雙饋異步風電機組機側轉速控制器的設計與仿真研究
2023-10-07 09:14:02盧成志張銀龍
太陽能 2023年9期
關鍵詞:風速
張 駿,馬 東,盧成志,張銀龍
(華電電力科學研究院有限公司,杭州 310030)
0 引言
為落實中國節能減排目標,近年來中國風電機組裝機容量快速增長,在總裝機量中占比不斷提升。根據中國電力企業聯合會發布的2023年1—2月電力工業運行簡況,截至2023年2月,中國風電機組裝機容量為3.7億kW,占總裝機量的14.20%[1-2]。目前大規模并網運行的風電機組可分為兩類:永磁直驅風電機組(PMSG)和雙饋異步風電機組(DFIG)。DFIG由于其發電機(繞線式)和變流器造價低廉,在額定功率為2 MW及以下的風電機組類型中廣泛使用。
DFIG在不同風速段的控制目標也略有不同。在切入風速附近(對于1.5 MW風電機組,風速一般為3.0~4.5 m/s)DFIG控制方式為恒轉速控制(轉速為1000 r/min),此時DFIG保持最低并網轉速(控制I段);當風速(一般為4.5~9.0 m/s)略高于切入風速且略低于額定風速時,DFIG控制方式為恒定風能利用系數Cp控制,此時風輪轉速隨著風速的變化,而變化保持其最大風能利用系數Cp,max值不變(轉速范圍為1000~1800 r/min),從而使風輪捕獲的能量最大(控制II段);當風速在額定風速附近時(一般為9~11 m/s),此時DFIG保持額定轉速(1800 r/min)運行(控制III段);當風速高于額定風速(11 m/s)時,此時DFIG為依然保持額定轉速(1800 r/min)恒功率運行(控制IV段)。
由于風資源較好的地區風能開發已趨于飽和,同時隨著平價與競價上網時代的到來,提升風電機組在低風速下的發電效率具有重要意義[3]。DFIG在控制II段(低風速段)通過調節發電機轉矩使風輪按照最佳葉尖速比運行,跟蹤最佳風能利用系數,提升風能利用率[4-5]。由于在電氣結構上,DFIG的定子繞組直接與電網相連,機側(即轉子側)通過變流器與電網相連,可通過調節轉子側變流器輸出的頻率和電流幅值控制DFIG轉速[6]。所以,目前大多數主機廠家在控制II段主要采用查表法,主控系統將不同轉速對應的轉矩下放至變流器,由變流器調節轉子側電流大小,以實現對DFIG的轉速控制。所以網側變流器作為DFIG轉速控制的核心部件,其控制方法和控制參數的選擇極其關鍵。
本文在建立DFIG數學模型的基礎上,采用傳統PI矢量控制技術實現DFIG轉速控制,并利用典型Ⅰ型系統參數設計方法優化控制器參數,同時結合Simulink仿真軟件對該方法設計得到的參數進行仿真驗證。
1 DFIG數學建模
由于雙饋發電機具有非線性、強耦合的特性,所以為實現DFIG轉速控制,必須構建DFIG動態數學模型。DFIG的轉子側電氣原理如圖1所示。圖中:ur、ir為轉子側電壓、電流,us、is分別為定子側電壓、電流,Q1~Q3、Q1′~Q3′均為絕緣柵雙極型晶體管,C1為電容。
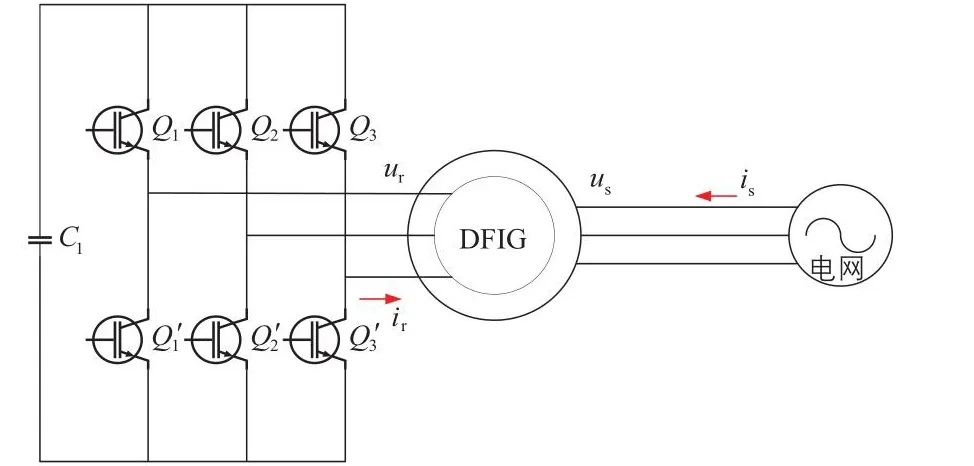
圖1 DFIG轉子側電氣原理圖Fig.1 Electrical schematic diagram of rotor side of DFIG
由于傳統的PI控制方式一般只能無靜差跟蹤階躍信號,所以需將機側三相靜止坐標系下的方程轉換為兩相同步旋轉坐標方程,DFIG定子側數學模型為[5,7]:
式中:usd、isd和usq、isq分別為定子d軸和q軸的電壓、電流分量;Rs為定子各相繞組電阻;ψsd、ψsq分別為定子磁鏈d軸、q軸分量;ωs為同步轉速的電角速度。
定子磁鏈d軸、q軸分量的計算式為:
式中:Lm為勵磁電感;Ls為定子漏感和勵磁電感之和;ird、irq分別為轉子d軸和q軸的電流分量。
DFIG轉子側數學模型為:
式中:urd、urq分別為轉子d軸和q軸的電壓分量;Rr為轉子各相繞組電阻;ωm為轉子的電角速度;ψrd、ψrq分別為轉子磁鏈d軸、q軸分量。
轉子磁鏈d軸、q軸分量的計算式為:
式中:Lr為轉子漏感和勵磁電感之和。
電磁轉矩Te及運動方程為:
式中:TL為拖動轉矩;J為轉動慣量;np為磁極對數;Ωr為轉子機械角速度。
目前DFIG轉速控制方式一般采用基于定子磁鏈定向的矢量控制技術,將同步旋轉坐標系的d軸定位于定子磁鏈空間矢量ψs,ψs與d軸重合,因此在q軸上的分量為0,表達式為:
由于目前兆瓦級風電機組定子側電阻較小,可忽略不計,取值為零,則其定子側電壓方程可簡化為:
式中:Vs為usq的幅值。
轉子在d軸、q軸上的電壓方程為:
其中:
電磁轉矩方程:
定子側有功、無功時的功率Ps、Qs的表達式為方程分別為:
式中:im為定子側電流幅值。
2 控制器參數優化設計
由式(17)~(19)可得出,在定子磁鏈定向的同步旋轉坐標系下電磁轉矩大小僅取決于轉子側q軸的電流分量,定子側無功功率取決于轉子側d軸的電流分量。因此,本文通過調節轉子電壓的方式來控制轉子側電流,從而調節發電機轉速和定子側無功功率。
從式(14)、式(15)可以發現:控制項urd、urq和被控項ird、irq分別存在耦合項(下文公式中的*代表其控制的參考量),為消除耦合項的影響,采用PI前饋解耦控制,其控制方程為[8]:
式中:kp為比例參數;ki為積分參數;s為拉普拉斯算子。
將式(19)、式(20)帶入式(14)、式(15),且在穩態的情況下ψs的導數為零,可得:
從式(22)、式(23)可以看出:通過引入電流反饋和耦合項的前饋控制,可實現對轉子側電流的無靜差控制。
在變流器控制中引入延遲環節T=0.5Ts(其中,Ts為正弦脈寬調制(SPWM)開關時間),則轉子側電流內環(d、q軸一致)的控制框圖如圖2所示。圖中:τi為PI控制器參數,id為d軸或r軸轉子側電流。
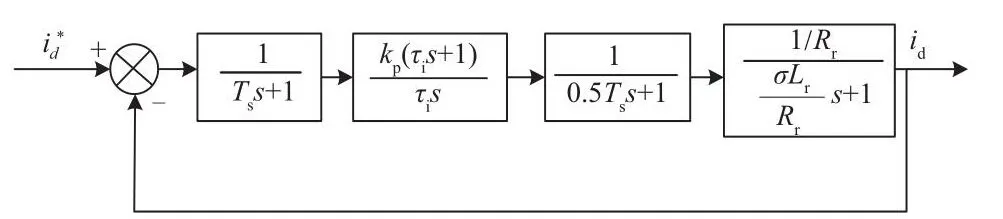
圖2 轉子側電流內環的控制框圖Fig.2 Loop control block diagram of rotor side current inner
將其中電流采樣環節和延遲環節合并,并忽略電流閉環函數(S)的高次項后對控制框圖簡化如圖3所示。
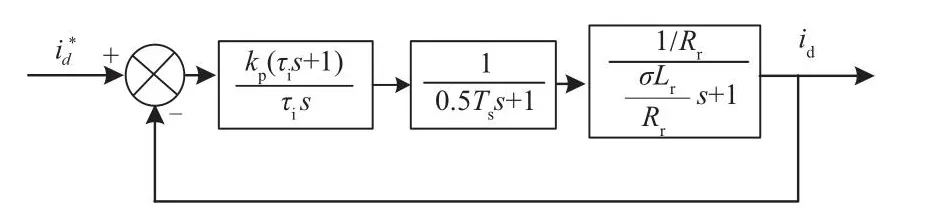
圖3 轉子側電流內環的簡化控制框圖Fig.3 Simplified control block diagram of rotor side current inner loop
其開環傳遞函數為:
一般電流控制環要求快速的跟隨性,因此可以按照典型I型系統設計,令則系統的開環傳遞函數可進一步簡化為:
按照“二階最佳系統”進行參數整定,令阻尼系數ξ=0.707、時間常數KT=0.5[7],可得到:
由于目前變流器開關頻率fsw足夠高,SPWM開關時間將很小,所以電流內環閉環函數可簡化為一個小慣性環節,其具有較快的動態響應特性。電流內環閉環函數Gci(S)可表示為:
3 仿真驗證過程及結論
目前大多數變速恒頻風電機組在恒風能利用系數運行過程中采用查表法,主控系統根據風電機組的轉速將參考轉矩Tref、參考無功功率Qref發送至變流器,由變流器通過調節機側電壓和頻率來控制風電機組轉速實現恒風能利用系數運行。
本文主要針對這種控制模式,利用Simulink仿真軟件對當前常見的1.5 MW DFIG參數對變流器電流內環控制進行仿真驗證。DFIG的轉子側完整控制框圖如圖4所示,圖中:θm為電網的電角速,θs為發電側的電角速。1.5 MW的DFIG基本參數如表1所示。主控系統采用查表法,其轉速和轉矩的對應關系如表2所示。
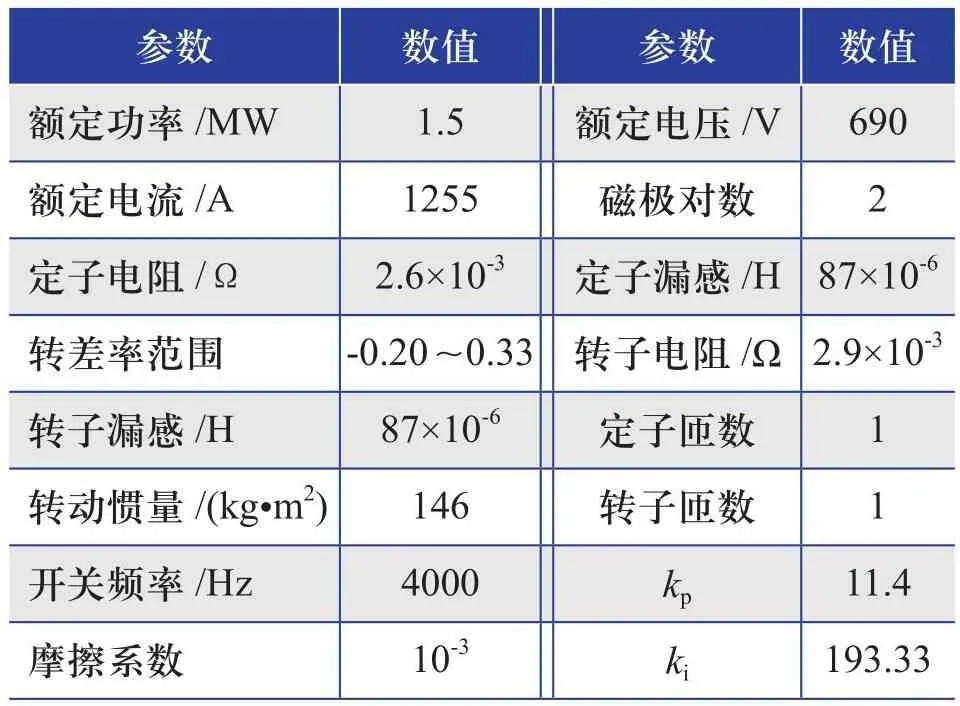
表1 1.5 MW DFIG基本參數Table 1 Basic parameters of 1.5 MW DFIG
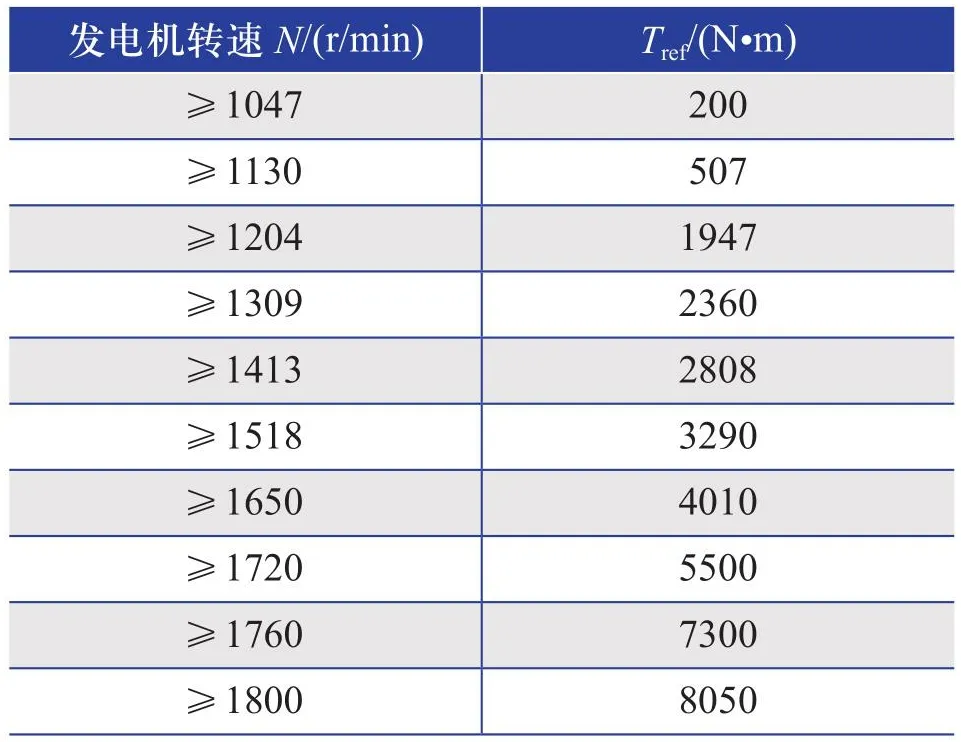
表2 1.5 MW DFIG采用查表法時的參數Table 2 Parameters of 1.5 MW DFIG using lookup table method
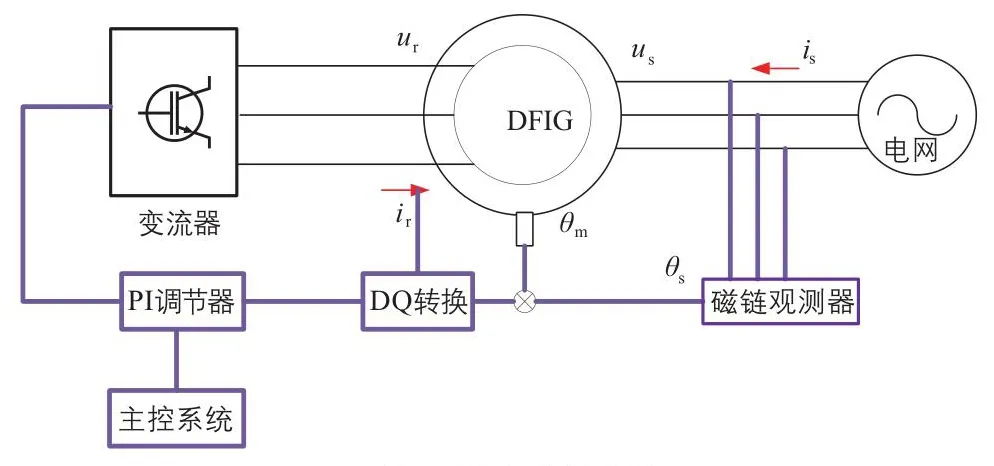
圖4 轉子側完整控制框圖Fig.4 Control block diagram of rotor side
圖5是DFIG轉速仿真圖,從圖5可以看出:DFIG從轉速0 r/min到并網轉速1000 r/min約為0.5 s。為模擬DFIG在大風環境中風速突變的情況,人為設置在6 s時DFIG輸入轉矩由0.3Te突變至0.5Te,經過5 s后,DFIG轉速穩定在1650 r/min,DFIG轉矩仿真圖如圖6所示,圖中:Twin為DFIG風輪輸入轉矩。
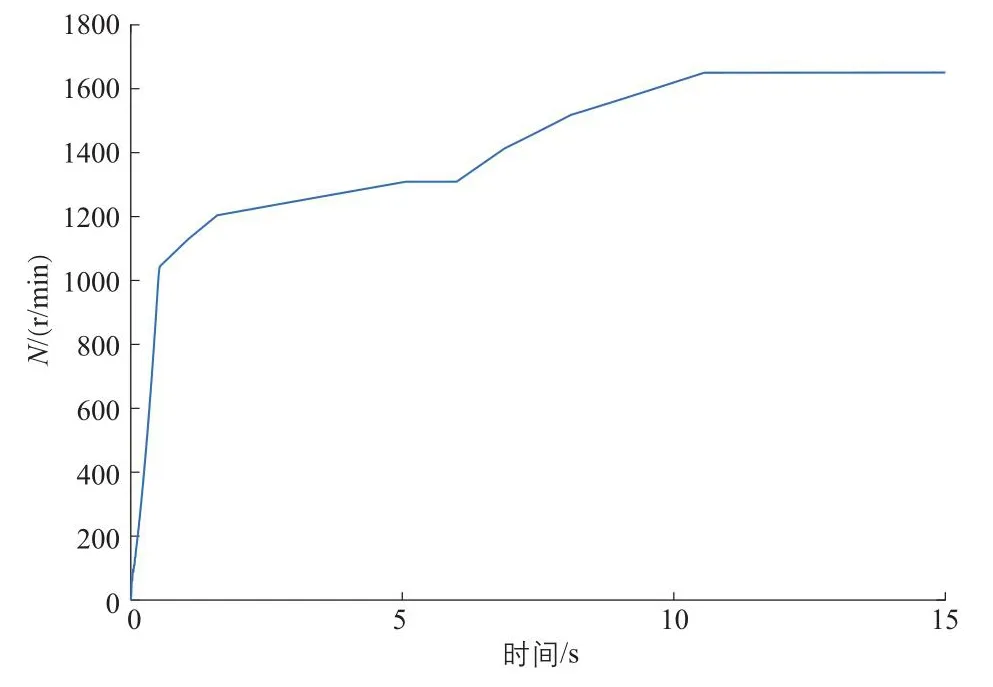
圖5 DFIG的轉速仿真圖Fig.5 Simulation diagram of speed of DFIG
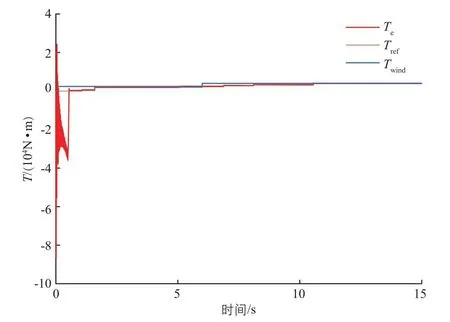
圖6 DFIG的轉矩仿真圖Fig.6 Simulation diagram of torque DFIG
從圖5、圖6可以看出:電磁轉矩數值跟隨主控系統下發給變流器的目標轉矩數值實時變化;隨著轉速的上升,電磁轉矩和主控系統下發給變流器的目標轉矩都呈階梯式變化,最后逐漸趨于穩定,穩定在風輪輸入轉矩的數值,從而轉速達到穩定。
圖7是DFIG轉子側電流(d、q軸)仿真圖,由于人為設置定子側無功功率為零,所以轉子側電流d軸分量的計算值為零,轉子側電流q軸分量由主控系統下放的轉矩通過式(17)計算得出。

圖7 DFIG轉子側電流仿真圖Fig.7 Simulation diagram of current of otor DFIG
從圖7可以看出:無論是轉子側電流d軸或q軸電流,都可以快速跟蹤主控系統給定值,即使由于輸入轉矩突變,控制器也能使系統重新達到平衡。
4 結論
本文研究了DFIG變流器機側控制器設計方法及參數整定計算方法,通過坐標變換將轉子側電流從三相靜止坐標系數學模型轉換成d、q軸同步旋轉坐標系數學模型,利用PI控制器實現風電機組的轉矩控制,并利用Simulink仿真軟件查表法進行仿真驗證,得出以下結論:
1) 利用PI控制器可實現風電機組轉速-轉矩控制,該控制器具快速性和抗擾動性。其發電機轉子側電流理論上可實現無靜差跟蹤。
2) 控制器設計過程中需要將轉子側三相靜止坐標系下的電流值轉換為兩相同步旋轉坐標系下的電流值,在實際應用中對變流器數字處理芯片的性能要求較高。
3) 在定子磁鏈定向的矢量控制方法中,其磁鏈定向的準確性會直接影響控制器性能,本文仿真采用的是電網電壓定向的磁鏈觀測器,在理想電網的情況下該方法能準確反映磁鏈空間矢量情況,但在電網故障的情況下定子會感應出磁鏈的自由分量,從而影響磁鏈觀測器的結果。
4) 由于采用查表法的控制方式,一方面,DFIG轉矩成階梯狀上升,導致DFIG轉速無法實時跟蹤風速的變化,從而影響DFIG能效;另一方面,在轉矩變化的附近,由于風速小幅度變化,可能導致轉速出現震蕩情況。
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
