一種雙錐陣穩健水下目標噪聲測量方法
2023-09-16 09:14:02王澤海鄢社鋒
艦船科學技術 2023年16期
曾 迪,張 震,王澤海,鄢社鋒
(1.中國科學院聲學研究所, 北京 100190;2.中國科學院大學, 北京 100049)
0 引 言
水下目標輻射噪聲的測量對水下移動平臺的發展至關重要,是發展低輻射噪聲水下移動平臺的重要參考條件。對水下目標輻射噪聲進行測量,需保證測量陣列在一定帶寬范圍內有恒定的主瓣寬度。且在淺海條件下進行測量時,還需考慮到淺海波導界面反射能量對測量結果的影響。隨著目標輻射噪聲的逐年降低,測量系統經歷了單陣元、垂直陣到體積陣的不斷演變[1-3]。美國等國家率先將雙錐陣等體積陣結構應用到噪聲測量中,雙錐陣具有較寬的水平向主瓣寬度和較窄的俯仰向主瓣寬度,有利于確保目標在波束主瓣內同時抑制界面反射的干擾,能較好滿足噪聲測量的需求[4]。
恒定束寬波束形成器是寬帶噪聲測量的基礎5]。現有方法利用嵌套陣、聚焦變換等方法實現恒定束寬,但大多應用于均勻線陣。應用于雙錐陣的嵌套陣方法對陣元數量要求高,布放難度大。本文通過建立雙錐陣噪聲測量的信號模型,利用雙錐陣作為測量陣列,同時引入一種低旁瓣穩健的恒定束寬波束形成方法,有效解決噪聲測量中的多徑干擾抑制和二維穩健恒定束寬波束形成問題。
1 雙錐陣穩健寬帶波束形成
1.1 雙錐陣噪聲測量信號模型
在淺海波導環境中,雙錐陣列第l個陣元接收到的頻率為f的復聲壓信號可以表示為:
式中:S(f) 為 復聲源幅度;G(rl,dl,zs,f)為頻域格林函數;n(f)為 噪聲;rl和dl分別為聲源與第l個陣元之間的距離和陣元深度;zs為聲源深度。根據射線理論,淺海波導的格林函數可表示為:
式中;Ai和 τi分別為第i個特征聲線的幅度和傳播時間; δ[·]為沖激函數。不同多途聲線的到達時間和到達角度不同,在噪聲測量中,需保留直達波而抑制其他多途信號。
考慮如圖1 所示的雙錐陣結構,假設接收陣列最上方陣元深度大于聲源深度且聲源位于y軸方向,則每個陣元與輻射聲源之間的相對距離及每個陣元的接收深度可表示為:
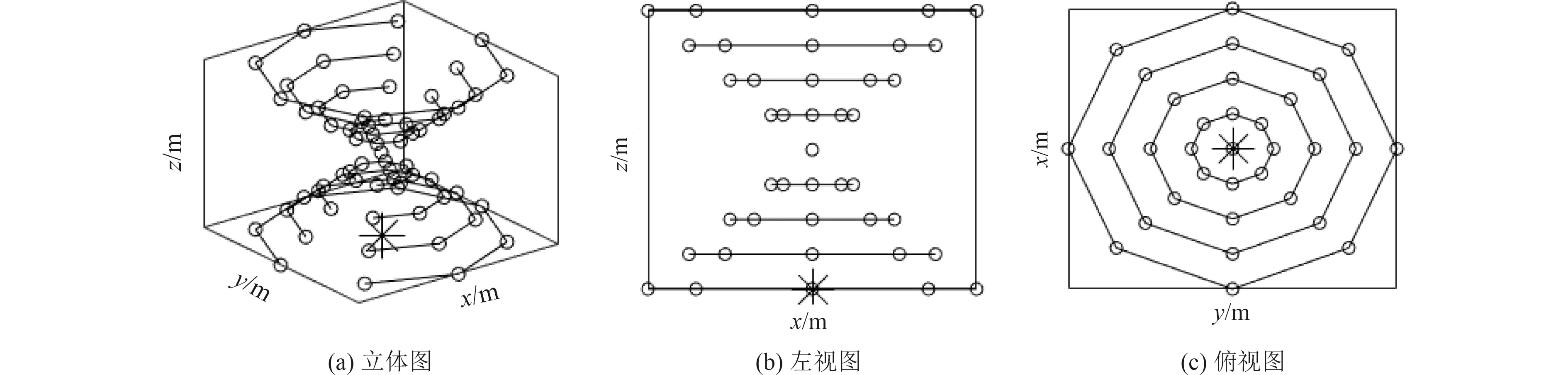
圖1 雙錐陣示意圖Fig.1 Views of the biconical array
式中: θl=arctan(-yl/xl) ;r0和d0分別為參考點的距離和深度; {xl,yl,zl}分別為各陣元相對參考點的坐標。
1.2 二維穩健恒定束寬波束形成
為了在俯仰方向有較低的旁瓣,在水平方向同時具有較寬的3 dB 主瓣寬度和較低的旁瓣,本文將低旁瓣穩健波束形成方法擴展到二維場景中,通過分別設計俯仰角和水平角的旁瓣約束達到旁瓣控制的目的。
根據圖1 所示的雙錐陣結構,假設俯仰角 θ為入射方向與z軸的夾角,方位角 ?為入射方向在xy平面投影后與y軸的夾角,則雙錐陣各陣元相對參考陣元的時延差可表示為:
式中:u=(sinθcos?,sinθsin?,cosθ)為來波方向的單位方向向量;el=(xl,yl,zl)為 第l個陣元的位置坐標;c為參考聲速。雙錐陣對每個方位的向量為:
對于二維低旁瓣穩健波束形成方法,通過觀察方向無失真響應、最大旁瓣值最小以及權重向量的范數約束,實現低旁瓣穩健波束形成,保證其他方位的多途干擾被有效抑制,降低其他方位噪聲源對目標噪聲測量的影響,從而提高測量準確度。由于水平角和俯仰角主瓣寬度和旁瓣抑制的需求存在差異,需要對2個方向的主瓣和旁瓣分別設計。因此,求解波束形成加權向量w的約束優化問題可表示為:
通過引入額外的權重參數 λ,實現俯仰角和水平角的旁瓣分別設計,以滿足噪聲測量的需求。
該二維低旁瓣穩健波束形成方法在設計頻率處有很好的旁瓣抑制效果,且水平角和俯仰角的主瓣寬度均能滿足要求,但在其他頻率處的效果不好。通過將設計頻率處的波束圖作為參考波束,利用聚焦變換實現恒定束寬。
聚焦變換利用一個聚焦矩陣T將不同頻率的信號數據聚焦到參考頻率f0上。本文采用旋轉信號子空間方法作為聚焦處理器,使得聚焦后的方向響應向量與參考頻率處的誤差最小:
結合兩式即可獲得恒定束寬的波束輸出。
2 仿真分析
2.1 測試條件
為實現真實淺海波導環境下對200~1000 Hz 范圍內的寬帶信號的測量,基于BELLHOP 模型,對雙錐陣恒定束寬方法進行測試。
環境參數如下:海水深度150 m,測量距離200 m,接收深度100 m,目標深度50 m。假設水下目標直徑12 m,長度100 m,測量距離200 m,則垂直方向-3 dB 主瓣寬度最小要求 a rcsin(6/200)×2=3°,水平方向 -3 dB 主瓣寬度最小要求 a rctan(50/200)×2=28°。垂直主瓣要求較窄,容易滿足;而水平主瓣要求較寬,需要進行波束設計。此外,淺海波導中聲線傳播情況如圖2 所示,存在較強的界面反射信號,直達波、海面反射波和一次海底反射波到達角度分別為76°、 5 2°、1 27°,需要對除直達波外的多途信號進行抑制。
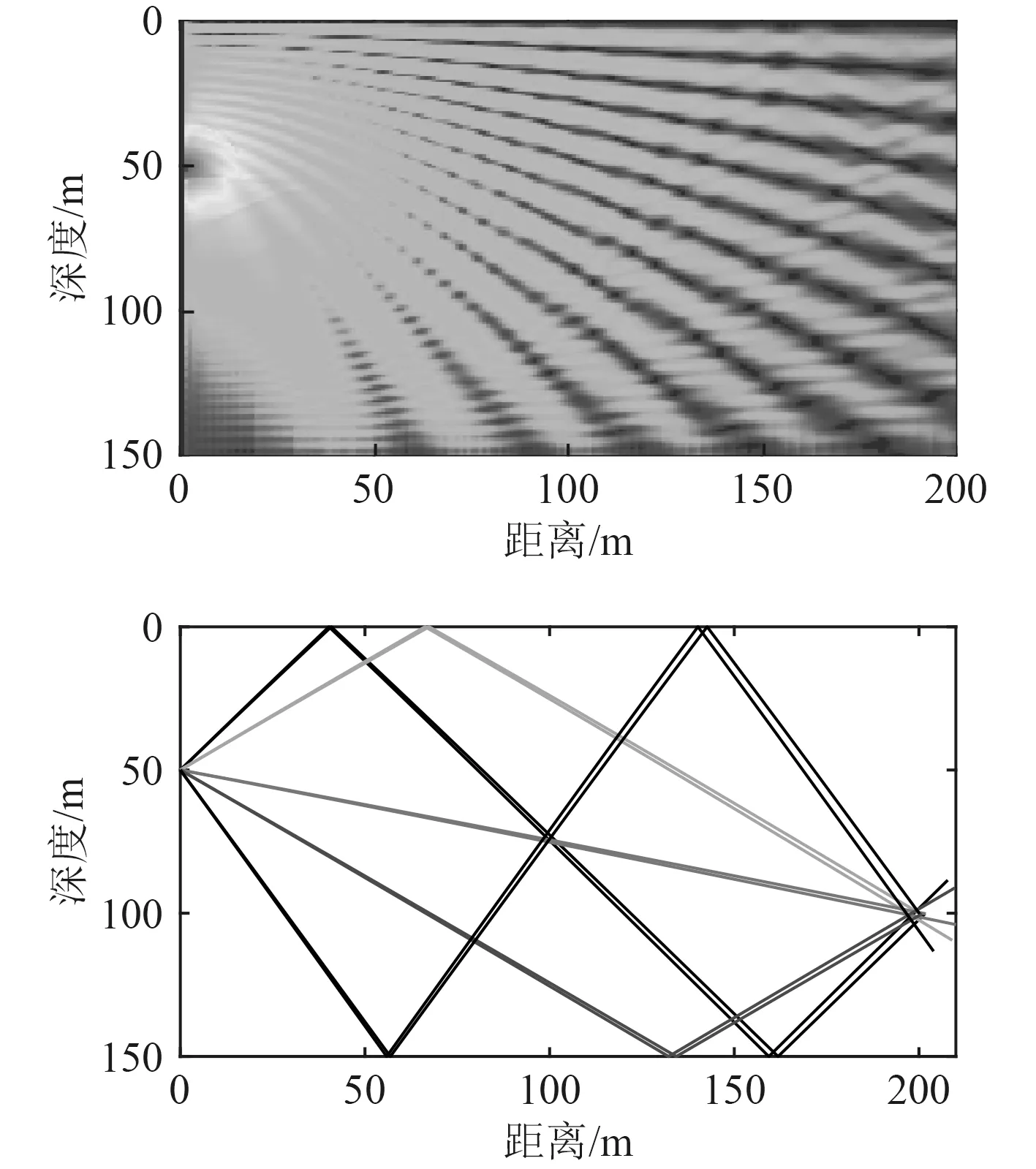
圖2 淺海波導下的傳播損失及特征聲線Fig.2 Transmission loss and sound rays in the shallow water waveguide
2.2 穩健恒定束寬波束形成方法
考慮如圖3 所示的雙錐陣結構,共9 層8 列,層高為0.5d,最大半徑為3d,d為最小頻率對應的半波長。假定波束形成器的主瓣指向直達波方向 7 6°,處理的頻率為200~1000 Hz。
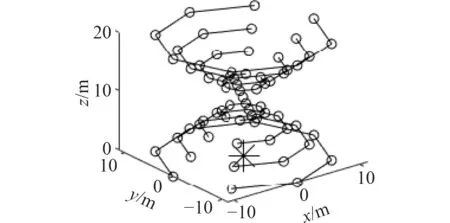
圖3 雙錐陣結構及各陣元坐標示意圖Fig.3 The structure and coordinates of each array element of the biconical array
圖4 為本文方法在俯仰方向和水平方向的寬帶波束圖,圖5 為各頻率處波束圖的疊加,不同頻率處的波束圖與參考頻率處基本一致,旁瓣低于 -40dB,能有效抑制多徑信號,且水平方向 -3dB 主瓣寬度為29°,滿足結構噪聲源測量需求。

圖4 雙錐陣二維低旁瓣穩健恒定束寬波束形成器波束圖Fig.4 Beam patterns of the robust constant beamwidth beamformer
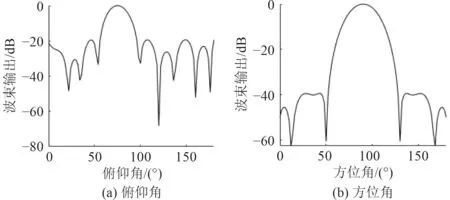
圖5 不同頻點上的恒定束寬波束疊加后的波束圖Fig.5 Beam pattern of constant beamwidth beamformer at different frequency points
2.3 水下目標輻射噪聲測量性能分析
仿真測量信號為聲源信號經BELLHOP 仿真信道傳輸后的陣列信號,信噪比為5 dB。聲源信號波形和頻譜及淺海波導信道的時頻特征如圖6 所示,可看到,在淺海波導中,受界面反射的影響,信道特征在時域上呈現明顯的多途特性,而在頻域則體現為周期震蕩,造成單水聽器接收信號失真。
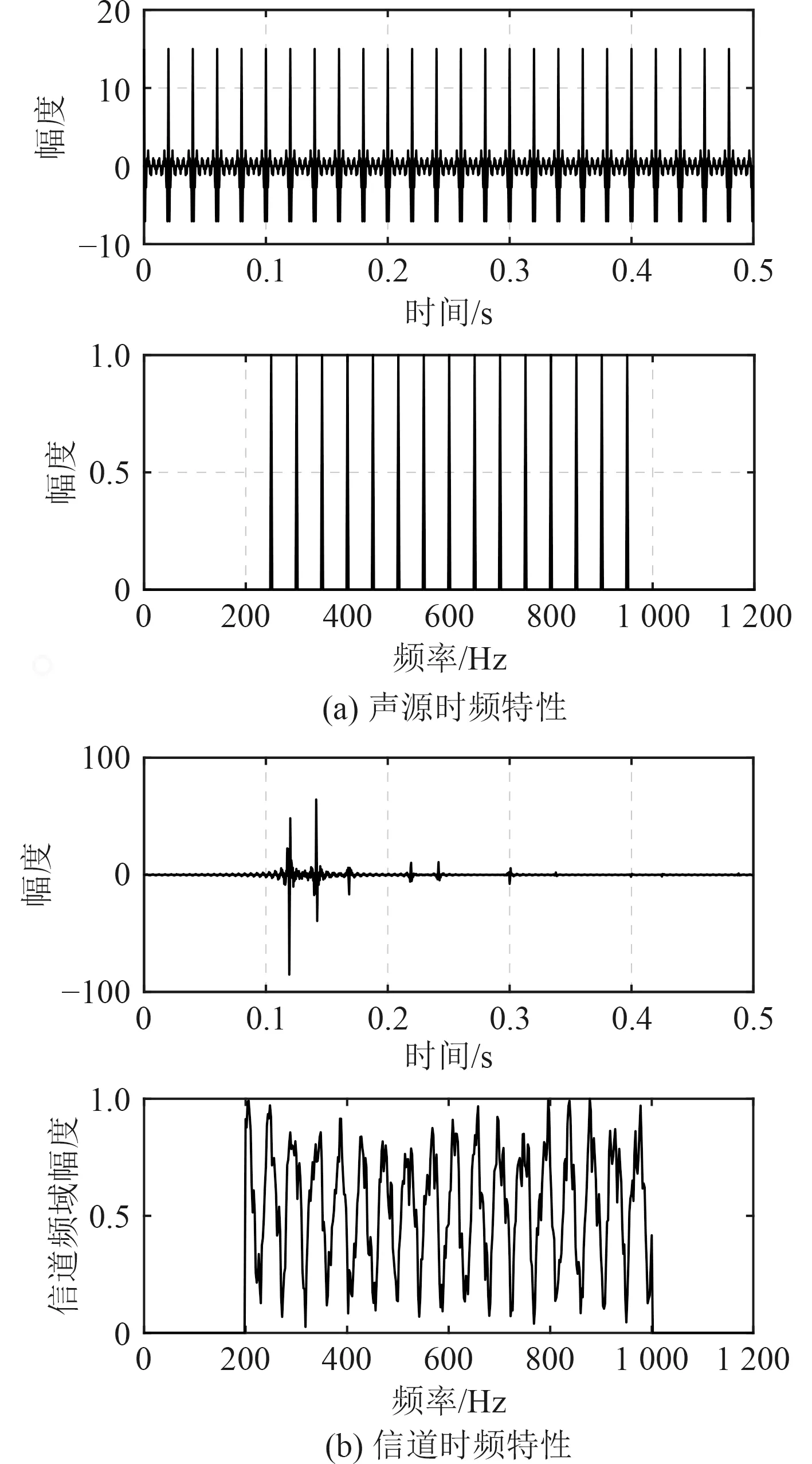
圖6 聲源信號時域波形和頻譜以及淺海波導信道的時頻特征Fig.6 Time-domain waveform and spectrum of sound source and time-frequency characteristics of shallow water waveguide
圖7 為淺海波導下,多頻信號的雙錐陣恒定束寬波束輸出結果。可看到,在淺海波導中,受界面反射的影響,單陣元信號的時頻波形都存在明顯的失真。常規波束形成方法的主瓣寬度隨處理頻率增加而減小,因此在波束輸出中體現出明顯的低通濾波器效應,且隨頻率變化有明顯起伏,表明其不能有效濾除界面反射信號的干擾。本文提出的測量方法能夠保證信號波形不失真,因此更準確地測量噪聲能量。單水聽器、常規波束形成以及本文方法的測量結果誤差分別為7.1 dB、4.1 dB、0.7 dB,表明該方法在噪聲測量中的可靠性。
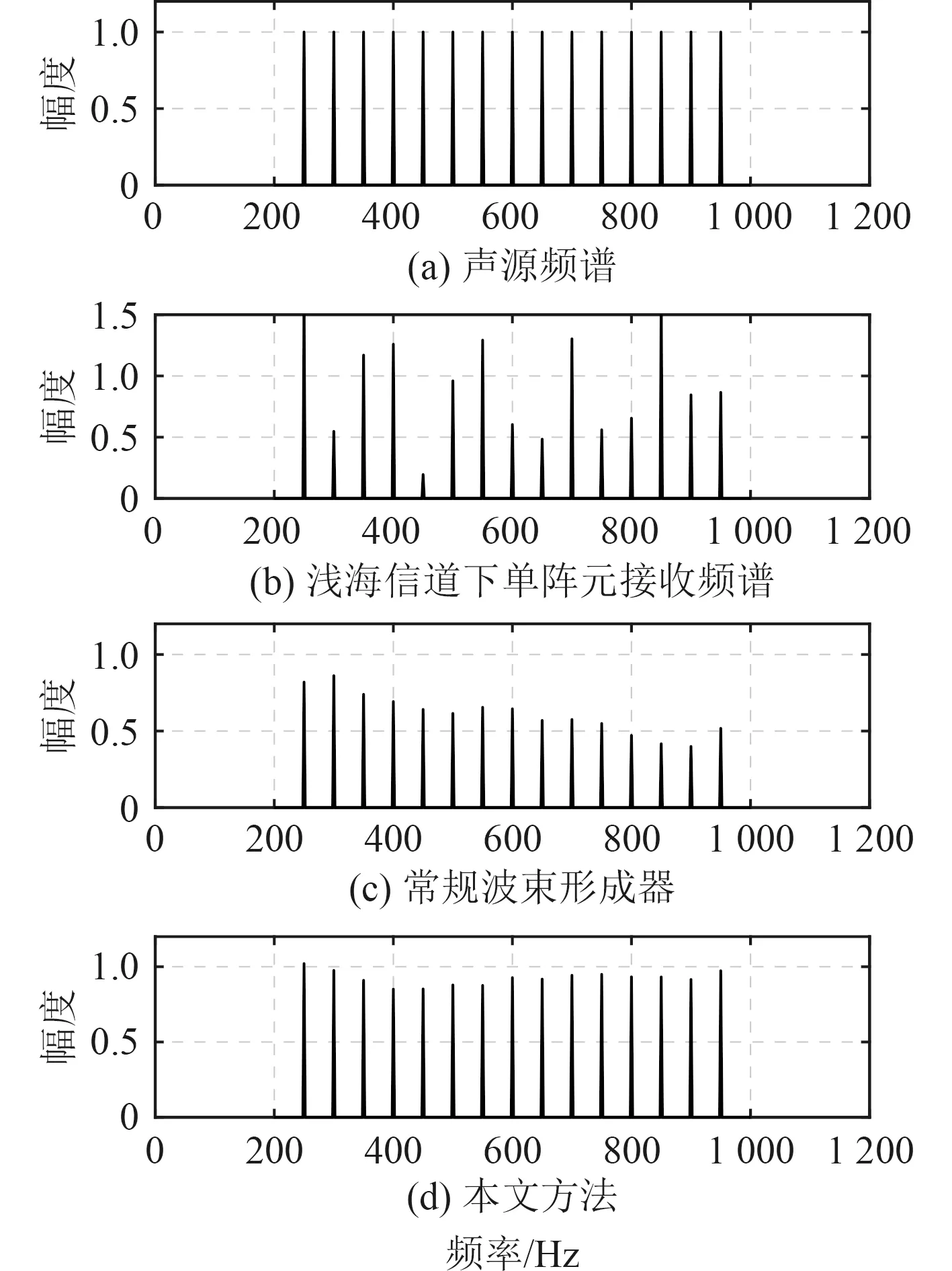
圖7 聲源頻譜、單水聽器接收信號頻譜、常規波束形成器及本文方法的波束輸出Fig.7 Source spectrum, receive signal of the single hydrophone,conventional beamformer and beam output of the proposed method
3 結 語
本文分析了淺海波導對噪聲測量的影響,建立了淺海波導環境中的雙錐陣信號模型。通過引入低旁瓣穩健的恒定束寬波束形成方法,在水平和垂直2 個方位均獲得低旁瓣的恒定束寬波束圖,有利于淺海波導噪聲測量中緩解界面反射信號對測量結果的干擾。仿真結果表明,本文提出的二維恒定束寬波束形成方法能有效應用到雙錐陣噪聲測量系統中,相比單陣元和利用常規波束形成的測量方法,測量準確性更高。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
