基于多媒體網絡的艦船圖像定位自動匹配系統設計
2023-09-16 09:16:04吳正英
艦船科學技術 2023年16期
吳正英
(廈門海洋職業技術學院,福建 廈門 361102)
0 引 言
為了對航行安全性提供保障,需要對船舶進行實時定位、跟蹤,以便實時掌握船舶航行狀態,同時,在海上發生航行事故時,相關部門能夠在第一時間收到相關事故信息并及時進行相應處理。
目前,船舶定位主要依靠衛星定位系統,比如美國的GPS(Global Positioning System),中國“北斗”系統,結合電子海圖顯示與信息系統(Electronic Chart Display and Information System)和船舶自動識別系統(Automatic Identification System)對船舶進行定位、追蹤。
國內外對船舶定位都進行了較多研究,李陽[1]設計了基于北斗三號的船舶定位系統,定位精度可達4 m 以內;范曉鋒等[2]對基于智能自組網的船舶定位以及身份識別進行研究;陳宇[3]研究了物聯網結構優化下的多源定位方法。本文基于多媒體網絡技術,提出一種通過圖像自動匹配定位的系統,能夠實時、快速地處理信息,對船舶的安全航行提供了可靠的保障。
1 多媒體網絡技術
1.1 多媒體網絡的組成
多媒體采用的是數字信號,可以綜合處理圖片、視頻等多種信息,數據形式比較豐富;多媒體提供了易操作并十分友好的界面,更加直觀、便利地實現人機交互;同時,多媒體可以很方便地與各種外部設備實現連接,可以實現數據交換、監視控制等各種功能。由于具備這些顯著優點,多媒體網絡技術已經廣泛地應用于生產、教學等多個領域。多媒體網絡的主要構成和工作原理如圖1 所示。

圖1 多媒體網絡組成及工作原理示意圖Fig.1 Multimedia network composition and working principle schematic diagram
數據采集模塊完成對所需圖像、文字等各種信息的采集,經過數模轉換得到大量的數字信號,經過壓縮處理,去除冗余信息,再對圖像、視頻進行增強等處理,傳輸至終端顯示器及控制臺,控制臺也會根據用戶需求對所需信息進行設定、篩選,再將指令發送給信息處理模塊(圖1 中虛線部分)。終端顯示器可以是多個用戶,每個用戶都可以對所生成的信息進行挑選。
1.2 多媒體網絡中的關鍵技術
1.2.1 文件壓縮
文件壓縮是指處理掉數據中的冗余部分,而保留確定需要或有關的信息,去掉不需要或無關的信息,這里的冗余主要包括空間冗余、時間冗余、結構冗余、視覺冗余等。
文件壓縮編碼的方法按原始數據是否有損失可分為有失真編碼和無失真編碼,按編碼原理分為預測編碼、變化編碼、統計編碼等。
預測編碼是根據已經編碼重建后的像素值預測待編碼的像素值,對原始值和預測值的差值進行編碼,預測編碼可以分為差分脈沖編碼調制(Differential Pulse Code Modulation,DPCM)和自適應差分脈沖編碼調制(Adaptive Pulse Code Modulation,ADPCM),其原理圖如圖2 所示。
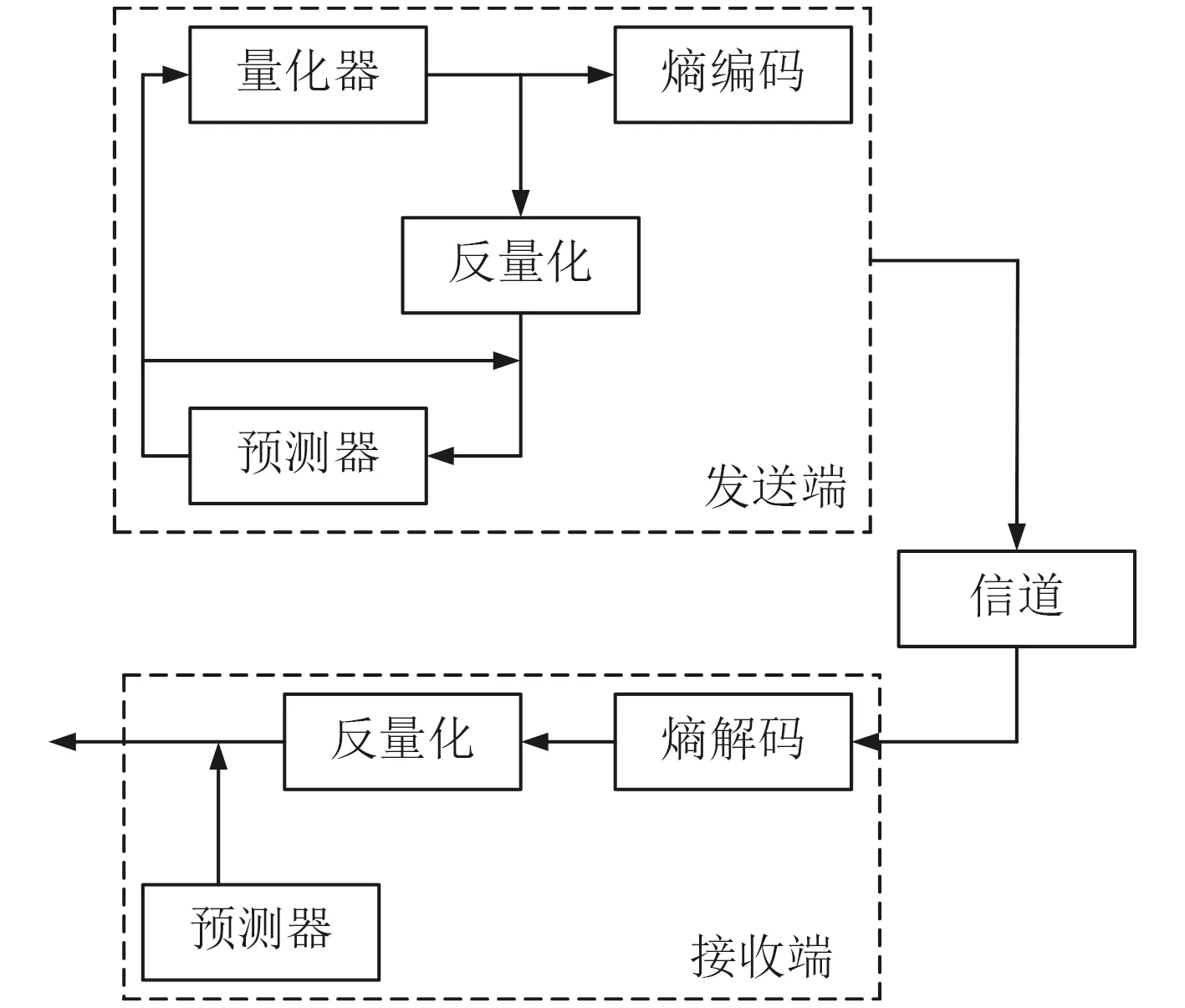
圖2 預測編碼工作原理Fig.2 Working principle of predictive coding
變換編碼在編碼時,原始數據要從初始空間或時間域經過變化后變為一個更適于壓縮的抽象域,目前最常用的是離散余弦變換。
統計編碼中常用的是霍夫曼編碼,原理是統計不同信息出現的頻率,對于出現次數多的信息,可以使用長度較短的編碼,而對次數少的信息,則用較長的編碼,這樣可以提高編碼效率,提高編碼的有效性。
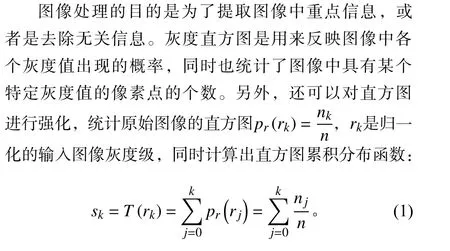
1.2.2 圖像處理及圖像分割
中值濾波是一種對圖形進行非線性處理的平滑方法,方法是先確定一個含有奇數點的窗口W,在圖像上移動這個窗口,把這個窗口W所包含的像素點的灰度值按一定順序排列,則該點的灰度值可以用位于中間的灰度值代替。
圖像銳化可以加重目標輪廓,使圖像變得更清晰,單方向的一階銳化是對某個特定方向上的邊緣信息進行增強,以水平方向的一階銳化為例,如圖3 所示。
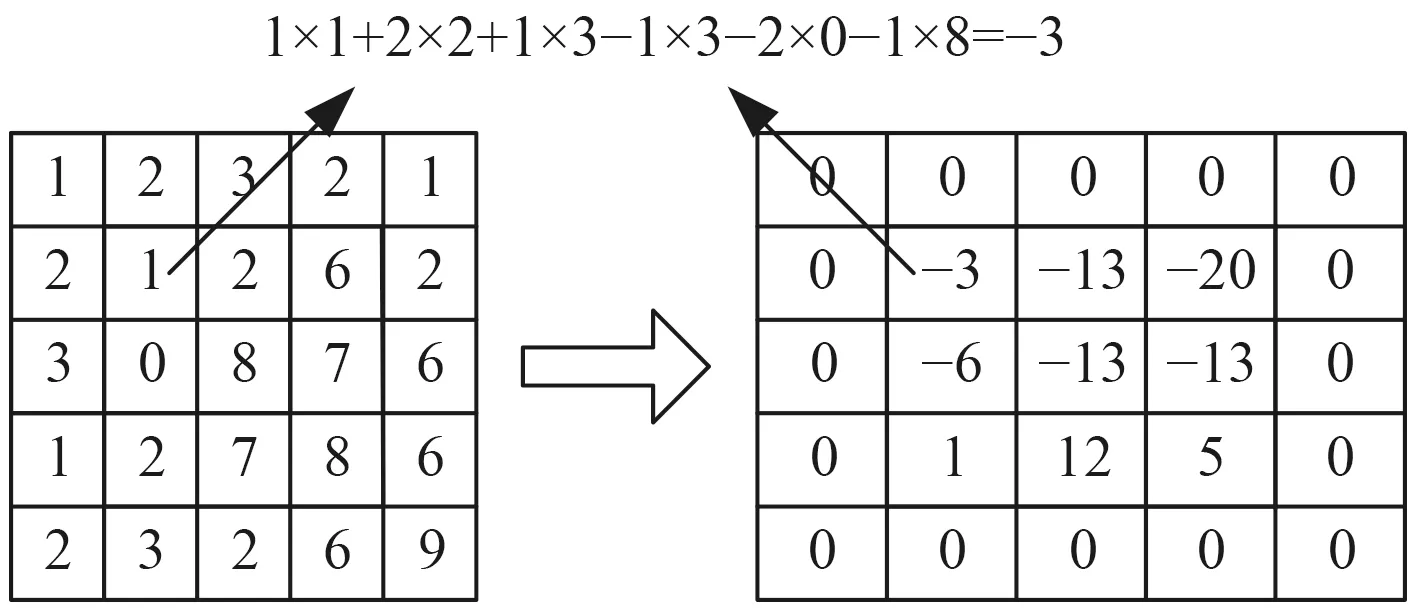
圖3 水平方向的一階銳化Fig.3 First-order sharpening in the horizontal direction
圖像分割是圖像識別和圖像理解的基礎,也是本文實現自動匹配的基礎,是基于目標或區域的特征進行的,把圖像分割成互不交疊的有意義區域,便于進一步分析,分開的區域一般是圖像中用戶感興趣的部分,流程如圖4 所示。

圖4 圖像分割流程Fig.4 Process of image segmentation
圖像分割是基于圖像亮度值的不連續性和相似性2 個特征,常用的方法灰度閾值分割法、自適應閾值分割法、邊緣檢測和區域生長法。
假設圖像為f(x,y),其灰度值范圍是[0,L],在0 和L之間選擇一個合適的灰度閾值T,灰度閾值分割法則表示為:
在有突發噪聲或背景灰度變化較大時可以用自適應閾值分割法,這個算法的缺點比較復雜,但其抗噪聲能力較強。在實際應用時,需要根據具體情況選擇合適的方法和閾值。
圖像的邊緣檢測是利用各種算子以及高通濾波處理方法對圖像邊緣進行增強。一階算子主要有Roberts算子、Prewitt 算子和Sobel 算子,相對來說,Sobel 算子的檢測效果最好。
區域生長的原理是把具有相似性質的像素點集合成一個區域,把其中某一個種子像素作為生長的起點,將種子像素附近范圍內與這個種子相似的像素合并到其所在的區域中,再將這個區域作為新的種子像素重復上述過程,直到沒有符合條件的像素出現。
1.2.3 時延抖動消除及數據恢復
信息在離開發送端時,是按照一定的間隔均勻傳輸的,但在通過網絡時,間隔會因不同原因而改變,從而產生時延抖動,在接收端間隔就會發生變化,如圖5(a)所示。主要原因是網絡路由狀態頻繁變化,網絡節點流量擁堵,信息在各個節點緩存時間過長。

圖5 時延抖動及消除Fig.5 Delay jitter and elimination
為了消除時延抖動,在接收端增加一個緩存,當緩存中儲存了一定數量的分組后,以固定速度按照順序讀出分組并進行還原。緩存其實是一個遵循先進先出規則的棧,圖5(b)中的T表示播放延時。
在上述的信息傳輸過程中,可能會發生分組丟失,數據的丟失直接影響到接收端的多媒體文件,雖然(Transmission Control Protocol,TCP)可以有效解決分組問題,但同時會帶來更大的時延抖動。因此,在多媒體數據傳輸過程中常使用前向糾錯或數據恢復等技術來重獲丟失的分組,或采用交織技術來減少丟失分組對多媒體質量的影響[4]。
2 艦船圖像定位自動匹配系統
2.1 定位系統組成和工作原理
本文基于多媒體網絡技術,構建了艦船圖像定位自動匹配系統,如圖6 所示。

圖6 基于多媒體網絡技術的艦船圖像定位系統Fig.6 Ship image positioning system based on multimedia network technology
攝像機實時獲取靜態、動態信息傳輸至多媒體網絡模塊,多媒體網絡模塊根據前文描述的原理對數據進行處理,用戶可以根據終端顯示器和控制系統接收到的處理后的多媒體數據進行查詢訪問,并可以根據需求對數據進行篩選,同時,有關部門也可以對航行中的艦船進行必要的實時監控[5-6]。
攝像機獲取的信息融合其他來源的信息,如衛星定位數據、AIS 數據等,通過自動匹配算法對船舶進行定位,定位的信息也會實時傳輸至終端顯示器和控制系統。整個系統需要對大量的多媒體數據進行實時處理、傳輸,以保證艦船的安全航行。
2.2 艦船運動方程
本文建立的運動方程的坐標系是以艦船重心為原點,并且固定在Eξη平面上,假設艦船的運動速度為US,船 角 速 度 為 ΩS, χ 為 潛 浮 角, γ 為 航 跡 角, α、β為水動角。艦船質量為m,受到的合力F在坐標系上的分量為Fξ、Fη,受到的轉矩在坐標系上的分量為TξG,轉動慣量為JZG,則有:

2.3 圖像匹配
采用尺度不變特征變換算法(Scale-invariant Feature Transform,SIFT)對圖像進行匹配,SIFT 具有良好的穩定性和不變形、區分性好、高速性以及可擴展性。SIFT 算法實現特征匹配可以分為提取關鍵點、定位關鍵點并確定特征方向、通過各關鍵點的特征向量三步來完成。
L(x,y,σ) 定義為原始圖像I(x,y)與一個可變尺度的二位高斯函數G(x,y,σ)的卷積運算為:
式中: (x,y) 為圖像的像素位置, σ為尺度空間因子。
2.4 實驗結果
基于多媒體網絡技術的艦船圖像定位自動匹配系統,對自動匹配的時間和成功率進行實驗研究,實驗結果如圖7 所示。

圖7 自動匹配時間和成功率實驗結果Fig.7 Automatically match time and success rate experiment results
可以看出,基于多媒體網絡技術的艦船圖像定位自動匹配系統能夠實現艦船圖像定位的自動匹配,匹配平均時間為5.23 ms,匹配的成功率可以達到90%。
3 結 語
基于多媒體網絡技術的艦船圖像定位自動匹配系統,能夠實時處理、傳輸大量的多媒體數據,通過SIFT 圖像匹配算法,可以實現艦船圖像定位的自動匹配,實驗證明,系統性能良好,為艦船的安全航行提供了可靠的保障。在后續研究中,可以對圖像匹配算法進行優化,進一步提高系統性能。
猜你喜歡
名師在線·上旬刊(2021年3期)2021-09-10 04:20:48
消費導刊(2018年10期)2018-08-20 02:56:28
中華手工(2017年2期)2017-06-06 23:00:31
中國教育技術裝備(2016年11期)2016-12-01 06:52:45
中小學電教(2016年3期)2016-03-01 03:40:51
河南電力(2016年5期)2016-02-06 02:11:40
語文知識(2015年9期)2015-02-28 22:01:42
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
