水電機組流激振蕩數值仿真
2023-09-12 06:17:34劉宛瑩陳啟卷肖志懷
水電與抽水蓄能 2023年4期
鄭 陽,劉宛瑩,陳啟卷,肖志懷
(武漢大學 水力機械過渡過程教育部重點實驗室,湖北省武漢市 430072)
0 引言
低頻振蕩現象長期以來被視為現代電力系統運行安全穩定性的重大隱患之一。近年來,隨著我國西南地區水電資源開發的蓬勃發展,出現了一系列具有水電高占比特點的電力系統,這些電力系統均存在著發生低頻振蕩(f∈0.1 ~2.5Hz)或超低頻振蕩(f<0.1Hz)的風險[1]。
文獻[3]研究了送端含有大型水電機群的交直流混聯系統中水電機組對電網低頻振蕩的影響及其有效抑制策略。文獻[4]探索了水電機組調速系統模型參數對藏中電網超低頻振蕩的影響規律,系統分析了調速系統參數對低頻振蕩的影響和各類水擊模型的適用范圍。文獻[5]對電站有壓管道長度、管道水體振動模式與電力系統低頻振蕩頻率間相關關系進行了分析;文獻[6]研究了尾水位、水力損失等參數對機組超低頻振蕩的影響。
本文針對四川省某大型水電站機組運行過程中出現的與電站尾水流道水力不平衡密切相關的持續性有功功率超低頻振蕩現象,采取電路等效法構建電站尾水流道的微分方程組數學模型,并分別開展時域數值仿真與特征值分布規律分析。
1 水電站尾水系統電路等效模型
國內某大型水電站尾水系統為一洞兩機布置型式,有壓管道與無壓隧洞連接的出流結構。尾水系統結構示意圖如圖1 所示,系統中各項水工建筑的結構參數設置參見文獻[6]。
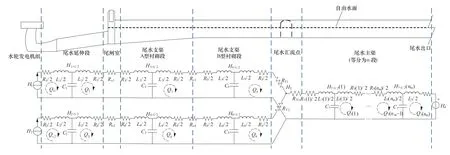
圖1 某水電站明滿流尾水系統電路等效模型Figure 1 Equivalent circuit model of the tailrace system of a hydropower plant with pipe and channel flows
通過引入有壓管道與無壓明渠的電路等效理論[6,7],可以同時繪制出電站尾水系統的整體電路等效模型拓撲。模型中各水力組成元件的電路等效模型可參考文獻[6],根據基爾霍夫電壓電流定律[8],由于尾水流道主渠長度遠大于其他各管、渠段,將其按長度等分為12 段,尾水系統其他管段均設為1 段。尾水系統的整體微分方程模型的矩陣形式如式(1)所示:
2 數值仿真與結果分析
為了從時域與頻域兩個角度分析電站尾水系統在較低水位出現的超低頻振蕩現象,本研究分別以電站尾水位和尾水支渠局部水力損失為控制變量,通過時域數值仿真和特征頻率分析相結合的方法,分析不同因素對系統穩定性的影響。
2.1 尾水水位對系統穩定性的影響
針對電站下游水位不同時雙機額定功率運行狀態下系統水力動態開展時域仿真,探索尾水位變化對尾水系統中水力振蕩的影響。研究選取電站尾水出口明渠水深分別為7.0m,7.5m和8.0m 的運行工況進行仿真。電站尾水位對系統超低頻振蕩的影響趨勢如圖2 所示。由圖2 可知,尾水位對系統超低頻振蕩影響明顯,假設各曲線對應工況具有完全相同的管道、渠道糙率和局部水力損失系數,尾閘室的水壓振蕩幅值隨尾水位的升高而明顯減小,說明由于電站尾水流道水力不平衡因素導致的機組有功功率波動現象只存在于部分運行工況,且與下游河道的尾水位密切相關,尾水位較低時易出現振蕩現象。
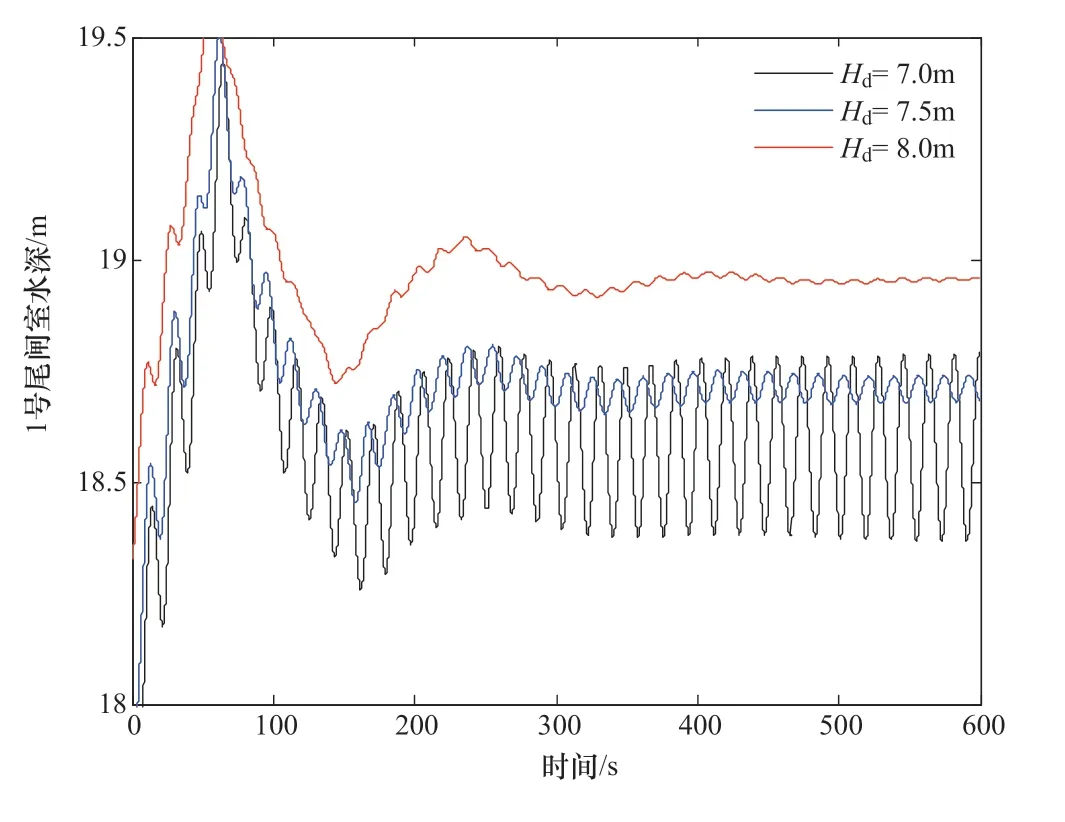
圖2 不同電站下游水位時尾閘室水深時域仿真曲線Figure 2 Curves of the water depth at the tailrace gate chamber at different tailrace levels
狀態方程系統矩陣的特征值可用于判斷系統穩定性:特征值的實部代表振蕩的衰減因子,當特征值實部均分布在復平面左半平面時,系統趨于穩定。特征值的虛部代表系統的特征頻率,相應的特征向量表示振型。由于針對電站尾水系統所建立的狀態空間方程形式數學模型屬于非定常參數狀態空間方程模型,在動態過程中模型的參數矩陣A、B、C隨系統狀態不斷變化。因此,用系統某一平衡點處的線性化定常參數模型進行特征值分析難以完全描述系統穩定性表現,研究采用變參數模型計算尾水系統在各采樣時刻的特征值,并統計整個動態過程中特征值分布軌跡能夠更直觀地觀察系統穩定性。
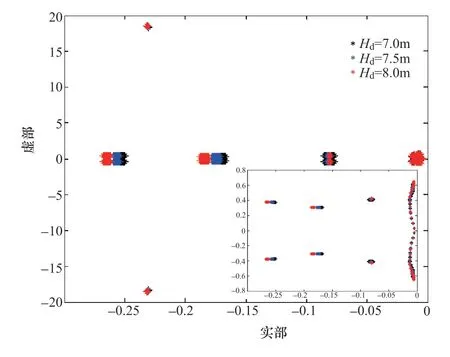
圖3 不同電站下游水位時尾水系統特征值分布Figure 3 Eigenvalue distribution of the system at different tailrace levels
2.2 局部水力損失對系統穩定性的影響
為探究水電站低尾水位工況下運行時的抑制或消除上述水力振蕩的有效方法,研究以尾水水深Hd=7.0m 工況為例,分別對尾水支渠上增加不同大小的局部水力損失的系統水力動態進行時域仿真,分析尾水水力振蕩與尾水流道局部水力損失之間的關系。對比兩段尾水支渠在原始系統仿真參數設置條件下以及同時將兩支渠局部水力損失系數分別增加Δη1=0.340 和Δη2=0.605兩種情況對應的尾閘室水深動態過程時域曲線如圖4 所示。
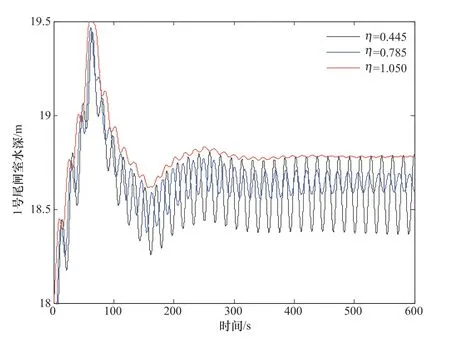
圖4 不同尾水支渠局部水力損失時尾閘室水深時域仿真曲線Figure 4 Curves of the water depth at the tailrace gate chamber with different local hydraulic losses on the branch channels
由圖4 可知,通過在兩支渠上同時增加水力損失可以達到抑制尾水系統水力周期性振蕩的效果,當局部水力損失系數增量達到Δη2時,尾閘室處水力振蕩基本消失。
進一步分析不同尾水支渠水力損失系數條件下尾水系統的特征值分布情況,如圖5 所示。從圖中可以看出,與第2.1節的特征值分析結果相類似,三種不同尾水支渠局部水力損失系數條件下,尾水系統各階特征值的虛部基本保持一致,并且隨著支渠局部水力損失系數的增大,特征值實部距離復平面縱軸的水平距離隨之增大,振蕩衰減速度更快,說明工程中有望通過提高尾水支渠處對應的局部水力損失的相關方案來實現該類低頻振蕩的抑制甚至消除。

圖5 不同尾水支渠局部水力損失時尾水系統特征值分布Figure 5 Eigenvalue distribution of the system with different local hydraulic losses on the branch channels
3 結束語
本文采取電路等效法建立了電站明滿流尾水系統高階數學模型,在所建模型基礎上分別開展了不同尾水位和不同尾水支渠局部水力損失狀態下的系統時域仿真,探索關鍵節點處水力波動的變化規律,并對系統進行特征頻率分析,分析系統穩定性變化規律,尋求抑制超低頻振蕩的合理解決方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19