某艦載火控雷達天線座結構設計
2023-09-05 01:38:22周麗陽陳超朋張雷亭趙選榮
艦船電子對抗 2023年4期
周麗陽,陳超朋,張雷亭,趙選榮
(中國電子科技集團公司第二十研究所,陜西 西安 710068)
0 引 言
艦載火控雷達是艦炮武器系統的重要組成部分,它的性能直接決定艦炮武器系統的打擊能力[1]。隨著艦艇武器技術的發展和現代海戰的升級,艦載火控雷達作為艦炮武器系統的眼睛和實時控制系統,可以對敵方目標進行探測和跟蹤,實時準確地提供目標的位置信息,經火控系統解算后,有效殺傷敵方來襲目標[2-3]。
天線座是雷達天線的定向和支撐裝置,它通過伺服系統控制天線按照預定的規律轉動,并完成運轉狀態下各種信號的傳遞。早期的雷達系統性能相對較低,對天線座的結構要求相對簡單。隨著現代電子信息技術的迅速發展和雷達技術在航海、航天、航空等領域的廣泛應用,對天線座的設計提出了更高的要求[4]。天線座結構形式復雜繁多,對加工制造工藝要求高,工作時承受靜力、炮振、沖擊等多種載荷,并且對雷達整機的精度、可靠性、成本和加工周期的影響較大,也是影響雷達整機性能的重要因素[5]。
在傳統的天線座結構設計中,設計人員一般根據實際工程經驗,利用類比法和經驗公式進行方案設計和一些簡單的核算,這樣必然會出現為了增加安全系數,保證天線座的強度剛度,導致結構件重量增加、傳動系統靈活性降低等問題[6]。近年來,天線座結構設計領域逐步引入了一些新的方法和手段,如虛擬樣機技術、結構優化設計方法以及有限元分析方法等,不斷向理論化、科學化的方向發展。
本文主要研究某艦載火控雷達天線座的結構設計,運用UG軟件建立天線座的三維模型,計算天線座所受的主要載荷并對其軸系精度進行分析,最后利用有限元分析軟件對天線座進行模態分析,裝配完成后進行振動試驗。結果表明該天線座精度高,穩定性強,可靠性高,滿足系統指標要求。
1 天線座結構設計
天線座是雷達的主要組成部分,雷達天線座的設計要滿足雷達的用途、使用條件和性能指標。天線座的設計要保證天線陣面的轉動范圍、天線陣面轉動的角速度和角加速度、伺服系統的精度要求、天線座的剛度、在極限環境下天線座的強度、系統要求的外形尺寸和重量等要求。根據指標要求,本天線座采用俯仰-方位型天線座結構型式,俯仰叉臂內側安裝天線陣面,俯仰軸通過天線陣面重心,天線上安裝光電望遠鏡,同時叉臂外側預留光電望遠鏡安裝接口。方位和俯仰均采用力矩電機套軸直接驅動的形式,采用多極旋轉變壓器作為角度傳感器。天線陣面和天線座結構如圖1所示。
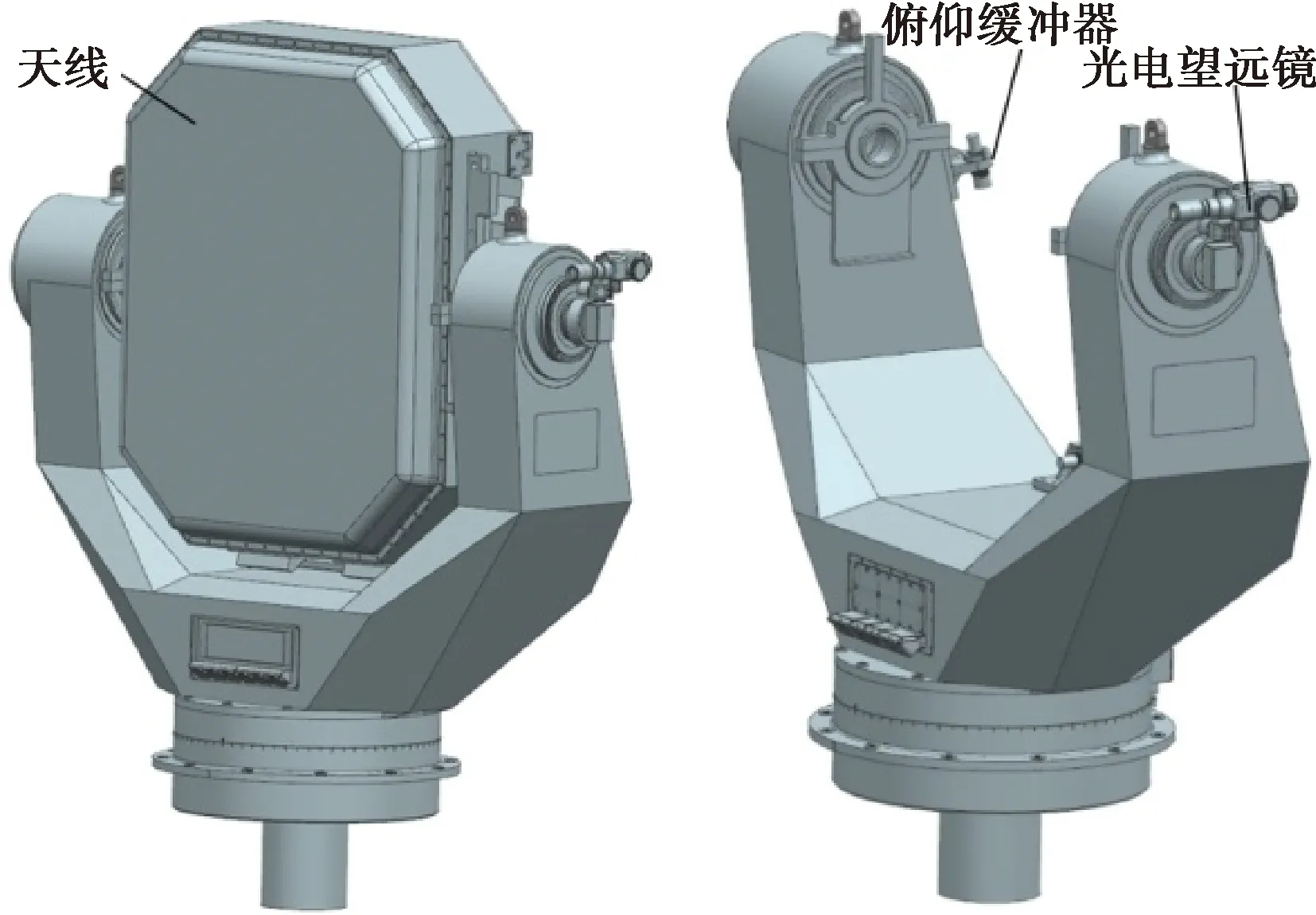
圖1 天線陣面和天線座結構三維示意圖
1.1 天線座的結構組成
俯仰-方位型天線座結構承載大,精度高,結構緊湊,結構剛性好,便于維修。其主要組成有方位傳動、俯仰傳動以及輔助功能模塊。輔助功能模塊有起保護作用的鎖定裝置、緩沖器等。俯仰傳動和方位傳動為各組合、模塊以及外購件等提供合理的安裝位置以及線纜轉接接口。
(1) 俯仰傳動裝置
俯仰傳動裝置主要由俯仰殼體、俯仰電機、主軸(由2個半軸組成)、軸承、軸承座、多極旋變等組成。俯仰傳動裝置通過2個半軸將天線陣面連接在一起。2個半軸互相獨立,自成體系。每個半軸通過2個角接觸球軸承背靠背安裝進行定位和支撐。其中一個半軸同軸安裝力矩電機,實現天線陣面俯仰轉動;另一個半軸安裝多極旋變,實現天線陣面俯仰角度的實時采集。俯仰傳動裝置主要組成如圖2所示。
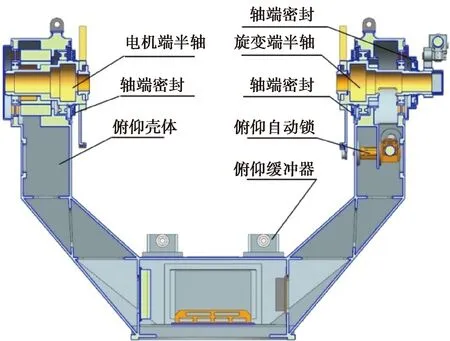
圖2 俯仰傳動裝置主要組成示意圖
(2) 方位傳動裝置
方位傳動裝置主要由方位殼體、方位杯型件、方位軸承、下方位殼體、方位電機、多極旋變和匯流環組成。方位傳動裝置通過軸承將方位殼體與杯型件相連,方位殼體通過方位安裝面與炮架安裝臺相連,方位杯型件通過螺栓與俯仰部分連接組成天線座。方位傳動通過力矩電機套軸驅動,實現天線陣面方位轉動。通過多極旋變同軸安裝,實現天線陣面俯仰角度的實時采集。方位傳動裝置主要組成如圖3所示。
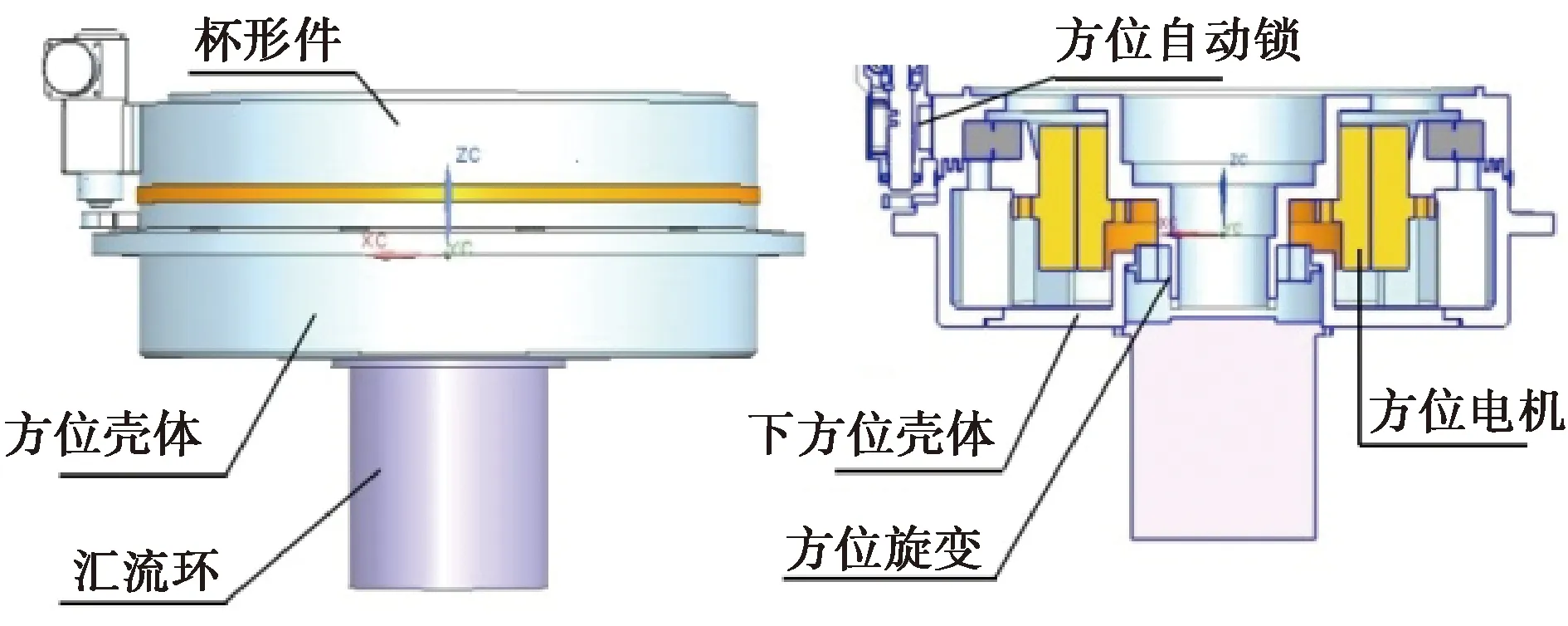
圖3 方位傳動裝置主要組成示意圖
(3) 鎖定裝置
該天線座方位、俯仰傳動均安裝有自動鎖定裝置,鎖定裝置選用經其他成熟系列雷達充分驗證、并已作為通用件推廣使用的自動鎖模塊。方位鎖及俯仰鎖結構外形如圖4所示。
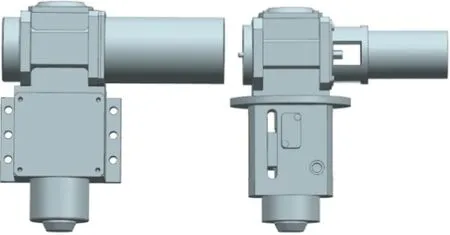
圖4 鎖定裝置三維結構示意圖
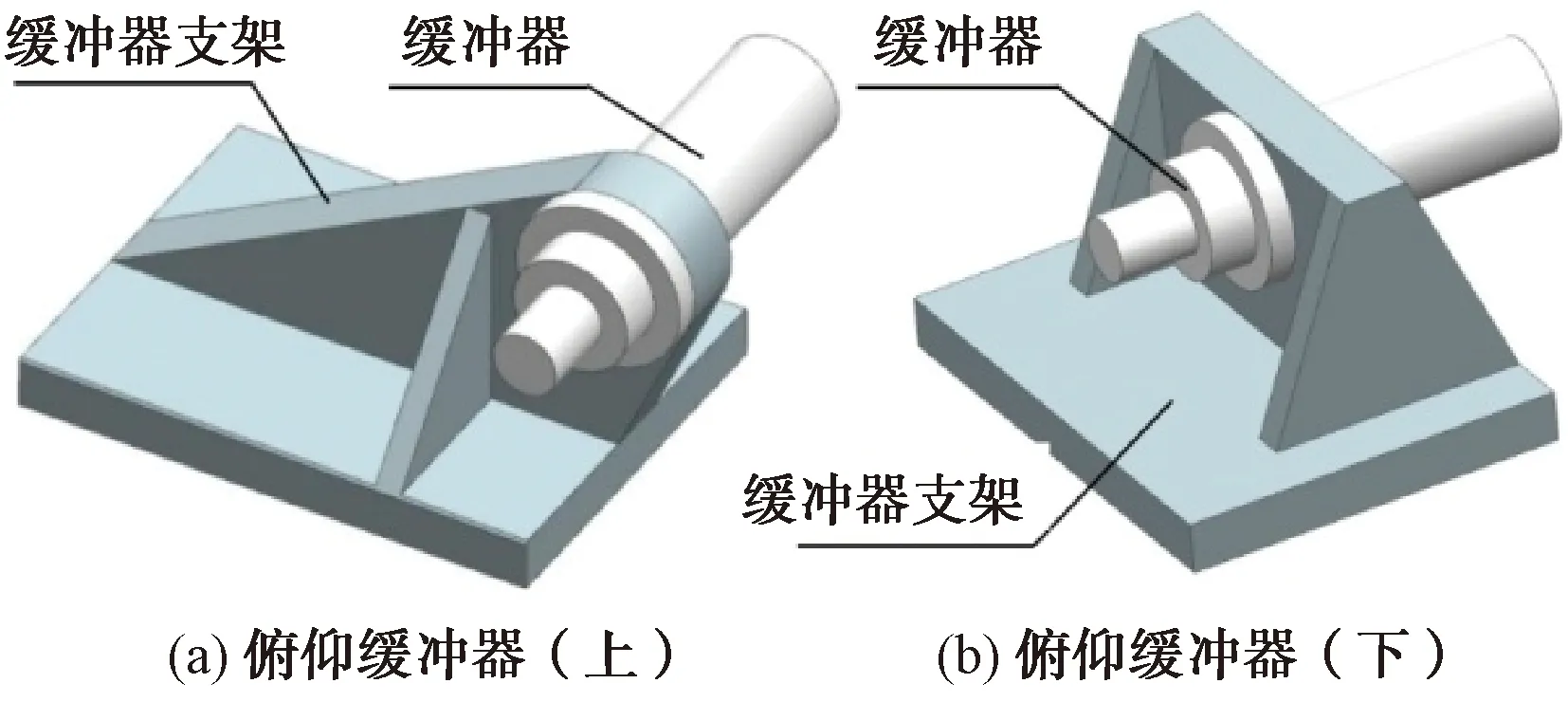
圖5 俯仰緩沖器三維結構示意圖
(4) 俯仰緩沖裝置
由于該雷達俯仰轉動范圍為-16°~+68°,需安裝緩沖器來防止失控而損壞天線和線纜。本文按照《雷達天線座緩沖器通用設計方法》對俯仰緩沖器進行設計。
1.2 天線座主要參數分析計算
(1) 天線座典型載荷計算
對于俯仰-方位型天線座,所受的主要載荷有慣性力矩、風力矩、摩擦力矩和不平衡力矩等[7]。通過計算天線座的典型載荷,得到天線座方位傳動和俯仰傳動的總力矩,為俯仰電機和方位電機的選型提供指導:
(1)
M1=(J+m×r2)×β
(2)
M2=M5+F×r+M6
(3)
M3=μ×G×r
(4)
M4=G×r×sinα
(5)
式中:M總為總力矩;M1為慣性力矩;M2為風力距;M3為摩擦力矩;M4為不平衡力矩;M5為重心位置風力矩;M6為轉動阻尼風力矩;J為轉動慣量;m為陣面天線的質量;r為重心距離;β為角加速度;μ為滑動摩擦系數;G為載荷;α為最大傾覆角。
典型載荷按照均方根進行計算的結果如表1所示。
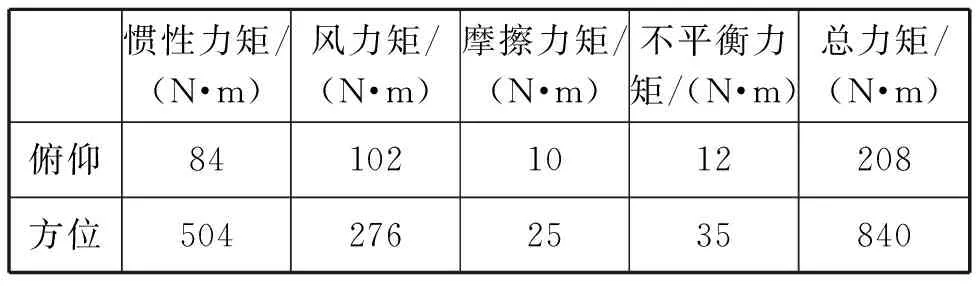
表1 典型載荷計算結果
(2) 天線座軸系精度分析
(a) 方位軸與俯仰軸的不垂直度
對于方位俯仰型天線座,影響其方位軸和俯仰軸不垂直度的因素主要有2種類型:一種是加工公差(如殼體的尺寸公差,形位公差(同軸度、平行度、垂直度)等);一種是軸承的精度。加工公差是固有因素,可以少量進行調整,軸承精度是隨機產生的,無法調整。
設δ為高度差,L為跨度,根據設計計算出方位軸線和俯仰軸線的不垂直度:
α=arctan(δ/L)×3 600″≈19.06″
(b) 水平調整剩余誤差

(c) 光機匹配調整剩余誤差
此部分主要靠調整環節、操作者經驗、光機匹配工裝的精度來保證,以往成熟產品的生產工藝可將該誤差控制在≤30″的范圍內。
2 模態分析及試驗驗證
模態是結構的固有屬性[8],與產品的性能、壽命、安全性以及可靠性、經濟性等息息相關。為了適應雷達快速響應的要求,減小伺服系統的動態跟蹤誤差,天線座的一階固有頻率應盡量提高[9]。
2.1 模態分析
由于試驗時天線座安裝于振動支架上,為了使試驗和仿真邊界條件相同,便于分析比較,在有限元分析模型中增加振動支架的有限元模型,可以進一步提高有限元分析和建模的正確性和準確性[10]。
本文首先通過UG軟件建立天線座和振動支架的三維模型,利用Hypermesh有限元前處理軟件對天線座結構進行離散,考慮到模型準確性與建模經濟性,對結構進行適當的簡化,刪除對仿真結果影響較小的圓角、倒角等特征,得到天線座有限元模型。天線座模型離散為四面體單元;用梁單元模擬軸承連接;螺栓連接用剛性單元與梁單元結合的方式模擬;小質量設備采用質量點單元模擬,并通過柔性單元連接到對應安裝面上。
模態計算時,約束振動支架的底部,基于Lamczos法對天線座模型進行計算,得到其前四階模態結果如圖6所示。
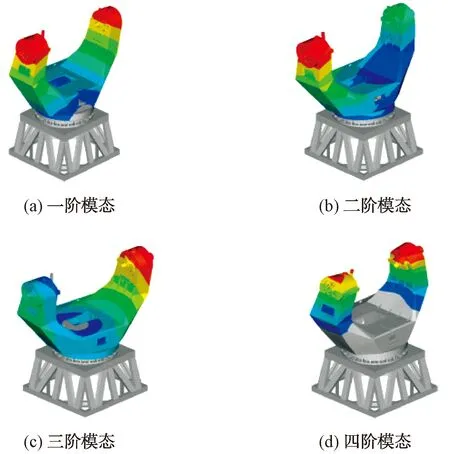
圖6 天線座前四階模態
由圖6可看出:天線座的一到四階模態分別約為30.1 Hz、35.5 Hz、39.9 Hz、76.7 Hz。一階模態為天線座橫向的擺動,二階模態為天線座射向的擺動,三階模態為方位傳動的擺動,四階模態為俯仰傳動的擺動。各階模態中振動支架幾乎沒有變形,說明其對天線座的模態幾乎沒有影響,設計合理。
2.2 試驗驗證
利用單軸振動臺對天線座射向、橫向以及垂向進行掃頻試驗,從而獲取各方向的固有模態。試驗采用對數掃頻法,通過設置恒定加速度或恒定位移(如表2所示),進而獲得被測試件不同頻率下的響應,此方法可在保證試驗準確性的同時縮短試驗時間[11]。
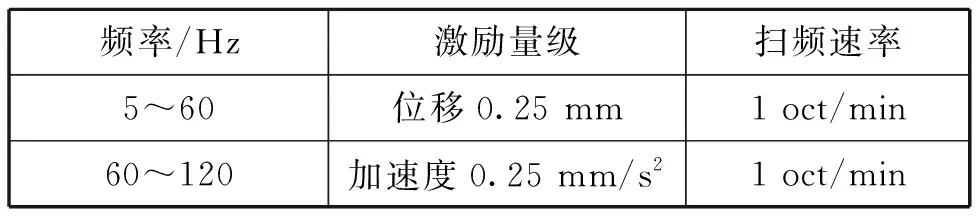
表2 掃頻試驗參數
掃頻試驗獲得的響應數據為隨時間變化的時域信息,且加速度數據樣本為離散形式。將這些時域信號通過傅里葉變換可以獲得對應的頻域信號,得到不同頻率下天線座的功率譜如圖7所示。

圖7 天線座掃頻頻域數據
由圖8可知,天線座進行掃頻試驗得到其固有頻率射向為35 Hz,橫向為30 Hz,垂向為83 Hz。將各軸向固有頻率按照從低到高排序,并與有限元分析頻率和振型對比,如圖8所示,發現試驗結果缺少第三階模態。王飛朝[12]在試驗中也發現了此模態丟失現象。主要是由于振動臺是單軸,且施加激勵量級較小的原因導致,不影響后續分析。把仿真分析與試驗結果進行比較,最大誤差7.6%,說明天線座有限元仿真的準確性高。根據各階模態的分布情況、固有頻率的大小及振型,可認為該天線座的設計是合理的,能夠滿足該艦載火控雷達的使用要求。

圖8 雷達天線仿真與試驗對比
3 結束語
本文對某艦載火控雷達的天線座總體結構方案設計進行簡要描述,建立天線座的三維模型,計算其所受的主要載荷及軸系精度,利用有限元分析軟件對天線座進行模態分析,提取前四階模態并與試驗結果進行對比。結果表明:試驗與仿真間的誤差小,驗證了有限元模型仿真的準確性,以及有限元分析在降低研發成本方面的必要性和可行性。該天線座精度高,穩定性強,可靠性高,滿足系統指標要求。
猜你喜歡
上海節能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
