基于系統耦合的水下DOCK 綜合特性分析
2023-09-16 09:14:16刁家宇李衛民袁學慶付松松張凱璇
艦船科學技術 2023年16期
刁家宇,李衛民,袁學慶,付松松,張凱璇
(1.遼寧工業大學 機械工程與自動化學院, 遼寧 錦州121000;2.中國科學院沈陽自動化研究所 機器人學國家重點實驗室, 遼寧 沈陽110016;3.中國科學院 機器人與智能制造創新研究院, 遼寧 沈陽110169)
0 引 言
自主式水下機器人(Autonomous Underwater Vehicle, AUV)是一種綜合了多種船舶、機械、推進、計算機等先進技術的自主式無人潛器。近年來,因全球對海洋探測要求的不斷提高,AUV 被應用于水文觀測、海洋監測、地質和生物調查等領域[1]。但是由于AUV 在水下作業中需要消耗大量能源且自身所能攜帶的能源有限,AUV 每次能源耗盡前必須返回水面工作臺進行能源補充,這極大限制了AUV 的海洋環境探測能力,并消耗了大量人力、物力[2]。經過近幾年相關領域的探索和研究,發現可以通過在水下建立對接DOCK 的方法解決此類問題[3-5]。
現階段,國內外學者對AUV 對接進行了一系列相關研究,趙國良等[6]研究了喇叭口式對接系統喇叭口剖面半徑與初始中心線偏移量對接駁過程的影響;Tao 等[7]通過多體動力學分析軟件對剛度系數、阻尼系數、初始速度、偏移角等因素單獨進行研究,得到了以上因素對AUV 接駁過程中碰撞力的影響;Meng等[8]通過流體動力學仿真軟件,研究了與捕捉桿式對接系統在捕獲時與碰撞力有關的影響因素;Cheng等[9]研究了雙體之間水動力的相互作用,得到了2 個物體在不同間隙比、不同雷諾數、不同迎角、不同表面形狀下的相互作用力。但是目前還沒有對DOCK 對接時進行水下綜合特性分析的研究,尤其是沒有通過雙向流固耦合分析其特性研究,因此對DOCK 對接時進行整體機構的精確特性分析具有一定意義。
AUV 和DOCK 在水下的對接過程是一個極其復雜的過程,這個過程既要考慮DOCK 的變形情況對水流的擾流動影響,又要考慮水流流動對發生形變后DOCK 的沖擊影響,因此可以采用雙向流固耦合的方法模擬外界條件,雙向流固耦合可以通過系統動網格重構展示數字模型的變形情況。同時為了得到準確的瞬態結構場數據,采用接觸碰撞法利用多體動力學軟件對AUV 與DOCK 的對接過程進行虛擬仿真,確定碰撞載荷的大小。本研究可為AUV 水下對接操作提供技術支持,對水下對接的相關研究具有一定的參考價值。
1 相關設計模型
1.1 DOCK 的數字模型
常見的對接裝置可以分為捕捉桿式對接系統、飛機坐落式對接系統和錐形罩式對接系統,現階段研究最廣泛的對接裝置依然是基于喇叭口狀的錐形導向罩DOCK 對接系統[10]。該類裝置通常使用漸縮型的入口裝置進行導向,使AUV 進入預定的軌道完成對接。典型的錐形罩式對接系統有美國研發的“REMUS AUV”水下對接系統、哈爾濱工程大學研制的“海靈號”水下對接裝置以及中國科學院沈陽自動化研究所、浙江大學、日本東京大學等相關機構研究的項目[11]。根據對以上錐形罩式對接裝置的研究,本文設計并改進了一種新型錐形罩式DOCK,該DOCK 可以通過錐形罩對AUV 進行導向,通過對接爪與AUV 進行對接,通過齒輪齒條對中機構對AUV 進行固定,保證AUV 的各個自由度都可以被限制,其新型DOCK 的數組模型如圖1 所示。碰撞參數,其碰撞恢復系數為:


圖1 新型DOCK 的數字模型Fig.1 A digital model of the new DOCK
1.3 流固耦合物理模型
流固耦合指流體與固體之間的相互作用。流固耦合的基本方程為:
1.2 AUV 與DOCK 接觸碰撞的物理模型
通常來講,接觸可以分為法向接觸和切向接觸2 種。法向接觸是面對面的直接接觸,其中又分為例如沖壓的持續接觸和例如碰撞的瞬時接觸,而切向接觸通常伴隨著摩擦接觸。AUV 與DOCK 的碰撞屬于一種既包含瞬時碰撞的法向接觸,又包含庫倫摩擦的切向接觸的綜合接觸。對于這種復雜接觸,可以采用等效彈簧阻尼法分析AUV 與DOCK 發生對接碰撞時的

雖然普通流固耦合可以滿足大部分耦合要求,但是有些對于精度要求較高的耦合系統中,即需要考慮流體對物體產生的影響,又要考慮物體對流體產生的影響,這種考慮綜合影響的耦合稱作“雙向”耦合,雙向耦合將計算域分為流體域和瞬態結構域,并通過系統耦合連續地傳遞作用力,其中流固耦合界面滿足的動力條件為:

2 虛擬仿真
2.1 基于ADAMS 的接觸碰撞仿真
ADAMS 是MSC 公司開發的多體動力學的虛擬樣機仿真軟件,是目前最權威的機械系統動力學仿真軟件,被廣泛應用于虛擬樣機測試中,因此選擇ADAMS軟件進行模擬。
2.1.1 參數選取
可以采用IMPACT 沖擊函數模型對AUV 的對接進行研究,IMPACT 定義碰撞的廣義函數為[13]:
式中:Fn為法向接觸力;k為接觸剛度; δ為穿透深度;C為力指數;v為相對速度。根據此模型可以發現,利用IMPACT 定義碰撞需要知道接觸力、接觸剛度、穿透深度和力指數4 個參數。
接觸剛度的Hertz 理論計算[14]公式為:

力指數和材料的非線性程度有關,通常用來計算瞬時法向力中材料剛度項貢獻值,根據ADAMS 軟件的官方幫助文件可知,該數的范圍在1~3 內。對于金屬材料,力指數通常可以取1.3~1.5,而對于橡膠材料,力指數通常可以取到2~3。
滲透量為全阻尼時的穿透值,穿越值為0 時,阻尼系數為0。在ADAMS 軟件中,可以運用三次STEP函數求解阻尼系數。滲透量與剛度成反相關,與力指數成正相關,該值仍然選自幫助文檔。
另外還需注意的是,接觸碰撞還要考慮切向接觸,切向接觸中即需要考慮靜摩擦系數 μs和動摩擦系數 μk,這2 個參數與材料的光滑程度有關。
根據本節的研究及其已知條件,可以確定仿真的所有參數,如表1 所示。

表1 仿真確定的參數Tab.1 Parameters determined by simulation
2.1.2 對接仿真
將DOCK 進行簡化,去除不必要的對接爪、齒輪齒條對中機構等部件,使之僅保留DOCK 的骨架。通過對AUV 施加初速度、牽引力約束,對DOCK 施加固定約束,對AUV 和DOCK 施加碰撞約束,并測量碰撞力。在ADAMS 中設置完約束后如圖2 所示。

圖2 對接系統的虛擬樣機模型Fig.2 Virtual prototype model of docking system
為了使仿真效果更接近真實情況,在初始狀態中,將AUV 與DOCK 錯開一定距離,使AUV 接觸DOCK 后,由錐形導向罩進行引導對接。運行虛擬樣機,并通過ADAMS 自帶的測量工具進行測量,得到的數據如圖3 所示,可以看出AUV 存在多次碰撞,最終AUV 順利抵達DOCK 末端完成對接,其中第一次碰撞是AUV 與DOCK 的錐形導向罩的對接,接下來是AUV 與DOCK 中間肋板的碰撞,最后一次是A U V 與D O C K 末端的對接,本文研究的對象為AUV 與DOCK 完成對接時的最后一次碰撞,故選擇此參數作為瞬態結構場的外力約束。
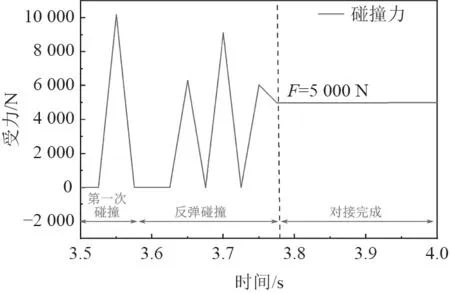
圖3 虛擬樣機測得的碰撞數據Fig.3 Collision data measured by virtual prototype
2.2 基于系統耦合動網格的雙向流固耦合仿真
本節將得出的瞬態結構場條件設置在有限元軟件中,并通過系統耦合耦合到流場中,通過系統耦合的物理場,可以同時處理AUV 的碰撞力對水流的擾流動影響和水流流動對碰撞力的影響。本節仿真軟件選擇Ansys Workbench,相對其他CAE 有限元分析軟件,其特點功能全面,可通過工作臺將模塊進行耦合分析。
2.2.1 瞬態結構場的設置
使用四面體網格劃分DOCK 框架,同時將結構復雜的面上進行加密,最終劃分為8187 個單元,網格劃分情況如圖4 所示。通過網格質量檢測可以看到網格平均質量大于0.7,因此網格劃分質量較好。

圖4 DOCK 結構場的網格劃分Fig.4 Meshing of DOCK structure field
根據DOCK 實際情況,設置各處約束。將DOCK末端,設置一個接觸面為圓的形沖擊力,代表AUV 的最后一次碰撞力,輸入測試得到的結果;將DOCK 框架的底部設置為固定約束;將DOCK 整個框架設置為流固交涉面,表示整體結構同時受到流場和結構場的影響,并將整體變形、等效應力和等效應變設為待求解。最終,DOCK 的狀態如圖5 所示。

圖5 DOCK 結構場的約束情況Fig.5 DOCK structure field constraints
2.2.2 瞬態流場的設置
由于需要考慮外流場的作用,在流場分析中需要給DOCK 添加外流域。在流場建模中,給DOCK 外側添加一個六面體作為外流場。同時,劃分網格時,除瞬態結構場的操作外,還需劃分外流域網格,并在DOCK 表面添加棱柱層網格,最終得到65036 個網格,網格劃分情況如圖6 所示。平均網格質量大約為0.85,因此整體網格劃分質量較好,將各個面命名后完成預處理。

圖6 DOCK 流體場的網格劃分Fig.6 Meshing of DOCK fluid field field
選擇多核并行處理器,進行3D 模型流體求解。選擇類應為基于壓力,時間為瞬態,選擇標準k-ε粘性模型,將外流域材料設置為流體水,水的流速為3 m/s,求解方法為默認,各項殘差均為0.001,并將整個DOCK 框架設置為流固交涉面,進行初始化。
為了有更好的觀看效果,分別將xz平面和yz平面顯示出來,并保留DOCK 框架,隱藏外流域模型,DOCK的最終狀態如圖7 所示。

圖7 DOCK 流體場的約束情況Fig.7 DOCK fluid field field constraints
2.2.3 耦合仿真
建立系統耦合模塊,設置數據傳輸信息,將流場的表面應力添加到瞬態結構場的表面應力;將瞬態結構場的位移形變添加到流場的位移形變中,進行耦合求解。由求解收斂圖可以看出耦合效果較好,每個時間步的耦合系數都已收斂,經過求解后,可以得到DOCK 的等效變形圖、等效應力圖、等效應變圖和流場壓力圖。其中,Workbench 界面的雙向流固耦合分析流程圖,如圖8 所示。
圖9 為DOCK 承受的等效變形圖、等效應力圖、等效應變圖。由圖9(a)可知,整個DOCK 中,變形最大處為上支撐臺,數值為7.0069E-5 m;變形最小處為DOCK 底面,數值為0 m,其中整體趨勢為由下到上變形依次增大,這是由于DOCK 的底面為固定面導致的。由圖9(b)可知,整個DOCK中,變形最大處為DOCK尾部與下平面的連接處,數值為8.1036E-6 m/m;變形最小處為DOCK 底面,數值為1.997E-9 m/m,其中整體趨勢為框架連接處較大,這是由各個框架的疲勞壽命系數決定的。由圖9(c)可知,整個DOCK 中,變形最大處為DOCK 尾部與下平面的連接處,數值為1.4688E-6 Pa;變形最小處為DOCK 底面,數值為98.5 Pa,其中整體趨勢也為框架連接處較大,這也是由各個框架的疲勞壽命系數決定的。因此應加固DOCK 框架連接處以及上方結構。

圖9 DOCK 應力、應變、變形結果云圖Fig.9 DOCK stress, strain, deformation results cloud diagram
圖10 為DOCK 的內外流場壓力云圖,其中迎流面壓力最大,最大值為4.88E5 Pa,剩余的迎流面壓力依次逐漸減小,周圍壓力比較穩定,基本保持在2.44E5 Pa左右。開始時頭部壓力較大,之后隨著流場穩定壓力逐漸低并穩定。因此,應對每個迎流面進行加固,尤其是第一個面。

圖10 DOCK 流體壓力云圖Fig.10 DOCK fluid pressure cloud diagram
3 結 語
本文以設計的一款新型錐形罩式DOCK 為研究對象,對DOCK 對接結果特性進行相對精確的分析。相關結論如下:
1)通過系統虛擬樣機仿真得到了AUV 對接過程的瞬態運動及其受力情況,并施加到有限元仿真的結構場中進行流固耦合分析。僅通過基本數據就實現了對對接過程DOCK 狀態的綜合分析。
2)通過對雙向流固耦合的變形云圖分析可以發現DOCK 的變形趨勢為由上到下逐漸減少,且上方的變形遠遠大于下方,因此DOCK 上方需要添加更強魯棒性的材料,以保證DOCK 的穩定性,其材料可以根具變形云圖中的具體數值進行合理的搭配。
3)通過對雙向流固耦合的應變和應力云圖分析可以發現支撐桿和一些垂直板處應力應變較大,且應力應變最大處和最小處分別位于DOCK 的框架及平面的連接處和DOCK 底座處,因此要著重對此連接處進行加固,其加固情況可以根具應應力變云圖中的具體數值進行相應的修正。
4)通過對雙向流固耦合的內外流場云圖分析可以發現DOCK 的迎流面附近的外流場和表面壓強較大,數值大約比系統平均壓強高一倍,比后方的迎流面壓強高1/3 倍,同時迎流面接觸面積較大的地方壓強也有明顯的提升,針對受到水壓較大的地方可以根據云圖結果的具體數值進行適當的調節。
5)在實際工程中,還可以根據實際需求在Workbench 中添加其他需求解結果,本文所述的方法均可實現求解。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2020年1期)2020-09-21 09:24:52
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
家庭影院技術(2017年9期)2017-09-26 03:41:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
