基于DoDAF 的無(wú)人直升機(jī)輔助反潛作戰(zhàn)系統(tǒng)建模分析研究
2023-09-28 09:10:46李恒
中國(guó)科技縱橫 2023年14期
李 恒
(中國(guó)直升機(jī)設(shè)計(jì)研究所,江西景德鎮(zhèn) 333001)
0 引言
近年來(lái),隨著戰(zhàn)爭(zhēng)向信息化、無(wú)人化方向發(fā)展,無(wú)人直升機(jī)的軍事應(yīng)用價(jià)值得到高度重視,進(jìn)入加速發(fā)展的時(shí)期,其中以“火力偵查兵”最為典型。無(wú)人直升機(jī)具有使用風(fēng)險(xiǎn)小、成本低、任務(wù)能力強(qiáng)的優(yōu)點(diǎn),最重要的是它可代替有人機(jī)來(lái)執(zhí)行特殊作戰(zhàn)任務(wù),大大提高了任務(wù)安全性[1]。在現(xiàn)代海戰(zhàn)中,阻止敵方力量使用魚(yú)雷等武器發(fā)射有利地形是水面艦艇編隊(duì)近程防御的重要目標(biāo)。考慮到目前我國(guó)潛在對(duì)手潛艇裝備的反艦魚(yú)雷有效攻擊距離,編隊(duì)近程防御反潛作戰(zhàn)半徑應(yīng)不小于50km。由于“安靜型”潛艇輻射噪聲明顯降低,導(dǎo)致了聲納探潛手段效能的大幅度下降,而當(dāng)派遣反潛直升機(jī)近距離精準(zhǔn)探測(cè)時(shí),危險(xiǎn)性提高。這時(shí),無(wú)人直升機(jī)的優(yōu)點(diǎn)彰顯無(wú)遺。無(wú)人直升機(jī)攜帶磁探儀或其他精準(zhǔn)探測(cè)設(shè)備近距離輔助探潛,發(fā)現(xiàn)目標(biāo),再派上反潛直升機(jī)進(jìn)行打擊,有力地發(fā)揮有人反潛直升機(jī)作戰(zhàn)平臺(tái)的協(xié)同作戰(zhàn)優(yōu)勢(shì)。很大程度上增強(qiáng)了海上編隊(duì)的體系作戰(zhàn)能力[2]。
DoDAF 本質(zhì)上是屬于開(kāi)發(fā)體系結(jié)構(gòu)的基本框架之一,該方法具有實(shí)用性強(qiáng)的特點(diǎn)。當(dāng)前,美軍集成與開(kāi)發(fā)系統(tǒng)的主要標(biāo)準(zhǔn)便是基于該體系架構(gòu),國(guó)內(nèi)一些單位也運(yùn)用DoDAF 理論指導(dǎo)產(chǎn)品設(shè)計(jì)和模型構(gòu)建,進(jìn)行了一些卓有成效的工作。在研究DoDAF 體系結(jié)構(gòu)開(kāi)發(fā)理論基礎(chǔ)上,本文提出了一種無(wú)人直升機(jī)輔助有人直升機(jī)探潛系統(tǒng)模型構(gòu)建方法,從根本上闡明了無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)的活動(dòng)過(guò)程,可對(duì)無(wú)人直升機(jī)輔助有人直升機(jī)作戰(zhàn)體系流程設(shè)計(jì)和作戰(zhàn)指揮控制給予有效的支撐。
1 作戰(zhàn)體系結(jié)構(gòu)設(shè)計(jì)
1.1 DoDAF 建模思想
該種體系架構(gòu)建模思路主要分為兩步:第一步將整個(gè)作戰(zhàn)體系模型的構(gòu)建劃分為易于區(qū)分的幾個(gè)階段;第二步按照作戰(zhàn)階段中各階段側(cè)重點(diǎn)解決不同的建模問(wèn)題。這種方法的優(yōu)點(diǎn)是逐步推進(jìn)系統(tǒng)模型的構(gòu)建,減少了整套系統(tǒng)模型設(shè)計(jì)的難度,便于清晰地獲得每一步的工作重點(diǎn),使得整個(gè)建模過(guò)程更加簡(jiǎn)單明了,容易被各行各業(yè)工作人員快速掌握[3]。各個(gè)工作階段都明確確立了任務(wù)完成的目標(biāo)和要求,一旦發(fā)生問(wèn)題,立刻就在當(dāng)前階段處理消除,進(jìn)行最終的仿真驗(yàn)證[4],而不必等到所有工作完成,通過(guò)“化整為零”的方法提高設(shè)計(jì)效率。
1.2 作戰(zhàn)體系結(jié)構(gòu)輸出成果
DoDAF 體系結(jié)構(gòu)根據(jù)需要定義了一系列的標(biāo)準(zhǔn)視圖,即輸出產(chǎn)品。從各個(gè)維度體現(xiàn)參與作戰(zhàn)的各方系統(tǒng)信息的組織架構(gòu)。對(duì)無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)體系進(jìn)行設(shè)計(jì)的主要任務(wù)是描述整個(gè)作戰(zhàn)系統(tǒng)支持的作戰(zhàn)體系概念,這種作戰(zhàn)概念的主要內(nèi)容包括完成無(wú)人直升機(jī)反潛任務(wù)的活動(dòng)、參與人員之間的數(shù)據(jù)流通、體系關(guān)鍵要素等,表1 列出了主要作戰(zhàn)視圖產(chǎn)品。

表1 DoDAF作戰(zhàn)視圖產(chǎn)品及相關(guān)說(shuō)明
1.3 作戰(zhàn)體系結(jié)構(gòu)設(shè)計(jì)
整個(gè)作戰(zhàn)體系結(jié)構(gòu)產(chǎn)品之間相互關(guān)聯(lián),并且相互依賴(lài)。因此,可按照以下步驟進(jìn)行作戰(zhàn)體系結(jié)構(gòu)設(shè)計(jì)[5]。
(1)確立高級(jí)作戰(zhàn)概念圖(OV-1)。高級(jí)概念圖是用文字或圖形對(duì)相關(guān)內(nèi)容進(jìn)行描述的一種方式,有利于高級(jí)決策者之間進(jìn)行交流。圖形化的描述作戰(zhàn)想定過(guò)程,分析作戰(zhàn)概念、作戰(zhàn)使命等。
(2)明確作戰(zhàn)節(jié)點(diǎn)、作戰(zhàn)活動(dòng)和組織指揮關(guān)系。包括OV-2、OV-5 和OV-4。OV-2 包含作戰(zhàn)節(jié)點(diǎn)、連接關(guān)系以及信息交互要求等內(nèi)容;OV-5 則是對(duì)主要作戰(zhàn)活動(dòng)的層次關(guān)系以及作戰(zhàn)活動(dòng)相互間的輸入、輸出關(guān)系進(jìn)行描述和闡明;OV-4 的主要目的則是對(duì)組織、組織類(lèi)型、人員角色以及它們間的指揮關(guān)系進(jìn)行描述。
(3)確定作戰(zhàn)事件,即OV-6c。OV-6c 是用來(lái)描述在特定的作戰(zhàn)場(chǎng)景下,作戰(zhàn)節(jié)點(diǎn)間的信息交換隨時(shí)間的變化過(guò)程。
(4)確定單個(gè)節(jié)點(diǎn)內(nèi)部狀態(tài)轉(zhuǎn)移關(guān)系,即OV-6b。OV-6b 是用于描述單個(gè)作戰(zhàn)節(jié)點(diǎn)的響應(yīng),描述單個(gè)作戰(zhàn)節(jié)點(diǎn)在不同的作戰(zhàn)事件影響下,其允許的作戰(zhàn)狀態(tài)及狀態(tài)轉(zhuǎn)移過(guò)程。
2 輔助反潛作戰(zhàn)體系結(jié)構(gòu)建模設(shè)計(jì)與驗(yàn)證
無(wú)人直升機(jī)輔助有人直升機(jī)反潛的作戰(zhàn)流程是:艦隊(duì)指揮平臺(tái)派遣一架無(wú)人直升機(jī)到可疑區(qū)域,利用磁探儀等設(shè)備對(duì)敵潛艇進(jìn)行精準(zhǔn)探潛,當(dāng)探測(cè)到敵潛艇的目標(biāo)信息時(shí),無(wú)人直升機(jī)將目標(biāo)信息通過(guò)衛(wèi)星發(fā)送給艦船指揮平臺(tái),艦船指揮平臺(tái)在接收到目標(biāo)信息后,通過(guò)衛(wèi)星向無(wú)人直升機(jī)以及反潛直升機(jī)發(fā)送任務(wù)命令,無(wú)人直升機(jī)根據(jù)接收到的命令,組織通信預(yù)案,向反潛直升機(jī)發(fā)送目標(biāo)指示信息。與此同時(shí),反潛直升機(jī)接收到指揮平臺(tái)發(fā)送的經(jīng)處理過(guò)的敵潛艇指示信息,根據(jù)艦船指揮平臺(tái)發(fā)送的處理后的敵潛艇指示信息以及無(wú)人直升機(jī)發(fā)送的目標(biāo)指示信息,對(duì)目標(biāo)實(shí)施打擊。
2.1 模型的設(shè)計(jì)
本文依據(jù)無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)需求,基于DoDAF 開(kāi)發(fā)模型的規(guī)律,制定作戰(zhàn)模型開(kāi)發(fā)步驟。
(1)高級(jí)作戰(zhàn)概念圖OV-1
在本設(shè)計(jì)中,OV-1 是對(duì)無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)的一種高層次的圖形描述。它宏觀(guān)地描述了輔助反潛的作戰(zhàn)過(guò)程,便于各層次設(shè)計(jì)者之間的交流,根據(jù)作戰(zhàn)流程的描述,在輔助反潛作戰(zhàn)體系中,主要參與者有無(wú)人直升機(jī)、艦隊(duì)指揮平臺(tái)、反潛直升機(jī)、衛(wèi)星、敵潛艇。其高級(jí)作戰(zhàn)概念圖如圖1 所示。
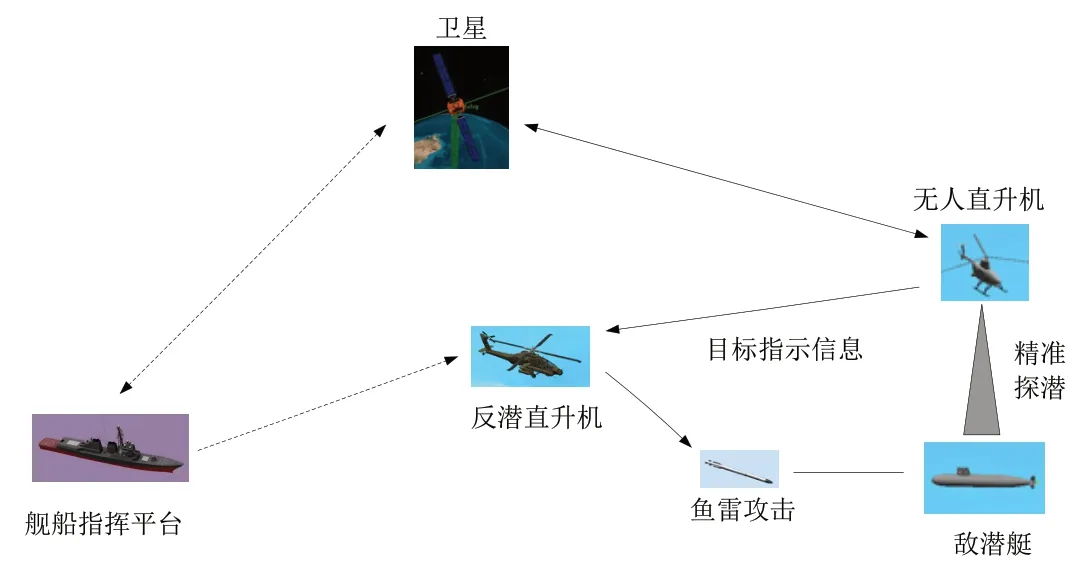
圖1 OV-1高級(jí)作戰(zhàn)概念圖
(2)組織關(guān)系圖OV-4
本研究場(chǎng)景中主要組織角色有:艦船指揮平臺(tái)、衛(wèi)星、反潛直升機(jī)、無(wú)人直升機(jī)等,其中艦船指揮平臺(tái)是本輔助反潛場(chǎng)景作戰(zhàn)活動(dòng)的組織者,其他組織角色均為該平臺(tái)指揮者(除敵潛艇外),故其組織角色如圖2 所示。

圖2 OV-4組織關(guān)系圖
(3)作戰(zhàn)活動(dòng)模型OV-5
OV-5 主要研究?jī)?nèi)容為無(wú)人直升機(jī)輔助有人直升機(jī)反潛時(shí),整個(gè)作戰(zhàn)體系內(nèi)所包含的作戰(zhàn)要素以及作戰(zhàn)活動(dòng)之間的關(guān)系。無(wú)人機(jī)作戰(zhàn)能力、各個(gè)作戰(zhàn)活動(dòng)之間數(shù)據(jù)流交互是它的主要內(nèi)容,并且數(shù)據(jù)流的去向、作戰(zhàn)活動(dòng)的前后順序和相互關(guān)系都是它要描述的主要內(nèi)容。由本場(chǎng)景可知,其作戰(zhàn)主要活動(dòng)為精準(zhǔn)探潛、作戰(zhàn)指揮和魚(yú)雷打擊3個(gè)活動(dòng),3 個(gè)活動(dòng)又可劃分為探測(cè)目標(biāo)、發(fā)送目標(biāo)指示信息、命令決策、目標(biāo)指令、火控解算、接收指令、打擊7個(gè)二級(jí)子活動(dòng),由此建立的作戰(zhàn)活動(dòng)模型如圖3 所示。

圖3 OV-5作戰(zhàn)活動(dòng)模型
(4)作戰(zhàn)節(jié)點(diǎn)連接圖OV-2
根據(jù)OV-5 確定OV-2,根據(jù)本作戰(zhàn)場(chǎng)景,主要作戰(zhàn)節(jié)點(diǎn)含衛(wèi)星節(jié)點(diǎn)、指揮節(jié)點(diǎn)和反潛節(jié)點(diǎn)等,作戰(zhàn)節(jié)點(diǎn)間的連接關(guān)系和信息交互主要是命令指令和情報(bào)上報(bào)。OV-2 清晰地表述衛(wèi)星節(jié)點(diǎn)、指揮節(jié)點(diǎn)和反潛節(jié)點(diǎn)之間的命令指令和情報(bào)上報(bào)信息,如圖4 所示。

圖4 OV-2作戰(zhàn)節(jié)點(diǎn)連接圖
(5)作戰(zhàn)事件跟蹤描述圖OV-6c
OV-6c 定義了作戰(zhàn)事件的跟蹤描述,描述各主要作戰(zhàn)節(jié)點(diǎn)在整個(gè)作戰(zhàn)過(guò)程中信息動(dòng)態(tài)的時(shí)序邏輯[6]。OV-6c 在本研究中定義了無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)中各個(gè)作戰(zhàn)節(jié)點(diǎn)間的信息交換活動(dòng)的任務(wù)事件序列,如圖5、圖6 所示。

圖5 作戰(zhàn)事件跟蹤描述圖OV-6c(邏輯關(guān)系)

圖6 OV-6c作戰(zhàn)事件跟蹤描述圖(DoDAF描述)
(6)作戰(zhàn)狀態(tài)轉(zhuǎn)換描述OV-6b
作戰(zhàn)狀態(tài)轉(zhuǎn)換描述主要是通過(guò)圖形的方法描述作戰(zhàn)節(jié)點(diǎn)相應(yīng)的狀態(tài)變化,可把輔助探潛主要作戰(zhàn)活動(dòng)的順序清晰地描述出來(lái),作戰(zhàn)場(chǎng)景中每個(gè)對(duì)象都對(duì)應(yīng)著一個(gè)OV-6b,本研究?jī)H列出艦載指揮中心的OV-6b,如圖7 所示。

圖7 艦船指揮中心作戰(zhàn)狀態(tài)轉(zhuǎn)換描述OV-6b
2.2 模型的驗(yàn)證
將無(wú)人機(jī)輔助反潛作戰(zhàn)體系結(jié)構(gòu)模型導(dǎo)入DoDAF 模型驗(yàn)證工具進(jìn)行對(duì)比驗(yàn)證,對(duì)比模型驗(yàn)證工具中流程的實(shí)際運(yùn)行狀態(tài)與預(yù)期的作戰(zhàn)流程是否一致,以一致性結(jié)果的吻合度來(lái)判斷無(wú)人機(jī)輔助反潛模型設(shè)計(jì)是否合理[7]。實(shí)驗(yàn)中將設(shè)計(jì)好的作戰(zhàn)狀態(tài)模型OV-6b 和OV-6c 導(dǎo)入到體系結(jié)構(gòu)模型驗(yàn)證工具中,并定義相關(guān)消息驅(qū)動(dòng),運(yùn)行后得到如圖8 所示的時(shí)序圖。從運(yùn)行時(shí)序圖看出,軟件運(yùn)行結(jié)果的邏輯與作戰(zhàn)事件跟蹤描述OV-6c 預(yù)期一致,符合無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)系統(tǒng)軍事需求和設(shè)計(jì)需求。
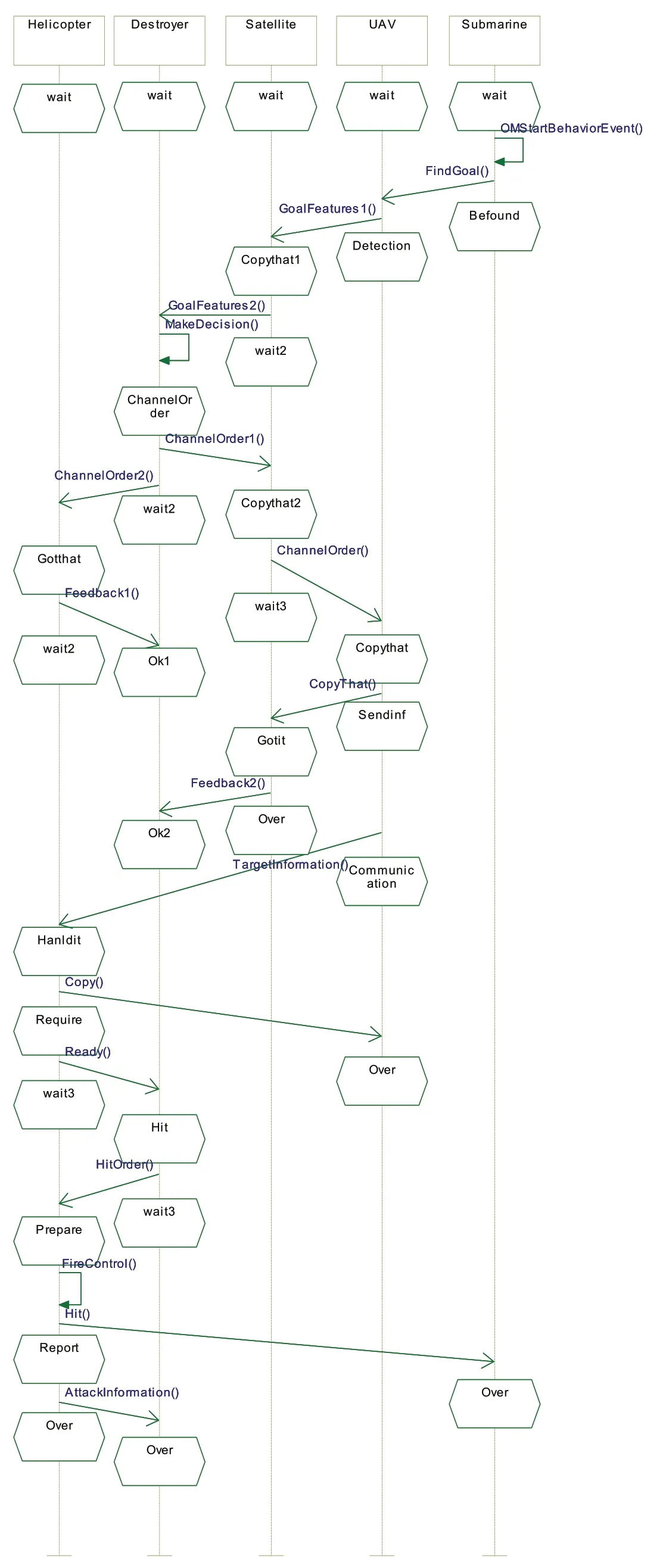
圖8 運(yùn)行結(jié)果時(shí)序圖
3 結(jié)語(yǔ)
在對(duì)美國(guó)國(guó)防部體系結(jié)構(gòu)框架深入研究的基礎(chǔ)上,完成了無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)系統(tǒng)作戰(zhàn)視圖的分析與設(shè)計(jì),闡明了無(wú)人直升機(jī)輔助有人直升機(jī)反潛作戰(zhàn)系統(tǒng)的角色、組成、活動(dòng),并進(jìn)行動(dòng)態(tài)仿真來(lái)驗(yàn)證模型,結(jié)果表明該方法合理可行。基于該方法建立的模型易于理解,有助于為無(wú)人直升機(jī)輔助反潛作戰(zhàn)方式的流程設(shè)計(jì)和風(fēng)險(xiǎn)規(guī)避提供技術(shù)支撐,為無(wú)人直升機(jī)反潛技術(shù)的發(fā)展提供一定的參考。
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
少先隊(duì)活動(dòng)(2022年5期)2022-06-06 03:45:04
家庭科學(xué)·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年2期)2021-08-22 07:31:10
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
海峽姐妹(2018年3期)2018-05-09 08:20:40
中華手工(2017年2期)2017-06-06 23:00:31
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中外會(huì)展(2014年4期)2014-11-27 07:46:46
