室外環境中的關聯成像研究進展*
2023-10-06 07:03:34常宸孫帥杜隆坤聶鎮武何林貴張翼陳鵬鮑可劉偉濤
物理學報 2023年18期
關鍵詞:關聯
常宸 孫帥 杜隆坤 聶鎮武 何林貴 張翼 陳鵬 鮑可 劉偉濤?
1) (國防科技大學理學院,量子信息研究所,長沙 410073)
2) (國防科技大學,量子信息學科交叉中心,長沙 410073)
3) (國防科技大學,湖南省量子信息機理與技術重點實驗室,長沙 410073)
光學成像是人類不可或缺的信息獲取方式之一,其在預警偵察、精確制導、交通運輸和工業生產等軍用和民用領域發揮著不可替代的作用.在室外環境中,由于背景光、雜散光和大氣介質的影響,光學成像的分辨率、信噪比和作用距離等受到限制.近年來,在光學、物理、信息論及計算機等多學科的交叉融合發展的支撐下,新型光學成像技術不斷涌現,為發展遠距離、大視場、高信息通量的室外光學成像帶來新的契機.關聯成像作為新型主動成像技術之一,具有高靈敏、抗干擾、信息并行獲取等特點,能夠較好地應對室外光學成像中所面臨的如遠距離導致光功率急劇衰減、環境噪聲干擾引起的低信噪比等問題,并能在一定程度上減少散射、湍流等導致的圖像模糊等問題,是當前室外環境中光學成像的熱門研究領域之一.本文從光學成像原理出發,分析室外環境中光學成像分辨率、信噪比、空間帶寬積和成像距離的影響因素,重點介紹和梳理室外關聯成像在成像系統、信噪甄別技術和成像算法等方面的研究進展,并淺析光學成像向更遠距離、更廣視場拓展的過程中需要研究的基礎問題和待攻克的關鍵技術.
1 引言
成像是指將客觀景物轉變為圖像的過程,是人類認識、改造世界的過程中不可或缺的工具.從冷凍電鏡細分蛋白分子結構到韋伯望遠鏡巡查宇宙瑰麗場景,從飛秒脈沖測量超快過程到延遲攝影記錄白云蒼狗,再從激光雷達助力自動駕駛到超聲波圖像洞察體內組織,成像技術的進步在不斷拓展人類的認知邊界,服務人類的生產生活,并在醫學診斷、智能制造、資源普查、環境保護和國防安全等領域發揮著關鍵性的支撐作用.
在成像過程中,待成像物景反射、透射或輻射電磁波、聲波或物質波等信息載體,信息載體在介質中傳播后被探測并解譯,進而在物景以外的時空點記錄、恢復或再現物景圖像.根據信息載體的時空二元性,成像可以分為時間域成像和空間域成像.在空間域成像中,根據信息載體所編碼自由度的不同,成像可以分為相位成像、強度成像、復振幅成像和偏振成像等.根據信息載體的不同,成像又分為聲波成像、物質波成像(電子成像[1]、質子成像[2-4]等)、電磁波譜段成像(微波成像[5-7]、THz成像[8-10]、紅外成像[11]、可見光成像、紫外成像[12]等),以及近年來出現的光聲成像[13,14]、微波光子成像[15,16]等.根據探測手段和圖像信息域的不同,成像還可以分為空間域成像、傅里葉域成像等.其中光學成像是指以光波為載體,利用成像系統和光電探測再現、恢復或重構物景圖像.由于圖像提供的信息豐富且直觀,光學成像在天基遙感、地球測繪、預警偵察、自動駕駛等關系國計民生的重要領域中發揮著不可替代的作用.
在室外環境中,弱回波、強噪聲,大氣擾動等不利因素是各類光學成像手段所面臨的共同挑戰.待成像場景通常較為復雜,場景中物體以反射式物體為主,其材料、結構、形狀多變,反射回波往往較弱.此外,由于成像距離較遠,大氣介質對光的吸收與擴散進一步擴大了弱回波的難題.較弱的回波通常攜載了豐富物景的信息,這好比“小馬(弱回波)拉大車(大信息量)”,圖像恢復難度較大,并且這個問題將隨著成像距離的提升變得愈發困難.同時,在室外環境中,來自其他目標或輻射體的雜散光不可避免,常常降低目標回波信噪比.此外,光在大氣介質中傳播時的波前畸變也會導致目標空間信息混疊,圖像對比度和分辨率的退化嚴重.總而言之,要在遠距離、廣視域、強干擾、低信噪比和復雜場景條件下實時地獲取大視場、高分辨、細節豐富的場景圖像,這對成像系統的靈敏度、抗噪性能、空間帶寬積、魯棒性都有極高的要求.
關聯成像,是一種起源于量子糾纏的主動成像技術,利用光場二階相干性對物體的圖像進行重構.和傳統的光學成像不同,關聯成像技術具有高靈敏、抗干擾、無透鏡成像、多維信息并行獲取等潛在優勢,因此具備弱回波探測、低信噪比成像、突破分辨率極限等潛能,從而實現遠距離成像.本文以室外環境中的光學成像為引,從成像理論、光源、算法等角度對室外關聯成像的研究進展介紹,并對這一成像技術進行進一步的探討與展望.
2 室外環境中的光學成像
2.1 光學成像的物理基礎
光學成像的過程可以簡化為: 基于包括光源、光學系統與探測裝置等的成像系統,對目標輻射或反(透)射光子進行探測與記錄,建立物像之間的“點對點”映射,以此重現或恢復目標信息.以高斯成像系統為例,目標各點自發輻射或反(透)射的光子經由透鏡后被光電探測器記錄.在這一過程中,根據單光子干涉的理論,任意光子僅與自己發生干涉.物體各點處光子在達到像面后,經過相同的光程而在像點處發生相長干涉,在其他點發生相消干涉.大量光子在干涉面積內非相干疊加,經系綜平均形成規則艾里斑.物體上光強越強的點,單位時間內反(透)的光子數越多,形成的艾里斑也越亮,由此完成物面與像面點對點映射關系的建立.此外,這一映射關系也可通過算法恢復重構.例如,在共聚焦成像中,點對點(斑)映射直接通過光場通過光學系統后的一階干涉實現.再如,散射成像中,點擴展函數是隨機散斑,點對點映射可以通過算法恢復.
光學成像的構型如圖1 所示.目標物體反射(自身輻射的光場)通過光學系統到達探測器,光場信息經過光電轉換最終由計算機記錄或恢復圖像信息.同時,計算機控制光學系統和探測模塊參數,使獲得的圖像質量更優.在主動光學成像中,光場調控和光子態的制備通常也需要計算機的控制和優化.因此,成像實驗所需的技術包括光源模塊技術,光路設計和搭建,光場信號探測以及圖像信息解譯等.
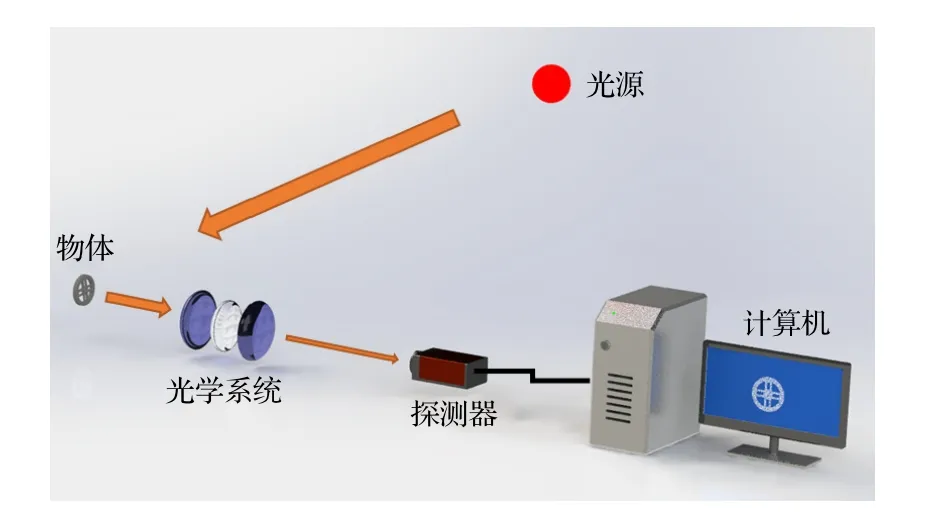
圖1 光學成像構型示意圖Fig.1.Schematic of optical imaging configuration.
在光學系統中,光源的強度、波長、類型等決定了成像過程中能夠用于傳遞物體信息的光子數及其所傳遞信息的類型,間接影響著光學系統、探測器以及成像算法的選取與應用.光學系統在光傳播過程中往往起著調整、約束光子的作用,使物像間滿足成像關系的同時能有效提高光子的利用效率,進而提高信號的信噪比.此外,光學系統與工作波長共同決定了成像結果的光學分辨率.探測器負責記錄光子的分布,其靈敏度、探測效率、探測噪聲等影響著成像信噪比、成像視場與圖像分辨率,在需進行多次測量的成像過程中,探測器的響應速率也決定了成像速率.對于部分光學成像過程,算法主要起到圖像優化的作用,通過對成像環境、重構圖像等的分析選取合適的優化算法,能夠進一步提升成像質量.而對于散射成像或關聯成像等,利用算法進行圖像重構則是從探測器返回數據中反解物體信息必不可少的步驟,算法的性能直接決定著圖像重構的速率、重構圖像的質量.
2.2 光學成像的像質要素
在對成像系統的性能進行定量評價時,可靠的像質評價指標不可或缺.在此我們對成像相關研究中所常見的像質評價指標,包括分辨率、信噪比、對比度等進行簡單的介紹.
成像分辨率成像分辨率是對圖像細節分辨能力的衡量.成像系統的分辨率主要包括光學分辨率(衍射極限)與圖像分辨率(像素尺寸).二者共同成為光學成像系統空間分辨率的制約因素.
光學分辨率是指通常指在衍射的影響下,物體上兩點間能被區分開的最小距離.限制成像過程中光學分辨率的因素主要包括兩個方面,其一為光學系統的孔徑尺寸;其二為觀察樣本所用光源的波長.在表征光學分辨率時,通常需要考慮3 個物理概念: “艾里斑”、“瑞利判據”、“阿貝衍射極限”.“艾里斑”是指通過一定尺寸的光學系統時,由于衍射現象導致的多個亮暗相間的同心環,其中心為點狀光斑.“艾里斑”之間能否互相區分,決定著圖像中物體各點能否互相區分,即Rayleigh[17]于1896 年提出的“瑞利判據”理論:
其中,DAiry為艾里斑的直徑,λ為光的波長,f為焦距,D為通光孔徑,NA=D/(2f),即為數值孔徑,數值孔徑NA為量綱為一的量,通常用于表示鏡頭收光能力的強弱,進而決定了系統的光學分辨率.值得說明的是,瑞利判據嚴格意義上并不是一個基本的物理定律,而是一個有些主觀定義的值.
1873 年,Abbe[18]提出了著名的阿貝成像原理,其顯式地將成像過程分為兩步,即分頻與合成.成像系統對分辨率的限制作用就體現在頻譜面的低通濾波效應,其所對應的最小可分辨間距為
這就是頻域角度出發,得到的“阿貝衍射極限”.
如圖2 所示,“艾里斑、瑞利判據”與“阿貝衍射極限”分別從不同的角度衡量了成像系統的分辨能力.
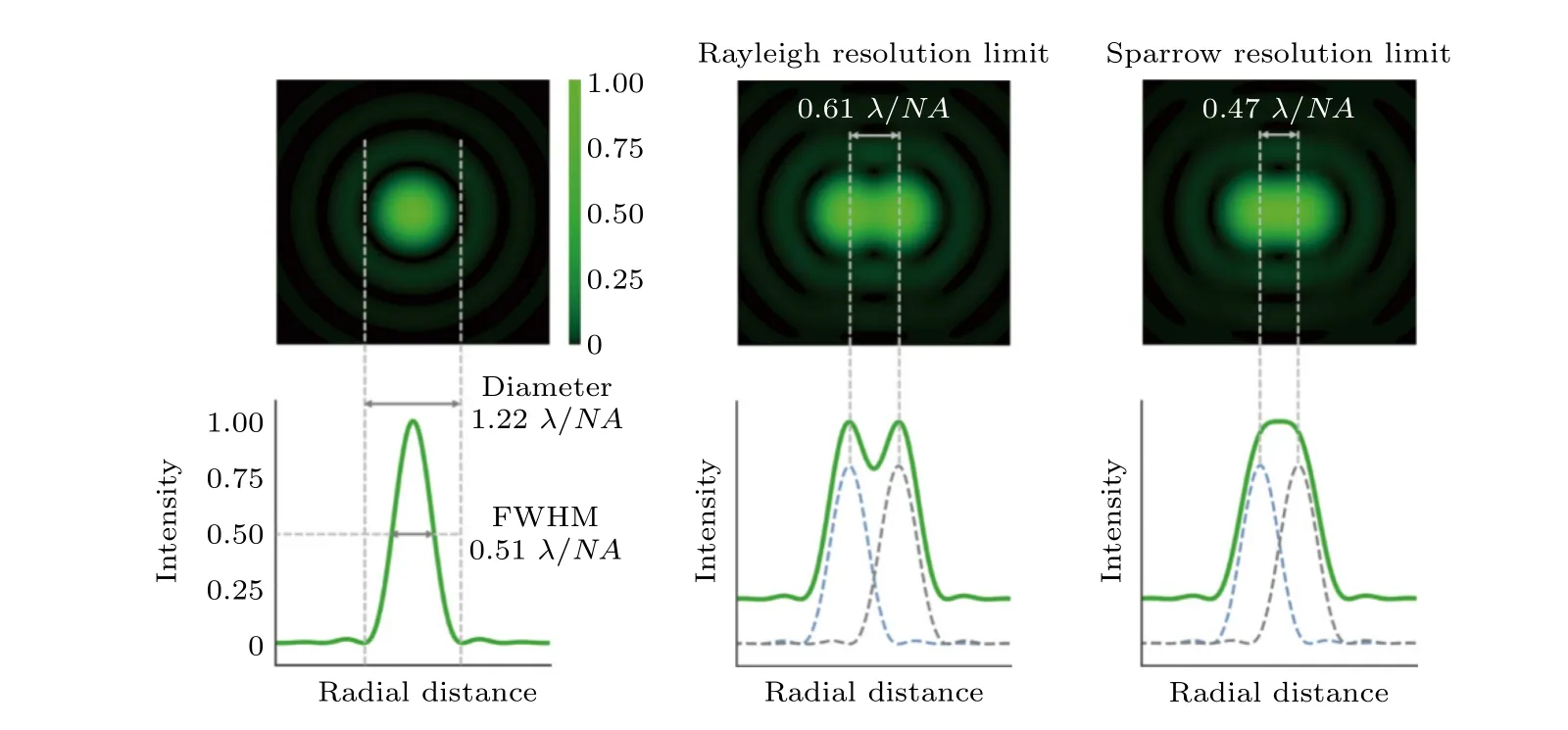
圖2 艾里斑、瑞利衍射以及阿貝衍射極限[19]Fig.2.Limit of Airy disk,Rayleigh diffraction and Abbe diffraction[19].
在關聯成像中,成像分辨率還可對應于光場自相關所得單峰函數的半高全寬.與傳統成像所不同,關聯成像是基于光場間的高階關聯獲取重構圖像,其重構圖像中物體上兩點能否分辨不再僅取決于光學系統,更多地是由照明光場其自身的性質所決定.照明光場中,相鄰像素間的相關性決定了區分重構圖像中相鄰各點間的難以程度.顯然,當光場中相鄰像素間的相關性越高,重構圖像中相鄰點也越難以區分,此時光場自相關函數的半高全寬越寬.
圖像分辨率,又稱像素分辨率,表述了圖像中對于物體細節的呈現能力,由單位圖像(或探測器陣列)內像素點數決定.隨著光電數字化的發展,圖像需要通過圖像傳感器件進行數字化離散采樣和記錄.因此,光電探測器件的圖像分辨率成為了光學分辨率外制約系統空間分辨率的另一大因素.在對光學圖像進行離散化采樣的過程中,在每個采樣點上,局部區域內的輻照度被積分并被圖像傳感器所記錄.由香農-奈奎斯特采樣定理可得,采樣間距必須大于信號中最高頻率分量的兩倍.對于光學圖像來說,當探測器像素尺寸間距過大,或采樣過于稀疏時,像素中的信息發生混疊,造成圖像分辨率的下降.
信噪比(signal-to-noise ratio,SNR)在光學成像中,由于成像過程可分為數據采集與圖像重構,相應地將信噪比分為信號的信噪比與圖像的信噪比.前者是指所采集數據中信號光與噪聲光的能量或功率之比,可用于定性評估系統的成像能力,后者是指系統所得重構圖像中目標與背景噪聲能量/功率之比,可用于定量評價系統的成像質量.光子是光學成像系統中的信息載體.被探測的信號光子數越少,光學系統可解耦的信息量越少.在光子通量有限的情況下,噪聲會嚴重影響信息的解耦,具體表現為圖像的信噪比極低、信息缺失、甚至無法成像.
在信號信噪比中,噪聲光包括環境中非目標反(透)射的雜散光、探測器測量及信號傳輸過程中產生的散粒噪聲與測量噪聲等.由此可得信號的信噪比為
其中Np為光子數; QE 為探測器的量子效率;Ns,Ne和Nd分別為散粒噪聲、環境噪聲和探測器噪聲.所以如何提高探測器的靈敏度,降低探測器的測量噪聲成為了光學成像中的一個重要課題.
對于圖像信噪比,我們將其中感興趣區域(region of interest,ROI)像素的理想值視為圖像中的信號真值,其與實際重構圖像的差異視為噪聲,此時可以定義圖像信噪比為
其中〈S〉為信號均值,〈N〉為噪聲均值,SDimg為圖像的標準差.一般來說,信號的信噪比越高,得到的圖像信噪比就越高.如何準確甄別信號與噪聲、最大程度上抑制噪聲也是一項極具挑戰性的研究工作.相對其他像質評價指標,信噪比是相關研究中最為常用的評價指標.
圖像對比度(contrast)對比度指的是一幅圖像中明暗區域最亮的白和最暗的黑之間不同亮度層級的差異.差異范圍越大代表對比越強烈,差異范圍越小代表對比越小.常用的韋伯對比度表達式為
其中,S1為物體的亮度,S2為背景的整體亮度.韋伯對比度表示在同種刺激下,人感受到的刺激的動態范圍正比于標準刺激的強度.另有Michelson 對比度:
其和韋伯對比度有異曲同工之處.
對比度也是圖像質量的一種衡量方式.即使具有相同的信噪比,但依然可能具有不同的對比度,并呈現出較大的視覺差異.
圖像襯噪比(contrast-to-noise ratio,CNR)與圖像信噪比相似,CNR 是一類用于評價圖像中信號與背景噪聲差異的評價指標.關聯成像特別是贗熱光關聯成像中,由于其原理決定即使無噪聲情況下圖像中非信號區域也會得到非零取值,因此通常將相應的背景項扣除后再對信號與噪聲進行比較.即定義圖像襯噪比CNR 為
其中To指重構圖像中的目標區域,Tb指重構圖像中的背景區域.
結構相似性(structural similarity index measure,SSIM)從圖像的亮度、對比度及結構等角度評估了重構圖像與實際物體間的相似性.其公式較為復雜,在此不再列出.由于SSIM 計算結果取值范圍固定為0–1 (分別代表兩張圖像完全不同與完全相同),因此該指標能夠直觀地表現重構圖像質量.但在SSIM 中,并未區分重構圖像中的“信號”與“背景”,故而在成像目標占視場尺寸較小時,其評價結果更多地集中于對“背景區域”的評價,無法很好地反映圖像中目標物體的重構情況.
圖3 中以一張關聯成像實驗中所得的重構圖像為基礎,計算了其圖像信噪比、對比度、襯噪比與結構相似性.圖3(a)為參考圖像,圖3(b)和圖3(c)分別為以漲落關聯、差分關聯算法所得的重構圖像.所得的評價結果為: 對于圖3(b),SNR 為4.02,CNR 為2.79,對比度為0.15,SSIM 為0.09;對于圖3(c),SNR 為2.39,CNR 為1.51,對比度為0.11,SSIM 為0.05;
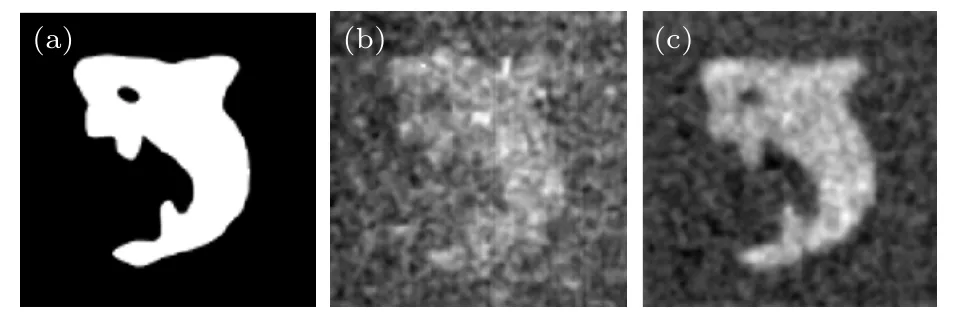
圖3 (a)理想圖像;(b)漲落關聯重構圖像;(c)差分關聯重構圖像Fig.3.(a) Ideal image;(b) reconstructed image by fluctuation correlation;(c) reconstructed image by differential ghost imaging.
2.3 室外環境對光學成像的影響
與室內環境相比,室外環境對光學成像的影響主要體現在弱回波、強噪聲、環境影響等方面.
弱回波在傳輸過程中,受大氣中組分的影響,不同波段的光波均會產生一定程度的衰減.對于可見光波段,由氮分子與氧分子所引起的瑞利散射不容忽視,大氣中某些原子的共振吸收也將進一步導致可見光波段的衰減.對于紅外波段,分子的帶吸收是其衰減的重要原因.此外,由氣溶膠顆粒所導致的米氏散射也將導致光波能量的急劇衰減.同時,光波在傳輸過程中將不可避免地發生擴散.根據激光雷達公式可知,探測器所接收光的功率與距離四次方成反比.
此外,在室外環境中成像目標多為反射式目標.與反射式目標相比,透射式目標的回波信號并未經過吸收或反射,其擴散角度與單位面積內光強可近似視為未受物體影響.而當目標為反射式目標時,回波信號是由目標表面對光波的反射形成,這一過程中物體表面將會發生對光波的吸收與反射,能量損失無可避免.與此同時,目標的粗糙表面或反射角度將會加劇光波的擴散現象,進一步加劇回波能量的衰減.綜合而言,對于反射式目標,其材料性質、反射類型、反射角度等因素決定了可收集的回波遠遠小于照射信號,進一步惡化了室外環境中光學成像所面臨的弱回波問題.
強噪聲在光學成像中,背景光、散射光等會帶來很強的噪聲.面對噪聲的干擾,常見的濾波降噪手段包括頻率濾波、時域濾波或空間濾波等.在室外環境中,日光覆蓋了絕大多數光學成像所用的波段,目標周邊環境的反射光與目標回波具有相似的特征.而在主動成像體系中,散射介質引起的后向散射噪聲與目標回波僅在時域上有著一定的區分.對于此類環境光噪聲,難以借助單一的濾波手段進行有效地降噪,同時也會進一步降低回波信號能量.
此外,探測器自身在完成光電轉換、信號傳輸的過程中會產生一定的量化誤差與探測噪聲.當回波能量較高時此類噪聲的影響往往可忽略不計,但在室外環境下,目標回波通常較弱,此時此類噪聲的影響將不容忽視.
大氣環境影響大氣環境對成像的影響不僅體現在吸收與散射引起的光能量衰減,還包括散射、氣流或者湍流引起的像與物之間點對點關系的扭曲.大氣湍流是大氣中一種典型的不規則的隨機過程,在遠距離傳播過程中,其引起的折射率隨機起伏對成像的影響不容忽視.一種用于描述大氣湍流的參數是大氣結構常數,該參數表示大氣折射率的起伏大小,在環境溫度、風速等影響下將會產生上下波動.基于該參數,研究人員提出了多種模型,如SLC-Day 模型[20],H-V 模型(Hufnagel-Valley model)[21]、Greenwood 模型等[22].雨霧等不良天氣條件下,大氣散射顯著增強,光的直線傳播被破壞,從而物像之間的點對點對應快速退化,同樣導致成像質量下降.針對散射或湍流的影響,研究人員提出了如利用彈道光成像的光學相位共軛、反饋控制的波前整形、基于光學記憶效應的散射成像技術及深度學習等方法.然而由于其影響的隨機性和復雜性,散射及湍流影響仍是室外光學成像中亟待解決的難題.
3 室外環境中的關聯成像
3.1 關聯成像原理
關聯成像,又稱鬼成像,是一種基于光場高階關聯的主動成像技術.該技術通過對光源進行調制,并基于所采集數據進行重構運算得到目標圖像.其起源可追溯至Hanbury-Brwon 和Twiss (HBT)實驗[23],該實驗原理如圖4 所示.通過計算探測器C1和 C2所接受的星光的干涉條紋,計算其周期即可得到星體角.
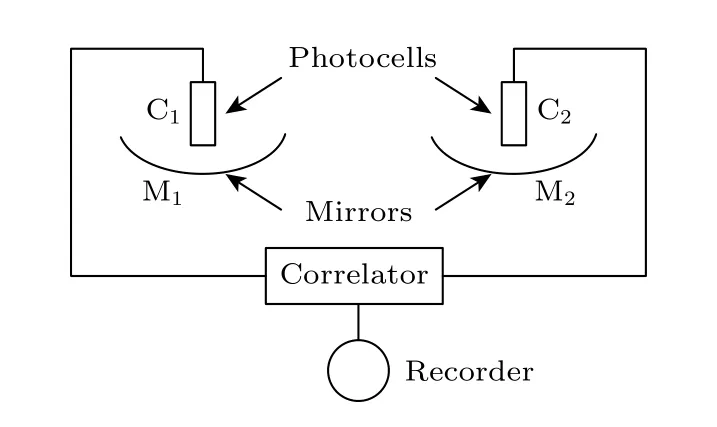
圖4 HBT 實驗基礎原理圖[23]Fig.4.Schematic diagram of HBT[23].
在HBT 實驗中,以I1與I2分別表示 C1和C2的探測結果,計算其內積可得
由于在關聯成像中,光場各空間位置處強度相互獨立且隨機,因此光場的二階相關度可寫作:
其中g為由光場自身所決定的常數,δ(x,y) 為沖激響應,x和y分別代表空間坐標.此時相干長度與圖像像素尺寸相匹配,若成像系統無需考慮散射等傳播影響,物像間形成嚴格的“點對點”一一對應.
以Ir(x,y) 表示某一時刻參考臂照明光場,IB(x,y) 表示同一時刻探測臂照明光場,O(x,y) 表示目標物體的透過函數,則桶探測器所采數據可表示為
此時雙臂數據的歸一化二階關聯結果可寫作:
第1 個具體的關聯成像理論方案由Klyshko[24]于1988 提出,并由Shih[25]于1995 年以參量下轉換糾纏光實現首例關聯成像原理驗證實驗.隨后經過近30 年的發展,在光源類型上逐漸出現了熱光、贗熱光甚至微波[26]、物質波[27]等關聯成像實驗;在成像架構上則在雙臂關聯成像之外衍生出了單臂(計算)關聯成像[28];在重構算法上,在傳統的強度/漲落關聯算法外誕生了差分關聯成像算法[29]、歸一化關聯成像算法[30],以及壓縮感知算法[31-33]與深度學習算法[34-36].在相關研究所應用的各類光源中,自發參量下轉換所得的糾纏光子數目過少,自然存在的熱光光強的相干時間或漲落時間太短,相較之下,以其他光源模擬熱光所得的贗熱光光源易于制備,便于探測,因此成為研究所用的主流光源之一.其中以激光經過旋轉毛玻璃所形成的贗熱光最為常見,其實驗架構如圖5 所示.
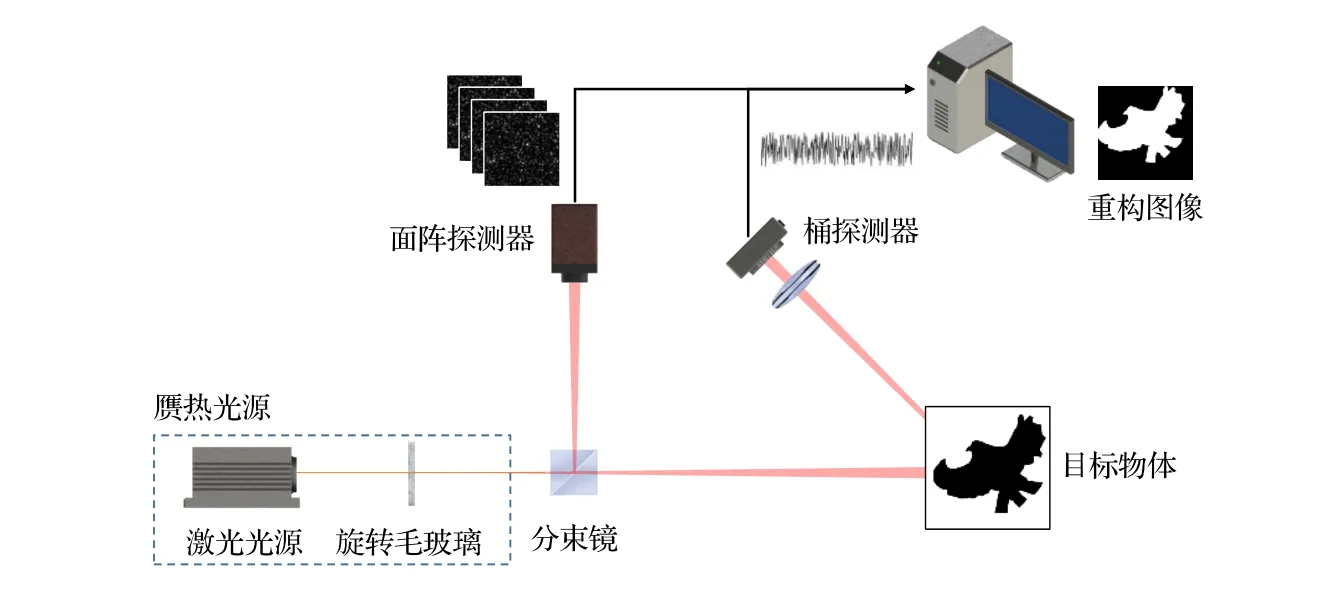
圖5 贗熱光關聯成像系統示意圖Fig.5.Schematic diagram of ghost imaging based on pseudo-thermal light.
如圖5 所示,激光經過毛玻璃后形成散斑場,隨后被分束鏡分為參考臂與探測臂兩束光路,在參考臂光路中,散斑場經由面陣探測器直接記錄其空間分布,在探測臂光路中,散斑場經由目標反射后由桶探測器記錄其光強.面陣探測器沒有對物體進行探測,探測臂上僅進行單像素的能量探測,不具有空間分辨能力,因此這兩個探測器單獨均不能對物體進行成像.但是借助光場的二階關聯特性,在完成多次采樣后借助重構算法,對雙臂所采集的數據進行關聯運算則可得到目標的重構圖像.在計算關聯成像中,則是通過計算機生成光場的調制圖樣,并借助數字微鏡(digital micromirror devices,DMD)或空間光調制器(spatial light modulator,SLM)等調制器件生成相應的照明散斑場,借此省略了對參考臂散斑場的記錄需求,從而取消了參考臂光路.
對于關聯成像而言,光場的二階相干度相當于系統的點擴散函數.成像結果中物體分布可以寫作物體反射率函數和光場的二階相干度的卷積,所用光場二階相干度的單峰特性保證了物和像的點對點的成像關系.因此光源產生光場的二階相干度分布是影響成像質量的重要因素.以贗熱光關聯成像為例,激光經旋轉毛玻璃后的光場打在物體上形成散斑場,散斑大小由激光照射在毛玻璃上的尺寸、激光波長和傳播距離共同決定,二階相干度函數的峰值寬度就對應于散斑大小且決定了成像的分辨率.根據關聯成像的卷積關系可知,成像的對比度由二階相干度的對比度決定,光場二階相干度峰值越接近2,圖像的對比度越高.當然,在任何成像系統中都不可避免受到外界噪聲干擾,關聯成像中探測器及信號傳輸將會產生探測噪聲、電噪聲及量化噪聲等,光的傳輸也會引入相位噪聲.對于成像系統中傳輸路徑上的噪聲研究,人們主要考慮大氣湍流和散射介質的影響.
3.2 室外關聯成像特點
與其他光學成像方式相比,關聯成像具有高靈敏探測、抗噪聲干擾及多維信息獲取等特點,能夠在一定程度上應對室外環境對成像的干擾,同時可實現成型應用場景的擴展.
高靈敏探測傳統成像中是以陣列探測器收集待探測物體的空間分布信息,回波光子被分散到多個像元中完成探測,存在光子數難以達到像元探測閾值的可能性,加之環境中其他噪聲和散射介質的存在,限制了成像靈敏度.而在關聯成像中對物體回波的探測則是以桶探測器為主.桶探測器雖不具備空間分辨能力,但將探測范圍內全部光子進行記錄,因而使得關聯成像系統具有更靈敏的探測能力,在相同光源功率的條件下具備更遠成像距離的潛力,從而更好地應對室外成像場景下弱回波問題.
抗噪聲干擾室外成像環境中,環境光噪聲、目標周邊的背景噪聲等是影響成像質量的典型因素.關聯成像基于光場的高階關聯獲取目標圖像,對照明光源的主動調控可視作是對物體進行編碼,對回波進行關聯運算則是解碼過程,因此能夠抑制與光源統計性質無關的光噪聲.利用關聯成像主動照明這一特點,結合時域、空域編碼等技術可一定程度上去除背景噪聲干擾,實現低信噪比條件下的成像.另外,在數據采集過程中還可以根據已有數據反解物體信息,并對后續照明光場的分布、類型等做出實時調整,進一步提升抗噪聲能力.面對室外環境中的散射、湍流等干擾,關聯成像可借助對成像架構、算法等的優化設計,或是與自適應光學相結合,提高對大氣干擾的抵抗能力.
多維信息獲取在實際應用中,信息需求往往不僅僅局限于圖像,目標的距離、三維結構、運動狀態也是重要信息.作為一種主動成像方式,關聯成像能夠對照明光場施以多維度并行編碼從而同時獲取多種信息.可基于時域關聯獲得飛行時間從而完成進行測距,或是仿照激光雷達/單光子成像的模式實現目標三維結構信息的獲取,空間時間綜合編碼還可以實現測速甚至同時完成對運動目標的追蹤與成像[37-41].
4 室外關聯成像研究進展
室外關聯成像系統依據其工作過程可分為光源調制、大氣傳輸、回波探測與圖像重構.為提高成像質量,擴展應用范圍,相應的研究也主要圍繞這四部分展開.
4.1 贗熱光源獲取
如前文所述,光源的強度、波長、類型決定了成像過程中能夠用于傳遞物體信息的光子數及其所傳遞信息的類型,間接影響著光學系統、探測器以至于成像算法的選取與應用.因此,研制高刷新、高能量的贗熱光源對室外關聯成像至關重要.關聯成像系統常用的光源包括以旋轉毛玻璃、空間光調制器或數字微鏡器件等作為光場調制器件的贗熱光源,以高速光開關為核心技術的發光二極管(light emitting diode,LED)陣列,以及近年來嶄露頭角的片上集成贗熱光源等.
基于激光穿過旋轉毛玻璃所得的贗熱光源,2016 年,中國科學院上海光學精密機械研究所Gong等[42]采用脈寬10 ns 的激光,實現了三維激光關聯成像雷達.在2016 和2017 年,Deng 等[43,44]將近紅外3D 成像雷達技術與關聯成像、壓縮感知理論相結合,實現了基于近紅外波段的3D 激光關聯成像雷達.
上述光源調制方式下的成像采用的是雙光路形式,參考臂接收端采用的是采樣效率較低的面陣探測器.采用其他光學調制裝置,如DMD 或SLM代替旋轉毛玻璃可以省略參考臂以減少采樣時間、提高成像效率,此即2008 年Shapiro[28]提出的計算關聯成像.在該類成像系統中,照明光場的散斑模式可預制后加載于DMD 或SLM 中,因此研究人員得以對散斑模式進行主動設計與實時優化.2016 年英國格拉斯哥大學以DMD 調制過的激光做了三維關聯成像實驗[45].后來Rai 等[46]提出了推掃式GISC LiDAR(light detection and ranging)系統,也是用DMD 對脈沖激光進行調制,發射經預置和校準好的矩形散斑圖案.
上述兩種主流的光源調制模式均是以激光結合調制器件形成照明光場.調制器件自身的刷新速率限制著光源的調制速率.因此,研究人員開始追求對光源直接進行調制,而非經過調制器件調制.2016 年,Shin 等[47]研制的高幀速率LED 陣列照明光源其刷新頻率可達500 kHz,能夠捕獲動態場景的圖像.2017 年中國科學院西安光學精密機械研究所研制了一種片上集成多倍速率的脈沖激光器[48],利用了片上集成激光模式選擇機制,使其脈沖源的重頻可達GHz 量級,也可用于室外遠距離關聯成像.2019 年,日本神戶大學在此基礎上提出了基于VCSEL 光源的快速計算關聯成像[49].同年,日本東京大學制備了硅基贗熱光源[50].此外,本課題組自主研制了一種新型贗熱光源,顯著提升了光場刷新率與能量利用率,成功將成像速率提高一個數量級,工作距離提升30%.
4.2 大氣影響下的關聯成像
在室外成像場景下,大氣傳輸過程中所無法規避的能量衰減與湍流、氣流等引起的折射率隨機波動困擾著絕大多數光學成像手段.為解決此類問題,在關聯成像的相關研究中出現了基于理論、硬件、架構、算法等多種方式方法,驗證并不斷提高著這一成像技術的抗干擾成像能力.
2009 年,Cheng[51]理論上推導了關聯成像在大氣湍流影響下的解析解,并指出光源尺寸越小、湍流強度越大、傳播距離越遠都會使得圖像質量的下降.隨后Li 等[52]推導了部分相干光源條件下通過大氣湍流的關聯成像公式,得出與Cheng[51]一致的結論并指出物體與桶探測之間的湍流不會影響成像質量.2010 年,Zhang 等[53]利用隨機相位屏模型通過數值仿真驗證了在湍流條件下關聯成像能夠獲得比直接成像更好的分辨率,其實驗結果如圖6 所示,并于2013 年在真實大氣環境下進行了關聯成像實驗[54],其實驗結果如圖7 所示,實驗上驗證了關聯成像相對直接成像具有更強的抵抗大氣擾動的能力.2011 年Meyers 等[55]提出了一種無湍流熱光關聯成像,并進行了理論論證以及實驗驗證.這一發現立即引發了廣泛的關注.2012 年Sun 等[30]指出Meyers 等[55]給出的無湍流關聯成像理論推導以及實驗驗證只有在光源尺寸小于源平面湍流相干尺寸時才成立.2011 年,Gong 和Han[56]研究了散射介質在物臂不同位置對二階關聯成像的影響.當散射介質處于光源與物體之間時,直接成像可以免受散射介質的干擾.當散射介質處于物體與探測器之間時(此時為桶探測器),關聯成像可以免受散射介質的干擾.同年Hardy 和Shapiro[57]提出了更具有實用價值的反射式關聯成像,并研究了其在湍流條件下的分辨率、對比度、信噪比,給出了和透射式關聯成像一致的結論.
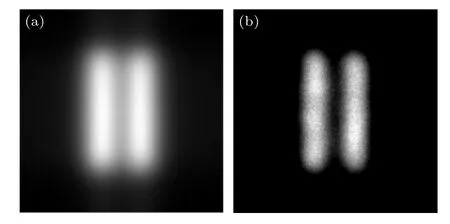
圖6 湍流干擾條件下直接成像與關聯成像圖像質量對比[53] (a)直接成像圖像;(b)關聯成像圖像Fig.6.Comparison of image quality between two imaging method[53]: (a) Traditional non-correlated imaging;(b) ghost imaging.
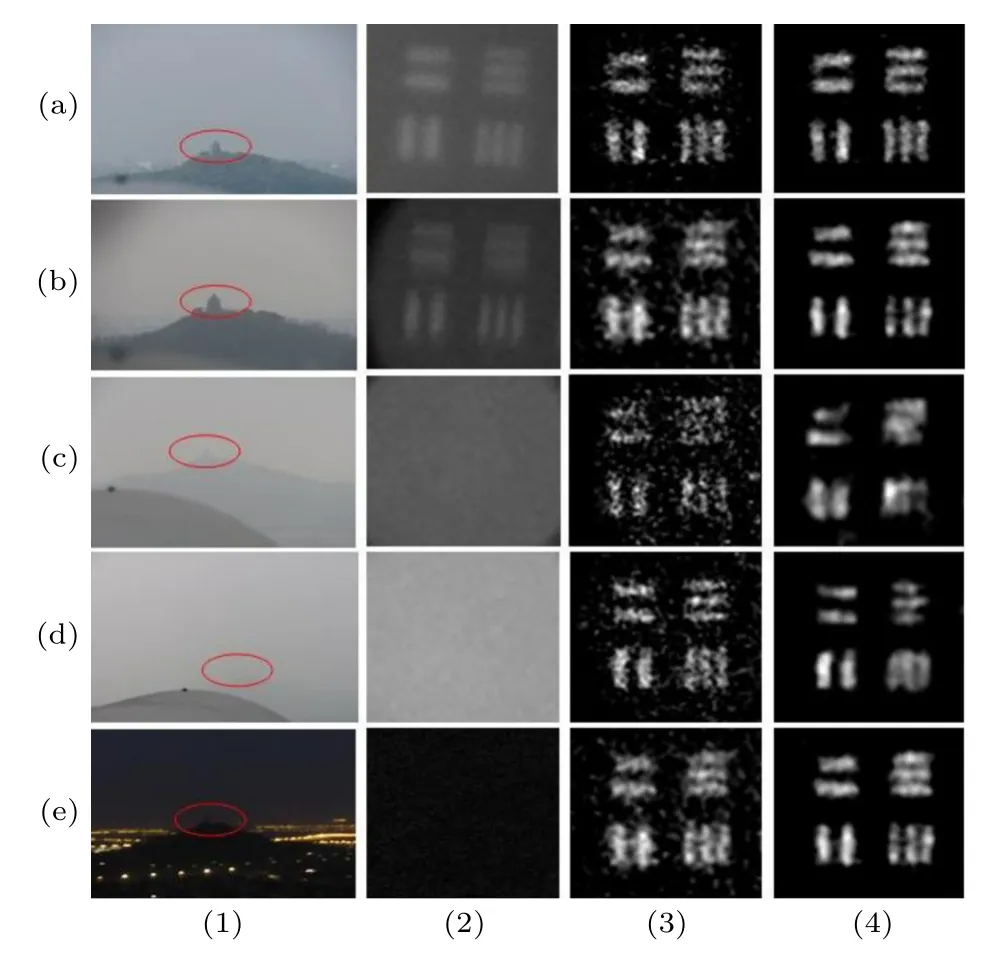
圖7 不同天氣條件下直接成像與關聯成像圖像對比,其中(a)–(e)分別代表晴朗、多云、小雨、中霧、夜晚天氣對應;(1)–(4)分別對應實地場景、傳統成像、關聯成像、基于總變分約束的關聯成像[54]Fig.7.Comparison of images between two imaging method in different weather: (a) Clear;(b) cloudy;(c) light rain;(d) moderately foggy;(e) night.Where (1) scenes of field experimental,(2) traditional imaging,(3) ghost imaging,(4) ghost imaging by TV (total variation)[54].
2015 年,Xu 等[58]在不同散射強度下對比了傳統成像與關聯成像的抗散射能力,其實驗結果如圖8 所示.隨著散射強度的增加,關聯成像不僅可以保持成像分辨率不變,而且相對傳統成像可以有效抑制圖像中的散射光的影響.研究表明,關聯成像相對傳統成像在抗擾動方面具有一定的優勢,對物體與桶探測器之間的擾動免疫.

圖8 雙縫直接成像與關聯成像結果,從(a)到(f)對應散射強度逐漸增加,β=100%,33.26%,12.14%,6.44%,3.16%,1.28%,β 表示散射介質的透過率,每一對圖像的左圖為關聯成像結果,右圖為傳統直接成像結果[58]Fig.8.Imaging results of a double slit achieved with both methods.From set (a) to (f),the strength of scattering is increasing,β=100%,33.26%,12.14%,6.44%,3.16%,1.28%,where β shows the transmission ratio of the scattering media as a measure of strength of scattering.For each set,the left one is the result of ghost imaging and the right one is that of traditional non-correlated imaging[58].
為降低大氣環境對關聯成像的影響,研究人員分別在光源、系統、算法等不同角度對關聯成像系統進行了相應的優化[59,60].此外,研究者們還積極將各種抗散射技術引入到關聯成像中.2012 年Shi 等[61]將自適應光學技術引入關聯成像中以解決大氣湍流的問題,其實驗結果如圖9 所示,圖像質量相對傳統關聯成像有明顯提升.2021 年,Li等[62]將偏振成像技術引入到關聯成像中,提出了基于直方圖預處理的水下偏振差分關聯成像方法.該方法結合了偏振成像技術以及差分關聯成像,有效地提取出了在散射介質后面的物體圖像并通過直方圖預處理進一步加強圖像對比度.2022 年,Yuan 和Chen[63]引入相位恢復算法來恢復受到嚴重散射影響的關聯成像圖像,實現了對被散射介質包圍物體圖像的恢復.
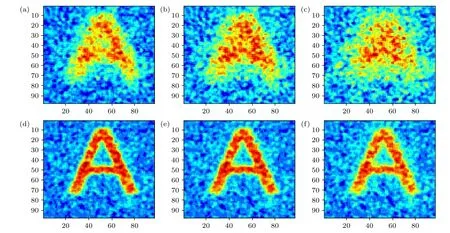
圖9 字母“A”在不同強度大氣湍流下的圖像 (a)–(c)湍流系數分別為2.0,3.2,6.8 時常規關聯成像圖像;(d)–(f)湍流系數為2.0,3.2,6.8 時自適應關聯成像圖像[61]Fig.9.Obtained images of letter “A” under different strength atmospheric turbulence: (a)-(c) Images of convention ghost imaging at turbulence coefficient of 2.0,3.2 and 6.8,respectively;(d)-(f) images of adaptive optical ghost imaging at turbulence coefficient 2.0,3.2 and 6.8,respectively[61].
近幾年還有一些新穎關聯成像抗擾動方案被相繼提出.2022 年Lin 等[64]研究發現當物臂存在散射介質擾動時,通過在參考臂加入與物臂散射介質特征相似的散射介質就可以補償散射光場的擾動相位,實現利用散射光的透過散射介質的關聯成像.2022 年,孫帥等[65]提出了一種計算波前整形的孔徑合成關聯成像方案.該方案基于計算關聯成像,以物體本身為導星利用特定的優化函數結合遺傳算法在計算參考臂光場的同時加入相位補償,有效解決了光源的相位噪聲帶來的關聯圖像退化.2020 年,Gao 等[66]使用高斯模糊核來模擬散射介質在關聯成像光路不同位置時的散射場景,并通過計算仿真的方式產生DNN 網絡的訓練數據,并實驗驗證了該DNN 神經網絡在面對不同位置的散射介質時依然能夠恢復出目標圖像.由此可見,關聯成像具有高度的開放性與靈活性,能夠很好地與計算領域的新技術相結合,取得更好的成像效果,同時有效擴展了應用場景.
4.3 回波探測與信噪甄別
針對回波探測,相關研究的側重點在于提高回波信噪比,實現高效、可靠的信噪甄別.信噪甄別,即從回波信號中盡可能識別、提取真實信號,降低背景噪聲干擾.發展高探測效率、大探測面積、高動態范圍的探測器有助于提高所接收的物體回波信號,是提高信噪比的手段之一.但此種手段僅能提高探測能力,缺乏信噪甄別能力.若噪聲與物體回波信號具有一定的關聯,如散射介質引起的后向散射、環境中與物體回波同頻率的噪聲光,僅提升探測能力并不能有效提高信噪比.而在室外關聯成像中,此類噪聲往往是干擾回波信號的主要噪聲.為獲取高質量重構圖像,對信噪甄別技術的研究必不可少.由于關聯成像所具有的如光源可主動調控、成像與優化過程可一體化等特點,基于成像架構或重構算法的信噪甄別研究也成為了研究的重要方面.
在時域對照明光場添加時域調制以實現信噪甄別是關聯成像中行之有效的甄別技術之一.2016 年,Deng 等[43]率先提出將脈沖壓縮技術、相干探測技術與關聯成像結合的方案.通過將贗熱光脈沖做啁啾幅度調制并分為兩路,一路光作為本地振蕩,另一路作為關聯成像系統的照明光源,最后用物體的回波和本振光進行相干探測,實現了低信噪比下的關聯成像.此外,也可以通過在光場調制的過程中加載周期脈沖信號作為標定,以此在回波中濾除時序上與照明調制匹配的噪聲[66].而在已知目標空間距離的條件下,基于時間門控技術[67]則可以降低非物體反射的噪聲光子,從而提高成像質量.
在頻域對圖像進行處理以提高成像質量的方式也是光學成像中常見的信噪甄別技術之一,這一方法同樣適用于室外關聯成像.在重構圖像中,物體的形狀是由空間頻率域中的低頻率決定的,而高頻率則多表示物體細節,噪聲在空間域具有典型的均勻分布,但在頻率域中往往集中在高頻區域.在部分室外成像場景下,信息獲取能力有限的情況下,通常選擇放棄細節,此時可通過對照明光場或重構圖像進行頻域變換及濾波,選擇性保留部分低頻信息,實現信噪甄別,提高圖像信噪比.
4.4 圖像重構算法、架構優化
在關聯成像中,基于算法進行重構是獲取目標圖像最后也是最關鍵的一步,算法是決定重構圖像質量的主導因素之一,也是這一成像技術能否順利應用化的關鍵因素之一.成像過程中所面臨的弱回波、低信噪比、環境干擾等問題,均可通過算法得到一定程度的解決.因此,對成像算法的優化一直是國內外各團隊的研究重點.在室外成像場景下,關聯成像算法研究目標主要集中于: 1)回波信號信噪甄別;2)成像質量的提升;3)成像應用的擴展.其中回波信號信噪甄別研究已在4.3 節中單獨列出,在此不多贅述.要介紹在提升成像質量、擴展成像應用等方面的重構算法研究.
1) 成像質量的提升
在關聯成像中,成像質量與采樣數呈現正相關關系,因此提高成像質量與降低采樣數互為表里.以最基礎的強度關聯為基礎,為實現成像質量的提高,先后出現了差分關聯成像、歸一化關聯成像、偽逆關聯成像、奇異值分解關聯成像、壓縮感知算法及基于神經網絡的重構算法等.其中對于強度關聯算法、差分關聯算法與歸一化關聯算法,可在重構過程中隨時增加采樣數據而中斷重構成像過程;對于偽逆關聯成像、奇異值分解關聯成像與壓縮感知算法,在重構時需先將參考臂數據整理為測量矩陣,而后續若要追加采樣數據,則需重啟重構過程;而基于神經網絡的重構算法由于其特殊性,無法以上述標準進行分類.
強度關聯算法如前文所述,關聯成像是一種基于雙臂光場的高階關聯,借助關聯運算以重構目標圖像的成像技術,其基礎的重構公式為
即直接強度關聯,其中IR(x,y;i) 為第i次采樣中參考臂面陣探測器所得數據,IB(i) 則為第i次采樣中探測臂桶探測器所得數據.強度關聯無需數據的預處理或額外的實驗架構,代碼簡潔、重構迅速,然而其對光源穩定性、光場的均勻性及探測信噪比水平有著較高的要求.因此,以直接強度關聯為基礎,衍生出了多種重構算法,以提升圖像重構性能.
根據光場相干度的定義將其改寫為
即可得歸一化的強度關聯.將公式由“除法”形式改寫為“減法”形式,所得即為漲落關聯算法的重構公式:
歸一化強度關聯及漲落關聯重構公式中的分母/減數項可視為受照明光場平均強度影響的背景項,因而除法/減法運算使得歸一化強度關聯與漲落關聯能夠在一定程度上排除照明光場不均勻所帶來的影響,提高圖像對比度,從而實現成像質量的提升.
差分關聯成像算法與歸一化關聯成像算法在關聯成像中,當目標為高透過率或反射率的目標物體時,在有限次采樣條件下,原本依賴光強漲落所體現的物體信息淹沒于較強的光場平均強度,成像質量難免受到其影響.為解決這一問題,Ferri 等[29]于2010 年提出了差分關聯成像(differential ghost imaging,DGI).在差分關聯算法中,需將參考臂端將面陣探測器所采集數據求和以模擬桶探測器,并將模擬結果引入到重構運算中,其重構公式如下:
在差分關聯成像的基礎之上,Sun 等[30]于2012 年提出了歸一化關聯成像(normalized ghost imaging,NGI),其重構公式可概括為
其中ONGI(x,y) 為DGI 所得重構圖像.
對比歸一化強度關聯與強度關聯算法,可見NGI 同樣是引入了光場強度均值作為分母項以排除光場平均強度非均勻所帶來的干擾,從而在光場平均強度出現明顯的漲落時,在DGI 的基礎之上進一步提高成像質量.圖10 為文獻[68]中的結果圖,以在同一條件下展示不同重構算法所得重構圖像間的差異.
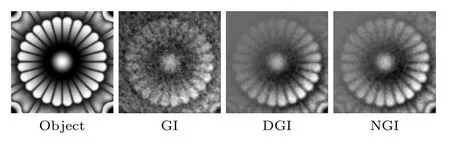
圖10 不同算法所得重構圖像對比[68]Fig.10.Images reconstructed by different algorithms[68].
偽逆關聯成像與奇異值分解關聯成像如前文所示,具有正交性的光場能夠較好地壓制背景噪聲及環境噪聲.當照明光場自身不具備正交性時,則可通過算法對其進行處理,通過正交變化,為其“賦予”正交性.
在偽逆關聯成像(pseudo-inverse ghost imaging,PGI)中,通過將采樣過程中所得的全部照明光場整理為測量矩陣,求解測量矩陣的偽逆矩陣,將其與探測臂數據所整理而成的向量進行重構運算,實現圖像重構的同時有效提高成像的信噪比[69,70].圖11 為文獻[69,70]的實驗結果圖,直觀地展現了偽逆鬼成像對成像質量的提升效果.
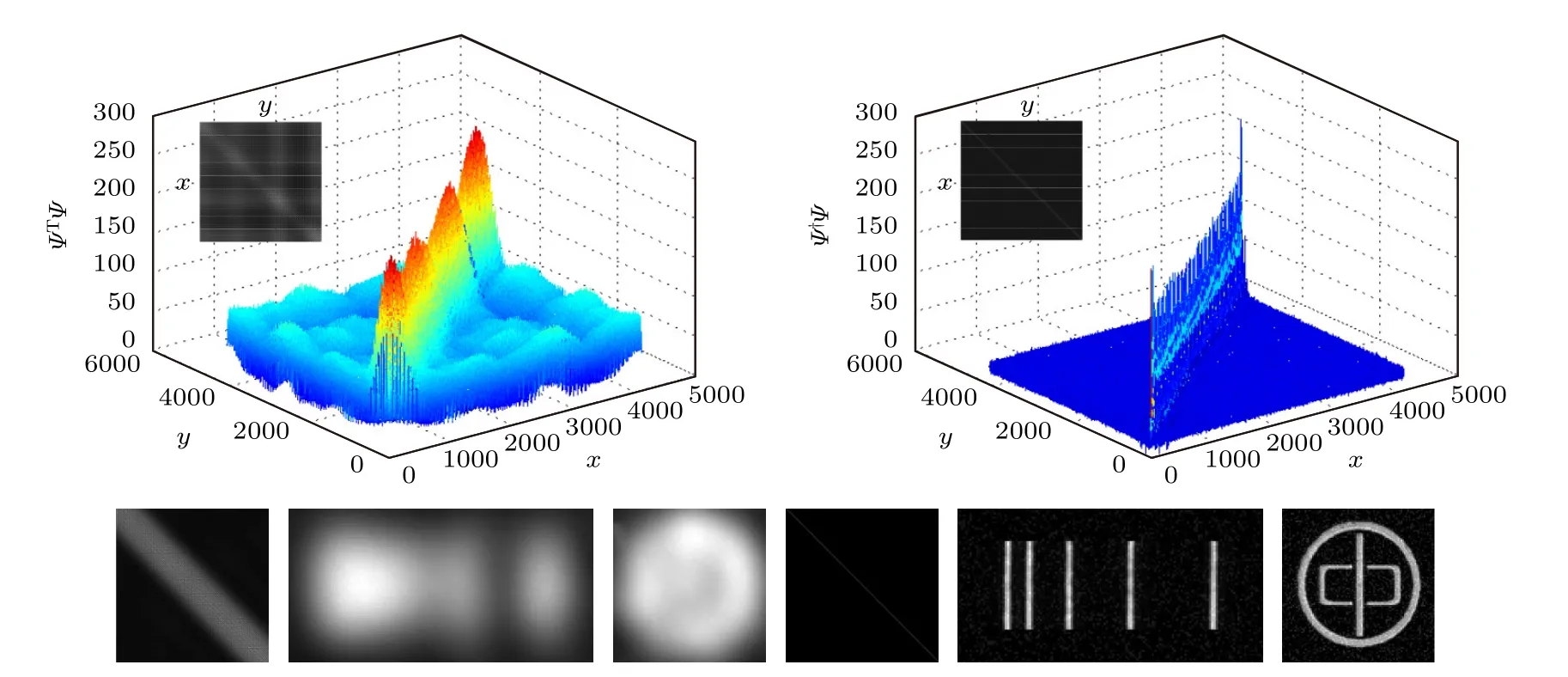
圖11 強度關聯算法與偽逆鬼成像重構結果圖[69,70]Fig.11.Images reconstructed by GI and PGI[69,70].
與PGI 相似,由Zhang 等[71]于2018 年提出的奇異值分解關聯成像(singular value decomposition ghost imaging,SVDGI)同樣實現了照明光場的“正交化”.與PGI 所不同的是,SVDGI 選擇了奇異值正交分解這一方法來實現測量矩陣的“正交化”.
壓縮感知算法壓縮感知(compressive sensing,CS)技術最初是為了突破香農采樣定理,以更低的采樣頻率實現原始信號的重構.其理論基礎為當具有稀疏性時,通過非均勻采樣可以遠低于奈奎斯特采樣率的采樣數準確還原原始信號.壓縮感知算法最初由Katz 等[71]于2009 年引入關聯成像,隨后白旭等[72,73]對不同類型的壓縮感知算法進行了詳盡的分析或優化.
壓縮感知的流程可大致分為: 信號的稀疏表示、非相干測量與信號重建.信號的稀疏表示是指借助正交完備字典或過完備字典將原始測量信號以更為簡潔的形式進行表達.非相干測量是指測量矩陣與字典間的不相干.信號的重建則是指利用凸優化算法、貪婪算法以及貝葉斯壓縮感知重構算法等從稀疏信號中恢復出原始信號的過程,根據所用的過完備字典或凸優化算法等不同,基于壓縮感知技術衍生出了多種不同的算法,如基于稀疏約束壓縮感知算法、正交追蹤匹配算法、多選正交最小二乘算法等.
雖然不同類型的壓縮感知算法其成像效果各不相同,但總體而言,相較于其他重構算法壓縮感知算法在成像質量方面具有顯著優勢,此外,在重構的過程中壓縮感知雖未改變每次采樣中所獲取的信息量,但其理論基礎則帶來了“物體具有稀疏性”這一額外信息,可視作降低了重構目標所需的總信息量,因而能夠降低成像所需的采樣數.此外,這一約束也抑制了重構時光場像素間的相關性,進而提高了成像分辨率.遺憾的是相較于前述各類算法,壓縮感知算法在進行圖像重構時所需的運算時間與空間遠超其他算法,且對探測噪聲較為敏感,限制了其在關聯成像中的應用.
基于神經網絡的關聯成像重構算法作為機器學習算法中最受歡迎的算法,神經網絡算法細分出了卷積神經網絡、對抗神經網絡、極限學習機等不同類型的算法,其應用領域廣泛涉及到信息科學、計算機科學、生物醫學、數理科學等學科領域中.算法的核心思路在于模擬神經系統,搭建輸入層、隱藏層、輸出層三層結構的網絡體系,以大量數據進行訓練,從而建立輸入特征與所求結果間的對應關系.這一類算法最初由中國科學院上海光學精密機械研究所司徒國海小組[34]于2017 年引入關聯成像領域中,隨后Shimobaba 等[74]、Higham等[75]研究人員投入到了相關研究中.
與其他重構算法相比,基于神經網絡的重構算法其重構原理、效果都更為依賴所使用的網絡其本身的性能,而非關聯成像這一技術其背后的物理原理,故在此不進行詳細討論.
2) 成像應用的擴展
由于在關聯成像中獲取單張圖像需要進行多次的采樣,在這一過程中難以確保目標與照明光場保持相對靜止,因此在室外成像條件下,困擾關聯成像應用的主要場景之一為對運動目標進行成像.本節介紹兩類對運動目標進行追蹤與成像的關聯成像方法.
基于圖像的動目標成像算法Sun 等[37]提出了一種基于圖像互相關的動目標成像算法(corsscorrelation-based ghost imaging,CBGI).在該算法中,研究人員將成像過程劃分為多個階段,在每個階段中基于采集數據進行一次圖像重構,其后計算相鄰兩階段重構圖像互相關.互相關函數的峰值坐標中隱含了目標的位移與旋轉角度信息,據此可獲取目標的空間狀態,從而后續成像過程中調整照明光場,使照明光場與運動目標保持相對靜止,在實現對運動目標追蹤的同時實現了對動目標的高質量成像,解決了動目標場景下高成像速率需求與關聯成像大采樣數需求間的矛盾.其實驗結果如圖12 所示.圖中K表示采樣分段后,當前成像所用的數據為從初始時刻到完成第K段采樣的數據.
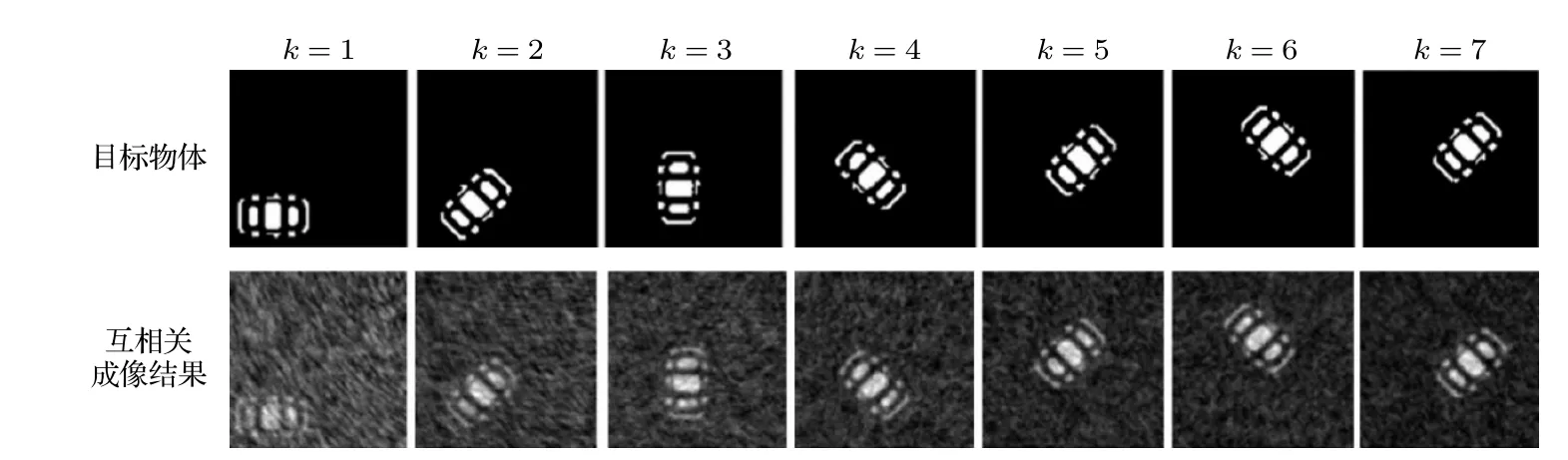
圖12 基于互相關的運動目標成像結果[37]Fig.12.Results of CBGI with moving object[37].
與之相類似,Zha 等[39]提出了一種基于圖像多階矩的動目標成像算法.與CBGI 不同的是,在該算法中,通過對比每個階段所得重構圖像的低階矩,從而獲取了在采樣過程中目標物體的運動信息并據此調整后續光場,實現對運動目標的成像與追蹤.其中目標空間位置信息由圖像一階矩計算可得,目標的旋轉角度由圖像二階矩計算可得.在該方案中,為精確計算目標的空間坐標及旋轉角度,研究人員采用了壓縮感知算法進行圖像重構以抑制背景噪聲.其實驗結果如圖13 所示.圖中K表示采樣分段后,當前成像所用的數據為從初始時刻到完成第K段采樣的數據.
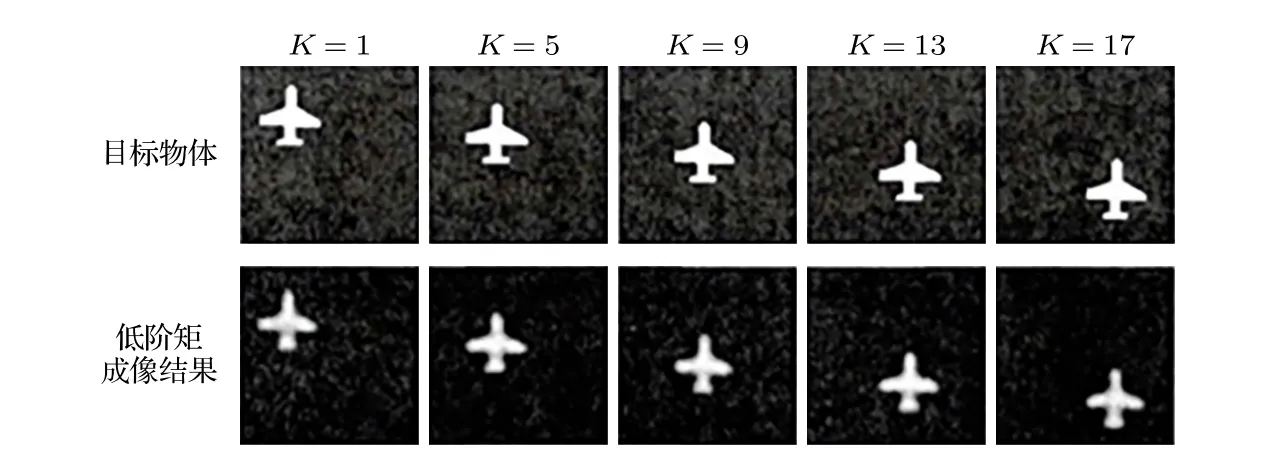
圖13 基于低階矩的運動目標成像結果[39]Fig.13.Results of GI based on low-order moments with moving object[39].
基于桶探測信號的動目標成像算法關聯成像系統利用桶探測回波與參考光場的關聯獲取目標圖像信息.因此,利用關聯成像系統自身的回波信號變化也可以實現對運動目標的跟瞄追蹤.Du等[41]提出了一種運動目標追蹤與成像方法,基于四象限探測器,通過對關聯成像系統自身的回波信號特征及變化的測試分析確定其運動方向,并實時反饋以調整照明范圍,實現對目標的實時跟蹤與準靜止成像.由于無需進行采樣分段及圖像重構,因此該方法極大地提升了追蹤速度與精度.其實驗結果如圖14 所示.
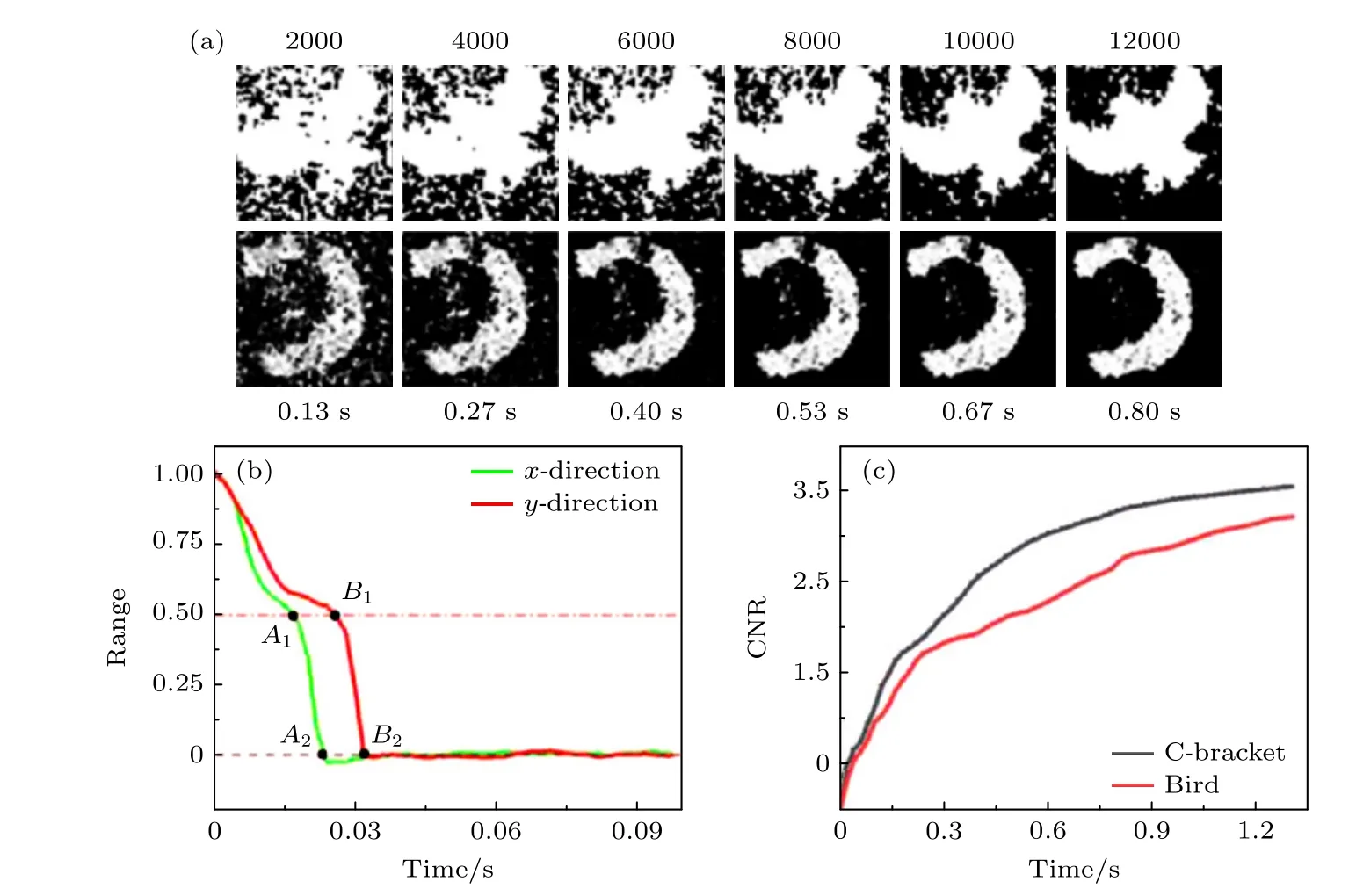
圖14 四象限跟蹤成像方法實驗結果[41] (a) 成像結果;(b)目標追蹤結果;(c)成像質量隨時間變化曲線Fig.14.Experimental results of GI based on four-quadrant detector[41]: (a) Results of imaging;(b) trajectory of the moving object;(c) quality of reconstructed images over time.
Zha 等[40]提出了一種單像素成像方法的實時跟蹤方法.在該方法中,照明光場被分為多組,每組中對同一張光場分別以勻強、水平遞增、垂直遞增的方式進行灰度調制,因此對于探測器所收集的回波進行相應強度計算,即可得成像區域圖像的零階矩與一階矩,進而實時重建和跟蹤快速移動物體的質心.其實驗結果如圖15 所示.該方法僅實現對目標的跟蹤,無法進行成像.
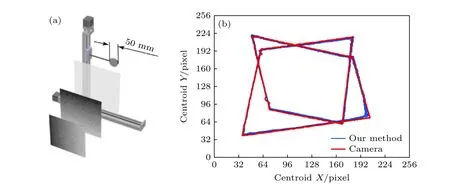
圖15 實時追蹤方法實驗結果[40] (a)實驗架構示意圖;(b)相機追蹤軌跡(紅)與算法計算所得軌跡(藍)Fig.15.Experimental results of the real-time online tracking of a moving object[40]: (a) Experimental framework diagram;(b) camera tracking track (red) and algorithm calculated track (blue).
5 室外關聯成像技術研究展望
室外關聯成像技術朝著更高分辨率、更大工作距離、更大視場、更高分辨率及全天時甚至全天候發展.面向實際應用,我們提出以下4 個方面的發展建議.
1)主被動成像方式相結合與傳統的被動成像方式相比,關聯成像成像速率不佳且探測視場有限,其主要原因在于多次采樣的需要及調制光源的刷新速率受限、照明范圍受限.優點則在于信息維度豐富、不受天時限制.相較之下,被動成像利用物體自身輻射或反射的環境光,具有更廣的探測視場且成像速率僅受信號積累需求限制.因此將主被動成像方式相結合,相互彌補對方的不足,可以成為室外關聯成像技術向應用發展的一個方向.
2)研制高靈敏、高帶寬探測器在室外關聯成像中,遠距離、大視場、高信噪比成像是其發展的必然需求.依據雷達公式,激光能量隨著成像距離的增加而急劇下降,因此高靈敏的探測器愈加重要.另外,為盡可能實現實時成像,需要探測器在短時間內獲得物體或場景的信息.低光通量、短時間探測使得探測器捕獲的光子數極為有限,探測信號的信噪比極低.因此研制高靈敏、高信息帶寬的探測器尤為重要.
3)研究高效信噪甄別技術與重構算法高靈敏探測使得關聯成像能夠探測更微弱的回波信號,賦予其比傳統成像具有更遠成像距離的潛力,但這也意味著探測器對噪聲同樣更加敏感,因而需要更精準的信噪甄別技術.除了前文所述的匹配濾波、頻域濾波、光場設計等方式外,優秀降噪算法的開發也是重要的研究方向之一.
4)發展抗大氣干擾成像技術室外成像中無法規避的另一個問題是大氣環境對成像的影響.大氣湍流具有隨機、易變、難預測的特點,其對光場的擾動在一定程度上破壞了關聯成像光場間的相關性,降低成像分辨率的同時影響了圖像質量.如前文所述,研究人員已于光源、算法、實驗方案等方面展開了相關研究,而為推進室外關聯成像的研究與應用,進一步發展相應的抗大氣干擾成像技術有著重要意義.
6 結語
在當前研究中,關聯成像的應用領域已擴展到圖像加密、生物醫學、遙感探測、雷達探測等多個領域.關聯成像特殊的硬件架構使得這一成像技術相較于其他光學成像方式,在解決室外成像所面臨的困境時具有一定的優勢.其所具有的主動照明、可控光場調控等特點有助于應對室外成像環境中弱回波、強噪聲及大氣干擾等問題.而其所必須的算法重構過程使得在成像過程中可以對成像系統進行實時且具有針對性的調整,以助其取得更好的成像效果.但關聯成像的成像速率、視場及重構圖像質量均有所限制,制約了這一成像技術的應用化.因此,開展室外關聯成像的相關研究,進一步提升成像質量、擴展成像視場、壓縮成像耗時,促進其在室外探測與成像領域的應用有著重要意義.
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42
