基于機器學習的艦船輪機設備多發故障信號監測
2023-09-16 09:16:20楊雙齊
艦船科學技術 2023年16期
楊雙齊
(武漢船舶職業技術學院 交通運輸工程學院,湖北 武漢 430050)
0 引 言
在智能背景下,艦船輪機設備狀態監測所需數據量劇增,艦船在不同工況下進行多發故障信號監測的難度加大,傳統故障監測方法已無法滿足新的需求[1]。
在艦船輪機設備故障診斷領域,國內外學者研究了各種機器學習算法的應用。余永華等[2]通過隨機森林算法,構建船用柴油機氣缸故障檢測模型,實現船舶發動機健康狀態的實時監控。彭道剛等[3]將采集到的故障信號進行變分模態分解,提取故障信號特征,通過貝葉斯算法優化超參數后,構建輕量型梯度提升機模型進行故障檢測。但它們在故障信號的檢測過程中依然存在運算量大、缺少故障數據、模型訓練復雜、檢測效率低,準確度低等問題。
為了減少采集故障信號對艦船輪機設備的傷害,可以引進異常數據檢測技術,只需要采集正常狀態的信號樣本,并與過去的故障樣本進行對比,即可檢測異常數據[4]。因此,本文提出基于機器學習的艦船輪機設備多發故障信號監測方法,結合EMD 經驗模態分解、孤立森林算法以及決策二叉樹支持向量機,實現了精確、高效、穩定的故障信號監測。
1 艦船輪機設備多發故障信號監測
1.1 采集艦船輪機設備振動信號
振動和聲音傳感器是艦船輪機設備信號采集的主要裝置,能夠采集各種輪機設備的振動信號和噪聲信號。在現實應用當中,為了增強信號采集的質量和效果,需要根據艦船所處的不同工況,選擇相應的傳感器類型,如表1 所示。艦船在錨泊和靠岸的時候可以使用聲音傳感器和振動傳感器同時進行信號采集,因為此時艦船受到的沖擊振動波很小,不會給傳感器帶來太大的干擾,而且選擇多路信號源可以提高故障信號監測的準確度。艦船在巡航和戰斗工況下,輪機設備會產生較大的振蕩,干擾振動傳感器的信號采集,使數據采集精度大幅度下降。因此這2 個階段適合聲音傳感器的信號采集,聲音傳感器在采集過程中無需進行實際接觸,所以可以避免大部分振蕩產生的影響,保證信號采集的精度。為了合理地設計傳感器的測量點位,提高信號采集的質量和精度,需要根據艦船不同輪機裝備的結構機理和屬性設置傳感器的放置位置,這樣可以使得到的數據信號具有更顯著的特點。
表1 艦船不同工況對應的傳感器類型Tab.1 Sensor types corresponding to different operating conditions of ships
1.2 振動信號特征提取
在進行特征提取之前,需要將采集到的振動噪聲信號進行小波變換降噪[5],濾除多余的噪聲。本文通過EMD 經驗模態分解法進行降噪后信號特征提取,該方法屬于平穩化處理,它可以將非平穩數據進行拆分,劃分為若干個IMF 函數。EMD 屬于時頻分析法,可以準確地分析時間變化的頻率和變化中的信號,同時定位時間和頻率,并通過時間和頻率的數據將信號的特性進行聯合表征,十分適用于分析艦船輪機設備振動噪聲這類非平穩信號。
采集的艦船輪機設備振動信號在進行降噪后,通過EMD 分解能夠獲取一定量的子信號,這些子信號的中心頻率都是降序排列,也就是IMF 分量。提取數據的特征參數,可以使獲取的IMF 分量特征分布更加顯著,從而賦予數據更多的物理意義,有利于故障信號的識別。設將艦船輪機設備振動信號X(t)進行EMD 經驗模態分解,其公式為:
式中:m為分解級數;imfi(t)為各級IMF 函數用,i=1,2, …,m;e(t)為剩余信號項。
為了獲取艦船輪機設備振動信號的解析信號,需要對IMF 分量實行Hilbert 變換,處理之后的解析信號可以表示為:
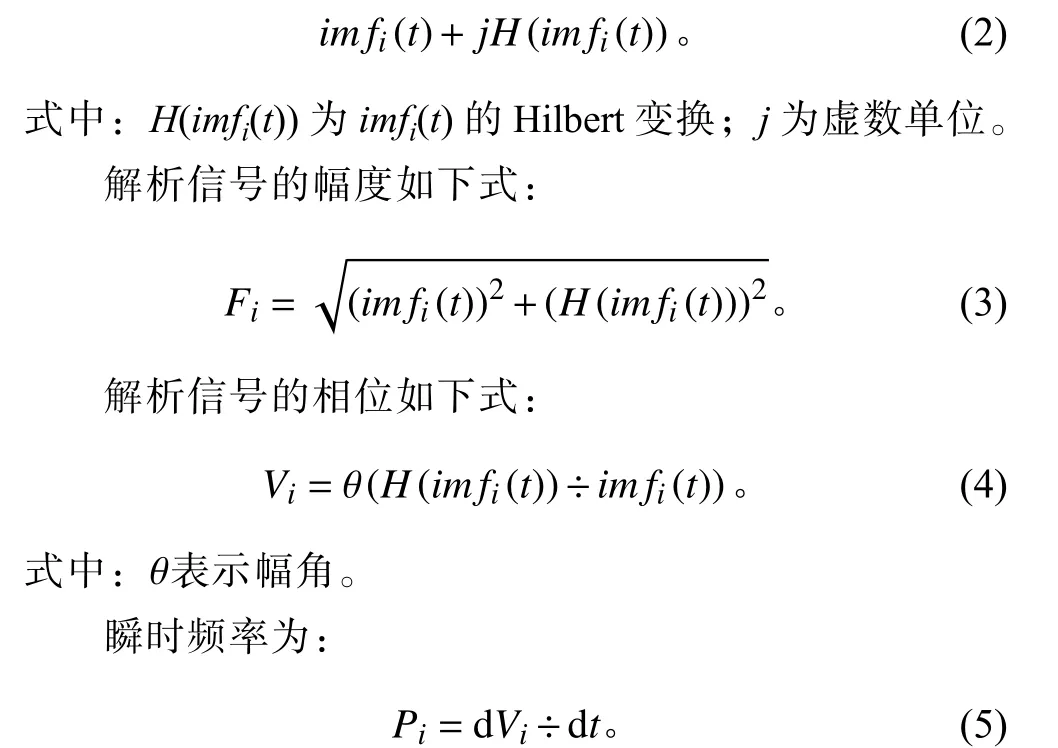
因為EMD 的計算過程屬于自適應濾波,因此各級對應的瞬時頻率不同,會根據信號的不同而變化。這些分量的頻率和幅度與數據的特征關聯,因此這些IMF 分量及其解析信號都可以作為振動信號分類的特征。
在提取艦船輪機設備振動信號的子信號特征時必須確定符合條件的特征指標,包括時域信息、頻域信息、幅域信息以及能量特征信息等,根據這些特征指標可以獲取對應的故障信號特征參數,從而反應艦船輪機設備的健康狀況。同時在選取特征方面,需要經過詳細的對比,最終篩選出最優特征,因為特征選擇對識別分類結果的影響很大,所以正確的特征選取可以提高故障信號識別分類的精度。
1.3 基于孤立森林算法的異常信號檢測
進行去噪和特征提取后,需要檢測其中的異常信號作為故障信號的分類和判斷依據,本文通過I forest孤立森林算法進行異常信號檢測。該算法屬于集成學習和劃分孤立的異常檢測算法,由若干二叉樹構成,因為異常數據的特征比正常數據要突出很多,所以通過二叉樹進行異常數據切分后,即可篩選出異常值,從而判定異常信號。孤立森林模型在使用二叉樹切分數據時,其特異程度取決于該數據點在二叉樹中延伸的距離,距離正常數據越遠,就說明該數據越異常,這里需要引入平均路徑長度和隔離樹2 個概念,整體計算過程如下:
1)在由艦船輪機設備振動信號特征構建的訓練集中選取若干子樣本組成二叉樹模型。
2)通過隔離樹傳遞測試樣本,進行艦船輪機設備振動信號特征異常分數的計算。
在進行模型訓練時,子空間孤立點檢測與I forest算法有著很大的關聯性。假設變量為d,在該變量分布的n個實例當中,選擇1 個艦船輪機設備振動信號特征數據樣本,構建一顆二叉樹。將一批樣本從整體數據當中分離出來,設置一個任意艦船輪機設備振動信號特征的初始點,取一個隨機參考值,分為左、右2 個路線,進行分類時,將小于參考值的樣本歸入左路,將大于參考值的樣本歸入右路,直至完成分類。
1.4 決策二叉樹支持向量機故障信號分類模型
艦船輪機設備故障信號種類多,不同故障會產生不同異常信號,因此通過決策二叉樹支持向量機的分類模型進行艦船輪機設備異常信號的分類。該方法結合了支持向量機二分類的特性,可以將復雜的多分類問題簡化為連續的二分類問題,詳細的分類過程如圖1所示。可以看出,所有異常信號的類別都在二叉樹的根節點體現出來,然后按照順序對測試數據集進行分類,直至到達最終的葉子節點,對應類別是測試數據集所屬的故障信號類別。

圖1 決策二叉樹支持向量機分類樹狀圖Fig.1 Decision binary tree support vector machine classification tree
1.5 艦船輪機設備多發故障信號監測流程
本文方法根據艦船不同的工況采集輪機設備的振動信號,通過小波變換進行降噪處理后,采用EMD 經驗模態分解法提取振動信號特征,使用孤立森林算法進行異常信號檢測,通過決策二叉樹支持向量機故障信號分類模型識別故障信號,實現艦船輪機設備多發故障信號監測,流程如圖2 所示。

圖2 多發故障信號監測流程Fig.2 Monitoring process for multiple fault signals
2 仿真實驗
2.1 數據集
在巡航工況下,采集艦船柴油發電機組運行中的振動信號,采樣頻率設置為45.8 kHz,只需要采集正常的振動信號即可,然后收集艦船過去采集的多發故障信號數據,以壓縮機故障、冷卻器故障和噴油嘴故障3 種信號為例,將正常信號與故障信號進行對比,如圖3 所示。可知,故障信號的幅值與正常信號的幅值相差并不明顯,只是略微有些區別,肉眼難以分辨,因此為了更好地分析信號特征還需要對采集到的信號進行降噪處理和特征提取。實驗將采集到的柴油發電機組振動信號進行分段提取,按照15 s 左右的長度截取,選用300 個正常工況下的振動信號樣本作為訓練集,再選擇200 個多發故障信號樣本,同300 個正常信號樣本共同組成500 個綜合信號樣本測試集。
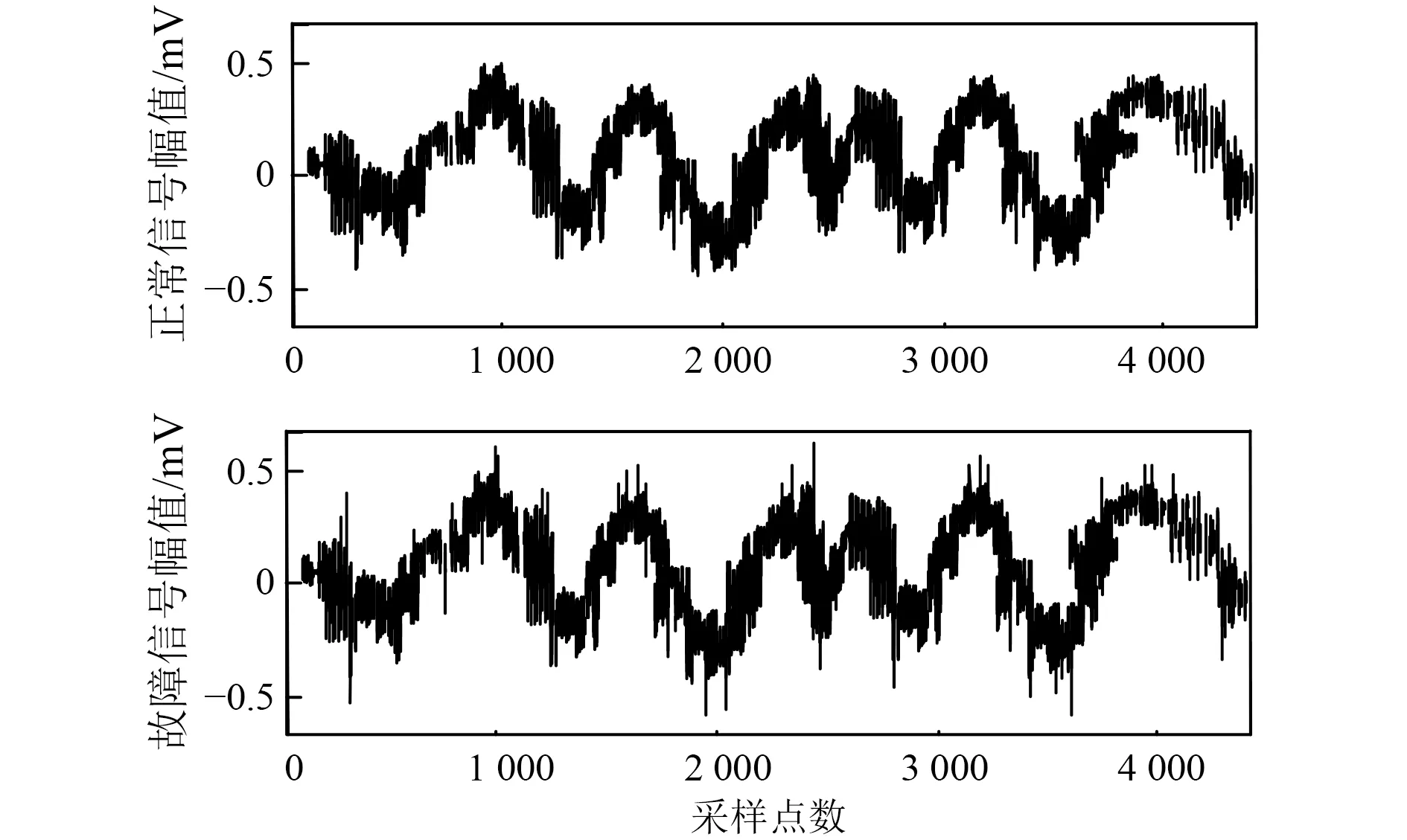
圖3 正常振動噪聲信號與故障信號對比Fig.3 Comparison of normal vibration noise signal and fault signal
2.2 可行性實驗
將采集到的船舶柴油機發電機組振動噪聲信號樣本進行小波降噪后,通過EMD 經驗模態分解,獲取一定量的子信號,分解效果如圖4 所示。可以看出,振動信號按照中心頻率呈降序排列,在經驗模態分解后形成了3 個IMF 分量,每個分量所含有的特征參數都不同,將這些分量特征進行提取,獲取正常信號特征參數。故障信號樣本按照相同的方法進行特征提取,獲取故障樣本特征參數。故障信號監測結果表2 所示。可以看出,故障信號類型檢測準確率在96%~100%,說明本文方法具有很好的故障信號監測效果,可以及時準確的發現艦船輪機設備的故障情況,有利于工作人員的維護和檢修,保證船舶的航行安全。
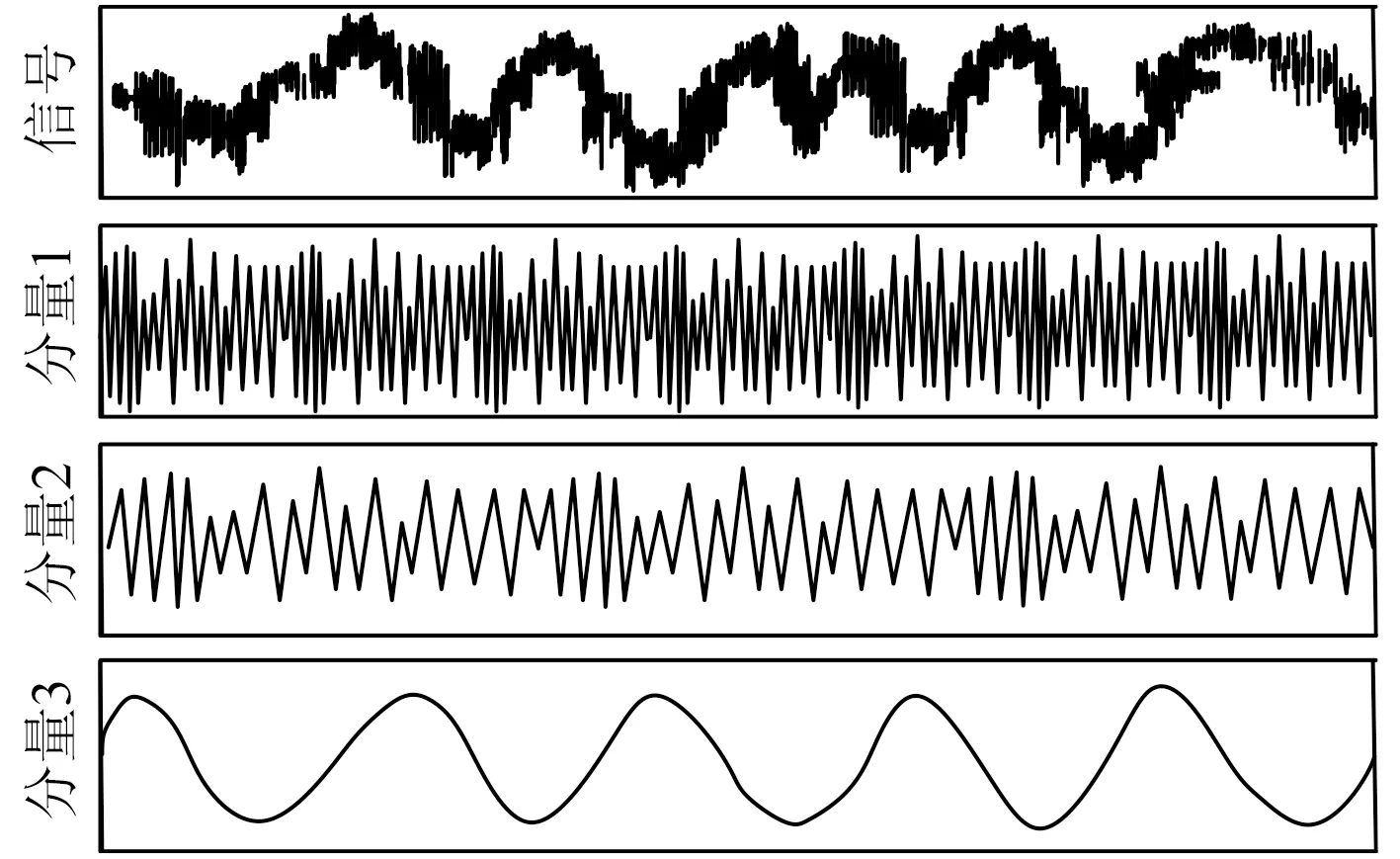
圖4 振動噪聲信號EMD 分解結果Fig.4 EMD decomposition results of vibration noise signal
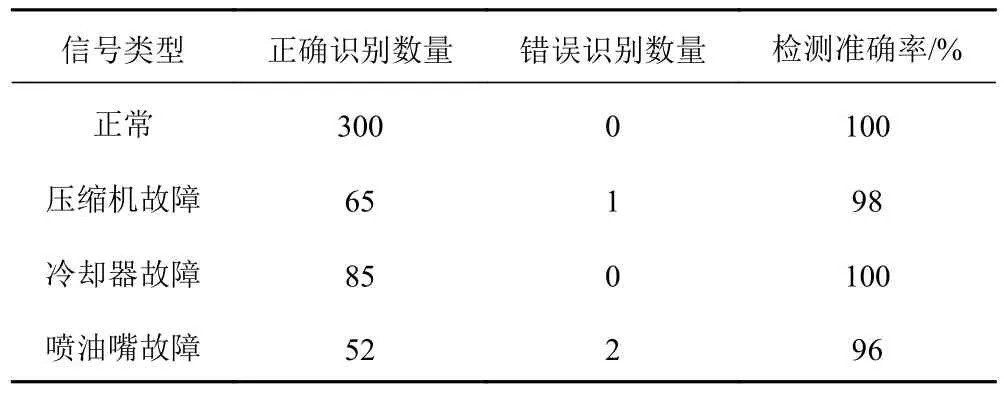
表2 故障信號監測結果Tab.2 Fault signal monitoring results
2.3 異常信號檢測效果對比
為了驗證本文方法使用的孤立森林算法在異常信號檢測方面的性能,實驗將本文方法與單分類支持向量機(OS)和魯棒性協方差估計(RC)2 種傳統異常檢測方法進行對比實驗,并通過故障信號檢測率(FDR)與故障信號虛報率(FAR)2 個指標進行分析,實驗結果如圖5 所示。可以看出,在3 種異常檢測算法當中,本文方法故障信號檢測率最高,故障信號虛報率最低,說明本文方法可快速檢測出艦船輪機設備產生的異常信號,效果優異,可以降低多發故障信號分類和識別難度,提高監測效率。

圖5 不同異常檢測算法效果對比Fig.5 Comparison of the effects of different anomaly detection algorithms
3 結 語
本文將采集的艦船輪機設備振動信號進行小波降噪后,通過EMD 分解提取信號特征,利用孤立森林檢測異常信號,使用決策二叉樹支持向量機模型識別故障信號類型,實現艦船輪機設備多發故障信號監測,實驗表明:
1)本文方法可以有效地提取艦船輪機設備振動信號特征,故障信號檢出率很高,可以及時準確地發現艦船輪機設備的故障情況。
2)本文方法可以快速準確地檢測出艦船輪機設備在運行過程中產生的異常信號,降低故障信號分類和識別的難度,提高故障信號監測效率。
3)本文方法在各種船舶工況下都可以準確的對多發故障信號進行監測,而且適應性和穩定性都很高,具有廣泛的實用價值。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
數學物理學報(2017年6期)2018-01-22 02:26:40
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
