雷達自適應動目標顯示濾波器性能對比*
2023-10-10 02:48:50陳元杰
艦船電子工程 2023年6期
關鍵詞:模型
李 沙 陳元杰 蔣 俊
(1.武漢船舶職業(yè)技術學院 武漢 430033)(2.中國人民解放軍91843部隊 廈門 361003)(3.海軍工程大學電子工程學院 武漢 430033)
1 引言
運動目標顯示(Moving Target Indication,MTI)是現(xiàn)代雷達必須完成的功能之一,當前的MTI技術主要面臨雜波抑制與慢動目標檢測之間的矛盾[1]。傳統(tǒng)的MTI 技術主要利用二/三次對消器來實現(xiàn)靜止雜波的抑制,其目的是消除頻率中心為0 的固定雜波。這種抑制方式實現(xiàn)簡單,但對具有一定多普勒頻率的雜波,如海雜波,氣象雜波效果較差。為了更好地消除這種頻率中心不斷改變的雜波,一般采用自適應動目標顯示(Adaptive Moving Target Indication,AMTI)技術。將自回歸(Auto Regressive,AR)模型與FIR 濾波器進行等效,經過Yule-Walker 方程可推導出以最小均方(Least Mean Square,LMS)算法為優(yōu)化準則的AMTI濾波器,在此基礎上進一步發(fā)展出基于遞歸最小二乘(Recursive Least Square,RLS)算法的AMTI濾波器[4]。
然而,在目前公開發(fā)表的文獻中,并未發(fā)現(xiàn)對這兩種AMTI的實測數(shù)據(jù)分析。它們中哪個有更好的慢動目標檢測能力和運動雜波抑制能力,值得深入研究。
本文利用AN/TPS-70 對海警戒雷達仿真數(shù)據(jù)與海軍航空大學“雷達對海探測數(shù)據(jù)共享計劃”公開發(fā)布分享的X 波段固態(tài)全相參雷達實測海雜波數(shù)據(jù)[3],驗證了AMTI濾波器的有效性,并對其性能進行了對比。通過實測數(shù)據(jù)發(fā)現(xiàn):AMTI 普遍比傳統(tǒng)MTI 濾波器有更好的雜波抑制效果,且在5 級海況以下,由于海雜波的非奇異性,LMS-MTI 及其遞歸實現(xiàn)算法對海雜波的抑制效果強于RLS-MTI。
2 基于LMS的MTI濾波器
傳統(tǒng)多脈沖對消器的結構與幅頻特性如圖1所示。這是典型的FIR 數(shù)字濾波器,隨著階數(shù)的增高,其阻帶逐漸變寬,對靜止目標的抑制性能提高,同時降低了慢動目標的檢測效果,對具有一定移動速度的雜波無法有效抑制,對速度較小的目標無法有效檢測。
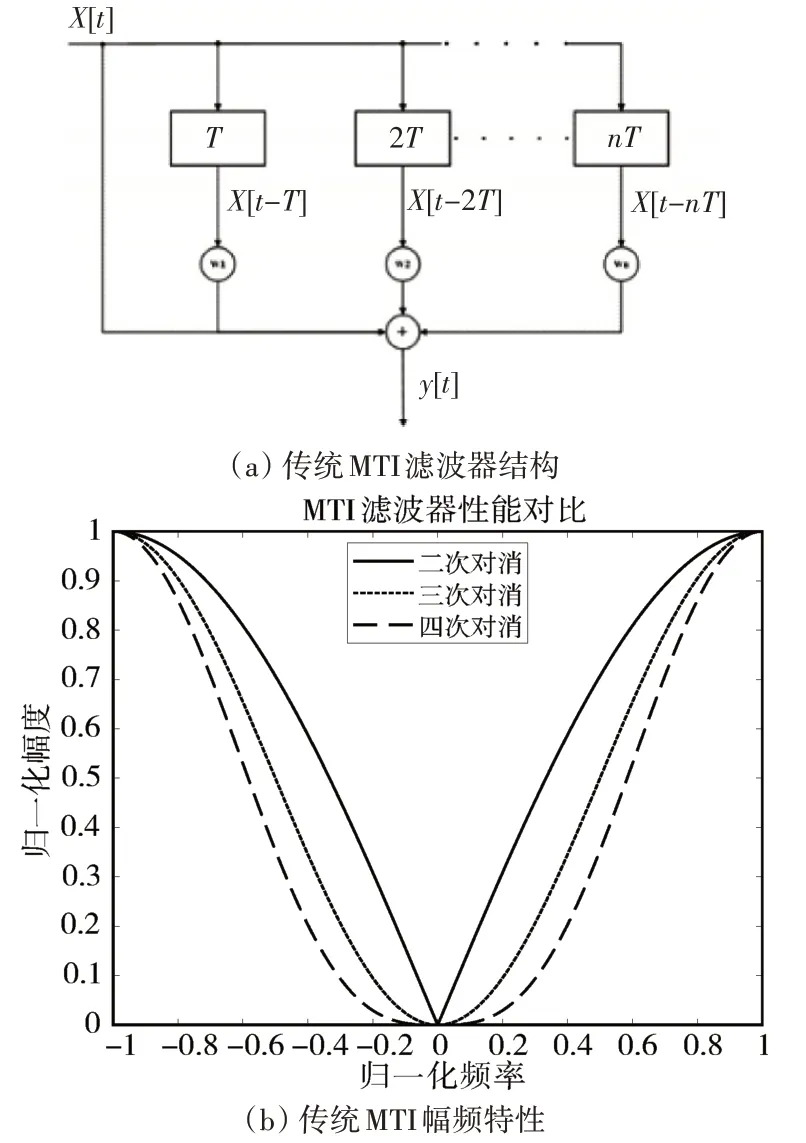
圖1 經典MTI濾波器
在雷達裝備實際工作中,單個脈沖中雜波能量遠大于目標與噪聲。基于LMS 準則的自適應濾波理論認為當濾波器權系數(shù)最佳時,雜波被大量濾除,輸出主要為有用信號分量。由于脈沖能量主要由雜波能量決定,因此只要保證輸出功率E[y2(n)]最小,就能使信雜比SCR(Signal Clutter Ratio,SCR)達到最大。該濾波過程可等效為AR 過程發(fā)生器或線性預測過程,其傳遞函數(shù)為全極點模型。利用X(t-T),X(t-2T),...X(t-nT)估計X(t),使其最接近,從而達到最小。
2.1 LMS線性預測模型
基于LMS 準則的線性預測模型如圖2所示,在此假設該線性預測器為p階濾波器。
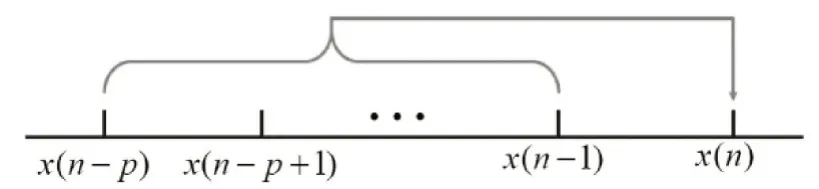
圖2 p階線性預測濾波器
對該濾波器,設有
式中rx(·)為輸入信號的自相關系數(shù),R為自相關矩陣,α為系數(shù)矢量,r為互相關矢量。該式即為AMTI 濾波器中的維納-霍夫(Wiener-Hopf,W-H)方程,亦等效為AR 模型的尤爾-沃克(Yule-Walk,YW)方程。
2.2 LMS-MTI濾波器的遞歸實現(xiàn)
由式(4)可知,基于最小功率的MTI 本質上就是以最小均方誤差為準則的線性估計問題。然而對于m階矩陣,直接求逆在最差的情況下運算量可能會達到[2(m-1)m]m,這在實際裝備中是需要極力避免的,因此一般采用最陡下降法迭代來逼近最優(yōu)解,即沿著梯度下降的方向搜索最優(yōu)權系數(shù)[5]:
式中μ為超參數(shù)搜索步長,為使結果收斂一般取,?為一階求導符號。
將式(3)~(4)聯(lián)立,可得
式中ρmin為線性預測模型的最小均方誤差,上標H表示共軛轉置。將式(5~6)聯(lián)立,可得:
在實際應用中,利用瞬時值代替集平均值,令
可得
其結構如圖3所示。
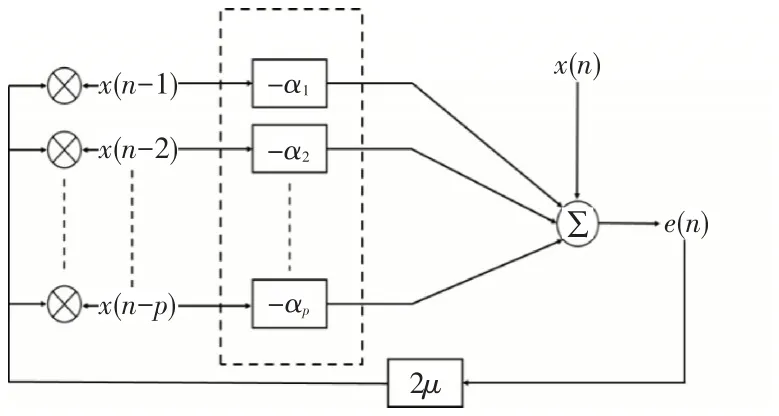
圖3 LMS-MTI濾波器結構
3 基于RLS的MTI濾波器
3.1 RLS線性預測模型
LMS線性預測模型是基于最小均方準則的,其推導基于集平均值,更適用于一類數(shù)據(jù);而RLS 線性預測模型以最小二乘為準則,適用于本組數(shù)據(jù)[8]。在此假設該線性預測期為p 階濾波器,其數(shù)據(jù)開窗方式采用前開窗法,如圖4所示。
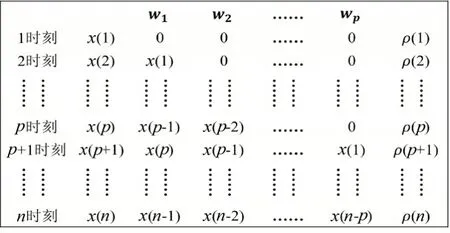
圖4 RLS濾波器數(shù)據(jù)前開窗法
對于RLS線性預測濾波器,設有
式中?(l,k)與z(-k)代表輸入信號時間平均自相關與時間平均互相關,該公式表明圖4 中每個濾波器權重下的數(shù)據(jù)向量與右側誤差序列向量正交。將上式以矩陣形式表示,可得:
式中Φ 為時間平均自相關矩陣,w為濾波器權值,z為時間平均互相關矢量。
為方便計算,根據(jù)線性代數(shù)理論,定義數(shù)據(jù)矩陣:
則有
將式(16)與式(13)聯(lián)立,可得:
該式即為基于最小二乘準則的濾波器權值推導公式,該濾波器的求解涉及矩陣的廣義逆求解等步驟。
3.2 RLS-MTI濾波器的遞歸實現(xiàn)
式(17)的算法復雜度大于O[(N-1)3],與LMS-MTI 類似,實際裝備中要避免矩陣求逆的操作[5],所以一般使用遞歸的方式逼近最優(yōu)解,在此給出遞推公式。
利用矩陣求逆引理
聯(lián)立式(18~19)可得RLS-MTI 濾波器遞歸公式:
式中g(n)為增益向量,C(n)=Φ-1(n)為逆相關矩陣。在RLS-MTI 濾波系統(tǒng)進行初始化時,一般令w(n)=0C(0)=δ-1Ι,其中δ為足夠小的正數(shù),用以正則化,其選值與SCR 有關,Ι為單位陣。其結構如圖5所示。
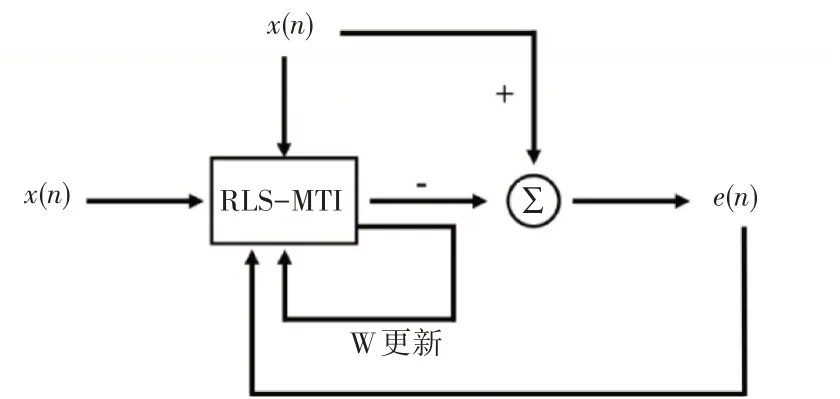
圖5 RLS-MTI濾波器結構
4 仿真數(shù)據(jù)與實測數(shù)據(jù)分析
本節(jié)通過仿真數(shù)據(jù)與實測數(shù)據(jù)評估第2、3 節(jié)中結論的有效性,并對LMS-MTI 和RLS-MTI 的性能進行對比。
4.1 仿真數(shù)據(jù)分析
仿真數(shù)據(jù)為美國AN/TPS-70對海警戒雷達,其I/Q 通道雜波振幅服從高斯分布,模值服從瑞利分布。根據(jù)其相關參數(shù)[6],設定工作環(huán)境為濱海探測,海況為均勻海況。具體回波數(shù)據(jù)和目標信息如表1和表2所示。
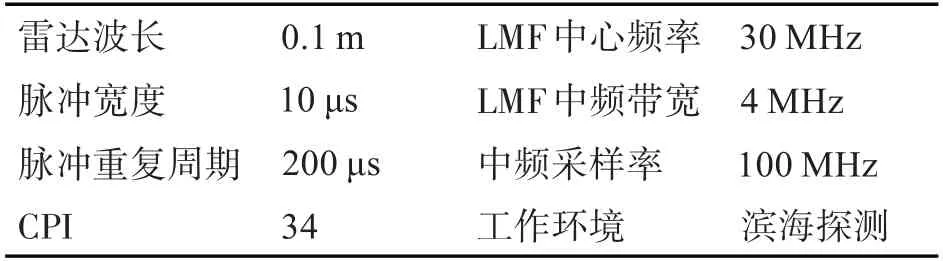
表1 AN/TPS-70回波信號參數(shù)
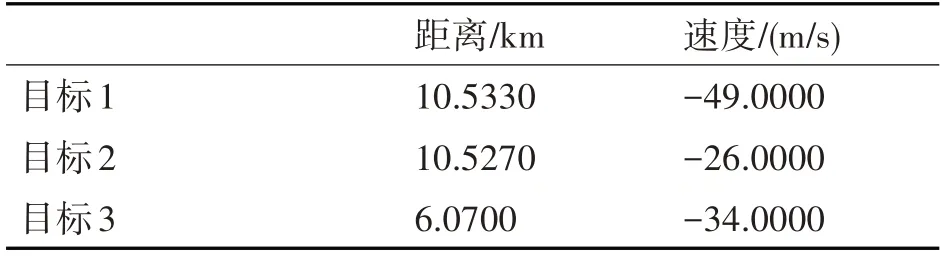
表2 目標信息
針對包含目標回波的仿真數(shù)據(jù),采取MTI改善因子I作為雜波抑制優(yōu)劣的指標,其定義為[7]
式中SCRo表示經過雜波抑制濾波器后的信雜比,SCRi表示未經過MTI/AMTI 濾波器時的信雜比。對34 組經過脈沖壓縮后的回波,分別進行傳統(tǒng)三脈沖對消、遞歸LMS-MTI、以及RLS-MTI 處理,其濾波結果如圖6所示,對AMTI 各距離單元濾波參數(shù)取平均后,得到其幅頻特性曲線如圖7所示。具體數(shù)據(jù)如表3所示,以上濾波器均為三階FIR系統(tǒng)。
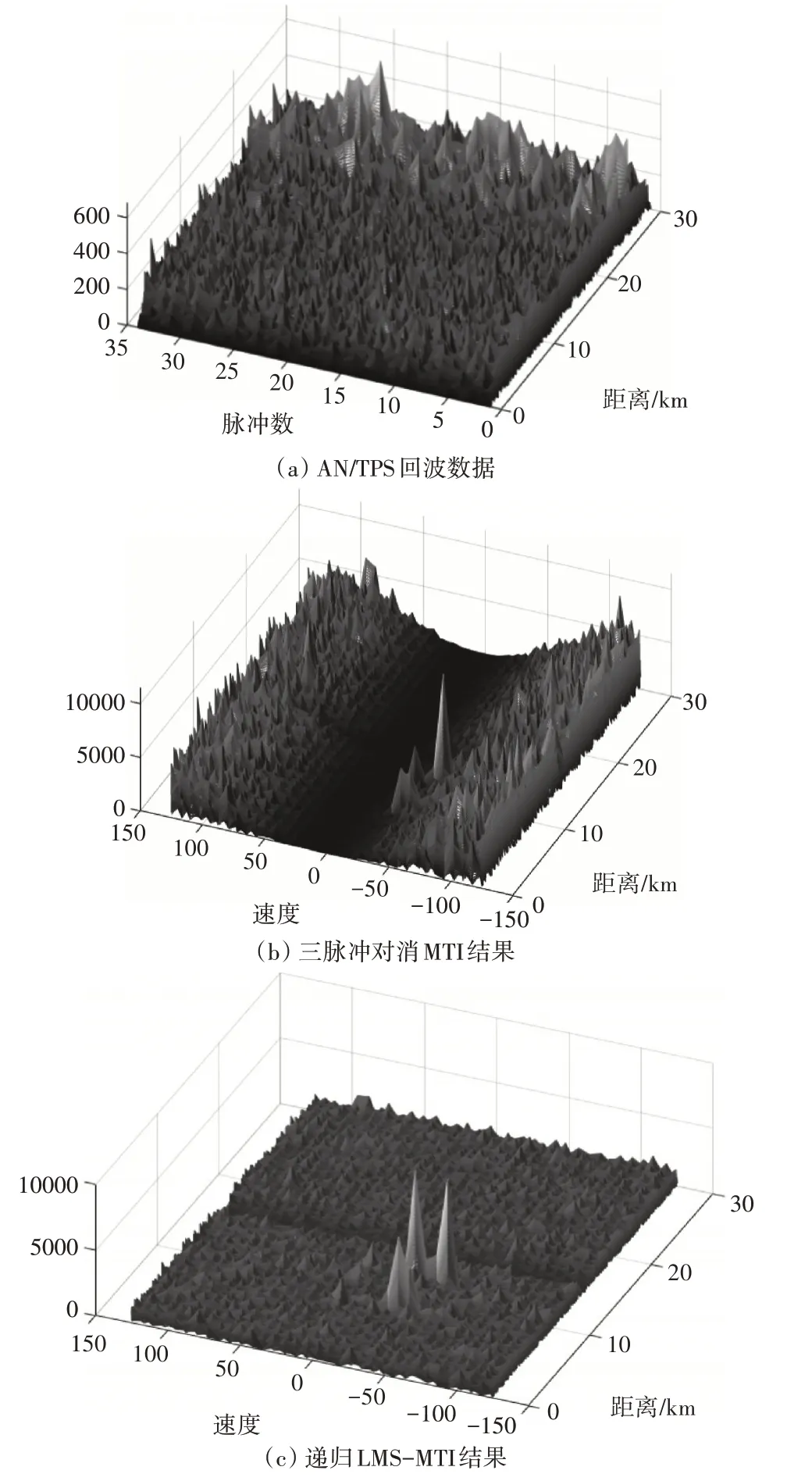

圖6 仿真數(shù)據(jù)AMTI實驗結果
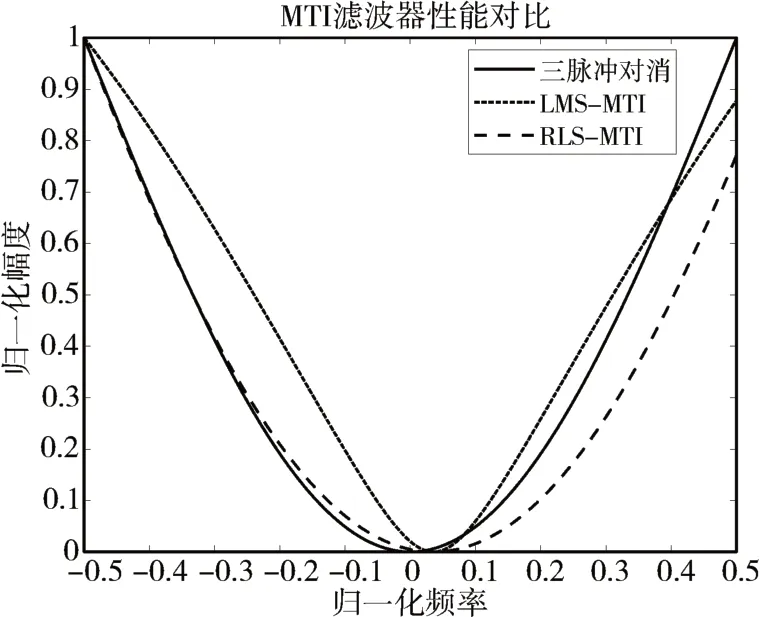
圖7 仿真數(shù)據(jù)AMTI幅頻特性曲線
由圖6 以及表3 結果可看出,傳統(tǒng)三脈沖對消器會完全抑制多普勒頻移為0 的信號,對慢速運動目標的檢測性能不好,無法抑制運動雜波并且改善因子較低。AMTI濾波器可以自動將凹口對準雜波多普勒值,自動調整濾波器各延遲線的權值,使輸出信號中雜波的成分最小,在抑制運動雜波的同時盡可能的提升信噪比。
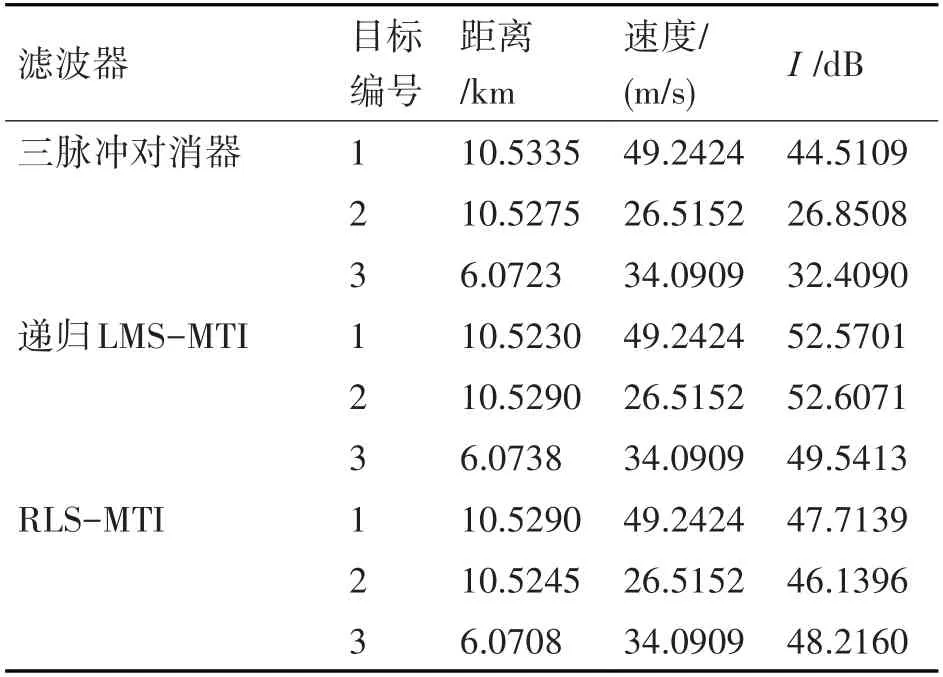
表3 仿真數(shù)據(jù)AMTI濾波性能
由圖7 及表3 結果,可知在AMTI 系統(tǒng)中,基于LMS 算法的MTI 濾波器可達到最好的運動目標檢測效果。LMS相較于RLS的濾波器凹口更準確,并且對非雜波頻率的信號有更高的幅頻響應。遞歸實現(xiàn)的自適應MTI對硬件要求更低,適用于實際裝備,靜止目標在遞歸實現(xiàn)的自適應MTI系統(tǒng)中不會被完全抵消掉。在雜波環(huán)境均勻的情況下,LMS準則相較于RLS 準則更加適合用來進行AMTI 的設計。
4.2 實測數(shù)據(jù)分析
實測數(shù)據(jù)來源于海軍航空大學“雷達對海探測數(shù)據(jù)共享計劃”第一批公開發(fā)表的X波段固態(tài)全相參雷達對海數(shù)據(jù)(本批數(shù)據(jù)主要為海雜波測量數(shù)據(jù),無合作船只,雷達視野中有四個航道浮標)[3]。該實測數(shù)據(jù)獲取時間為2019年10月12日上午11時,實驗地點為山東省煙臺市養(yǎng)馬島,距離海邊的直線距離約50m,海拔高度約30m,雷達對海視野范圍約180°,可測得明顯海雜波數(shù)據(jù)的擦地角范圍約為0.3°~15°,當日海況等級為3 級~4 級,其實驗位置與雷達顯控截圖如圖8所示。
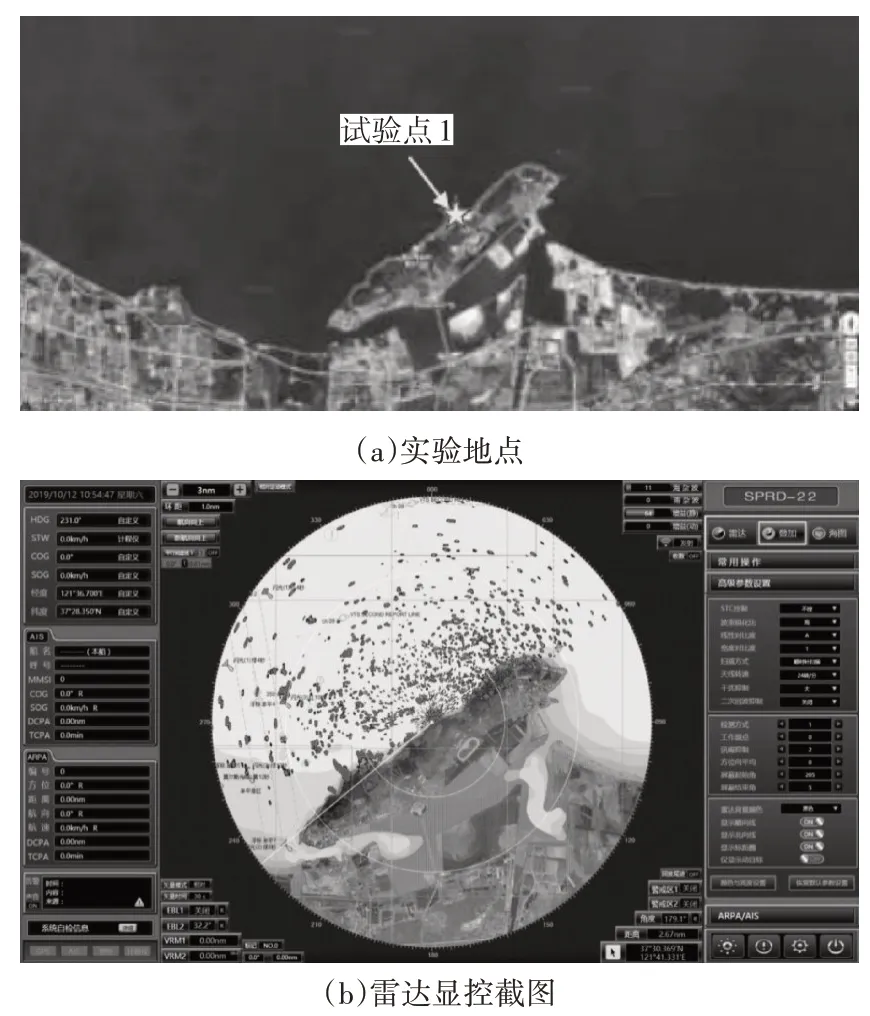
圖8 雷達對海探測數(shù)據(jù)采集現(xiàn)場
試驗用X波段固態(tài)全相參雷達工作參數(shù)如表4所示,經雷達地理坐標、凝視方位角與當日AIS 信息比對,在本次實驗所用數(shù)據(jù)中無合作目標,即可認為當前場景信號由海雜波與噪聲組成,因此使用雜波衰減度CA作為雜波抑制能力的性能指標[7]。
雜波衰減度的定義為[7]
式中Ci為雜波經過MTI 濾波器之前的功率,Co為雜波經過MTI濾波器之后的功率。
針對本組實測對海探測數(shù)據(jù),分別進行傳統(tǒng)三脈沖對消、遞歸LMS-MTI、以及RLS-MTI 處理,其雜波抑制結果如圖9所示,集總平均后的濾波器頻響效應如圖10所示,具體濾波性能如表5所示,以上濾波器均為三階FIR系統(tǒng)。
通過對實測回波數(shù)據(jù)的分析處理,可從圖9、圖10 及表5 中發(fā)現(xiàn),針對多普勒頻率中心不全為0的海雜波,AMTI 普遍比MTI 有明顯的雜波抑制效果;在5 級以下海況時,由于海雜波的非奇異性,LMS-MTI濾波器相較于RLS-MTI濾波器能夠獲得更高的雜波衰減度,LMS-MTI 在將凹口對準海雜波頻率的同時,比RLS-MTI有更強的幅頻特性。
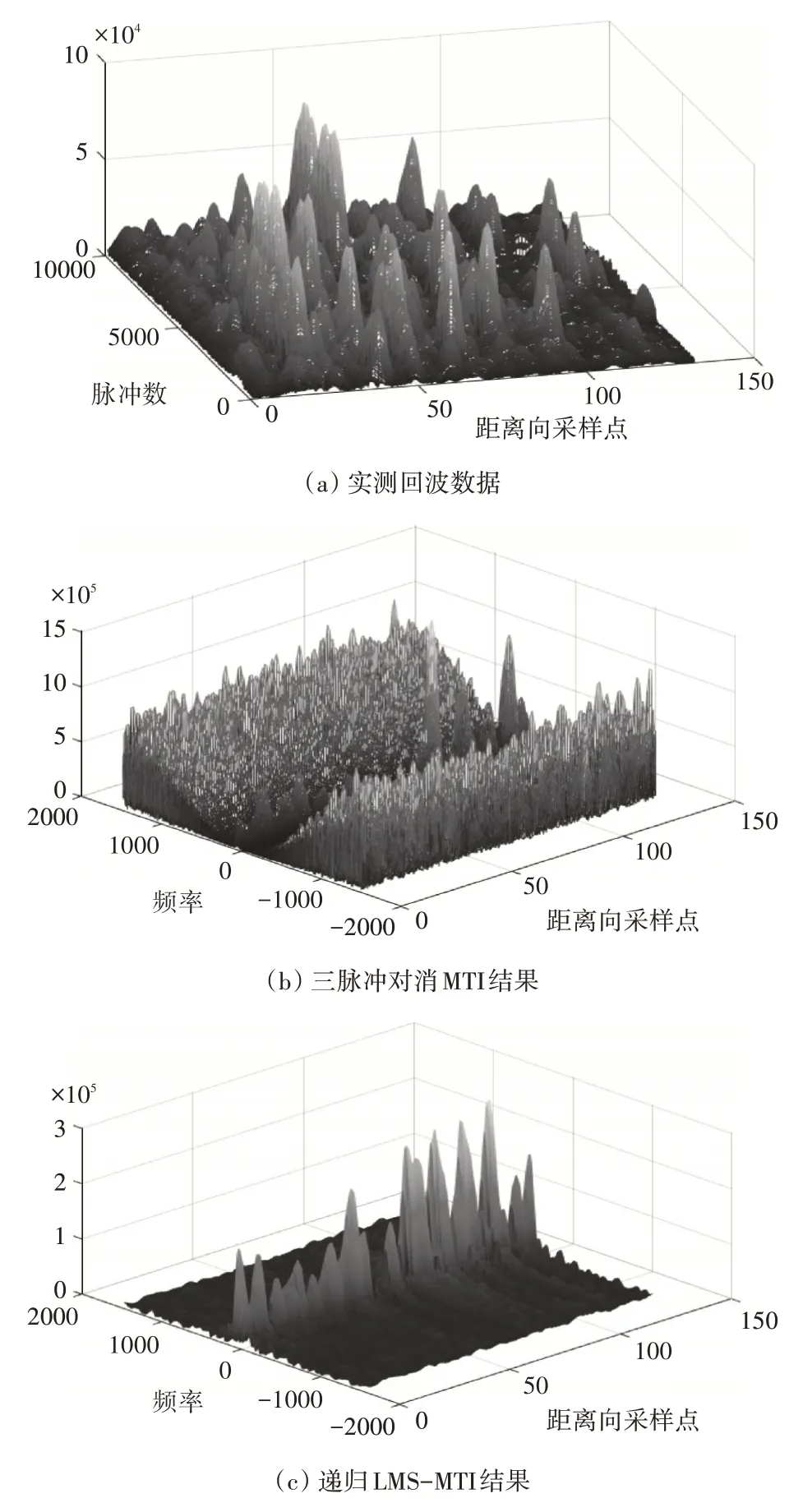
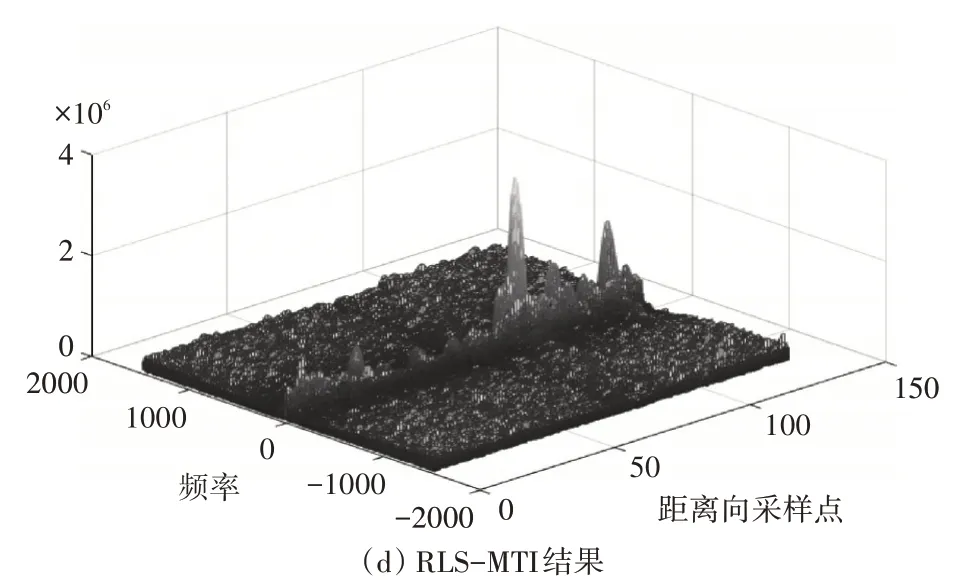
圖9 實測數(shù)據(jù)AMTI實驗結果

圖10 實測數(shù)據(jù)AMTI幅頻特性曲線
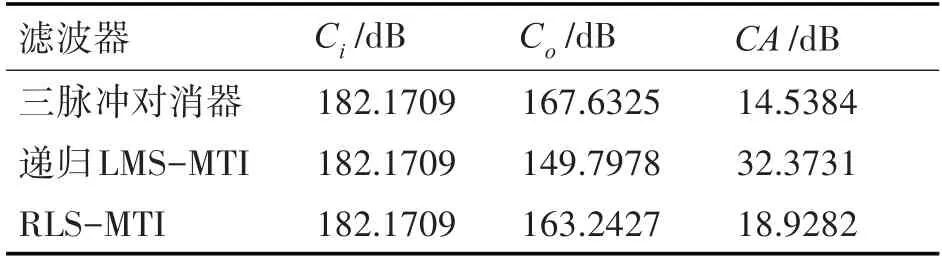
表5 實測數(shù)據(jù)AMTI濾波性能
同時,由仿真結果與實測結果可得,雜波抑制能力強與慢速目標的發(fā)現(xiàn)能力是成反比的,目前解決這一矛盾的方法是偏置相位中心(DPCA)和順軌干涉(ATI)等方法[8],在后續(xù)的研究中將對該類MTI方式展開進一步的研究。
5 結語
本文通過AR線性預測模型與最小功率準則相結合,推導得到了LMS-MTI 和RLS-MTI 兩種自適應雜波抑制方法的遞歸實現(xiàn)公式。對仿真數(shù)據(jù)和實測數(shù)據(jù)的研究結果表明,AMTI 能夠更好地抑制海雜波,并且在5 級海況以下,由于海雜波的均勻程度較高,LMS-MTI 可以取得比RLS-MTI 更好的雜波抑制效果。在未來的工作中,仍需對高海況、非均勻條件下的海雜波進行分析,并觀察兩種自適應MTI濾波器在非平穩(wěn)背景下的工作性能。此外,還將開展海雜波背景下基于DPCA和ATI的慢動目標檢測方法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19