考慮落角約束和氣動不確定性的固定時間制導控制一體化設計方法
2023-09-15 01:21:00胡誠偉汪學平
彈箭與制導學報 2023年4期
胡誠偉,韋 悠,汪學平
(西安現代控制技術研究所,陜西 西安 710065)
0 引言
現代戰爭中更加能動的戰場戰術和精度要求的提高使得經典控制系統設計方法在很多應用中不能滿足要求。通常來說,制導系統和控制系統可以通過解耦分為兩個獨立的子系統,從而形成典型的兩回路控制方案[1-2]。基于這種設計思路,已經有文獻提出了包括比例導引[3-4]、魯棒制導律[5-6]和滑模制導律[7-8]等多種有效的制導控制方法。上述方法雖然已成功應用于目標攔截,但采用分離設計的制導和控制系統,其攔截高機動目標時性能可能會嚴重下降。
為了提高導彈的殺傷效能,制導控制一體化設計已成為戰術導彈制導與控制系統設計的新趨勢。一般來說,現有制導控制一體化設計方法可以分為基于自動駕駛補償的制導律設計方法和完全制導控制一體化設計方法[9]。對于第一類方案,通常將自動駕駛儀假設為一階或二階環節,然后在制導律設計中加入補償來處理自動駕駛儀帶來的響應滯后[10-11]。盡管這些算法能夠實現目標攔截,但其性能嚴重依賴于對自動駕駛儀近似估計的準確性。然而,對于大空域機動的導彈,其空氣動力學特性本身就存在著較大的不確定性,這使得自動駕駛儀很難被精確地近似為簡單的一階或二階環節。而完全制導控制一體化設計方法能夠避免對自動駕駛儀的近似估計,直接針對完全非線性導彈動力學模型設計制導控制方法,其中典型的方法包括反饋線性化方法[12]、狀態依賴Riccati方法[13]、θ-D方法[14]、模型預測靜態規劃方法[15]和有限時域最優控制[16]。然而,完全制導控制一體化設計方法計算較為復雜,且大都無法保證閉環系統的魯棒性[17]。
由于導彈制導和控制系統具有嚴格的反饋形式[18],因此反步設計思想在制導控制一體化設計中也被廣泛應用。然而,在反步設計過程中對虛擬控制量進行重復微分會導致“微分膨脹”問題[19]。為了解決這個問題,動態面控制技術被用于制導控制一體化設計中。文獻[20]針對慢機動目標,基于自適應動態面控制給出了一種制導控制一體化設計方法。文獻[21]通過引入了模糊系統來估計和補償不確定性,提出了一種基于自適應模糊動態面的制導控制方法。文獻[22]提出了一種二階滑模微分器來估計虛擬控制量的導數,實現了考慮氣動不確定性和落角約束的制導控制一體化設計。然而,上述基于反步控制和動態面思想給出的方法只能實現半全局漸近最終有界穩定,而非有限時間穩定[23]。因此研究有限時間收斂的制導控制一體化設計方法具有重要的實際意義。作為有限時間穩定性理論的擴展,固定時間穩定性引起收斂時間上界不依賴于初始條件而被廣泛的關注。然而,固定時間制導方法僅適用于二階系統,無法直接應用到導彈的制導控制一體化設計問題。
基于上述分析,文中研究考慮落角約束和氣動不確定性的固定時間制導控制一體化設計問題。基于反步法提出了固定時間滑模制導控制一體化設計方法,并借助于固定時間微分器解決了傳統反步設計中存在的“微分膨脹”問題,最終實現了閉環系統的半全局固定時間一致最終有界穩定。主要價值在于:1)提出了一種固定時間制導控制一體化設計方法,并實現了不受初始條件影響的半全局固定時間一致最終有界穩定;2)在制導控制一體化設計中考慮了目標機動不確定性和導彈氣動不確定性,使得所提出方法更加適用于實際應用。
1 問題描述和預備知識
考慮鉛垂面內落角約束的制導控制一體化設計問題。圖1為導彈與目標相對運動示意圖,其中VM和VT為導彈和目標速度且滿足VT/VM>1;aM和aT為導彈和目標垂直于速度方向的加速度;γM和γT為導彈和目標彈道傾角;r和λ分別表示導彈與目標之間的相對距離和視線角。為簡單起見,導彈和目標被視為勻速運動的點質量。
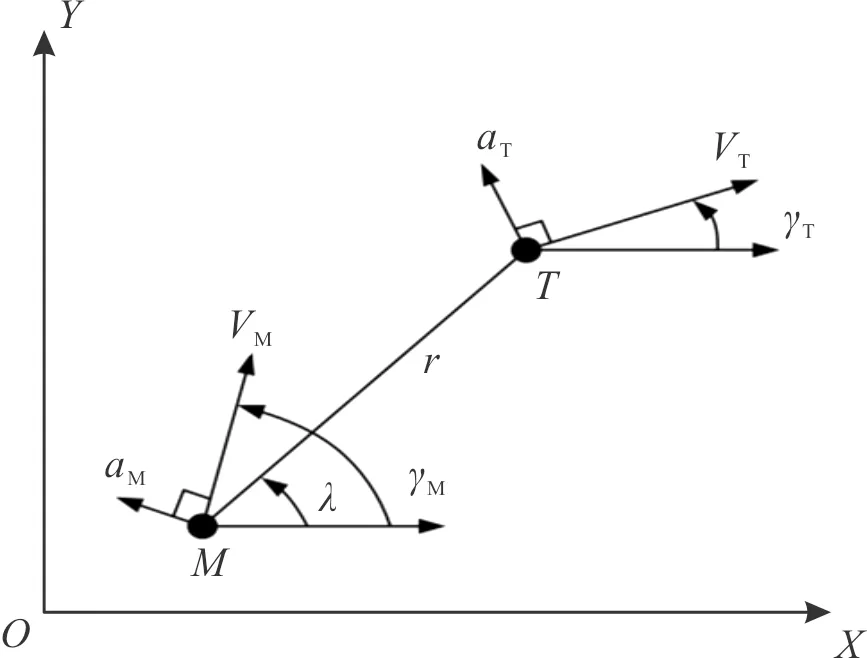
圖1 導彈與目標相對運動Fig.1 Relative motion between missile and target
導彈和目標間相對運動可以表示為:
(1)
(2)
(3)
(4)
(5)
文中所研究的帶落角約束的制導控制一體化設計問題可以表述為設計控制輸入δz使得導彈以期望視線角λd與目標交會。
為了給出主要結果,考慮以下系統:
(6)

(7)
2 集成制導與控制律設計及穩定性分析
2.1 制導控制一體化設計
為了給出制導控制一體化設計方法,需借助于以下假設:
基于上述假設,下面將根據典型的反步設計過程逐步給出制導控制方法。
步驟1:令s1=λ-λd,s1對時間求導可得:
(8)
其中,Δ1=-aT/VT被視為外部干擾,其上界d1>0,即|Δ1|≤d1。
為式(8)選擇以下虛擬控制律:
(9)
其中:k1,c1,p,q是正實數;ρ1≥d1。
(10)
步驟2:令s2=Vλ-Vλ,d,s2對時間求導得出:
(11)

(12)
其中:k2和c2為正數;ρ2≥d2。引入新狀態變量αd其動力學由式(13)給出:
(13)
其中τ2>0為時間常數。
步驟3:令s3=α-αd,并對s3求導得出:
(14)

(15)
其中k3和c3為正數,且ρ3≤d3。引入新狀態變量ωd,其動力學滿足:
(16)
其中τ3>0為時間常數。
步驟4:令s4=ωz-ωz,d,并對s4求導得:
(17)

對于子系統式(16),考慮控制律:
(18)
其中:k4和c4是正數;ρ4≥d4。
2.2 穩定性分析
給出穩定性分析,以證明提出方法具有半全局固定時間穩定性。首先定義以下誤差變量:
(19)
對于使用文中所提控制律的閉環系統,存在足夠大的正常數ki,ci(i=1,2,3,4)、足夠小的正常數τi(i=1,2,3)和正奇數p,q,滿足p>q且(p+q)/2是正奇數,使得閉環系統是半全局一致最終有界的,同時在任意初始條件下所有誤差均可以在固定時間Ts內穩定在原點任意小的鄰域中。
考慮以下李雅普諾夫函數:
(20)
選擇設計參數使得:

令

(21)
(22)
(23)
計算所定義李雅普諾夫函數的導數。
假設Ω>0為閉環系統的初始條件的邊界,即V1(0)≤Ω。因此總可選擇合適的參數,使得以下不等式成立:
(24)
因此,{V1≤Ω}是一個不變集,并且對于所有t>0,V1(t)≤Ω都成立,這表明整個閉環系統是最終有界的。閉環系統可以固定時間內穩定在原點的一個小鄰域中,收斂時間上界為:
(25)
3 仿真結果
3.1 參數設置

假設空氣動力系數相對于標稱值有30%的不確定性。不失一般性,設計參數可選擇為p=9,q=6,k1=1,k2,=2,k3=5,k4=10,ci=0.08(i=1,2,3,4),τi=0.01(i=1,2,3)。導彈和目標的初始條件見表1。
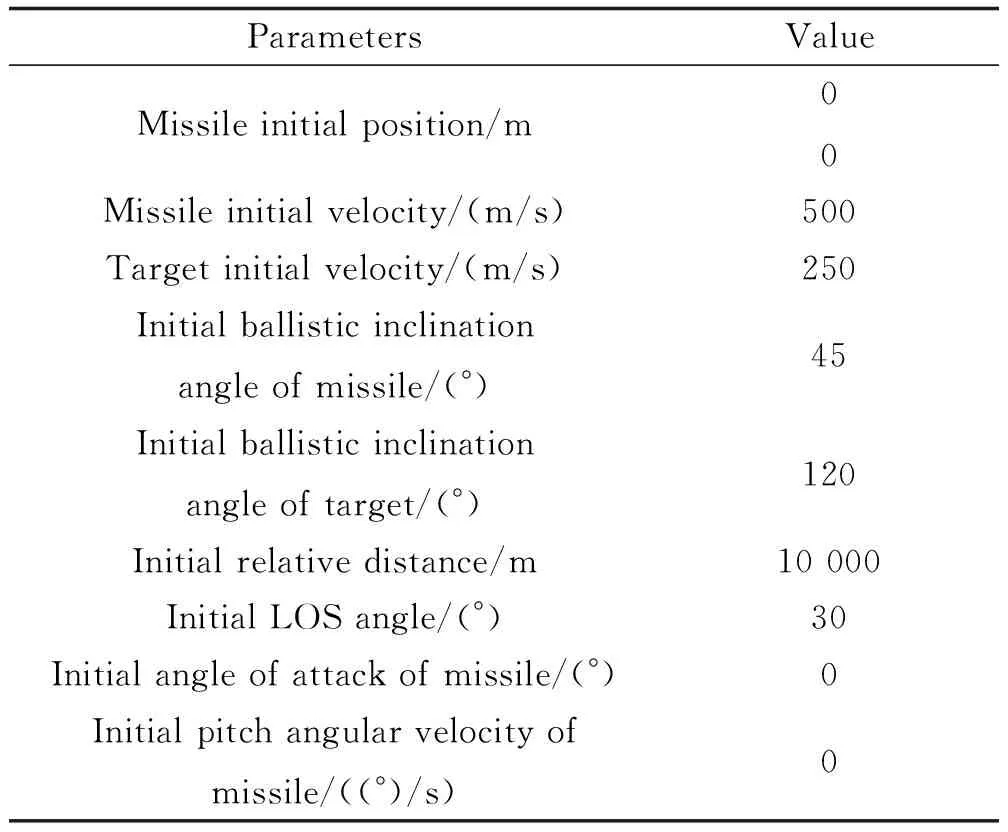
表1 初始條件Table 1 Initial condition
3.2 不同落角約束仿真
給出不同落角約束下機動目標攔截的仿真結果。期望落角γd分別選擇為0°、30°、60°和90°。仿真結果如圖2所示。
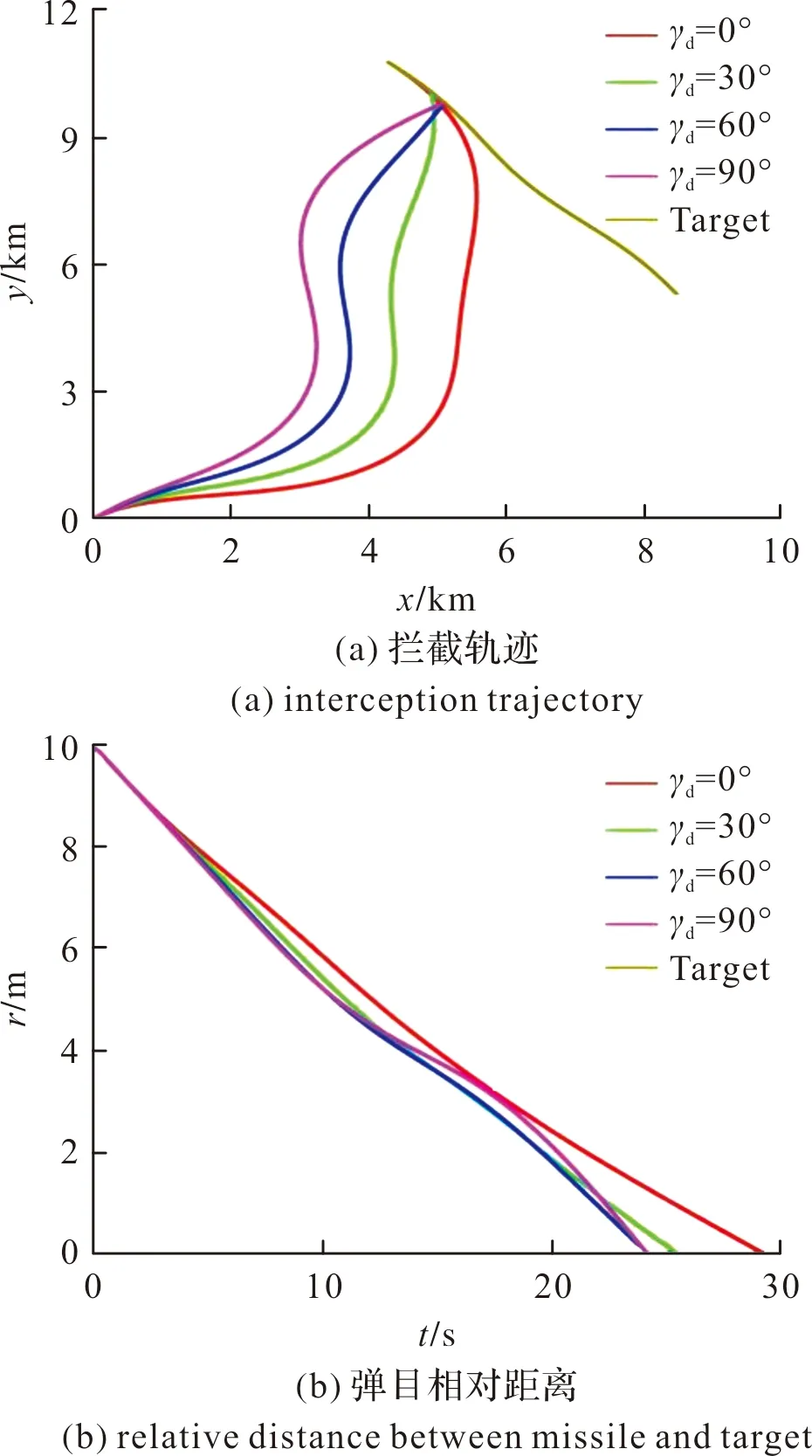
圖2 不同落角約束下的仿真結果Fig.2 Simulation result of different impact angle constraint
末端脫靶量和落角誤差如表2所示。從表2和圖2可以看出,文中所提出的制導控制一體化設計方法針對不同落角約束下的目標攔截問題,都能夠取得較小的脫靶量和落角誤差。具體而言,在所有攔截場景中落角誤差和脫靶量分別小于0.004°和0.4 m。從圖2還可以看出,在攔截過程中舵偏角在允許的最大值范圍內且較為平滑。
表2 脫靶量與落角誤差Table 2 The miss distance and impact angle error
3.3 對比仿真
為了突出文中所提出的制導控制一體化設計方法的優越性,給出了與非奇異終端滑模制導律文獻[7]和固定時間非奇異終端滑模制導律文獻[8]的對比仿真。加速度約束為|aM|≤200 m/s2,期望落角為γd=45°仿真結果如圖3所示。
圖3 對比仿真Fig.3 Comparative simulation
從圖中可以看出與文獻[7-8]中提出的方法相比,文中所設計的制導控制一體化方法能夠以相對更小的加速度和更短的攻擊時間獲得相對較高的命中精度。
4 結論
文中針對考慮氣動不確定性和落角約束的機動目標攔截問題,基于固定時間穩定性理論提出了一種制導控制一體化設計方法。利用典型的反步設計思想構建了滑模控制器,實現半全局固定時間一致最終有界穩定;同時通過引入固定時間微分器避免了典型反步設計存在的“微分膨脹”問題;并給出了李雅普諾夫函數框架下的穩定性分析。仿真結果與對比實驗充分證明了文中所提出的制導控制一體化設計方法的有效性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56