后續(xù)視覺檢測(cè)方法中的特征點(diǎn)匹配。
2 標(biāo)志點(diǎn)定位與空間坐標(biāo)解算
2.1 利用橢圓擬合法提取標(biāo)志點(diǎn)中心坐標(biāo)
標(biāo)志點(diǎn)經(jīng)相機(jī)投影一般呈現(xiàn)橢圓特征。本文采用橢圓擬合法[2]提取標(biāo)志點(diǎn)的橢圓特征中心坐標(biāo),分為兩個(gè)步驟:首先,識(shí)別并提取橢圓或圓邊緣像素點(diǎn)。邊緣是指圖像中局部灰度值呈現(xiàn)階梯變化或屋頂變化的像素的合集[3],常用的邊緣檢測(cè)算子有Roberts算子、Sobel算子和Canny算子等。其次,通過(guò)對(duì)邊緣像素點(diǎn)進(jìn)行橢圓擬合獲得橢圓的中心坐標(biāo)。利用圖像邊緣檢測(cè)算法獲得邊緣像素點(diǎn)的集合后,根據(jù)最小二乘橢圓擬合,確定橢圓特征的中心坐標(biāo)。平面橢圓的一般方程如下:
Ax2+Bxy+Cy2+Dx+Ey+F=0
(1)
可將上述方程進(jìn)行線性簡(jiǎn)化為最小二乘問題。
LX=[x2xyy2xy1]
X=[ABCDEF]T
(2)
將組成的橢圓輪廓的N個(gè)邊緣像素點(diǎn)坐標(biāo)代入上式,可以得到該橢圓輪廓的線性方程組,將‖X‖2=1作為約束條件引入,轉(zhuǎn)化為最優(yōu)化問題如下:
minLNX2s.t.X2=1
(3)
通過(guò)高斯—牛頓法等迭代方法可以求解式(3)獲得橢圓系數(shù)X的最優(yōu)解[4]。根據(jù)最優(yōu)解,再通過(guò)如下的橢圓中心計(jì)算公式,便可以求得橢圓或圓的圖像中心坐標(biāo)。
(4)
2.2 解算空間點(diǎn)的三維坐標(biāo)
利用雙目相機(jī)解算光學(xué)靶標(biāo)上的回光反射式編碼標(biāo)志中心坐標(biāo),并對(duì)編碼環(huán)進(jìn)行解碼獲得碼值。通過(guò)碼值可完成左右圖像中對(duì)應(yīng)標(biāo)志點(diǎn)的匹配,進(jìn)而利用雙目立體視覺原理解算出標(biāo)志點(diǎn)在相機(jī)坐標(biāo)系下的空間三維坐標(biāo)。
2.3 轉(zhuǎn)站測(cè)量方法
當(dāng)相機(jī)站位發(fā)生改變后,勢(shì)必造成轉(zhuǎn)站前后測(cè)量空間坐標(biāo)系的割裂,因此需要一個(gè)參照物體,通過(guò)在不同站位提取特征進(jìn)行匹配,建立起相機(jī)站位間的相對(duì)位姿關(guān)系,實(shí)現(xiàn)各測(cè)量站位到參考站位的統(tǒng)一。本文設(shè)計(jì)的參考定位靶標(biāo)便是起到這一作用,基于參考定位靶標(biāo)的相機(jī)轉(zhuǎn)站測(cè)量原理如圖2所示。

圖2 基于參考定位靶標(biāo)的相機(jī)轉(zhuǎn)站測(cè)量原理
當(dāng)完成了第一個(gè)相機(jī)站位下測(cè)量區(qū)域內(nèi)的測(cè)量工作后,將參考定位靶標(biāo)置于當(dāng)前相機(jī)站位的視場(chǎng)內(nèi),通過(guò)雙目立體視覺原理對(duì)靶標(biāo)上第j個(gè)棋盤格角點(diǎn)進(jìn)行測(cè)量,獲得當(dāng)前站位Oc1-Xc1Yc1Zc1下的棋盤格角點(diǎn)坐標(biāo):

(5)
通過(guò)奇異值分解法,可以解算出相機(jī)坐標(biāo)系到參考坐標(biāo)系的旋轉(zhuǎn)矩陣Rc1r與平移向量Tc1r。通過(guò)求得的姿態(tài)關(guān)系,便可以將相機(jī)站位1下的測(cè)量結(jié)果變換到參考坐標(biāo)系中。
為了測(cè)量站位1無(wú)法觀察到的測(cè)量區(qū)域,在保證參考定位靶標(biāo)始終在相機(jī)視場(chǎng)內(nèi)的情況下移動(dòng)至站位2,設(shè)該站位下相機(jī)坐標(biāo)系為Oc2-Xc2Yc2Zc2,通過(guò)雙目立體視覺原理測(cè)量棋盤格的角點(diǎn)坐標(biāo):
(6)
與站位1同理,可以解算出站位2相機(jī)坐標(biāo)系到參考坐標(biāo)系的旋轉(zhuǎn)矩陣Rc2r與平移向量Tc2r,將相機(jī)站位2下的測(cè)量結(jié)果變換至參考坐標(biāo)系中。無(wú)論相機(jī)站位如何,均可以將測(cè)量結(jié)果變換至參考坐標(biāo)系,實(shí)現(xiàn)測(cè)量點(diǎn)坐標(biāo)的統(tǒng)一。
3 系統(tǒng)標(biāo)定和測(cè)量實(shí)驗(yàn)
3.1 相機(jī)標(biāo)定實(shí)驗(yàn)
本文首先采用張氏棋盤格標(biāo)定法[5]分別對(duì)左右相機(jī)進(jìn)行單目標(biāo)定,得到左右兩個(gè)相機(jī)的內(nèi)外參數(shù),將其作為相機(jī)的初次標(biāo)定結(jié)果。其次,根據(jù)相機(jī)的初次標(biāo)定結(jié)果,以組為單位,分別計(jì)算左、右相機(jī)圖片中棋盤格角點(diǎn)的重投影誤差均值。再次,從采集到的40組匹配圖像中,挑選20組重投影誤差最小的圖片。最后,利用這20組圖片重新對(duì)雙目相機(jī)進(jìn)行標(biāo)定,得到更為準(zhǔn)確的相機(jī)內(nèi)外參數(shù)。
結(jié)果表明,二次標(biāo)定可以通過(guò)摒棄成像質(zhì)量較差的圖片獲得更加穩(wěn)定的標(biāo)定結(jié)果。圖3為每個(gè)棋盤格角點(diǎn)重投影誤差分布圖,結(jié)果較為穩(wěn)定。

3.2 光學(xué)靶標(biāo)聯(lián)合標(biāo)定實(shí)驗(yàn)
本文采用的光學(xué)靶標(biāo)聯(lián)合標(biāo)定方法將同時(shí)進(jìn)行標(biāo)志點(diǎn)自標(biāo)定和探針測(cè)頭中心位置標(biāo)定,通過(guò)探針測(cè)頭中心位置標(biāo)定的圖像可實(shí)現(xiàn)回光標(biāo)志點(diǎn)自標(biāo)定。
首先,采集測(cè)頭探針中心的標(biāo)定圖像,將光學(xué)靶標(biāo)的球形探針置于位置固定的錐孔中,旋轉(zhuǎn)傾斜靶標(biāo),使用雙目相機(jī)獲得不同姿態(tài)下的15組靶標(biāo)圖像。其次,進(jìn)行標(biāo)志點(diǎn)自標(biāo)定,使用橢圓擬合法獲取每對(duì)圖像中標(biāo)志點(diǎn)中心的圖像坐標(biāo)。再次,對(duì)15組標(biāo)志點(diǎn)的圖像進(jìn)行碼值匹配獲得15組標(biāo)志點(diǎn)坐標(biāo)集,其中每組坐標(biāo)集包含7個(gè)回光標(biāo)志點(diǎn)的空間三維坐標(biāo)。最后,計(jì)算每組坐標(biāo)集的重投影誤差,選擇重投影誤差均值最小的坐標(biāo)集作為光學(xué)靶標(biāo)標(biāo)志點(diǎn)自標(biāo)定的結(jié)果。標(biāo)志點(diǎn)空間三維坐標(biāo)如表1所示。

表1 光學(xué)靶標(biāo)坐標(biāo)系下標(biāo)志點(diǎn)空間三維坐標(biāo)(mm)
然后,根據(jù)坐標(biāo)集建立方程組,求解探針測(cè)頭中心的空間坐標(biāo)。每一個(gè)標(biāo)志點(diǎn)在不同靶標(biāo)姿態(tài)下的空間坐標(biāo)可以解算出一個(gè)探針測(cè)頭中心坐標(biāo),7個(gè)標(biāo)志點(diǎn)共可以解算出7個(gè)探針測(cè)頭中心坐標(biāo),取均值作為探針測(cè)頭標(biāo)定結(jié)果。重復(fù)進(jìn)行上述實(shí)驗(yàn),結(jié)果如表2所示。
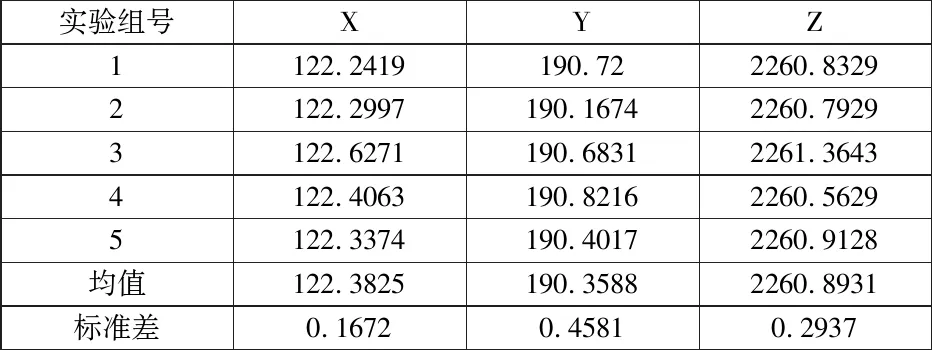
表2 探針測(cè)頭中心位置標(biāo)定結(jié)果(mm)
3.3 平面測(cè)量實(shí)驗(yàn)
可以通過(guò)平面測(cè)量實(shí)驗(yàn)來(lái)驗(yàn)證本文方法的有效性。首先,將測(cè)頭探針與標(biāo)準(zhǔn)平面充分接觸,均勻移動(dòng)靶標(biāo)并拍攝多張不同姿態(tài)的靶標(biāo)圖像。根據(jù)上文方法來(lái)獲得各個(gè)靶標(biāo)姿態(tài)下的測(cè)頭球形探針中心坐標(biāo),作為標(biāo)準(zhǔn)平面采樣點(diǎn)數(shù)據(jù)。然后根據(jù)測(cè)量得到的采樣點(diǎn)數(shù)據(jù),通過(guò)最小二乘評(píng)定法擬合最小二乘平面。平面的一般方程如下:
p=au+bv+c
(7)
根據(jù)采樣點(diǎn)數(shù)據(jù),進(jìn)行平面擬合,目標(biāo)函數(shù)定義為:
(8)
最小化目標(biāo)函數(shù),滿足條件:
(9)
展開并化簡(jiǎn)得出矩陣形式的方程組如下所示:
(10)
根據(jù)上式求出對(duì)應(yīng)的平面系數(shù),并以最小二乘平面作為評(píng)定基準(zhǔn)面,以平行于最小二乘平面,且具有最小歐式距離的兩包容平面間的距離作為平面度誤差值。采樣點(diǎn)到最小二乘平面的距離公式如下:
(11)
由此平面度誤差的最小二乘評(píng)定法結(jié)果為:
σ=max(di)-min(di)
(12)
根據(jù)上面的方法,對(duì)機(jī)加工制作的標(biāo)定輔件上的平面進(jìn)行采樣測(cè)量,并擬合平面參數(shù)得到擬合后的平面方程為:
p=3.8603u-421.6624v+81935.9099
(13)
采樣點(diǎn)在擬合得到的最小二乘平面上下均有分布。按照最小二乘評(píng)定法,選取與最小二乘平面平行的上下包容平面,計(jì)算得到平面度誤差為:
σ=0.0540-(-0.0449)=0.0989mm
(14)
圖4為平面度測(cè)量實(shí)驗(yàn)結(jié)果,展示了測(cè)頭球心坐標(biāo)擬合出的平面及側(cè)視結(jié)果。以上實(shí)驗(yàn)結(jié)果表明本文的測(cè)量系統(tǒng)能夠有效評(píng)定平面度的誤差。

圖4 平面度測(cè)量實(shí)驗(yàn)結(jié)果
4 總結(jié)
本文介紹了光學(xué)靶標(biāo)式測(cè)量系統(tǒng)的系統(tǒng)組成、設(shè)計(jì)選型和基本解算實(shí)現(xiàn);采用了一種回光編碼標(biāo)志點(diǎn),能夠?qū)崿F(xiàn)準(zhǔn)確的標(biāo)志點(diǎn)中心提取和特征點(diǎn)匹配;設(shè)計(jì)了一種標(biāo)志點(diǎn)和測(cè)頭球形中心坐標(biāo)的聯(lián)合標(biāo)定流程,以實(shí)現(xiàn)光學(xué)靶標(biāo)的快速準(zhǔn)確標(biāo)定。最后,根據(jù)平面測(cè)量實(shí)驗(yàn)驗(yàn)證了系統(tǒng)的有效性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00