智能護理機器人在居所中的研究與應用
2023-09-11 08:00:20王波梁魯陽孔慶瑩
電子制作 2023年15期
王波,梁魯陽,孔慶瑩
(1.廣東省機械技師學院,廣東廣州,510450;2.佛山市順德區新大通工藝電器有限公司,廣東佛山,528000)
0 引言
隨著我國老齡化社會的到來,老人失能化趨勢明顯[1],養老問題日益嚴峻,“南粵家政”工程的提出恰逢其時。據統計,我國現有老年人口1.32 億,并每年以3.2%的速度增長;80 歲以上的高齡老人每年以5%的速度增長;全國臥床、生活不能自理的病人和老人2700 萬,半身不遂病人70萬人,老年癡呆病人85 萬[2,3]。老齡化問題已成為事關國計民生的大事情,很多家庭的養老負擔也越來越重。
本文提出研究和開發一種智能護理機器人,并在居所中應用和推廣。在具備完善的護理自動化、智能化功能基礎上,以能護理機器人為中心,通過人工智能、物聯網、健康大數據分析等搭建線下、線上智能監護養老服務平臺。本系統的應用和推廣,將很大程度上減輕社會養老的壓力,為“南粵家政”工程的推進提供有力支撐。同時,本文重點研究了護理機器人在居所中的移動和導航方法,通過引入UWB 技術,再結合編碼器和電子羅盤,最終實現護理機器人在室內定位和自主導航。
1 智能監護養老服務平臺的組成
本文提出的智能監護養老服務平臺,由擁有“床-椅”姿態變換、人體生理參數監控系統、護理與按摩的多功能智能護理床、智能護理機器人為載體,運用物聯網技術將設備端的個人信息、設備運行狀態、實時健康數據、視頻數據上傳至智能云平臺。云平臺對患者狀態進行分析并反饋給客戶端,客戶端通過接口訪問云平臺,可以實現多種終端的實時監控,同時用戶也可以采用多種模式遠程控制護理床姿態,個性化定制功能,最終構建一個以智能化、自主化的管理平臺。具體的護理系統架構如圖1 所示。
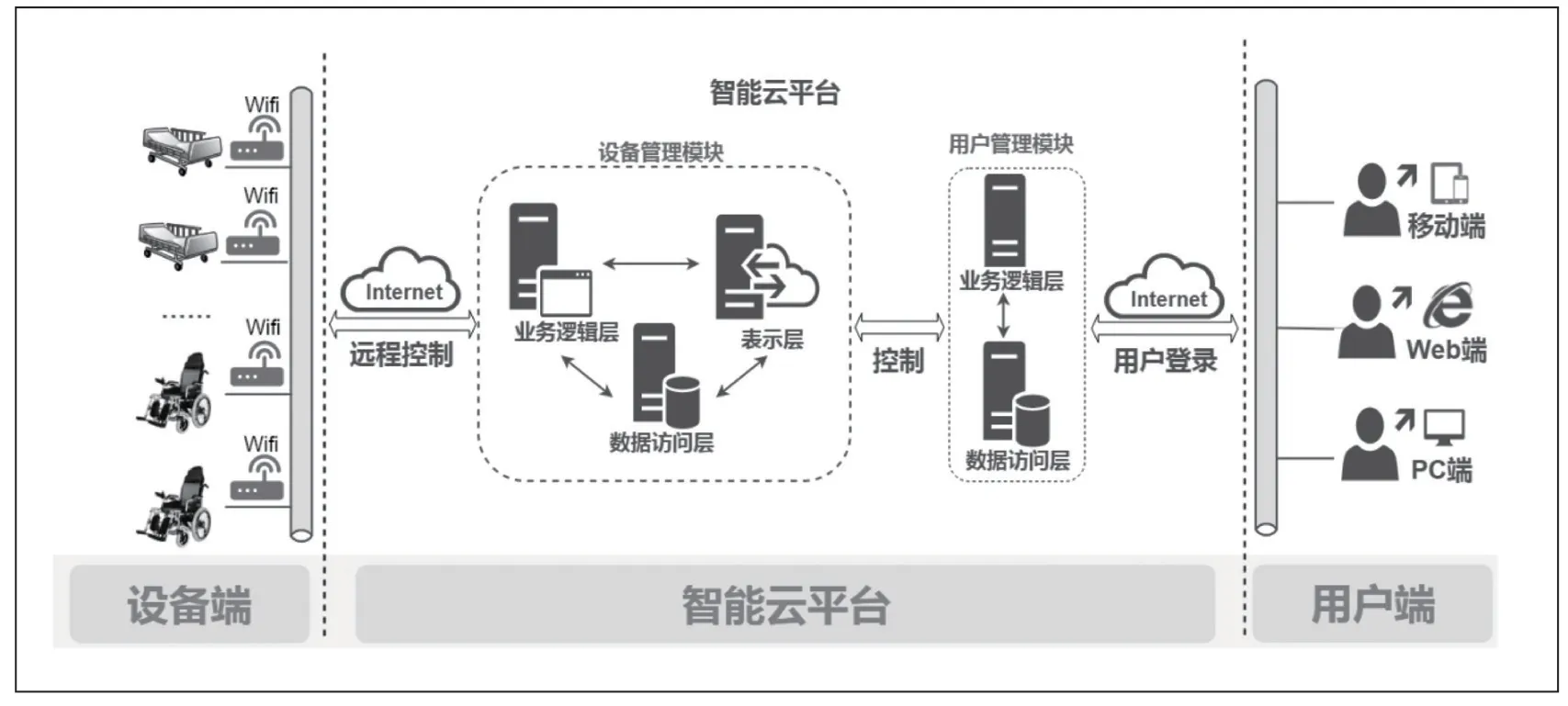
圖1 智能監護養老服務平臺架構
■1.1 智能護理機器人系統設備參數
智能護理機器人是整個能監護養老服務平臺的核心,本文將重點從智能護理機器人的開發與應用做全面的分析和研究。智能護理機器人具備兩個可實現室內移動的驅動輪,并且擁有“床-椅”兩種姿態,實物如圖2 所示。
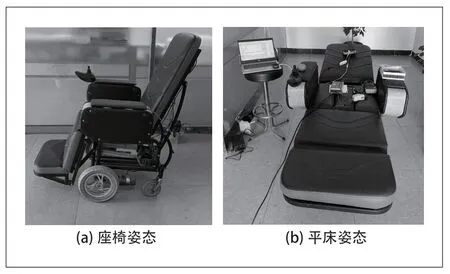
圖2 智能護理機器人“床-椅”兩種姿態實物圖
智能護理機器人,具備的關鍵的功能及其參數如表1所示。
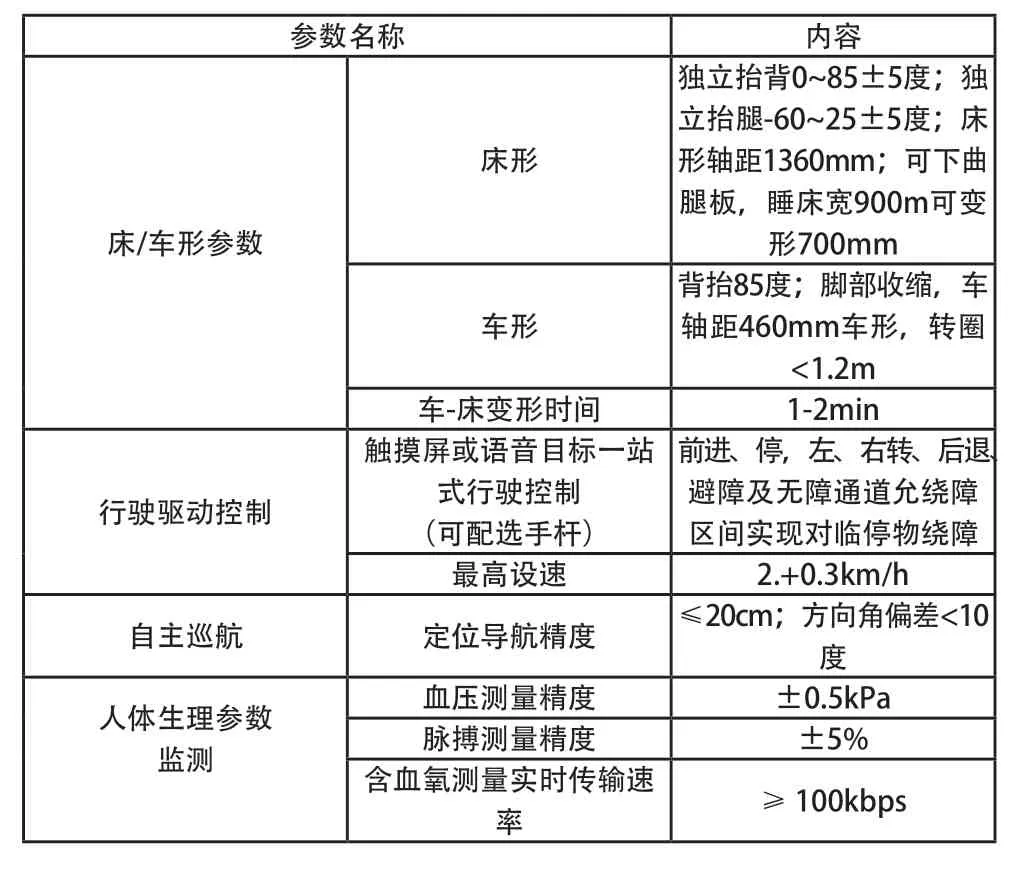
表1 智能護理機器人關鍵功能及參數
■1.2 智能護理機器人系統硬件組成
智能護理機器人主要包括:①2 個驅動輪,2 個萬向輪,驅動輪轉動力矩由兩臺直流電機提供;②3 個推桿電機,實現“床-椅”兩種姿態的變換;③1 套主控制器,用于控制驅動輪的轉動和“床-椅”兩種姿態的變換,并且負責定位和移動速度、角度等數據的接收和處理,是智能護理機器人的核心。
主控制器設計和安裝接線如圖3 所示。
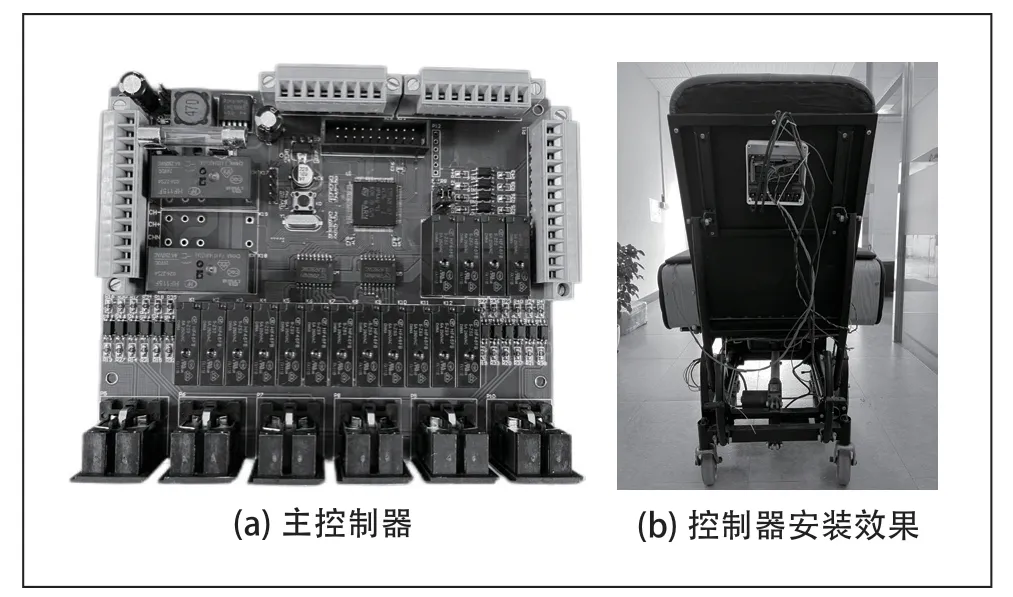
圖3 智能護理機器人主控制器及其安裝
2 運動控制系統設計
■2.1 運動學模型
本文設計的智能護理機器人采用兩輪差速的驅動方式,該驅動方式下,位姿計算是機器人運動控制過程中的關鍵[4]。位姿是指機器人在絕對坐標系中的位置和姿態,在此定義:(1)左右兩輪的軸距為D;(2)中心點為Q(x,y);(3)兩輪連線的中垂線為l。那么,位姿可用P=[x,y,θ]T來表示,其中,x和y分別表示中心點Q相對于絕對坐標系Y 軸和X軸的距離,θ表示中垂線l與Y軸的夾角。智能護理機器人的運動學模型如圖4 所示。
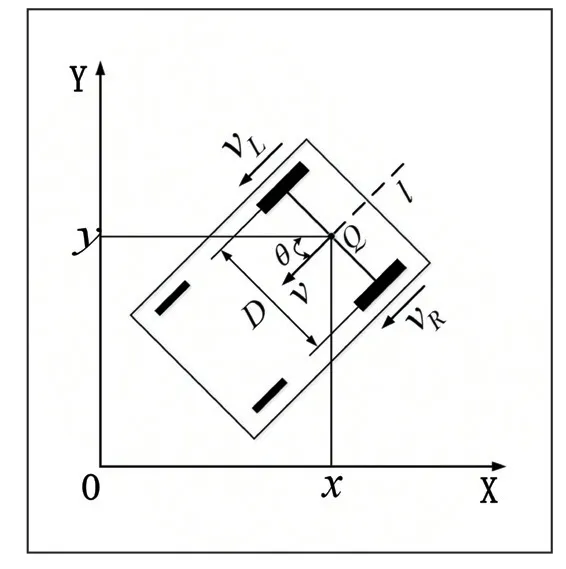
圖4 智能護理機器人運動學模型
在圖4 中,假設t時刻左右兩輪的線速度分別為vL和vR,則有:
其中,v為中心點Q的線速度,ω為中心點Q的角速度,對位姿進行離散化之后得:
假設機器人的初始姿態為P0=[x0,y0,θ0]T,則任意時刻的姿態為:
■2.2 UWB 定位系統
自主巡航是智能護理機器人關鍵技術,基于超寬帶技術(Ultra Wide Band,UWB)的室內定位實現自主巡航。UWB 是無線電通信技術的一種新方向,被認為是當今最具發展的通信技術之一[5]。關于室內定位導航問題, GPS 導航面臨信號弱和定位精度不高的問題[6],視覺定位容易受居所光線和復雜環境影響,RFID 標簽和二維碼標簽布局的維護難等問題,UWB 定位技術可以很大程度克服上述的不足,并且安裝方便,精度也較為理想。
根據上述的運動學模型,當智能護理機器人移動時,慣性導航提供的位置數據存在累計誤差,且在居所復雜的環境下難以提供實時的位置數據,慣性導航結合UWB 定位系統,則可以很好解決實時定位和重復定位的問題。
2.2.1 UWB 定位系統設計
該系統主要包括1 個PC 基站、4 個定位基站、1 個機載UWB 標簽以及上位機系統等。其主要工作是測量機載標簽到A、B、C、D 四個定位基站的距離,標簽將相關數據返回給PC 基站。PC 基站與上位機連接,上位機收到PC基站數據后,計算得到三維定位數據,再將定位數據下發至運動控制系統。UWB 定位系統框架如圖5 所示。
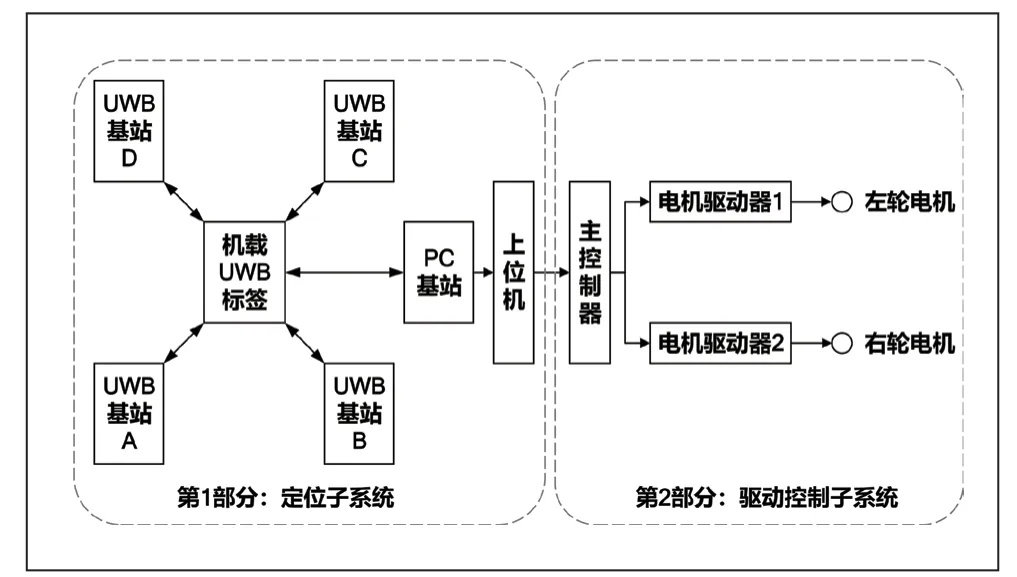
圖5 智能護理機器人UWB 定位系統框架
2.2.2 UWB 定位算法的實現
UWB 定位算法主要使用到:(1)SDS-TWR 測距算法,獲取標簽到基站的距離;(2)三邊定位法,計算出唯一的交點作為標簽的位置坐標。
(1)SDS-TWR 測距算法
SDS-TWR 測距算法由于對非對稱雙邊雙向測距算法進行了優化,對時延導致的誤差可以起到較好的消除作用。SDS-TWR 測距算法示意圖如圖6 所示。

圖6 SDS-TWR 測距算法示意圖
其中,將模塊A 和模塊B 之間的信號傳播時間記為TOF,模塊A 接收到模塊B 信號后等待時間記為TreplyA,模塊B 接收到模塊A 信號后等待時間記為TreplyB。則可以得到如下式子:
則兩節點間距離為:
其中,c為光速,D為兩點間測距距離。
(2)三邊定位算法
如圖7 所示,通過SDS-TWR 測距算法,機載UWB 標簽輪流與A、B、C、D 四個定位基站進行測距,得到標簽到四個定位基站的距離:d1,d2,d3,d4;再根據三邊定位法計算得到標簽的實際二維坐標。
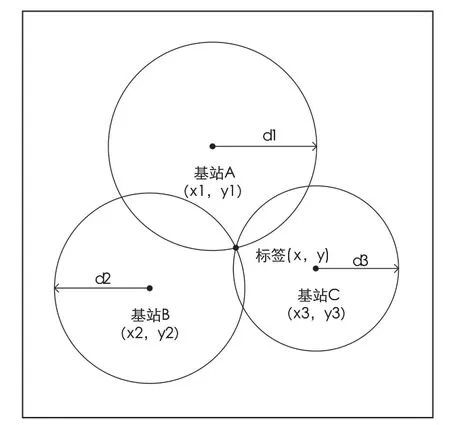
圖7 三邊定位法原理
假設4 個定位基站的位置坐標為:A(x1,y1),B(x2,y2),C(x3,y3),D(x4,y4),采用TOF 方式進行測距,并分別記標簽與定位基站的距離為:d1,d2,d3,d4,整合后得到如下的方程組:
在(9)式中,任意一個方程與最后一個方程進行減運算,轉換成矩陣的形式,結果如下:
最終得到解為:
最終的X即為二維平面定位數據,但是此時的定位數據波動較大,可以通過引入卡爾曼濾波的方法對定位數據進行優化處理。
■2.3 卡爾曼濾波算法
系統的控制輸入和測量數據作為卡爾曼濾波估計狀態的關鍵,用TOF 測距算法得到的距離值與距離變化率可以作為系統狀態向量[7],得到卡爾曼濾波的測距模型為:
卡爾曼濾波的增益矩陣如下:
上式中 ,k和k-1 分別表示當前狀態和前一狀態,X為先驗估計的k時刻狀態矩陣,Zk為實際觀察量,Ak-1為狀態變換矩陣,Hk為實際觀測矩陣,Wk-1和kV為噪聲協方差矩陣。Kk為卡爾曼增益,Pk|k-1預測協方差矩陣。當Pk|k-1增大時,Kk增大,Vk增大,隨之Kk相應減小。
■2.4 控制系統框架設計
智能護理機器人的運動控制模式為三閉環串級控制系統,由位置控制環、速度控制環和姿態控制環構成。如圖8所示。
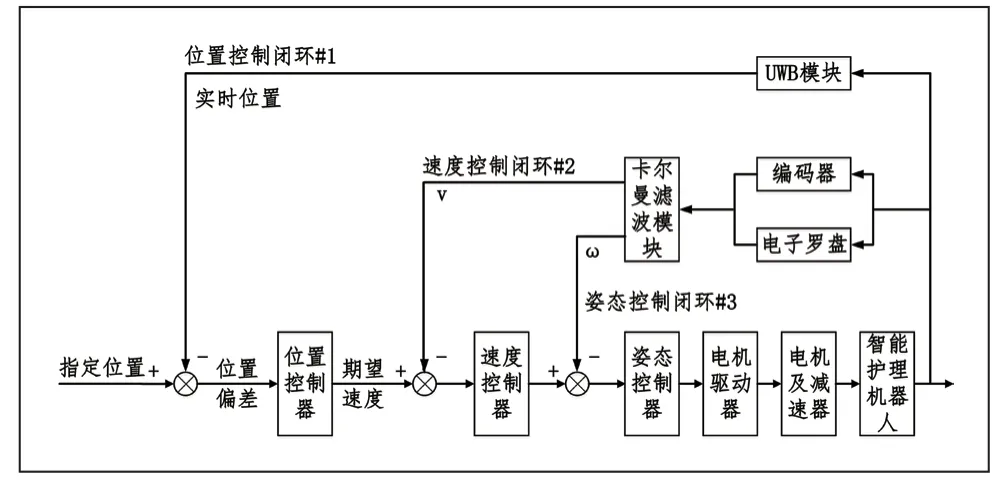
圖8 智能護理機器人運動控制系統框架
其中,編碼器用于實時采樣機器人左右兩輪的線速度vL和vR,電子羅盤用于實時采樣機器人兩輪連線的中垂線為l的方向,經過卡爾曼濾波器解算得到機器人兩輪中心點Q的線速度v和角速度ω。
3 實驗及其分析
■3.1 實驗平臺
本實驗基于兩輪差動智能護理機器人實體平臺展開實驗,基于慣性導航和UWB 定位技術實現機器人在居所內的自主巡航。首先,是以1 個PC 基站、4 個定位基站、1 個機載標簽搭建了二維定位系統,并在上述搭建的平臺進行了相關實驗。
■3.2 實驗效果
在居所內指定某個坐標點為目標位置,并記為:O( 0,0)。智能護理機器人從不同的初始位置出發,運行至目標位置。
UWB 定位技術基于三邊定位算法,該直接解算的定位數據誤差較大,引入了卡爾曼濾波,經過多次反復實驗,智能機器人運行至目標位置O( 0,0),其誤差絕對值基本上保持在10cm 范圍,可以明顯看到卡爾曼濾波很大程度上提高了定位的精度,如圖9 所示。
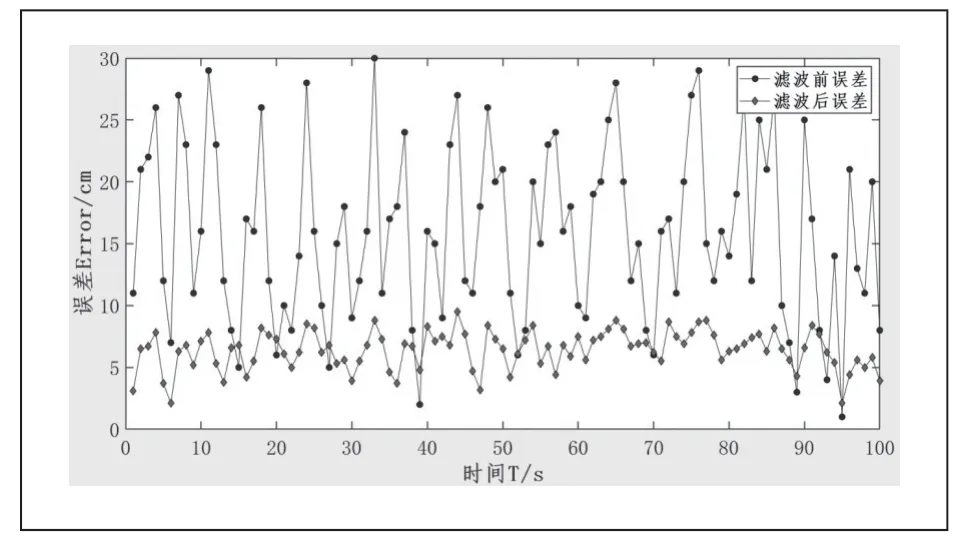
圖9 濾波前后定位誤差
4 結論
本文提出的智能養老護理機器人平臺,在確保安全情況下,實現了通過多種途徑(語音、手機、手動等)進行操作,大大提高了護理人員的工作效率,減少工作強度;根據臥床老人的舒適度大數據分析結果,利用機器人多軸控制技術實現了智能床不同體位變換和個性化舒適度設置;基于慣性導航和UWB 定位技術的護理機器人,可以實現在居所內的自主巡航。本文的研究,充分發揮了“互聯網+”及人工智能家居產品的優勢,也從一定程度上助推了“南粵家政”工程的發展,進而緩解日益增加的社會養老壓力,使得長期臥床的病人以及需要護理的人員居家護理的條件將得到巨大的改變,具有前瞻布局意義。
猜你喜歡
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
基層中醫藥(2018年2期)2018-05-31 08:45:06
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
民生周刊(2017年19期)2017-10-25 15:47:39
華人時刊(2017年19期)2017-02-03 02:51:37
大社會(2016年5期)2016-05-04 03:41:44
電源技術(2016年9期)2016-02-27 09:05:39